Currents` Physical Components theory implementation in shunt
advertisement

XI International School on Nonsinusoidal Currents and compensation, ISNCC 2013, Zielona Gora, Poland
Currents’ Physical Components theory
implementation in shunt active power filtering
for unbalanced loads
Mihaela Popescu, A. Bitoleanu, V. Suru;
University of Craiova, Faculty of Electrical Engineering, Craiova, Romania, mpopescu@em.ucv.ro
Abstract — This paper is focused on the implementation of
the Currents’ Physical Components power theory in the
control of a three-phase three wire shunt active power
filtering system. Various compensation objectives are taken
into consideration by using the provided orthogonal
decomposition of the load current associated to the power
phenomena. The control algorithms were implemented
through the dSPACE DS1103 controller board for modern
rapid prototyping which is fully programmable from the
Simulink block diagram environment. Three types of
unbalanced loads were taken into consideration in the
experimental investigations in order to be compensated,
namely an AC voltage controller, an unbalanced fullycontrolled bridge rectifier and a transformer with
unbalanced resistive load. The active filtering performance,
in terms of harmonic distortion factor, unbalance factor,
global power factor and displacement power factor, are
analysed for each laboratory test. The experimental results
prove that the control algorithm implementation on the
developed dSPACE platform enables achieving all
compensation objectives.
Keywords — Shunt active power filter, CPC power theory,
DSPACE 1103.
I. INTRODUCTION
The active power filtering is a well-known efficient
solution and powerful tool for power quality
improvement, mainly due to its versatility and capability
to achieve different compensation goals.
When connected in parallel with the load to be
compensated, the shunt active power filter (SAPF) must
be able to provide an appropriate compensating current in
the point of common coupling (PCC), in order to meet the
desired objective, such as the current harmonic
cancelling, the reactive power compensation, the current
unbalance compensation or the total compensation.
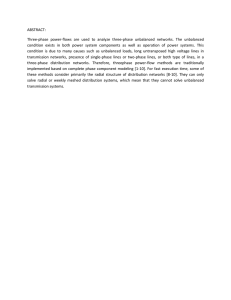
In the SAPF’s practical implementation by using a
voltage source inverter connected to PCC through a
passive interface filter (Fig. 1), the control system must
have the ability to provide the accurate tracking of the
calculated compensating current and to keep the DC
voltage at its prescribed value.
There are many theories applied in the generation of
SAPFs’ reference compensating current, based on either
time-domain or frequency-domain.
One of the most popular theories in the time domain is
the so called p-q theory of the instantaneous reactive
power introduced in 1983 for three-phase three-wire
circuits under sinusoidal voltage conditions [1] and
subsequently extended and applied in shunt active
filtering systems [2-4]. However, some deficiencies have
been
highlighted,
especially
concerning
the
interpretations of power related phenomena [5], [6].
Other relevant theories, such as the Fryze-BuchholzDepenbrock (FBD) theory [7] and the generalized
instantaneous reactive power theory [8], are based on
Fryze’s idea and provide the fundamentals for calculation
the reference supply current when the global
compensation is desired.
Among the frequency based approaches, the Currents’
Physical Components (CPC) power theory formulated by
professor Czarnecki for three-phase asymmetrical circuits
under sinusoidal and nonsinusoidal voltage conditions is
able to give the physical interpretation of power
phenomena [5], [6], [9], [10], [15-17]. Through the
provided orthogonal decomposition of the load current,
any useless individual component of the current or set of
components can be taken into consideration in order to be
compensated. Thus, the CPC theory can be used as a
fundamental for reference compensating current
calculation in SAPFs. The term of “programmable
compensation” is used in [10] to refer to the individual
management of the major components of the detrimental
current. In [11], a flexible control is proposed with
respect to the compensation targets. The experimental
investigation conducted in [12] shows that the
implementation of the CPC theory enables obtaining
nearly sinusoidal supply current even under
nonsinusoidal voltage conditions. However, as the
frequency-domain approach involves the computational
burden Fourier decomposition of the currents and/or
voltages, there are few such implementations compared
to those in the time-domain.
