Stepper motors made easy with AutoTune™ (Rev. A)
advertisement
")
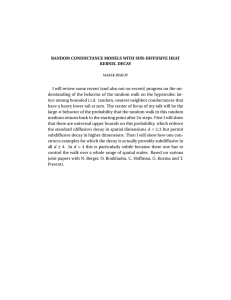
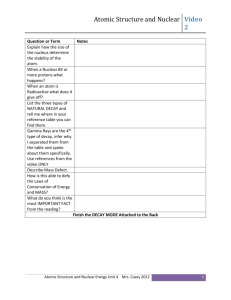
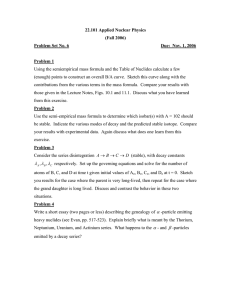
Stepper motors made easy with AutoTune™ Sudhir Nagaraj Design Engineer, Motor Drive Business Unit Texas Instruments An intelligent decay scheme continuously adapts to provide the best possible decay solution To handle re-circulation current in a current-chopping stepper motor drive, traditional decay schemes such as fast decay, slow decay and fixed-mixed decay fall short of optimal micro-stepping current regulation. End users often compromise certain micro-stepping performance parameters in order to achieve others. What if there was no compromise? This white paper introduces an intelligent decay scheme that continuously adapts to provide the best possible decay solution according to demands. This feature can now be integrated into a motor driver integrated circuit (IC) eliminating the need for the end user to tune the motor. Stepper motor: A brief overview Stepper motors are ubiquitous. They are used in a wide range of applications from robots, printers, industrial position control, projectors, cameras and so many more. A stepper motor typically has two electrical windings. An H-bridge is used to drive each winding. Motor position is controlled by regulating the current in motor windings. For a smooth motor motion profile and finer position control, micro-stepping is desired. While micro-stepping, the current Figure 1: Sine and cosine functions of micro-stepping in these windings is regulated in a sine (red) and cosine (blue) function (Figure 1). Each step corresponds to a preset current level. Having a non-optimal decay scheme does not allow for good micro-stepping, which translates to poor motor position control. xVM What is decay? Decay is defined as re-circulation current in the drive switches and diodes once the drive is interrupted, which is common in a pulse-width modulation (PWM) current regulation/chopping technique. The drive current typically is interrupted once the chopping current threshold is achieved. To handle this decay current, the H-bridge can operate in two different states: fast 1 1 Drive Current 2 Fast Decay 3 Slow Decay xOUT2 xOUT1 2 decay and slow decay. Mixed decay, a combination of fast and slow decay, is also employed. These states are shown in 3 Figure 2 for a positive current flow. Figure 2: Sine and cosine functions of micro-stepping Stepper motors made easy with AutoTune™ 2 March 2016 A typical PWM cycle and sequence of events in time is depicted in Figure 3. The various decay modes from this figure are described below In slow decay, current is re-circulated using both low-side FETs. However, the slow rate of current decrease during winding limits some current levels being regulated. In fast decay, the H-bridge reverses the voltage across the winding. This decreases the current at a much faster rate. The limitation with fast decay is that the current charge and discharge rates are Figure 3: Current waveforms in slow, fast and mixed decay modes similar; thus, the ripple current can be huge. This leads to inefficiency and limits some current levels compromises when choosing the best scheme, that can be regulated. such as: Mixed decay is a combination of slow and fast • Optimizing for quick-step rate (by setting a decay. It begins with fast decay and after a fixed higher mixed-decay percent) leads to excessive time, switches to slow decay mode. Fixed-mixed ripple in current regulation (while holding in decay also has its limitations. A percentage of PWM a step). cycle or a combination of slow and fast decay • Decay scheme for a fresh battery may not be needs to be optimized for a given motor, stepping the same for a battery declining in power. rate, magnitude of load current and supply voltage. • Optimal decay schemes differ greatly when Lower load current levels typically need a different handling current close to zero when compared percentage mix compared to higher current levels. to handling current at peak. Problem statement • An aggressive decay setting (higher percent of There are several limitations of conventional fixed- fast decay in the mixed-decay cycle) chosen to decay schemes (slow, fast and mixed decay). One is counter back electromotive force (BEMF) effects the inability to precisely regulate current, which limits causes excess ripple while regulating current in micro-stepping resolutions. Conventional