zarko.qxd
7.2.2006
15:16
Page 113
ISSN 0005–1144
ATKAAF 46(3–4), 113–122 (2005)
Damir @arko, Drago Ban, Ratko Klari}
Finite Element Approach to Calculation of Parameters of an
Interior Permanent Magnet Motor
UDK 621.313.82:519.6
IFAC 5.5.4
Original scientific paper
A method for calculation of parameters of an interior permanent magnet (IPM) motor at any operating point
using 2-D finite element method is presented. This approach is suited to be used in the design stage where it is
necessary to determine the motor parameters, namely inductances, which are simultaneously a function on motor
dimensions and terminal voltage constraints. An analytical technique based on a 3-D geometric model of the end
winding region in which each coil is modeled as a set of serially connected straight filaments has been used for
calculation of the end winding leakage inductance. The calculation of the mutual inductance of the end coils is
based on the multiple solutions of the Neumann integral. This approach to calculation of motor parameters has
been applied in the design of a 1.65 kW IPM motor for which a prototype has been built and tested.
Key words: permanent magnet motor, inductances, finite element method, simulation, testing
1 INTRODUCTION
Interior PM motors are attractive for applications
where operation in a wide speed range is required
(e.g. traction). Unlike surface PM motors which
have the same value of inductance in d and q axes
and where all the torque is produced by the magnet flux, interior PM motors have different d and q
inductances which results in an additional torque
component called reluctance torque. The fundamental torque equation can be derived from the phasor
diagram shown in Figure 1 and is given by
Tem
⎡
⎤
⎢
⎥
3
= p ⎢ Ψ md I qs − ( Lq − Ld ) I qs Ids ⎥ , Lq >Ld
⎥
2 ⎢ Reluctance
⎢ Electromagnetic
⎥
torque
⎣ torque
⎦
(1)
where p is the number of pole pairs, Ψmd is the
magnet flux, Ld, Lq, Ids and Iqs are the d and q axis
inductances and currents respectively. The maximum torque in this case will occur when the current phasor is shifted by an angle γ relative to the
q axis. In surface PM motors the maximum torque
occurs at γ = 0, i.e. when the current vector is located in the q axis.
There are two distinct regimes of operation of
an IPM motor: constant torque below corner speed
and constant power above corner speed, as indicat-
AUTOMATIKA 46(2005) 3–4, 113–122
Fig. 1 Phasor diagram of an interior PM motor
ed in Figure 2. The corner speed is defined as the
maximum speed at which rated torque can be developed with rated current flowing without exceeding the maximum terminal voltage available from
the inverter. Above that speed it is possible to
maintain constant power, but it is not possible to
develop rated torque without exceeding the voltage
113
zarko.qxd
7.2.2006
15:16
Page 114
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
IPM motors, but is also used for calculation of parameters of large synchronous generators [3, 4]. The
parameters calculated in this paper refer to the
steady state operation. However, FEM can also be
used to calculate instantaneous parameters to be
used in dynamic models of IPM motors [5, 6].
The main feature of the approach presented in
this paper is its suitability for repetitive calculations
in the design stage because it allows one to extract
information about the motor inductances, the number of turns per coil and the rated current and
torque from magnetostatic finite element simulations while taking into account the terminal voltage
constraints. For the purpose of motor design, the
steady state parameters are in most cases sufficient.
This principle of parameter calculation has been
integrated into an optimization scheme used to design a 1.65 kW prototype IPM motor which has
been built and tested.
Fig. 2 Capability curves of an interior PM motor
constraint imposed by the power supply. Moreover,
the ability to maintain constant power is not universally attainable for all interior PM motor designs. Only designs which satisfy the optimal flux
weakening condition first derived by Schiferl and
Lipo [1] will give the maximum constant power output in the field weakening regime above corner
speed. This condition is given by
Ψmd = Ld IR
(2)
where Ψmd is the flux of the magnets alone linked
by the armature winding, Ld is the d axis inductance and IR is the rated armature current. The normalized characteristic current is the quantity used
to show the properties of the IPM motor in the
flux weakening regime with respect to the optimal
flux weakening condition. It is defined as
Ic =
Ψ md
.