u
is PCC
Power
supply
iL
iL
iF
Coupling
filter
uDC
VSI
C
SAPF
u
uDC u*DC
Reference
compensating
current calculation
i*Fc
Nonlinear
load
DC Voltage
control
*
i Fu
+
*
iF
Compensation
current control
+
Gating signals
generation
CONTROL SYSTEM
Fig. 1. Block diagram of the SAPF system.
iF
XI International School on Nonsinusoidal Currents and compensation, ISNCC 2013, Zielona Gora, Poland
The subsequent discussion in this paper is directed to
the implementation of the CPC theory in a SAPF system
through an experimental setup based on dSPACE
DS1103 controller board. Thus, the description of the
control system in section II is followed by the
presentation of the reference compensating current
calculation under nonideal voltage conditions based on
CPC theory concepts. After introducing the experimental
setup in the next section, the experimental results show
the capability of the compensating system to meet various
objectives of compensation. The main conclusions are
summarized at the end of the paper.
II. DESCRIPTION OF THE SAPF CONTROL SYSTEM
As shown in the single-line block diagram of the
adopted SAPF system (Fig. 1), the sensed voltages
(power supply and DC-side) and currents (load-side and
VSI output), together with the prescribed DC voltage, are
the five inputs of the control system. Actually, the threephase three-wire system involves to measure two line-toline voltages and two line currents at every acquisition
point.
The reference compensating current calculation
(RCCC) block implements the CPC theory concepts and
provides the current (i*Fc) to be drawn from PCC
according to the compensation objective. Since the
filtering system operation is conditioned by keeping the
DC voltage at its set value, an additional reference
current (i*Fu) is generated by the voltage control block. It
must be noticed that a proportional integral (PI) controller
has been chosen and designed to provide the magnitude
of this current, whereas a specific phase-locked loop
(PLL) circuit provides its shape and fundamental angular
frequency (ω1) [13], [14].
A hysteresis-band controller is used to ensure the
accurate tracking of the whole reference current (i*F).
The real-time control system was implemented on a
dSPACE 1103 platform by making use of the
Matlab/Simulink environment combined with the RealTime Interface and Real-Time Workshop tools. As it can
be seen in the compiled Simulink model of the control
system, the input signals are received through the analog
to digital (ADC) blocks and the generated IGBTs’ gate
signals are transferred through the digital I/O channels
(Fig. 2). In addition, the control system takes into
consideration the start-up process and the required
protections.
III. COMPENSATING CURRENT CALCULATION
In accordance with the CPC theory, the three-phase
current vector (iL) of any unbalanced and nonlinear load
in a three-wire circuit supplied by a symmetrical
sinusoidal voltage system can be decomposed into four
orthogonal components, as follows [9]:
i L = [i A i B iC ]T = i a + i r + i u + i g ,
(1)
where the active component (ia) is responsible for active
power transmission, the reactive component (ir) is
associated to the reciprocating flow of energy, the
unbalanced component (iu) is related to the load
imbalance and the load generated component (iq) is
associated to the load nonlinearity or its parameters’
time-variance.
As the supply voltage is sinusoidal, the three-phase
voltage vector is written as a function of the complex rms
voltages (UA, UB and UC),
{
}
u = [u A u B u C ]T = 2 Re [U A U B U C ]T e jω1t =
,
(2)
= 2 Re Ue
and the current components, except the generated current,
are included in the current fundamental harmonic, i.e.
i L1 = i a + i r + i u ;
(3)
{
ig =
jω1t
}
∞
∑i
Lk
;
(4)
k =2
i L = i L1 +
∞
∑i
Lk
.
(5)
k =2
By considering the equivalent passive load of delta
structure, with respect to active and reactive powers,
whose equivalent admittance is Ye = Ge + jBe , the
current components can be expressed as follows [5], [6],
[15]:
{
}
2 Re{jB Ue };
2 Re{A[U U U
i a = 2 Re GeUe jω1t ;
ir =
iu =
(6)
jω1t
e
A
C
B
]
T
e
jω1t
}.
(7)
(8)
Starting from the general definitions of the equivalent
admittance (Ye) and unbalanced admittance (A),
Ye = Y AB + Y BC + YCA ,
(9)
(
)
A = − Y BC + αYCA + α* Y AB ,
j 2π 3
*
(10)
− j 2π 3
α=e
,
α =e
,
(11)
convenient fictitious line-to-line admittances of the load
can be expressed in the three-wire system in order to
reduce the amount of calculation [16], [17].