fixed- most steps. decay also needs to be tuned by the user to identify • Initial tuned decay may not be good for a the most favorable setting. Finally, fixed-decay does resistive, end-of-life motor. not adjust to varying parameters such as supply When searching for improvement in handling decay voltage, load current, back electromotive force current, carefully analyzing the limitations can bring (BEMF) and rate of micro-stepping. about questions. Can we have different decay The best scheme is often chosen by cycling through schemes for different levels of micro-stepping the available fixed-decay options while observing current? Can we separate the decay approach for current on the oscilloscope. current regulation and step change? Can the decay This is time-consuming and still leads to scheme change as a response to changing loads, varying supply voltage and changing BEMF? Let’s find out. Stepper motors made easy with AutoTune™ 3 March 2016 Problem solution The answers to these questions are yes, yes and yes. The proposed solution addresses two main requirements. The first is to identify the best possible decay for a given level of current regulation for a given step. In this approach, during current regulation, the controller keeps track of where Itrip (the signal when coil current reaches target current) happens in a given PWM cycle. It Figure 4: The DRV8846 has a noise advantage of 16.5% lower than the nearest competition recalls from memory the ‘Itrip event and timing’ The AutoTune decay scheme self-adjusts to changing: from the previous cycle, and then dynamically a. supply voltage decides what decay action is needed for the b. load inductance current cycle. c. load resistance The second is to provide a quick transition from one d. rate of stepping BEMF in a stepper motor step to another. As a response to step command, e. magnitude of current to be regulated (torque). scaling up the percentage of fast decay allows us This is all offered without sacrificing ripple and step to aggressively reach a new level in a shorter time, performance. As an example, Figure 5 shows thereby providing a quick-step response. a current waveform without employing adaptive This solution is incorporated into a stepper motor decay. The distortion due to BEMF is eliminated by driver, such as the DRV8846, or AutoTune . It is an AutoTune. Figure 6 shows the current waveform all-inclusive digital scheme with no tuning required when AutoTune is engaged. TM by the user. The solution gives the optimal decay setting in any given situation. This decay setting is modified in real time to changing parameters such as current level, step change, supply, BEMF and load. Advantages Figure 5: Shows loss of current regulation in the presence of BEMF There are several advantages to this approach. No tuning is required in an adaptive decay scheme. Also, smaller ripple makes the average current more accurate to the desired step current in peak current detect regulation. This enables higher levels of micro-stepping, leading to smoother motion for the stepper motor. Smaller ripple also reduces noise in the motor and drive electronics, shown in Figure 4. Figure 6: This chart shows how a stepper motor with adaptive decay tames BEMF Stepper motors made easy with AutoTune™ 4 March 2016 This scheme saves device pins that set traditional fixed decay, which reduces system cost. This scheme also enables quicker step transition or response time, (Figure 7, right plot) than most conventional decay modes (left plot), without Figure 9: Fixed slow decay mode versus AutoTune on TI’s DRV8846 causing excessive ripple in current regulation while holding a step between adjacent steps. This Low-current regulation (near zero crossing of example provides around a three-times faster step micro-stepping sine) performance is improved with response time. this adaptive decay scheme. This is because the adaptive decay scheme enables low ripple at lower currents similar to slow decay. However, it does not cause loss of regulation like slow decay does. Slow decay causes loss of regulation because the Figure 7: caption rewrite: A 600uS step transition in fixed decay vs 200 uS transition in AutoTune adaptive decay mode amount of current built up during the minimum ON time is greater than the amount of current reduced Using slow decay cycles wherever possible makes by slow decay. Slow decay happens due to voltage an adaptive decay scheme more power-efficient. drop in the current path/loop. The lower