Ld I R
2 CALCULATION OF IPM MOTOR PARAMETERS
The proposed IPM motor topology analyzed in
this paper is shown in Figure 3. The motor has two
layers of cavities in the rotor which are shaped to
accommodate magnets of a simple rectangular shape which are cheap to manufacture. The motor has
been designed using Differential Evolution optimization algorithm [6] combined with the finite element method. The FEM was used to calculate the
motor parameters for each design that emerged out
of the optimization scheme. The design objectives
were to maximize the electromagnetic torque at
corner speed and maximize the characteristic cur-
(3)
The IPM motor design which satisfies (2) apparently has Ic = 1.
The important design parameters of the IPM
motor are its inductances, and the magnet flux linkage, since they greatly affect the amount of torque
the motor can develop and its power output in the
flux weakening regime above corner speed. The calculation of parameters presented in this paper is
based on finite element method (FEM) with »permeance freezing« which allows one to use superposition to extract individual parameters of the motor
under load and preserve information about saturation while taking into account the effect of cross-saturation as well. This principle has been mentioned previously in literature [2] in the case of
114
Fig. 3 Stator and rotor laminations of the prototype IPM motor
AUTOMATIKA 46(2005) 3–4, 113–122
zarko.qxd
7.2.2006
15:16
Page 115
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
rent of the motor. The optimization has been formulated as a constrained multiobjective minimization problem where a population of nondominant
solutions is determined from which a single solution is selected as the best compromise [8]. The details of the optimization scheme used to design the
prototype IPM motor can be found in [9]. Here we
only present the results related to calculation of
the motor parameters.
To simulate the operating point at the corner
speed, a magnitude of the current vector I and its
position with respect to the q axis (angle γ) need
to be determined first. These two parameters are at
the same time constrained by the rated terminal
voltage, which in this case is Vll = 230 V (line-to-line
value). The parameters which are known are the armature current density J and the slot fill factor ffill.
They are used to calculate the available number of
ampere-turns per slot which follows from
Nc I = JSffill
(4)
where Nc is the number of turns per coil and S is
the surface area of the slot. The slot area is calculated from the slot dimensions which result from
the stator outer and inner diameters and the yoke
and tooth thicknesses.
The number of turns per coil and the current
need to be separated. The separation can be done
in a straightforward manner using a phasor diagram
and considering the fact that the sum of the motor
back emf and the voltage drops on the armature
resistance and inductance have to be equal to the
terminal voltage V. The phasor diagram for the interior PM motor is shown in Figure 1. The steady
state equations after resolving voltages and currents
into d and q components can be written in the general form
Vqs = Ra I qs + ωΨ ds
Vds = Ra Ids − ωΨ qs
(5)
V = Vqs2 + Vds2
where
Ψ qs = Ψ mqd + Lq Iqs + Lqd Ids
Ψ ds = Ψ md + Ld Ids + Ldq Iqs .
(6)
Equations (6) also include the cross saturation
terms which will be further discussed in the paper.
The motor is designed for a rated operating point
at corner speed (1000 rpm). The parameters are initially calculated with an assumption that there is
only one turn per coil with Nc I as the total current
in the coil. The available number of ampere turns
per coil Nc I is obtained from (4). The additional
problem with the IPM motor is the lack of knowledge about the current control angle γTmax (see
AUTOMATIKA 46(2005) 3–4, 113–122
Fig. 4 Torque versus control angle curve used to find the control
angle for maximum torque. Cubic spline is used to generate the
curve from five points obtained by FE method
Figure 4) at which maximum torque is achieved
with rated armature current flowing. The rated current is defined as the maximum rms current at corner speed at which the maximum temperature in
the armature winding will not exceed the value allowed by the class of insulation assuming continuous operation of the motor. To determine γTmax,
five nonlinear magnetostatic FE simulations with
γ ranging from −20° to −60° are run first. The electromagnetic torque is calculated for each value of
γ using the well known equation
Tem =
3
p(Ψ ds I qs −Ψ qs Ids )
2
(7)
where p is the number of pole pairs, Ψds, Ψqs, Ids