As the measured line-to-line voltages in the
experimental setup are uBA and uCA, the phase-A is chosen
as a reference and YBC is assumed to be zero. Therefore,
the expressions of the equivalent and unbalanced
admittances become:
Ye = Y BA + YCA =
Fig. 2. Compiled Simulink model of the control system.
IB
I
+ C .
U BA U CA
(12)
XI International School on Nonsinusoidal Currents and compensation, ISNCC 2013, Zielona Gora, Poland
(
)
⎛ I
I ⎞
A = − αYCA + α* Y BA = −⎜⎜ α C + α* B ⎟⎟ .
(13)
U BA ⎠
⎝ U CA
Then,the equivalent conductance (Ge) and susceptance
Be) of the load are calculated as:
Ge = Re{Ye } ;
Be = Im{Ye } .
(14)
In the general structure of block RCCC (Fig. 3), the
block B1 is mainly aimed to calculate the complex rms
values of the fundamental components of the line-to-line
nonideal voltages and line load currents based on Fourier
transformation. The load generated component of the
current to be compensated is calculated too, either as
i *g = i L − i L1 ,
(15)
when perfect harmonic cancellation is desired, or as
i *g =
N
∑i
Lk
,
(16)
k =2
when current harmonics of orders from 2 to N are to be
removed.
Then, the fundamental equivalent conductance,
susceptance and unbalanced admittance are calculated in
block B2 and supplied to bloc B3 in order to generate the
fundamental active, reactive and unbalanced components
of the current. Obviously, the calculation of the reference
compensating current in block B4 depends on the
compensation goal. Either the sum of current components
to be removed through compensation or the subtraction of
the desired supply current from the load current can be
used to express iFc*.
IV. EXPERIMENTAL SETUP AND RESULTS
In the experimental setup (Fig. 4), the VSI of 15 kVA
rated power consists of a IGBTs three-legs bridge with a
DC-capacitor of 1100 µF, which is coupled to PCC
through an inductive filter of 4.4 mH.
By imposing a hysteresis band of 0.4 A in the current
control, the switching frequency was kept below the
IGBTs’ capability. The imposed DC-voltage value was
set to 700 V during all experiments.
To execute the MATLAB/Simulink generated C-codes
in real time, a minimum sampling time of 20 μs is
required.
The three-phase symmetrical nonideal voltage system
has a total harmonic distortion factor (THD) of about 1.75
% , the fundamental line-to-line value is 380 V rms and
the fundamental frequency is 50 Hz.
Several experimental test cases were conducted to
achieve different compensation goals. The results
presented below are related to the following types of
three-phase unbalanced loads:
- an AC voltage controller especially aimed for testing
which is manufactured by Nokian Capacitors Ltd.;
- an unbalanced controlled thyristor-bridge rectifier
(CTBR) with resistive–inductive (RL) load;
- a transformer with resistive load supplied between two
phases.
The level of current unbalance is quantified by the
current unbalance factor (UF) according to the IEC
definition, which is the ratio of magnitudes of negative
( I1n ) and positive ( I1p ) fundamental sequence
components of the current, i.e.
UF =
I1n
⋅100 ,
(17)
I1p
The harmonic suppression performance is assessed by
the partial harmonic distortion factor (PHD) which takes
in consideration the current harmonics up to order 51,
51
∑I
PHD =
k =2
I1
2
k
.
(18)
The average harmonic distortion is:
PHD A + PHDB + PHDC
.
(19)
3
The three-phase rms value of the line currents is
calculated as:
PHDe =
I e = I A2 + I B2 + I C2 .
Fig. 3. Block diagram of the compensating current calculation.
Fig. 4. Picture of laboratory setup of SAPF.
(20)
The global power factor (PF) and the displacement
power factor (DPF) at both load and supply sides are also
taken into consideration.
The compensation results are summarized in Tables I
and II.
A. Test 1. Compensation of harmonics and
unbalanced current generated by an AC voltage
controller
The unbalanced system of load currents shown in Fig.
5 has different levels of distortion on the three lines (95.5
% for line-A, 102.3 % for line-B and 91.6 % for line-C)
(Fig. 6) and the average harmonic distortion factor is high
(about 96.4 %). The calculated unbalance factor is 20.1 %
(Table I).
