Virtual Ground Amplifiers
advertisement

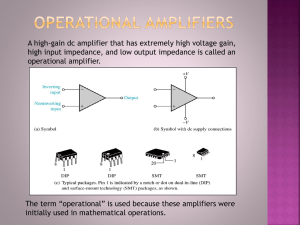
Physics 3330 Experiment #5 Fall 1999 Virtual Ground Amplifiers Purpose As their name implies, operational amplifiers can be used to implement a variety of simple mathematical operations such as integration, differentiation, summing, and differencing. These operations are produced most simply with an op-amp connected in the inverting or virtual ground configuration, rather than in the non-inverting configuration that was used in Experiment #4. The non-inverting configuration has the advantage of high input impedance, but the inverting connection is much more flexible. In this experiment you will first construct and test an inverting amplifier. Then you will build an integrator, and use it to make a simple magnetometer. Introduction VIRTUAL GROUND AMPLIFIER The basic inverting configuration is shown in Figure 5.1. Since the positive input is grounded, the op-amp will do everything it can to keep the negative input at ground as well. In the limit of infinite open loop gain the point S is a virtual ground, a circuit node that will stay at ground as long as the circuit is working, even though it RF is not directly connected to ground. Since R S Vin the op-amp inputs draw no current, it follows that +15 V Vin R = − V out RF – 356 + and the dc closed loop gain is V R G0 = out = − F . Vin R –15 V 0V A formula for the closed loop gain when the open loop gain is not infinite is given in the Theory section, along with a discussion of the input and output impedance. Experiment #5 Vout Figure 5.1 Inverting Amplifier 5.1 Fall 1999 INTEGRATOR R Vin S CF +15 V – 356 Vout + –15 V 0V Field Coil Figure 5.2 Integrator An excellent integrator can be constructed by replacing the feedback resistor RF by a capacitor CF , as in Figure 5.2. The input current Vin/R must flow into the capacitor, so that the rate of change of the output voltage is proportional to the input voltage: Vin dV = −CF out , R dt t −1 V out = V ( t ) dt. RCF ∫ in 0 The output voltage is proportional to the time integral of the input. MEASUREMENT OF MAGNETIC FIELD The strength of a magnetic field can be determined from the EMF induced across a coil when it is removed from the field. The integral of the EMF, obtained with an integrating amplifier, gives the total flux change through the coil. The B field can then be inferred if we know the area and number of turns in the coil. When you remove the field coil from the B-field to a zero field region, the total flux change is ∆φ = BAN , where A is the coil area and N is the number of turns. (The SI unit for flux is Webber=Tesla·m2=Volt·second.) While the coil is moving, there is an induced EMF ε given by Faraday's law: ε =− Experiment #5 dφ , dt 5.2 Fall 1999 ∞ ∆φ = − ∫ εdt. 0 The total flux change is equal to the time integral of the EMF. If the EMF is applied to the input of an integrator we have ∞ 1 1 BAN ∆Vout = − εdt = ∆φ = ∫ RCF RCF RC F 0 RF R RCF ∆Vout B= . AN Vin VS V – out A + Since everything in this formula can be easily measured, we can use the change of the output voltage ∆Vout to measure an unknown B-field. Figure 5.3 Inverting Amplifier Readings 1. D&H section 9.6 discusses the op-amp based integrator. H&H 4.26 discusses the the gain equation for the inverting amp, which is mostly reproduced below. 2. (Optional) More detailed discussions about op-amp based integrators can be found in H&H 4.26 and Bugg chapter 8. Theory The analysis of the virtual ground amplifier is very similar to the analysis of the non-inverting amplifier discussed in Experiment #4. The results are all similar, except for the input impedance, which is much lower in the inverting configuration. GAIN EQUATION The gain equation is discussed in H&H Section 4.26. We use the same definitions as for the noninverting case. The op-amp open loop gain is A, and the divider ratio B is given as before by R B= . R + RF The voltage VS at the negative input is related to Vout and Vin by Vin + B(Vout − V in ) = V S . But VS is also related to Vout by the open-loop gain: Vout = –AVS . Eliminating VS from these two equations gives the gain equation for an inverting amplifier V − A(1 − B) G = out = . V in 1+ AB (1) (This equation is