control system, operating modes, and communications for pogolite
advertisement

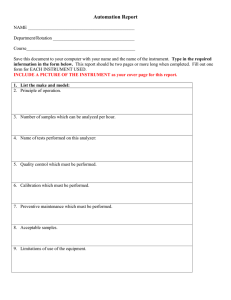
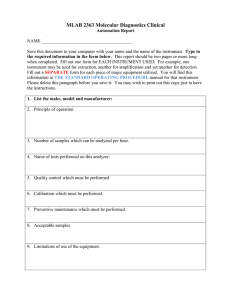
CONTROL SYSTEM, OPERATING MODES, AND COMMUNICATIONS FOR POGOLITE Miranda Jackson (for the PoGOLite Collaboration) KTH, Department of Physics and The Oskar Klein Centre for Cosmoparticle Physics, AlbaNova University Centre, 10691 Stockholm, Sweden. Email: miranda@particle.kth.se ABSTRACT PoGOLite is a balloon-borne high-energy X-ray polarimeter scheduled to be launched in the summer of 2011 from northern Sweden. The planned flight will have a circumpolar route and will last around 20 days. Because the payload will not be within the line of sight for most of the flight, satellite-based Iridium modems must be used. The low speed and reduced reliability of the connection require careful design regarding the operations and communications. The instrument has been made somewhat autonomous in function and has its own redundant storage. I describe the modes of operation, the communications, control, and thermal regulation systems, and the challenges encountered for a circumpolar flight. Key words: scientific balloons, X-rays, polarization. 1. INTRODUCTION Figure 1. Photograph of the polarimeter inside its pressure vessel, which is in turn inside the rotation frame. The instrument is surrounded by polyethylene blocks for passive shielding. The star trackers and the auroral monitor unit are attached to the assembly. The frame of the attitude control system can be seen in the background. The Polarized Gamma-ray Observer (PoGOLite) [1, 2] is a balloon-borne Compton-based polarimeter, with an energy range of 25–80 keV. In the pathfinder instrument to be flown in summer 2011, the detector system will employ 61 phoswich detector cells (PDC) and 30 side anticoincidence shield (SAS) detectors made of BGO material situated in an unbroken ring around the PDCs. The full size PoGOLite instrument will contain 217 PDCs. The polarimeter pressure vessel assembly is shown in Figure 1. The instrument is scheduled to be launched on its maiden flight in summer 2011 from the Esrange Space Center in northern Sweden. A circumpolar flight around the north pole is planned, and is expected to last 17–25 days. In addition to the polarimeter, a sophisticated pointing system known as the attitude control system (ACS), employing differential GPS, gyroscopes, magnetometers, and two star trackers, is employed. This system has been developed by DST CONTROL in Linköping, Sweden [3]. A flywheel is used to control pointing in the azimuthal direction, and a motor is used to control the elevation. To reduce systematic effects, the polarimeter is rotated around its axis one full turn during each observation. Figure 2. Photograph of the polarimeter attached to the attitude control system. _________________________________________________ Proc. ‘20th ESA Symposium on European Rocket and Balloon Programmes and Related Research’ Hyère, France, 22–26 May 2011 (ESA SP-700, October 2011) Figure 4. Diagram of a PDC, approximately to scale. Each of these units is about 1 m long. The slow scintillator is depicted in blue, the fast scintillator is red, and the bottom BGO is green. 2.2. Figure 3. The PoGOLite detector array, showing the 61 PDCs in the center, surrounded by 30 SAS units. From [4]. This negates the effect of different detector responses on the polarization measurement. A photograph of the polarimeter contained within the attitude control system is shown in Figure 2. 2. The signal from each PMT in the detector array is attached to one of eight channels on a flash analog to digital converter (FADC) board. There are twelve FADC boards in total. These boards provide control voltages for the PMTs and store waveforms from the PMT signals. They are also capable of some preanalysis, and issue triggers and hit signals as well as veto signals according to a set of predefined rules programmed into their FPGA chips. The signals issued by the FADC boards are received and processed by the digital input-output (DIO) board, which in turn issues a signal to the FADC boards to store the current waveforms in memory. The signals between the DIO and FADC boards are mediated by another electronics board which applies the required logic (AND/OR, etc.). The FADCs contain a limited amount of volatile memory and can each store 96 waveforms. To initiate data acquisition and store the waveforms more permanently, a SpaceWire to ethernet converter board is used, and this is controlled by an onboard PC104 running Linux. POGOLITE POLARIMETER HARDWARE 3. 