and Iqs are the d and q components of the flux
linkage and current respectively. The flux linkages
Ψds and Ψqs are determined from the flux linkages
of phases a, b and c. For instance, the phase a flux
linkage is calculated as a sum of the flux linkages
of all phase a coils. The flux linkage of each individual coil is equal to the line integral of the magnetic vector potential Az along the contour of the
coil. In a 2-D FE model this integral is proportional to the difference between the average potentials
in the meshed geometric regions occupied by the
coil sides located in different pole regions. The
phase a flux linkage is then
Ψa = p
Qcoil p
= p
∑
k =1
Qcoil p
∑ Ψ coilk =
k =1
⎞
1⎛
⎜ ∫ Az dS − ∫ Az dS ⎟ N c la
⎟
S⎜S
S2
⎝ 1
⎠
(8)
115
zarko.qxd
7.2.2006
15:16
Page 116
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
where Qcoilp is the number of coil sides per phase
in one pole region, p is the number of pole pairs,
Nc is the number of turns of each coil, la is the
length of the stator core and S is the cross-section
of the coil region. Subscripts 1 and 2 denote coil
sides located in different pole regions. Since the
number of turns per coil is not known at this stage,
the flux linkages Ψa0, Ψ b0 and Ψc0 are calculated
assuming Nc = 1. The flux vector can now be formed
2
Ψ 0 = Ψ ds 0 + jΨ qs 0 = (Ψ a0 + aΨ b 0 + a2Ψ c 0 ),
3
a=e
j
2π
3
(9)
with
2⎛
1
1
⎞
Ψ ds 0 = ⎜Ψ a0 − Ψ b 0 − Ψ c 0 ⎟
3⎝
2
2
⎠
1
(Ψ b0 −Ψ c0 ).
Ψ qs 0 =
3
(10)
Fig. 5 Flux lines in the cross section of the prototype IPM motor
for the case of rated torque at corner speed of 1000 rpm
The subscript 0 is used to emphasize the fact that
flux linkages are calculated with Nc = 1. The currents Iqs and Ids are also not known, but the total
ampere turns per slot Nc I are known from (4).
Using γ and Nc I one can calculate
N c I qs = Nc I cos γ
N c I ds = Nc I sin γ.
(11)
Considering the fact that Ψds = NcΨds0 and Ψ qs =
= NcΨ qs0, the torque equation (7) can be written in
the form
3
(12)
Tem = p(Ψ ds 0 N c I qs −Ψ qs 0 Nc Ids )
2
where Nc Iqs and Nc Ids are calculated from (11). With
the torque calculated for five values of γ, cubic
spline is used to generate a smooth Tem vs. γ curve
as shown in Figure 4 and find the value of Tmax
where the maximum torque occurs.
Another nonlinear simulation with γTmax as the
control angle is run to get the field solution for
this operating point. The flux lines and the distribution of permeabilities for the rated operating
point at corner speed are shown in Figures 5 and 6
respectively. The most effective approach to calculate saturated Ld, Lq and Ψmd at this operating point
and still preserve all the information about the saturation in the motor is to »freeze« the permeabilities in the nodes of the finite element mesh. Once
the permeabilities are frozen the problem becomes
linear and the parameters can be determined one
at the time. Three linear magnetostatic simulations
are needed to determine Ld, Lq and Ψmd. In addition, cross-saturation parameters Lqd, Ldq and Ψmqd
can be determined from the same simulations. Al116
Fig. 6 Distribution of relative permeabilities in the cross section of
the prototype IPM motor for the case of rated torque at corner
speed of 1000 rpm
though small in this particular case, the effect of
cross-saturation has been generally recognized as
the phenomenon caused by saturation which manifests itself as the flux linkage in the axis perpendicular to the axis where the excitation is applied. At
this stage the inductances will be calculated for
Nc = 1 since the actual Nc is still unknown.
2.1 Inductances Ld0 and Lqd0
The first linear simulation is used to calculate
Ld0 and Lqd0. The magnet flux is turned off by setting the magnet remanence Br to zero. The current
vector must be aligned with the d axis. Since the
problem has become linear after freezing the permeabilites, the magnitude of the current vector can
be chosen arbitrarily. If the magnitude is chosen to
be 1 A, then to align the current vector with the d
AUTOMATIKA 46(2005) 3–4, 113–122
zarko.qxd
7.2.2006
15:16
Page 117
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
Ld 0 =
Ψ qs 0
Ψ ds 0
, Lqd 0 =
.
ids
ids
(15)
Inductance Ld0 only takes into account the flux
linkage in the core region. The 2-D FE simulation
neglects the leakage flux in the end region. Hence,
the end winding leakage inductance Lew0 is calculated separately using a 3-D analytical approach described later in this chapter and added to Ld0 to
calculate the total Ld. For the inductance Lqd0 2-D
FE simulation is sufficient since there is no cross-saturation effect in the end region because the end
winding is located in the air.