The current components in Fig. 7 according to CPC
iLA1r
iLA1u
iLA
iLA1a
iLAg
Time (s)
Fig. 7. Components of line-A current drawn by the AC voltage
controller.
i*FA, iFA (A)
(a)
Time (s)
DC-voltages (V)
(b)
Time (s)
Fig. 8. SAPF’s tracking performance in the case of test 1:VSI’s output
current (a) and DC-voltage (b).
uB isB uC isC
Supply voltages (V)
uA isA
Supply currents (A)
Time (s)
Fig. 9. Supply voltages and currents after compensation in the case of
test 1.
Time (s)
Fig. 5. Supply voltages and load currents drawn by the AC voltage
controller.
Harmonic order
Fig. 6. Harmonic spectra of the line currents drawn by the AC voltage
controller.
Load currents (A)
ILAk (A)
ILBk (A)
ILCk (A)
uA iLA
uB iLB uC iLC
Supply voltages (V)
uB iLB uC iLC
Load currents (A)
uA iLA
Supply voltages (V)
theory reveal a low magnitude of the active current,
which is of about 24 times smaller than the magnitude of
the reactive current. The rms value of the harmonic load
generated current is close to that of the reactive current
and the unbalanced rms current is of about five times
lower.
When SAPF is charged to compensate both the load
unbalance and load generated harmonics, the DC-voltage
and the reference compensating current are accurately
tracked (Fig. 8) and the resulting balanced supply
currents contain, besides the active and reactive
components, the high order harmonics due to the IGBTs’
switching (Fig. 9).
Although the three-phase rms value of the line currents
diminished by about 28 %, the active power at the supply
side was increased by the component required by the
SAPF operation.
The unbalance level is reduced to 1.1 %. The active
filtering efficiency, in terms of ratio of average harmonic
distortion factors at the load and supply sides, is of about
27.3.
Obviously, the currents lag the voltages, as the reactive
current component is not compensated. Nevertheless, the
global and displacement power factors are over three
times greater after compensation (Table II).
B. Test 2. Compensation of harmonics and
unbalanced current generated by an unbalanced CTBR
The second nonlinear load taken into consideration to
be compensated is a three-phase controlled thyristorbridge rectifier with resistive–inductive load on the DC
side. When a resistor is connected in series in one line of
the transformer secondary, the system of currents drawn
from the power supply is unbalanced, as shown in Fig.
10. The rms line currents are 12.5 A, 16.5 A, and 14.6 A,
respectively. The unbalance factor on the fundamental
current is 7.22 % (Table I).
Load current components (A)
XI International School on Nonsinusoidal Currents and compensation, ISNCC 2013, Zielona Gora, Poland
Time (s)
Fig. 10. Supply voltages and load currents drawn by the unbalanced
rectifier.
XI International School on Nonsinusoidal Currents and compensation, ISNCC 2013, Zielona Gora, Poland
iLA
iLC
iLB
Time (s)
Fig. 13. Supply voltage on phase A and unbalanced currents drawn by
the unbalanced transformer.
ILAk / ILA1 (%)
ILBk / ILB1 (%)
ILCk / ILC1 (%)
Harmonic order
Fig. 14. Harmonic spectra of the line currents drawn by the unbalanced
transformer.
(a)
i*FA, iFA (A)
ILAk (A)
ILBk (A)
ILCk (A)
uA
Supply voltage (V)
C. Test 3. Compensation of unbalanced and reactive
currents generated by a transformer with unbalanced
resistive load
This time, a star-star three-phase transformer, with
single-phase resistive load between the phases A and C of
the secondary, acts as the nonlinear load to be
compensated.
Although the current harmonic distortion in the
primary lines A and C of the transformer is low (2.3 %
and 3.4 %), the low idle current flowing in line B is
highly distorted (PHD =40 %), as shown in Fig. 13 and
Table I.
As it can be seen in Fig. 14, the weight of harmonics
from order 2 to order 5 is significant.
Through an appropriate compensating current (Fig.