2.1. Electronics Detector array The PoGOLite detector array is designed with passive shielding provided by a thick layer of polyethylene surrounding the pressure vessels. The detector array is contained within a pressure vessel, and consists of 61 PDCs and 30 SAS units. The array is shown in Figure 3. A diagram of a PDC unit is shown in Figure 4. Each PDC employs a tubular hexagonal plastic scintillator unit at the entrance to the detector, a solid plastic scintillator for detecting Compton and photoabsorption events, and a BGO crystal underneath. A specially designed low-noise photomultiplier tube (PMT) is attached to each BGO crystal in the detector array to absorb all the light produced by the three scintillators. The time constant of the middle plastic scintillator is much less than for the tubular or BGO scintillators, so interactions in the middle detector can be immediately distinguished by the electronics, and other events, including those from the SAS, can be immediately rejected. The resulting narrow field of view (∼ 5 square degrees) and low background make it ideal for observing astrophysical point sources. 3.1. GOALS FOR THE MAIDEN FLIGHT Polarimeter For the first flight, the intended primary targets are the Crab pulsar and nebula and Cygnus X-1, a high-mass X-ray binary system, which are the brightest objects in the PoGOLite energy range. A phase-resolved measurement of the polarization over the period of the Crab pulsar, as well as a measurement of the steady-state polarization from the Crab nebula, is desired. For this goal to be achieved, it is necessary for the timing resolution to be as small as possible, ideally 1 µs or less. For Cygnus X-1, a measurement of the polarization direction and degree and their evolution over time, if any, is sought. 3.2. Neutron detector A neutron detector [5] is situated within the detector pressure vessel, enclosed by the polyethylene shield, and it will measure the flux of <10 MeV neutrons, which are expected to constitute a large portion of the total background for the polarimeter. Figure 5. Diagram of the overall control hierarchy of PoGOLite. 3.3. Auroral monitor unit An auroral monitor unit (AMU) [6] will be attached to the instrument, and will measure the interaction of charged particles with the magnetic field of the earth. Because such interactions may produce polarized X-rays, this represents another source of background for the polarimeter [7], enhanced by the high latitude of the flight path. It is important to have an idea of the auroral contribution during the flight, though the measurement of the aurora is a scientific endeavour in itself. 3.4. Other goals In addition to the scientific goals, there are many other goals for the maiden flight. Two star trackers will be flown, one of which has been flown on balloons in the past, (the “slow” star tracker), and the other of which is of a new and untested design (the “fast” star tracker). The “slow” and “fast” designations are from the original intentions for the instruments; the actual cameras, computers, and software on the two trackers are virtually identical. However, the new star tracker is smaller and lighter, has a wider field of view, and requires a smaller baffle to block off-axis light. This flight will test the performance of the new tracker design. Many other hardware and software systems must be tested during the flight. For example, while the polarimeter detectors have been tested extensively in the controlled environment of an accelerator, this will be the first time that these detectors will be flown on a balloon, and it is necessary to test their performance and resilience. In addition, the control and pointing systems will be tested extensively. The lessons we learn from this flight will be used for future instruments and flights. 4. CONTROL STRUCTURE The main control system for the instrument and pointing system is known as the payload control unit (PCU). Figure 6. Diagram of the PCU and polarimeter systems. Blue lines denote ethernet connections, red denotes RS422 and RS485, green denotes SpaceWire connections, orange denotes LVDS, and black indicates other specialized types of connections and power connections. The 28V power connections and connections to the ACS are not shown. This system comprises computers and other electronics, and allows communication from the ground, performs autonomous functions, monitors the health of the systems, controls the pointing through the ACS, initiates data acquisition in the polarimeter, and stores polarimeter and housekeeping data. As shown in Figure 5, the PCU is connected to the ACS, the polarimeter, and one of the star trackers. The ACS in turn monitors the attitude of the gondola through differential GPS, gyroscopes, and a magnetometer, and controls various motors and monitors them by means of encoders. Fine pointing is provided by a connection to a second star tracker. The star tracker connected to the PCU serves as the backup for the one connected to the ACS. The