2.2 Inductances Lq0 and Ldq0
Fig. 7 Flux lines in the cross section of the prototype IPM motor
with frozen permeabilities used for calculation of saturated inductances Ld0 and Lqd0
axis the instantaneous phase currents have to be
defined as
i
(13)
ia = 1 A , ib = ic = − a = −0.5 A.
2
The d and q components of the current vector
are then
ids = 1 A , iqs = 0.
(14)
The inductances Ld0 and Ldq0 are calculated in a
similar manner, only in this case the current vector
needs to be aligned with the q axis. The phase currents are then
ia = 0, ib = − ic =
3
A
2
(16)
which in turns gives
ids = 0, iqs = 1 A.
(17)
The field solution is shown in Figure 8. After
calculating the flux components, the inductances for
one turn per coil are given by
Lq 0 =
Ψ qs 0
, Ldq 0 =
Ψ ds 0
.
iqs
(18)
Figure 7 shows the field solution for this case.
The flux linkages of phases a, b and c are calculated according to (8). The flux vector is formed and
its d and q components are calculated using (9)
and (10). The inductances for one turn per coil are
then
This simulation is used to calculate magnet flux
linked by the armature winding. In this case the
Fig. 8 Flux lines in the cross section of the prototype IPM motor
with frozen permeabilities used for calculation of saturated inductances Lq0 and Ldq0
Fig. 9 Flux lines in the cross section of the prototype IPM motor
with frozen permeabilities used for calculation of the flux linkages
Ψmd0 and Ψmqd0
AUTOMATIKA 46(2005) 3–4, 113–122
iqs
2.3 Flux linkages Ψmd0 and Ψmqd0
117
zarko.qxd
7.2.2006
15:16
Page 118
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
magnets are turned on by setting the magnet remanence Br to the actual value while phase currents
are equal to zero. The field solution is shown in
Figure 9. The flux linkages of the phase windings
are calculated again using the previously described
procedure. Equation (10) is then used to calculate
the flux linkages Ψmd0 and Ψmq0. Note that although
the magnets act only in the direction of the d axis,
there will also be a small cross saturation flux linkage in the q axis.
2.4 End winding leakage inductance Lew0
The end winding leakage inductance is a part of
the total leakage inductance of the phase winding.
In the core region the coils are located in the slots
which, with the assumption that iron is infinitely
permeable, makes it easier to predict the distribution of the leakage flux and calculate the leakage
inductance. The end winding region is more difficult to analyze because its magnetic circuit is entirely in the air and its winding structure is often
characterized by complex three-dimensional geometry of the coils. An additional difficulty is the effect that adjacent coils and phases have on each
other.
The most accurate approach to the end winding
leakage inductance calculation would be to use the
3-D finite element method. The main problem with
the 3-D FE method is the fact that the drawing of
a complex 3-D geometric structure, mesh generation and solution of a very large system of equations are extremely time consuming. This is the
main obstacle for practical utilization of the 3-D
FE method for the end winding leakage inductance
calculation in the design stage, especially if optimization is involved. The analytical approach is the
remaining alternative. There are different closed
form analytical solutions that can be found in literature [10–12]. One of the major problems of these
solutions is that they have been derived for an assumed geometric shape of the end coil which may
not be applicable for all types of windings and all
types of machines with different power ratings.
Therefore a more flexible method has been used in
this paper which models the end coil as a set of
serially connected straight filaments. This allows
one to define the end coil geometry of an arbitrary
shape and still calculate the inductance in a unique
manner.
The mutual inductance between any two coils in
the end region is calculated by adding the contributions of all possible pairs of filaments in both
coils. The method has been described in detail in
[13, 14] for the case of a turbogenerator with double-layer involute winding. It has been modified and
adapted in this paper to be used for a single-layer
118
end winding structure typical for small permanent
magnet motors. The method also takes into account
the influence of the iron core by applying the
method of images. Some assumptions on the magnetic properties of the core and the geometry of
the end region are necessary to simplify the problem. The following assumptions are made:
– the permeability of the iron core is constant,
– the iron core surface extends infinitely and fills
the entire half-space,
– the influences of slots, air gap and rotor shaft
are neglected,
– the coils are represented by infinitely thin conductors.