15a), SAPF succeeds in significant reducing the
unbalance factor (from 96.7 % to 11.3 %) and improving
the global power factor (from 0.713 to 0.9726). In the
same time, the displacement power factor at the supply
side is nearly unity and the average harmonic distortion is
2.5 times lower. It must be noticed the high filtering
efficiency in line-B, as PHD was decreased from 40 % to
6.2 % (Table I and Table II).
Load currents (A)
There are different harmonic spectra of the line
currents (Fig. 11) and the associated harmonic factors are
from 20.8 % in line-B to 27.4 in line-A (Table I).
By forcing the SAPF to track the calculated reference
current (Fig. 12a) in order to meet the same compensation
objective as in test 1, a nearly balanced and sinusoidal
system of supply currents is obtained, with a low average
harmonic distortion factor of 2.27 % (Fig. 12b).
The three-phase rms value of the line currents absorbed
from the power supply is almost equal to the load current,
but the power factor is increased with about 6%. The
active power at the supply side exceeds the load active
power by about 4 % to cover the losses in the active filter
circuit (Table II).
Harmonic order
Fig. 11. Harmonic spectra of the line currents drawn by the unbalanced
rectifier.
(b)
Supply voltages (V)
uB iLB uC iLC
Supply currents (A)
(a)
i*FA, iFA (A)
Time (s)
uA iLA
Time (s)
uB iLB
uC iLC
Supply currents (A)
(b)
Supply voltages (V)
uA iLA
Time (s)
Fig. 12. Experimental results (test 2): reference and actual current drawn
by VSI (a); voltages and currents after compensation (b).
Time (s)
Fig. 15. Experimental results (test 3): reference and actual current drawn
by VSI (a); voltages and supply currents after compensation (b).
TABLE I
SAPF’S MAIN QUANTITIES BEFORE AND AFTER COMPENSATION
ILA ILB ILC
Load (A) (A) (A)
Test 1 13.7 10.2 14.4
Test 2 12.5 16.5 14.6
Test 3 10.6 0.7 10.1
Load side
PL PHDLA PHDLB PHDLC
(W) (%) (%) (%)
165 95.5 102.3 91.6
7667 27.5 20.8 25.5
4050 2.3
40
3.4
UFL
(%)
0.0196 0.0273 20.1
0.7886 0.8138 7.22
0.713 0.714 96.7
PFL
DPFL
XI International School on Nonsinusoidal Currents and compensation, ISNCC 2013, Zielona Gora, Poland
ISA
(A)
Test 1 9.3
Test 2 14.5
Test 3 6.4
ISB
(A)
9.2
14
6.4
ISC
(A)
9.4
14.6
7.5
Supply side after compensation
PS PHDSA PHDSB PHDSC
PFS
(W) (%) (%) (%)
538.9 3.6
3.4
3.6 0.088
7966 2.2
2.3
2.3 0.8325
4422 6.6
6.2
5.5 0.9726
[2]
DPFS UFS
0.0898 1.1
0.8362 1.6
0.9938 11.3
[3]
[4]
TABLE II
SUMMARY OF THE COMPENSATION PERFORMANCES
PHDAVL /
DPFS /
PFS / PFL
UFL / UFS
ISeA/ILeA PS/PL
PHDAVS
DPFL
Test 1
0.72
3.27
27.3
4.49
3.29
18.27
Test 2
0.98
1.04
10.85
1.06
1.03
4.51
Test 3
0.80
1.09
2.50
1.36
1.39
8.56
VI. CONCLUSION
In this paper, the CPC power theory was applied in the
control of a three-phase three-wire SAPF system with
unbalanced and nonlinear loads. A dSPACE 1103 based
platform was used to implement the compensation
strategies in real time. Some concluding remarks can be
pointed out after the experimental investigations on three
types of unbalanced loads.
When the compensation objectives consist of removing
the load imbalance and harmonic distortion, CPC theory
leads to very good results. In particular, the ability of the
control system in meeting the compensation goal under
extremely unbalanced conditions is emphasized. Under
these conditions, from the authors’ experience, the
required computation time is comparable to that of other
methods of reference compensating current calculation,
such as p-q theory and Conservative Power theory.
The use of a low sampling time of 20 µs during all
experimental tests was favored by the very low distortion
level of the supply voltage, which allowed taking into
consideration only its fundamental component.