misprinted on p. 235 of H&H.) The result is almost the same as for a nonExperiment #5 5.3 Fall 1999 inverting amplifier except for the sign and the factor (1–B) in the numerator. When the open loop gain is large (A>>1) we have G = 1 – 1/B = – RF /R. INPUT AND OUTPUT IMPEDANCE Formulas for the input and output impedance for an inverting amplifier are derived in H&H Section 4.26. When the open loop gain is large, the negative input of the op-amp is a virtual ground and so the input impedance is just equal to R. This is very different from the non-inverting case where the input impedance is proportional to A for large A. In practice, the input impedance of an inverting amplifier is not usually greater than about 100 kΩ, while the input impedance of a noninverting amplifier can easily be as large as 1012 Ω. When A is not large the formula for the input impedance is Zin = R + RF . 1+ A The formula for the output impedance is the same as for a noninverting amplifier: Ro′ = Ro / (1+ AB). FREQUENCY DEPENDENCE As for the non-inverting case, all of the above formulas are still correct when A and/or B depend on frequency. (To make B frequency dependent, R and/or RF may be replace by arbitrary impedances.) We again assume that the op-amp has dominant pole compensation: A0 A= f , 1+ i f0 (2) so that the relation between the open loop 3 dB frequency f0, the dc open loop gain A0 and the unity gain frequency fT is still f T = A0 f 0 . The frequency dependence of the closed loop gain G for the feedback amplifier can be found by substituting Equation (2) into Equation (1). The result is A0 (1− B ) (1 + A0 B) G0 G=− = f f . 1+ i 1+i f 0 (1 + A0 B) fB When B is frequency independent, the frequency response of the amplifier with feedback is again the same as an RC low-pass filter. The 3dB bandwidth fB with feedback is the same as for the non-inverting amplifier Experiment #5 f B = f 0 (1 + A0 B ). 5.4 Fall 1999 At frequencies well below fB the gain is A (1 − B ) G0 = − 0 . 1+ A0 B The gain-bandwidth product relation is A (1− B) G0 f B = − 0 ⋅ f 0 (1+ A0 B) = − A0 f 0 (1− B), 1 + A0 B G0 f B = − f T (1− B). This is the same (except for the sign) as the non-inverting result when the closed loop gain is large (B << 1, G0 >> 1), but at unity closed loop gain (B = 1/2, G0 = -1) the inverting amplifier has only half as much bandwidth as a non-inverting follower. Problems 1. Design of virtual ground voltage amplifier. Let the closed-loop gain G0 be -100. Select appropriate values for R and RF for the circuit of Figure 5.1. Choose RF large enough so that the maximum output current of the op-amp is not exceeded when the output voltage is near saturation. Predict the bandwidth and the input impedance at the signal input Vin. 2. Instead of the op-amp based integrator of figure 5.2 we could imagine an even simpler integrator which is simply a RC low pass filter with the same component values. What is the advantage of the op-amp based integrator over the one without the op-amp? Hint - the amount of time the simpler integrator acts “properly” is limited to very short times. Why is this so (it may be helpful for you to draw the response of the filter to a step input to see this), and why is this constraint essentially lifted for the op-amp integrator circuit? 3. Design of the flux coil. The test coil diameter should be somewhat less than that of the magnet poles (1 inch), so that a uniform region of B is sampled by the coil. A convenient size will be a coil diameter of 1 cm. Determine the number of turns for the flux coil, such that the time integral of the induced EMF when it is removed from a field of 1 Tesla is 10-3 Volt·sec. Why must you twist the long connecting wires together? What should be the initial orientation of the flux coil relative to the pole faces of the magnet? Experiment #5 5.5 Fall 1999 Field Coil +15 V S Signal 10 k CT Output Test R Vin CF R T1 Function Generator R T2 – 10 k 10-turn 100 k 100 Ω 356 + Vout 0.1 µF 0V 10 k –15 V Test and Calibration Zero Adjustment Integrator Figure 5.4 Circuit for measuring magnetic fields. 