The three-dimensional contour of the end coil is
replaced by an arbitrary number of straight filaments depending on the desired accuracy of the
geometric model of the coil.
Such model for a single layer overlapping winding of a prototype IPM motor is shown in Figure
10. The complete model of the end winding containing all the coils is shown in Figure 11.
Talking about mutual inductance of the end coils
is incorrect, because an end coil does not represent
a closed circuit. For the lack of a better term, we
shall refer to the mutual inductance of the end
coils by which we shall imply the contribution to
the mutual inductance of the end parts of the coils.
Generally, the mutual inductance between two
closed infinitely thin contours l1 and l2 in space can
be calculated as
µ0 d l1d l2
M=
(19)
∫ r
4 πI l
1
Fig. 10 3-D model of the end coil of a single-layer overlapping
winding comprised of 20 straight filaments
AUTOMATIKA 46(2005) 3–4, 113–122
zarko.qxd
7.2.2006
15:16
Page 119
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
phase is calculated by adding the mutual inductance
of the first coil and all the others that belong to
the same phase. The obtained result is multiplied
by two to take into consideration both sides of the
machine. The mutual inductance of two phases contains the sum of mutual inductances of every coil
from the first phase and every coil from the second
phase. Due to symmetry, the mutual inductances of
any two phases are equal. The total inductance per
phase is equal to the sum of the self inductance
and the mutual inductance with other two phases.
With the existence of the parallel paths in the winding, the obtained result is divided by the squared
number of paths ( a2p ) because the inductance per
phase is proportional to the squared number of
turns connected in series.
Fig. 11 Full 3-D model of a single-layer overlapping end winding
of the six pole prototype IPM motor. a) XY plane, b) Perspective
view
where
r is the distance between segments d l1 and
d l2 . If the contour of the end coil is replaced by a
sequence of straight filaments, then (19) is replaced
by a sum of integrals of the form (Neumann integrals)
B
b
A
a
N = cos ϕ ∫ d l1 ∫
dl2
r
(20)
The mutual inductances between the first coil
and all other coils for different values of iron permeability are shown in Figure 12. The curves obtained for µr = 0 and µr = 1 represent the lower and
upper bounds within which one would expect to
find the actual value of the end winding inductance. Table 1 contains the values of the end winding leakage inductance calculated for different values of relative permeability of iron. When µr = 0, it
is assumed that the iron is infinitely conductive and
impermeable. When µr = 1, the influence of iron is
neglected. Finally, when µr = ∞, it is assumed that
the iron is infinitely permeable and infinitely resistive. For calculation purposes, infinity is replaced
by the value of 109 for the relative permeability.
In an actual motor, the core, the shaft and the
frame would act more as a conductive screen than
as a permeable, highly resistive surface. Therefore,
it is reasonable to take the value of the end win-
which are solved for all possible combinations of
straight filaments in both coils. This integral is
based on the integration of the magnetic vector potential due to the current in one coil along the contour of the other coil and represents the flux linkage. The angle ϕ in (20) is the angle between the
directional vectors of two straight lines in 3-D space while A, B, a and b denote starting and ending
points of each filament. The general solution of the
Neumann integral for two straight filaments in an
arbitrary position relative to each other in space
can be found in [14].