It is expected that, when the computation on voltage
harmonics is required, the processing time becomes
longer. It is also expected that, when the selective
suppression of the current harmonics is desired even
under sinusoidal voltage conditions, the increasing of the
computation time involve an increased sampling time. If
it is necessary to consider both the voltage harmonics and
selective current harmonic compensation, it is possible
that the unacceptable processing time or the overrun
errors require a more efficient hardware structure.
REFERENCES
[1]
H. Akagi, Y. Kanazawa, and A. Nabae, “Generalized Theory of
the Instantaneous Reactive Power in Three-Phase Circuits,” Int.
Power Electronics Conf., Tokyo, Japan, 1983, pp. 1375-1386.
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
H. Akagi and A. Nabae, “The p-q Theory in Three-Phase Systems
under Non-Sinusoidal Conditions,” Europ. Trans. on Electrical
Power, ETEP, vol. 3, no. 1, Jan. 1993, pp. 27-31.
H. Kim, F. Blaabjerg , B. Bak-Jensen, and J. Choi,” Instantaneous
power compensation in three-phase systems by using p-q-r
theory,” IEEE Trans. On Power Electronics, vol. 17, no. 5, Sept.
2002, pp. 701-710.
A. Bitoleanu and, Mihaela Popescu, “How can the IRP p-q
theory be applied for active filtering under nonsinusoidal voltage
operation?,” Przegląd Elektrot., vol. 2011, no. 1, 2011, pp. 6771.
L.S. Czarnecki, “On some misinterpretations of the Instantaneous
Reactive Power p-q Theory,” IEEE Trans. on Power Electronics,
vol. 19, no. 3, 2004, pp. 828-836.
L.S. Czarnecki, “Instantaneous Reactive Power p-q Theory and
Power Properties of Three-Phase Systems”, IEEE Trans. on
Power Delivery, vol. 21, no.1, Jan. 2006, pp. 362-367.
M. Depenbrock, “The FBD-method, a generally applicable tool
for analyzing power relations,” IEEE Trans. Power Systems, vol.
8, no. 2, 1993, pp. 381-387.
F.Z. Peng and J.S. Lai, “Generalized instantaneous reactive power
theory for three-phase power systems,” IEEE Trans. on Instrum.
Meas., vol. 45, no. 1, 1996, pp. 293–297.
L.S. Czamecki, “Orthogonal decomposition of the currents in a 3phase nonlinear asymmetrical circuit with a nonsinusoidal voltage
source,” IEEE Trans. on Instrum. Meas., vol. IM-37, Mar. 1988.
L.S. Czarnecki and S.E. Pearce, “Compensation Objectives and
CPC- based Generation of Reference Signals for Shunt Switching
Compensator Control,” IET on Power Electronics, vol.2, no.1,
Jan.2009, pp.33-41.
H.. Ginn and G.Chen, “Flexible Active Compensator Control for
Variable Compensation Objectives,” IEEE Trans. on Power
Electronics, vol. 23, no. 6, 2008, pp. 2931-2941.
A. Firlit, “Current’s physical components theory and p-q power
theory in the control of the three-phase shunt active power filter, “
Electrical Power Quality and Utilization Journal, vol. XIII, no.1,
2007, pp.59-66.
M. Popescu and A. Bitoleanu, “Control loops design and
harmonic distortion minimization in active filtering-based
compensation power systems,” Internat. Review Modelling and
Simulations, vol. 3, no. 4, 2010, pp. 581–589.
M. Popescu, A. Bitoleanu, V. Suru, and A. Patrascu “High
performance shunt active power filter,” Proc. 7th International
Symposium on Advanced Topics in Electrical Engineering ATEE,
Bucharest, Romania, 2011, pp. 1-6.
L.S. Czarnecki, “Harmonics and power phenomena, ” Wiley
Encyclopedia of Electrical and Electronics Engineering, John
Wiley & Sons, Inc., Supplement 1, 2000, pp. 195-218.
L.S. Czamecki,, “Power related phenomena in three-phase
unbalanced systems.” IEEE Trans. on Power Delivery, vol. 10,
no. 3, 1995, pp. 1168–1176.
L.S. Czamecki,, “Quasi-Instantaneous Generation of Reference
Signal for Hybrid Compensator Control,” Electrical Power
Quality and Utilization Journal, vol. XIII, no. 2, 2007, pp.33-38.