Electrochemical Impedance Spectroscopy
advertisement

Electrochemical Impedance
Spectroscopy
Mark E. Orazem
Department of Chemical Engineering
University of Florida
Gainesville, Florida 32611
meo@che.ufl.edu
352-392-6207
© Mark E. Orazem, 2000-2008. All rights reserved.
Contents
•
Chapter 1. Introduction
•
Chapter 2. Motivation
•
Chapter 3. Impedance Measurement
•
Chapter 4. Representations of Impedance Data
•
Chapter 5. Development of Process Models
•
Chapter 6. Regression Analysis
•
Chapter 7. Error Structure
•
Chapter 8. Kramers-Kronig Relations
•
Chapter 9. Use of Measurement Models
•
Chapter 10. Conclusions
•
Chapter 11. Suggested Reading
•
Chapter 12. Notation
Chapter 1. Introduction
page 1: 1
Electrochemical Impedance
Spectroscopy
Mark E. Orazem
Department of Chemical Engineering
University of Florida
Gainesville, Florida 32611
meo@che.ufl.edu
352-392-6207
© Mark E. Orazem, 2000-2008. All rights reserved.
Chapter 1. Introduction
page 1: 2
Electrochemical Impedance
Spectroscopy
Chapter 1. Introduction
•
•
•
•
How to think about impedance spectroscopy
EIS as a generalized transfer function
Overview of applications of EIS
Objective and outline of course
© Mark E. Orazem, 2000-2007. All rights reserved.
Chapter 1. Introduction
1992 – no logo
page 1: 3
Chapter 1. Introduction
page 1: 4
The Blind Men and the Elephant
John Godfrey Saxe
It was six men of Indostan
To learning much inclined,
Who went to see the Elephant
(Though all of them were blind),
That each by observation
Might satisfy his mind.
The First approached the Elephant,
And happening to fall
Against his broad and sturdy side,
At once began to bawl:
“God bless me! but the Elephant
Is very like a wall!” ...
Chapter 1. Introduction
page 1: 5
Electrochemical Impedance
Spectroscopy
• Electrochemical technique
– steady-state
– transient
– impedance spectroscopy
• Measurement in terms of macroscopic quantities
– total current
– averaged potential
• Not a chemical spectroscopy
• Type of generalized transfer-function measurement
Chapter 1. Introduction
page 1: 6
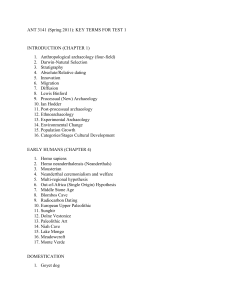
Impedance Spectroscopy
Current
10
Density, μA/cm2
Δ~I
ΔV
Z (ω ) =
= Z r + jZ j
ΔI
5
-0.2
-0.1
0.1
0.2
0.3
0.4
Potential, V
-5
-10
~
ΔV
Chapter 1. Introduction
page 1: 7
Impedance Spectroscopy
Applications
•
Electrochemical systems
–
–
–
–
–
•
Corrosion
Electrodeposition
Human Skin
Batteries
Fuel Cells
Materials
Fundamentals
•
•
•
•
Dielectric spectroscopy
Acoustophoretic
spectroscopy
Viscometry
Electrohydrodynamic
impedance spectroscopy
Chapter 1. Introduction
page 1: 8
Physical Description
• Electrode-Electrolyte Interface
– Electrical Double Layer
– Diffusion Layer
• Electrochemical Reactions
• Electrical Circuit Analogues
Chapter 1. Introduction
page 1: 9
Electrochemical Reactions
O2 + 2H2O + 4e → 4OH
-
-
Faradaic current density
⎧α O2 F
⎫
iF = iO2 = nO2 FkO2 cO2 exp ⎨
V − VO2 ⎬
⎩ RT
⎭
(
)
Total current density = Faradaic + charging
dV
i = i F + Cd
dt
Cell potential = electrode potential + Ohmic potential drop
U = V + iRe
Chapter 1. Introduction
page 1: 10
Electrical Analogues
Chapter 1. Introduction
page 1: 11
Electrical Analogue
Simple electrochemical reaction
Simple electrochemical reaction
with mass transfer
Chapter 1. Introduction
page 1: 12
Course Objectives
• Benefits and advantages of impedance spectroscopy
• Methods to improve experimental design
• Interpretation of data
–
–
–
–
–
graphical representations
regression
error analysis
equivalent circuits
process models
Chapter 1. Introduction
page 1: 13
Contents
•
•
•
•
•
•
•
•
•
•
•
•
Chapter 1. Introduction
Chapter 2. Motivation
Chapter 3. Impedance Measurement
Chapter 4. Representations of Impedance Data
Chapter 5. Development of Process Models
Chapter 6. Regression Analysis
Chapter 7. Error Structure
Chapter 8. Kramers-Kronig Relations
Chapter 9. Use of Measurement Models
Chapter 10. Conclusions
Chapter 11. Suggested Reading
Chapter 12. Notation
Chapter 1. Introduction
page 1: 14
Chapter 2. Motivation
page 2: 1
Electrochemical Impedance
Spectroscopy
Chapter 2. Motivation
•
Comparison of measurements
– steady state
– step transients
– single-sine impedance
•
•
In principle, step and single-sine perturbations yield same
results
Impedance measurements have better error structure
© Mark E. Orazem, 2000-2007. All rights reserved.