The mutual inductances are calculated between
the first coil and all other coils obtained by rotating every subsequent coil by an angle that corresponds to two slot pitches. Thus, the mutual inductance between any two coils amounts to calculation
of the mutual inductance of the first coil and another coil shifted by a certain number of slot pitches. The mutual inductance of the coils of one
AUTOMATIKA 46(2005) 3–4, 113–122
Fig. 12 Mutual inductance between two end coils as a function of
relative coil positions for the single-layer winding of the prototype
IPM motor assuming one turn per coil
119
zarko.qxd
7.2.2006
15:16
Page 120
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
Table 1 End winding leakage inductance for different values of
relative iron permeability and one turn per coil
Relative
permeability
of iron core
µr
Self
inductance
of one
phase
Lsew0, µH
Mutual
inductance
between
two phases
Mew0, µH
Total leakage
inductance
Lew0 = Lsew0+Mew0
µH
0
0.9625
0.1188
1.0813
1
1.0082
0.1444
1.1527
∞
1.0539
0.1701
1.2240
Thus the number of turns per coil Nc is uniquely determined from the terminal voltage V and the
motor parameters calculated assuming that Nc = 1
for the case of rated torque at corner speed. Once
the number of turns per coil is known the rated
current of the motor is simply
IR =
2.4.1 Armature winding resistance Ra0
The armature winding resistance is initially also
calculated assuming one turn per coil. The cross
area of the conductor is calculated from the slot
area S and the slot fill factor ffill. The resistance for
a single-layer lap winding with one turn per coil is
1 lturn Qs
κ75 3 a2p f fill S
Table 2 Parameters of the prototype IPM motor
Parameter
(21)
2.4.2 Number of turns per coil and the actual
parameters
The relationships between the actual parameters
and the ones calculated for one turn per coil are
given by
Ra = N c2 Ra0
Ld = N c2 ( Ld 0 + Lew 0 )
Lqd = N c2 Lqd 0
(22)
Ldq = N c2 Ldq 0
Ψ md = N cΨ md 0
Ψ mqd = NcΨ mqd 0 .
The number of turns per coil can now be calculated by combining (5), (6) and (22) in the following manner:
Nc =
120
Symbol
Rated power, W
Rated line voltage, V
Rated current, A
Rated corner speed, rpm
Maximum speed, rpm
Rated electromagnetic torque, Nm
Rated shaft torque, Nm
Power factor
Efficiency
RMS linear current density, A/m
Magnet remanence, T
Magnet relative permeability
Number of turns per coil
Armature resistance at 75 °C, Ω
Saturated q axis inductance at
corner speed, mH
Saturated d axis inductance at
corner speed, mH
End winding leakage inductance, mH
Saturated saliency ratio
Current control angle, deg
Cross saturation inductance, mH
Cross saturation inductance, mH
Magnet flux (rms value), Vs
Magnet cross saturation flux
(rms value), Vs
RMS line-to-line back emf at
6000 rpm, V
where lturn is the total length of one coil turn, Qs is
the number of slots, ap is the number of parallel
branches and κ75 is the conductivity of copper at
750 °C.
Lq = N c2 ( Lq 0 + Lew 0 )
(24)
where NcI is calculated from (4). The inductances,
the flux linkages and the number of turns per coil
of the prototype IPM motor have been calculated
in the proposed manner and are shown in Table 2
together with some other important data of the
motor. The correctness of the IPM motor model
based on parameters thus calculated can be verified by comparing the electromagnetic torque calculated directly from the FE simulation and calculated from the expression
ding leakage inductance calculated with µr = 0 as an
actual motor parameter. At this stage the leakage
inductance is calculated assuming that Nc = 1.
Ra0 =
Nc I
Nc
Value
P
V
I
nr
nmax
Tem
T
cos ϕ
η
K1s
Br
µr
Nc
Ra
1651
230
7.63
1000
6000
16.09
15.70
0.628
0.887
20538
0.20
1.15
27
1.01
Lq
76.1
Ld
Lew
ξ
γ
Ldq
Lqd
Ψmd
32.4
0.788
2.35
−46.83
1.039
1.039
0.1012
Ψmqd
−0.0017
Emax
160
V
.
2
2
⎡⎣ Ra0 N c I ds − ωLq 0 N c I qs − ωLqd 0 N c I ds − ωΨmqd 0 ⎤⎦ + ⎡⎣Ra 0 Nc Iqs + ωLd 0 Nc Ids + ωLdq 0 Nc Iqs + ωΨmd 0 ⎤⎦ (23)
AUTOMATIKA 46(2005) 3–4, 113–122
zarko.qxd
7.2.2006
15:16
Page 121
D. @arko, D. Ban, R. Klari}
Tem = 3 p(Ψ ds I qs −Ψ qs Ids )
Finite Element Approach to Calculation of Parameters ...
(25)
with d and q flux and current components given as
rms values. After taking into account that
Ψ qs = Ψ mqd + Lq Iqs + Lqd Ids
Ψ ds = Ψ md + Ld Ids + Ldq Iqs
(26)
Ldq = Lqd , Iqs = I cos γ, Ids = I sin γ
and substituting into (25), the torque equation takes the form
Tem = 3 p ⎡⎣Ψ md I qs −Ψ mqd Ids + ( Ld − Lq ) Ids Iqs +
2
2 ⎤
+ Ldq ( I qs
− Ids
)⎦ =
= 3 p ⎡⎣Ψ md I cos γ −Ψ mqd I sin γ +
(27)
1
+ ( Ld − Lq ) I 2 sin(2 γ) + Ldq I 2 cos(2 γ) ⎤⎦.
