Track Management
advertisement

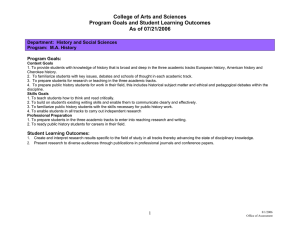
www.terma.com Track Management A component in the T-Core software complex Track Management The real-time capability of the T-core platform is centered around the Track Management (TM) component. The purpose of TM is to form a total situation picture based on the information received from all available sensors and data links. TM manages radar tracks, radar plots, jam strobes and EW-lines: • Radar tracks represent objects detected by connected radars. The radars assign reference number, position, speed, course, tracking quality and possibly other properties to the tracks. TM may get track input on the same physical object from different radars, in which case TM performs correlation of the tracks. Tracks that correlate are fused and all available information is assigned to the fused track. Track correlation can be performed automatically, manually or assisted by the operator. Correlation criteria are configurable. TM can also handle non-real time tracks, i.e. tracks that are initiated and updated manually. Radar 1 Radar 2 TM Radar 1 Airpicture Radar 2 Airpicture Correlated Airpicture Track correlation 1 • Radar plots represent single radar observations. A plot consists of a time stamped position and it is not correlated with other observations. Plots are saved for presentation in the situation display. TM can perform tracking when receiving plots from a radar without tracking capability. • Jam strobes are single radar observations without range and they are uncorrelated like plots. TM can perform triangulation when receiving crossing jam strobes on the same object from radars at different positions. Triangulation is automatic but initiation of triangulated tracks is manual. • EW-lines represent objects detected by Electronic Surveillance Measures (ESM) equipment. The ESM equipment assigns reference number, azimuth and possibly other properties to the EW-lines. TM can correlate EW-lines with tracks and it can perform triangulation when receiving crossing EW-lines on the same object from ESM equipments at different positions. TM can assign track numbers to the tracks or use the reference numbers assigned by the sensors. Tracks received from other C2 systems via data link can be correlated with the locally generated air picture and data link track numbers can be assigned to the tracks so they have the same reference at all C2 systems. www.terma.com TM makes it possible to present track history because System Specification old track positions can be saved. When no updates are • Operating Systems: received TM can perform prediction calculation of track o Windows positions, time-out of tracks, plots, jam strobes and EWlines and count down of track quality until time-out time. o Solaris A long time-out time of plots can be used to present echo o Linux trails. • Hardware Specifications: Each track belongs to one of the Link-16 categories: The T-Core framework is designed to be able to Space, Air, Surface, Subsurface and Ground and one of run on hardware ranging from ruggedized the Link-16 identifications: Friend, Hostile, Unknown, laptops and other portable devices to dedicated Neutral, Suspect, Assumed friend, Pending. TM is not servers and workstations. Specific hardware tied to the Link 16 values for category and identity, other specifications will depend on the system load values can be defined if so desired. In addition to etc. category and identification the track can have a number of attributes. The set of attributes differs for the different Environment categories. The TM component interacts with a few other Tracks of category Space are characterized by having a components. Radar input is received from radar control predetermined trajectory. TM calculates this trajectory components (RDR) and ESM input from ESM control and the associated Point of Origin, Point of Impact and components (ESM). The situation picture is delivered to Circular Error Probable. The calculations are refined for the human machine interface component (HMI) and every track update. operator controls of correlation, triangulation, termination, etc. is received from HMI. Tracks and EW Correlation criteria, triangulation criteria, time-out lines are exchanged with other C2 systems via tactical criteria, attributes, etc. differ for the different categories data link components (TDL). and for different sensors and they are easy to modify. Currently TM has been configured for Space, Air, Surface and Subsurface tracks and for a large number of sensor types. The attributes currently supported are those defined for Link-16. TM is a framework that can easily be configured to new types of sensors, data links and operational needs. TM is not tied to one central server. The architecture is distributed in order to ensure that there is no single point of failure. Interfaces Components in the T-Core framework offer the following interfaces: • • Java, RMI Sockets (TCP/UDP) TM interaction with other components Terma A/S Hovmarken 4 8520 Lystrup Denmark T: +45 8743 6000 www.terma.com 2