4. The simple integrator in Figure 5.2 needs to be modified to make a practical working system, as shown in Figure 5.4. The sensitive zero adjustment connected to the positive input permits precise cancellation of offsets that would otherwise drive the amplifier into saturation after a long time of integration. The op-amp power connections are not shown on the schematic, but they are required. Let the feedback capacitor CF be 1 µF. Chose R so that ∆Vout = 1 Volt for a 1 Tesla Bfield. Recall that the flux coil gives the integral ∫εdt = 10-3 Volt·sec when B = 1 Tesla. This makes the overall sensitivity 1 Volt per Tesla. The switch S parallel to CF is closed to discharge the capacitor before or after a measurement, but left open during the measurement . When calibrating a system with a known input signal, it is good practice to make the test signal mimic the real signal as closely as practical. We will design the test pulse to have a time width of about 0.2 s, since this is about how long it takes to remove the field coil from the magnet. You will drive the test network with a 1 V p-p square wave, as shown in Experiment #5 5.6 Fall 1999 figure 5.5a. This square wave will be differentiated by a RC high pass filter to obtain the calibration pulse of figure 5.5b. The pulse entering your op-amp integrator should be of quite small magnitude, which you will obtain by varying the ratio of RT1 and RT2. Calculate values for the components CT, R T1, and R T2 in the test network, so that the input to the integrator (5.5b) is characterized by the time constant τ1 = 0.2 s and ∫Vtestdt =Vo τ1 = 10-3 V·s. You will need to find formulas for both the time constant and the time integral in terms of the component values. Keep the output impedance of the test circuit divider much less than the input impedance of the integrator, and be sure that the value of CT is not unreasonably large (CT < 100 µF). a) Vtest 1 V p-p square wave b) Calibration pulse τ1 Vo Output of integrator c) Vout 0 τ1 Figure 5.5 Waveforms (y-scale is different for each graph) Experiment #5 5.7 Fall 1999 The Experiment 1. Test the theory of virtual ground feedback amplifiers by constructing an inverting voltage amplifier. Determine the gain, bandwidth and input impedance with a minimal set of measurements and compare with the results of problem 1. 2. Convert the amplifier to the voltage integrator that you have designed for use in the magnetometer. Adjust the 10-turn pot so the op-amp output is zero when the integrator input is grounded (Vin = 0). Test and calibrate the integrator with signals of amplitude and duration comparable to those you expect from the field coil. You will need to use a very slow scope sweep. Measure the constant in the relation, ∆Vout = (const.) ∫εdt, and compare with the predicted value, (const) = 1/RCF , obtained from the measured values of the components. If these two results for the calibration constant agree within expected uncertainty, one may go ahead to the magnetic measurements with reasonable confidence. 3. Build the flux coil to a size suitable to go between the poles of the electromagnet, measure the coil's dimensions, and then connect it to the input of your integrator. It is essential to twist the long connecting wires closely. 4. Hook cooling water up to the magnet and power it using the DC supply. The sheet attached to the manual can be used to get a rough idea of the amount of current needed for a certain field. (We have the .275” gap tapered solid magnet. Note whether the windings are hooked up in series or parallel). Use the Hall probe magnetometer to calibrate the actual field-current relationship of the magnet. You will first need to zero the Hall probe while in the supplied mu-metal shield inside of which there should be essentially zero magnetic field. You should also check your Hall probe by measuring the earth’s field, which should 4 have a magnitude of about 400 mgauss. Note that 1T=10 gauss. 5. Measure the B-field of the magnet using your op-amp integrating circuit for several values of magnet current, first smoothly increasing up to the maximum of about 1.0 A, then smoothly decreasing to zero. Compare your measured values with the information attached to the magnet and with measurements made with a Hall probe magnetometer. How accurate are your measurements of the magnetic field? Is there evidence for magnetic hysteresis? Experiment #5 5.8 Fall 1999