2
The torque calculated using (27) with parameters from Table 2 is
Tem = 3 ⋅ 3 ⋅ ⎡⎣0.1012 ⋅ 7 .63 ⋅ cos( −46 .83 °) −
− ( −0.0017 ) ⋅ 7.63 ⋅ sin( −46.83 °) +
(28)
1
+ (0.0761 − 0 .0324 )7 .63 2 ⋅ sin( −2 ⋅ 46 .83 °) +
2
+ 0.001039 ⋅ 7 .63 2 cos( −2 ⋅ 46 .83 2 ) ⎤⎦ = 16 .13 Nm
which is very close to 16.09 Nm in Table 2 calculated directly from the FE solution.
3
COMPARISON OF CALCULATED AND
MEASURED INDUCTANCES
The 1.65 kW prototype IPM motor has been designed using the multiobjective optimization algorithm previously mentioned. The IPM motor cou-
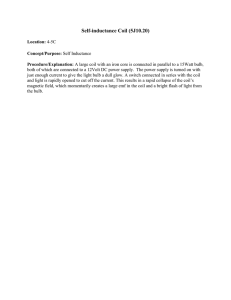
Fig. 13 Prototype IPM motor coupled to the induction machine via
torque transducer
AUTOMATIKA 46(2005) 3–4, 113–122
Fig. 14 Comparison of measured and calculated inductances of the
prototype IPM motor; a) q axis inductance, b) d axis inductance
pled to a 25 kW induction machine which is used
as a load is shown in Figure 13. The purpose of
designing and building the prototype has been to
investigate if the physical properties of the motor
predicted in the design stage can be actually
achieved in practice. The armature winding inductances Ld and Lq have been measured using static
tests with the locked rotor. The results of experiments conducted on the motor showed that the
measured q axis inductance was approximately
10–20 % lower than the calculated one, while the
measured d axis inductance was about 10 % higher
than calculated (Figures 14a and 14b). The lower
value of the inductance Lq could be attributed to a
larger effective air gap than assumed by the design.
The larger air gap can occur due to manufacturing
imperfections, but can also be created by changed
properties of the core material due to punching
and laser cutting of the rotor laminations.
121
zarko.qxd
7.2.2006
15:16
Page 122
D. @arko, D. Ban, R. Klari}
Finite Element Approach to Calculation of Parameters ...
4 CONCLUSIONS
A finite element based approach to calculation
of inductances of an interior PM motor has been
presented. This particular approach is suitable to
be used in the design stage since it allows one to
calculate the motor parameters while simultaneously taking into account the terminal voltage constraint at the corner speed. Thus it is possible to
determine the number of turns per coil and the
rated armature current from a single magnetostatic
FE simulation. This principle of parameter calculation has been integrated into an optimization
scheme used to design the 1.65 kW prototype IPM
motor which has been built and tested. The difference between calculated and measured inductances
of the prototype motor is between 10 % and 20 %.
Such difference could be attributed to manufacturing imperfections or changed properties of the core
material due to punching of the stator laminations
and laser cutting of the rotor laminations.
REFERENCES
[1] R. F. Schiferl, T. A. Lipo, Power Capability of Salient Pole
Permanent Magnet Synchronous Motors in Variable Speed
Drive Applications. IEEE Trans. on Industry Applications,
Vol. 26, pp. 115–123, Jan./Feb. 1990.
[2] N. Bianchi, S. Bolognani, Magnetic Models of Saturated
Interior Permanent Magnet Motors Based on Finite Element Analysis. Thirty-Third IAS Annual Meeting, St. Louis,
Missouri, Vol. 1, pp. 27–34, 12-15 Oct 1998.
[3] K. Ide, S. Wakui, K. Shima, M. Takahashi, K. Miyakawa, Y.
Yagi, Analysis of Saturated Synchronous Reactances of
Large Turbine Generator by Considering Cross-Magnetizing Reactances Using Finite Elements. IEEE Trans. on
Energy Conversion, Vol. 14, No. 1, March 1999.