constituents of and the connections within and from the PCU are shown in Figure 6. Three PC104s are used, two within the PCU enclosure, and one in an independent enclosure. See §8.3 for a thorough description of the functions of these computers. The purpose of the second enclosure is to provide extra redundancy should one of the enclosures be damaged during landing. The two PC104s inside the PCU are each connected to an Iridium modem, for communication while the payload is not within the line of sight of the launch facility (see §6). A small real-time computer provided by DST CONTROL, known as a module PC board (MPB), is controlled and monitored by the PC104, and is connected to the MPB in the ACS through a high-speed RS485 bus. An interface utility board (IUB), also connected to the MPB through the high-speed bus, is used to control power switches and to monitor temperatures and currents, etc. A second IUB performs similar functions in the PVA. Additional electronics boards provide switches and interfaces to the sensors in both the PCU and the PVA, and the board in the PVA also provides logic for the polarimeter electronics. The IUBs are also used to pass the PPS signal from the GPS into the polarimeter electronics. A DC/DC converter in the PCU provides 5V and 12V to the polarimeter. 5. MODES OF OPERATION Because the function of the instrument will be largely autonomous during the flight, it is convenient to use numeric modes which define procedures and functions of the instrument and pointing system. The modes are divided into those for the instrument and those for the attitude control system. Some of the modes on the two systems are linked. 5.1. Instrument modes The following modes are the instrument modes, which define the operations of the polarimeter, including the detectors, electronics, and related hardware: 5.1.1. “Power save” or “Do nothing” The purpose of this mode is to preserve battery power when the instrument does not have to perform any tasks. The instrument arrives in this mode when it is first powered and after a power failure. In this mode, all FADCs and PMTs are unpowered, and when the instrument is switched into this mode, the control voltages of the PMTs are ramped down and then the FADCs and PMTs are switched off. Other non-essential equipment such as the cooling system are also powered down. 5.1.4. The acquisition mode is reached by a simple transition from “ready” mode. When this mode is set, the instrument will already be pointed at the desired target and data acquisition will begin. At the same moment, the instrument starts rolling axially at a speed which will take it 360◦ in the acquisition time (usually 15 minutes). The instrument must be rolled during observation to remove the systematic effects from varying responses of the detectors. Once the acquisition finishes, the instrument returns to “initialize” mode in order that the FADCs can be rechecked and any parameters can be modified for the next data run. 5.2. Pointing system modes Like the polarimeter, the ACS also requires the use of modes. The following is a summary of the modes used by the pointing system: 5.2.1. “Initialize” “Initialize” When the acquisition mode is changed, the “initialize” mode determines which units are required and powers them on. The FADCs required for the target acquisition mode (usually all of them) are checked for proper functionality and the PMTs are ramped up to the appropriate predefined levels. Parameters such as trigger thresholds are read from the appropriate detector mode file and are set for each channel on each FADC. The ACS is initialized as needed as part of this mode, and instructed to point at a particular predefined target. The instrument is rolled to one of the end points (180◦ or −180◦ ) to prepare it for a 360◦ rotation through 0◦ . 5.1.3. “Startup” When the ACS is powered on, it is placed in this mode, indicating that none of the motors or encoders has been initialized. Before the ACS is capable of useful functions, it must be initialized in the next mode. 5.2.2. 5.1.2. “Acquisition” This mode operates each motor in turn from one extreme point to the other, checking and calibrating the encoders. The flywheel assembly, the elevation motor, and the rolling apparatus are initialized in this way. Various other systems, such as the GPS and magnetometer, are initialized and tested. 5.2.3. “Stow” and “Power save” The instrument is returned to vertical position and the locking magnets are applied. This is used for low power situations where the instrument will be powered down in order that the solar panels can recharge the batteries, or when pointing is otherwise not required. “Ready” After the initialization in the above “initialize” mode, the instrument arrives in ready mode. This mode is specific to the particular acquisition mode that has been requested, and changing the acquisition mode will cause the instrument to go back into ”initialize” mode to prepare for acquisition with the new parameters. 