the loop This is because slow decay minimizes switching current, the smaller the voltage drop. Hence, the losses and is typically done using low-side FETs that smaller amounts of current decayed. are more power-efficient. In the plots in Figure 8, blue is the current in the coil being Conclusion regulated. Pink and yellow are the H-bridge output An adaptive decay scheme, like TI’s AutoTune, voltage waveforms showing output switching. Pink promises to be the future of decay in motor current spikes indicate reverse FET voltage for fast/mixed regulation. This plug-and-play solution enables decay. The plot to the right employs AutoTune, TI’s greater current regulation and micro-stepping adaptive decay feature. It uses fast/mixed decay performance. The intelligent solution keeps track sparingly compared to the fixed-mixed decay case and adjusts decay for varying supply voltages, shown in the left plot. This makes using AutoTune load currents, load inductance BEMF, and motor power efficient. variations over operating lifetime, ensuring the optimal decay for any given situation. Power efficiency improvement is another key benefit. Higher performance that does not need tuning enables quicker time-to-market. Users no longer need to be concerned about having to tackle decay on their way to spinning a motor successfully. Figure 8: Fixed mixed decay versus AutoTune Stepper motors made easy with AutoTune™ 5 March 2016 References 1. DRV8846 product folder 2. DRV8880 product folder 3. Current Recirculation and Decay Modes Application Report 4. More information about motor drivers Important Notice: The products and services of Texas Instruments Incorporated and its subsidiaries described herein are sold subject to TI’s standard terms and conditions of sale. Customers are advised to obtain the most current and complete information about TI products and services before placing orders. TI assumes no liability for applications assistance, customer’s applications or product designs, software performance, or infringement of patents. The publication of information regarding any other company’s products or services does not constitute TI’s approval, warranty or endorsement thereof. The platform bar is a trademark of Texas Instruments. All other trademarks are the property of their respective owners. © 2016 Texas Instruments Incorporated Printed in the U.S.A. Stepper motors made easy with AutoTune™ SLYY066A 6 March 2016 IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other changes to its semiconductor products and services per JESD46, latest issue, and to discontinue any product or service per JESD48, latest issue. Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily performed. TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI. Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional restrictions. Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements. Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use of any TI components in safety-critical applications. In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and requirements. Nonetheless, such components are subject to these terms. No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties have executed a special agreement specifically governing such use. Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI has specifically designated certain components as meeting ISO/TS16949 requirements, mainly for automotive use. In any case of use of non-designated products, TI will not be responsible for any failure to meet ISO/TS16949. Products Applications Audio www.ti.com/audio Automotive and Transportation www.ti.com/automotive Amplifiers amplifier.ti.com Communications and Telecom www.ti.com/communications Data Converters dataconverter.ti.com Computers and Peripherals www.ti.com/computers DLP® Products www.dlp.com Consumer Electronics www.ti.com/consumer-apps DSP dsp.ti.com Energy and Lighting www.ti.com/energy Clocks and Timers www.ti.com/clocks Industrial www.ti.com/industrial Interface interface.ti.com Medical www.ti.com/medical Logic logic.ti.com Security www.ti.com/security Power Mgmt power.ti.com Space, Avionics and Defense www.ti.com/space-avionics-defense Microcontrollers microcontroller.ti.com Video and Imaging www.ti.com/video RFID www.ti-rfid.com OMAP Applications Processors www.ti.com/omap TI E2E Community e2e.ti.com Wireless Connectivity www.ti.com/wirelessconnectivity Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265 Copyright © 2016, Texas Instruments Incorporated