[4] M. A. Arjona L., D. C. Macdonald, A New Lumped Steady-State Synchronous Machine Model Derived from Finite
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
Element Analysis. IEEE Trans. on Energy Conversion, Vol.
14, No. 1, March 1999.
B. [tumberger, G. [tumberger, D. Dolinar, A. Hamler, M.
Trlep, Evaluation of Saturation and Cross-Magnetization
Effects in Interior Permanent-Magnet Synchronous Motor.
IEEE Trans. on Industry Applications, Vol. 39, No. 5, Sept./
Oct. 2003.
L. Chedot, G. Friedrich, A Cross Saturation Model for Interior Permanent Magnet Synchronous Machine. Application to a Starter-Generator. 39th IAS Annual Meeting,
Vol. 1, pp. -70, Seattle, USA, 3–7 Oct. 2004.
R. Storn, K. Price, Differential Evolution – a Simple and
Efficient Adaptive Scheme for Global Optimization over
Continuous Spaces. Technical Report TR-95-012, ICSI,
March 1995.
C. A. C. Coello, R. L. Becerra, Evolutionary Multi-objective
Optimization Using a Cultural Algorithm. Proceedings of
the 2003 IEEE Swarm Intelligence Symposium, pp. 6–13,
April 2003.
D. @arko, A Systematic Approach to Optimized Design of
Permanent Magnet Motors With Reduced Torque Pulsations. Ph.D. thesis, University of Wisconsin-Madison, USA,
2004.
T. A. Lipo, Introduction to AC Machine Design. Wisconsin
Power Electronics Research Center, University of Wisconsin, 2004.
M. Liwschitz-Garik, C. C. Whiple, Electric Machinery. Vol.
2 AC Machines. Van Nostrand Publishers, 1961.
P. L. Alger, Induction Machines – Their Behavior and Uses.
Gordon and Breach Science Publishers, 1965.
I. Mandi}, Computation of Magnetic Fields in Saturated
Iron Structures with Special Reference to the Computation
of Short Circuit Performance of Induction Motors with
Wound Rotors. Ph.D. thesis, University of Southampton,
Faculty of Engineering and Applied science, Department
of Electrical Engineering, Southampton, United Kingdom,
1974.
D. Ban, D. @arko, I. Mandi}, Turbogenerator End Winding
Leakage Inductance Calculation Using a 3-D Analytical
Approach Based on the Solution of Neumann Integrals.
IEEE Trans. on Energy Conversion, Vol. 20, No 1, pp. 98–
105, March 2005.
Izra~unavanje parametara motora s umetnutim permanentnim magnetima metodom kona~nih elemenata.
Prikazana je metoda prora~una parametara motora s umetnutim permanentnim magnetima u bilo kojoj radnoj
to~ki kori{tenjem dvodimenzionalne metode kona~nih elemenata. Metoda je prilago|ena kori{tenju u fazi projektiranja motora gdje je potrebno odrediti parametre motora, posebice induktivitete, koji su istovremeno funkcija
geometrijskih dimenzija motora i ograni~enja naponskog izvora napajanja. Za prora~un reaktancije glava namota
kori{tena je analiti~ka metoda bazirana na trodimenzionalnom modelu ~eonog prostora motora u kojem je svaki
svitak modeliran kao skup me|usobno povezanih tankih ravnih linija. Prora~un me|uinduktiviteta svitaka u glavi
namota baziran je na rje{enju Neumannovog integrala. Navedeni pristup prora~unu parametara je primijenjen na
motoru s umetnutim magnetima snage 1,65 kW za koji je napravljen i ispitan prototip.
Klju~ne rije~i: motor s permanentnim magnetima, induktiviteti, metoda kona~nih elemenata, simulacija, ispitivanje
AUTHORS’ ADDRESSES
Dr. sc. Damir @arko
Prof. dr. sc. Drago Ban
University of Zagreb
Faculty of Electrical and Engineering and Computing
Department of Electrical Machines, Drives and Automation
Unska 3, 10000 Zagreb, Croatia
Ratko Klari}
Istarski vodovod d.o.o.
Sv. Ivan 8, 52420 Buzet, Croatia
Received: 2005-12-19
122
AUTOMATIKA 46(2005) 3–4, 113–122
 0
0
advertisement



Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users