5.2.4. ‘Exercise” As the balloon rises through the atmosphere after launch, it will likely encounter layers of very cold temperatures, and it may be delayed in such a layer for an unpredictable amount of time. It is important that the motors are kept moving so that the lubricant is not given a chance to become adhesive or to solidify. The purpose of the “Exercise” mode is to keep the motors moving back and forth at a slow speed. 5.2.5. “Pointing” and “Tracking” These modes are used for fine pointing of the instrument for data acquisition. The GPS, magnetometers, and gyroscope are used to point the instrument, and one of the star trackers is used for fine control. With this system it is possible to keep the instrument pointed within 0◦ .1 of the target, which is well within the requirements, given the field of view [8]. 6. 6.1. COMMUNICATIONS AND CONTROL E-Link While within the line of sight of the launch facility, up to 500 km away, it will be possible to communicate with the instrument on a high-speed connection known as E-link [9]. Thus, it will be possible to control and monitor the instrument in real-time, and to download entire datasets at a speed of 1–3 Mbit/s, for analysis on the ground. The range of this connection may be extended with the use of the transmitting station at the Andøya rocket range in Norway. 6.2. Iridium Because the balloon will not be within the line of sight of the Esrange facility for most of the flight, a satellite-based Iridium Router Unrestricted Digital Information Connectivity Solution (RUDICS) [10] will be used for communications when E-Link is not possible. For this reason, a continuous connection cannot be maintained and many of the instrument operations must be autonomous. In addition, the bulk of the scientific data will not be downloaded to the ground until the end of the flight. A significant amount of preprocessing of the data will be performed onboard and the results will be sent to the ground, to ensure that the instrument works as expected and produces scientifically valid results. 6.3. Autonomous function and ground control Because the instrument and pointing system are required to work autonomously, a predefined set of modes and targets will be established before the flight. A variety of predictable errors and failures have been accounted for and will be automatically corrected. For example, the cooling system will automatically be activated when the components in the polarimeter reach a certain temperature. Polarimeter data will be automatically preanalysed, and small summary files as well as housekeeping data files concerning the data acquisition and instrument health will be available for transfer to the ground. The Iridium system will allow for checking every few minutes, so the instrument can be monitored at least once every acquisition run. When the available files are downloaded and examined, it will be clear whether any adjustments are needed to the equipment or instructions. Because the functions of the instrument are stored in the payload, there is no need to provide instructions unless something must be changed, and then it involves only uploading a single text file with the new instructions. 7. 7.1. THERMAL REGULATION Need for a cooling system The PMTs produce heat, which can raise the temperature of the detector system. The energy deposition from a low energy photon is small, and therefore the dark current must be kept to a minimum. Since the dark current increases with temperature, it is necessary to keep the PMTs at a preferably constant and uniform low temperature. If they are not cooled, the FADCs, which produce a total of over 100 W of heat, will overheat within a few minutes when enclosed in the pressure vessel. The FADCs must be kept well below 60◦ C to maintain optimal function. 7.2. Cooling system constituents and functions The instrument is cooled with the use of radiators mounted on the outside of the gondola. Paratherm LR [11] heat transfer fluid is pumped from the radiators and through the polarimeter pressure vessels. To remove heat from the vicinity of the PMTs, a cooling plate is installed through which the cold fluid flows. The fluid also flows through plates which hold the FADCs in place, and fans are used near the FADCs to circulate cool air throughout the area. The radiators are mounted at an angle so that the sun, which will be at a low elevation throughout the flight, will never shine directly onto them. Nevertheless, the targets and radiator placement must be chosen carefully before the flight to reduce the chance that the cooling system will be heated by the sun. A safeguard is in place that will stop the pump if the fluid entering the system from the radiators is too hot. In this event, the polarimeter electronics will be without cooling and must be shut down immediately. 8. 8.1. ADDITIONAL CHALLENGES Power use In the circumpolar gondola design, the solar panels are mounted in a skirt around the bottom of the gondola, and thus the sun will shine on at least one of them at any pointing angle. Because the flight will be above the arctic circle during the summer, the sun will be in the sky at all times. For the long duration flight, the batteries must be continuously charged so that there is enough power available for the instrument to function. It is possible that the instrument will occasionally need to be shut down for a few hours in order to replenish the batteries. The possibility to do this is provided by the “power save” modes in the various systems, and will allow the system to work for the entire flight. 8.2. Timing The timing challenges are not specific to the circumpolar flight, but since the balloon will be traveling a long distance, it is more of a challenge to store the coordinates at a given time in a precise way. As mentioned in § 3.1, it is important that the timing resolution be as small as possible, particularly for measurements of pulsars. Photon arrival times from pulsars must be shifted to an inertial frame of reference, such as the solar system barycenter. For this calculation to be performed accurately, the GPS coordinates, including altitude, must be measured to within a few metres. When the FADCs store waveforms, they base the stored timestamp on a clock within the FADCs themselves. Thus, the stored times have no concrete relation to the actual time. To match the times stored with the waveforms to actual times, a pulse per second (PPS) from the GPS system is used. PPS events are stored as empty waveforms in the FADCs, and the timestamps saved with these PPS events can be used to calibrate the times of the true polarimeter events. 8.3. are all destroyed in the parachute deployment and landing, it is likely that at least a few of the SSDs will survive and the data will be retrievable. Data storage Because the entirety of the polarimeter data will not be transferred to the ground during the flight, it is important that the data be stored as redundantly as possible. Three PC104s with industrial specifications are employed, one for the instrument control, one for preprocessing, and the third as an additional safeguard of the data. All of these computers will be able to function as controllers and preprocessors, should one be rendered inoperative. Each of the three PC104s has a RAID array of 4 solid state disks (SSD) and an additional SSD attached directly to the motherboard. This will allow six complete copies of the data to be stored onboard, and even if the computers 9. CONCLUSIONS A circumpolar flight will allow us to do much more science than in a shorter flight, but there is much more potential for minor failures and errors. Thus, it is imperative that all systems on PoGOLite be designed in a way which will allow autonomous operation with as many safeguards and redundancies as possible. The lessons learned from the maiden flight will be applied to future instruments and flights. We will know which equipment performed well and which has a tendency to fail under the harsh conditions at 40 km above the surface of the earth. We will also be able to construct a better plan for autonomous control and failure recovery, once it is more clear which types of failures are most likely. PoGOLite has a great potential to change the face of high energy astrophysics as we know it. Measurements of the polarization represent an entirely new dimension of knowledge for objects such as pulsars and black holes. REFERENCES [1] Kamae, T., et al. Astroparticle Physics 30 (2008) 72. [2] Pearce, M., these proceedings. [3] Strömberg, J.-E., these proceedings. [4] Kiss, M. (2011). Pre-Flight Development of the PoGOLite Pathfinder, KTH Doctoral thesis, Stockholm, Sweden, 113. [5] Takahashi, H., et al. A Thermal-Neutron Detector with a Phoswich System of LiCaAlF6 and BGO Crystal Scintillators onboard PoGOLite, 2010 IEEE NSS MIC Conference record, in press. [6] Jokiaho, O., et al. ESA-SP-671, ESAPAC Proceedings, Bad Reichenhall, Germany,195-200, 2009. [7] Larsson, S., et al., ESA-SP-647, ESAPAC Proceedings, Visby, Sweden, 513-516, 2007. [8] Marini Bettolo, C. (2010). Performance studies and star tracking for PoGOLite, KTH Doctoral thesis, Stockholm, Sweden, 139. [9] Jönsson, L.-O. ESA-SP-671, ESAPAC Proceedings, Bad Reichenhall, Germany, 215-218, 2009. [10] http://www.Iridium.com/products/RUDICS.aspx (accessed 26 May 2011). [11] http://www.paratherm.com/Paratherm-LR/LRheating-cooling-fluid.asp (accessed 26 May 2011).