Chapter 2. Motivation
page 2: 2
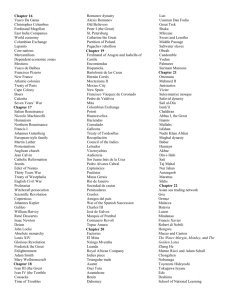
Steady-State
Polarization
Curve
0.4
Current, mA
0.3
0.2
0.1
0
0
0.05
0.1
0.15
0.2
Potential, V
0.25
0.3
0.35
Chapter 2. Motivation
page 2: 3
Steady-State Techniques
• Yield information on state after transient is completed
• Do not provide information on
– system time constants
– capacitance
• Influenced by
–
–
–
–
Ohmic potential drop
non-stationarity
film growth
coupled reactions
Chapter 2. Motivation
page 2: 4
Transient Response to a Step in Potential
1.5
ΔV=10 mV
C1
1.0
Current / mA
Current / mA
}
10
potential input
C2
R0
0.5
R1(V)
R2
current response
0
2
4
6
(t-t0) / ms
8
10
0
V
R0 + R1 (V ) + R2
I=
10
-1
10
-2
10
-5
10
-4
10
-3
10
(t-t0) / s
-2
10
-1
10
0
Chapter 2. Motivation
page 2: 5
Transient Response to a Step in Potential
Short times/high frequency
1.5
Current / mA
}
potential input
ΔV=10 mV
1.0
C1
C2
R1(V)
R2
R0
0.5
long times/low frequency
current response
0
2
4
6
(t-t0) / ms
8
10
Chapter 2. Motivation
page 2: 6
Transient Techniques:
potential or current steps
• Decouples phenomena
– characteristic time constants
• mass transfer
• kinetics
– capacitance
• Limited by accuracy of measurements
– current
– potential
– time
• Limited by sample rate
– <~1 kHz
Chapter 2. Motivation
page 2: 7
Sinusoidal Perturbation
V (t ) = V0 + ΔV cos (ω t )
i (t ) = i0 {exp(baV ) − exp( −bcV )}
iC = C0
dV
dt
i f = f (V )
V (t )
Chapter 2. Motivation
page 2: 8
Sinusoidal Perturbation
1.0
10 kHz
(i-i0) / max(i-i0)
100 Hz
1 mHz
0.5
0.0
-0.5
-1.0
-1.0
-0.5
0.0
(V-V0) / V0
0.5
1.0
Chapter 2. Motivation
page 2: 9
Lissajous Representation
V (t ) = ΔV cos(ωt )
ΔV
I (t ) =
cos(ωt + φ )
Z
B
1.0
Y(t)/Y0
0.5
O
D
A
0
ΔV OA
| Z |=
=
ΔI OB
OD
sin(φ ) = −
OA
-0.5
-1.0
-1.0
-0.5
0
X(t)/X0
0.5
1.0
Chapter 2. Motivation
page 2: 10
Impedance Response
Zj / Ω cm
-2
-25
100 Hz
-20
-15
-10
-5
0
0
10
20
30
40
-2
Zr / Ω cm
50
Chapter 2. Motivation
page 2: 11
Impedance Spectroscopy
• Decouples phenomena
– characteristic time constants
• mass transfer
• kinetics
– capacitance
• Gives same type of information as DC transient.
• Improves information content and frequency range by
repeated sampling.
• Takes advantage of relationship between real and
imaginary impedance to check consistency.
Chapter 2. Motivation
page 2: 12
System with Large Ohmic Resistance
•
•
•
R0 =10,000 Ω
R1 =1,000 Ω
C1 = 10.5 μF
– τ = 0.0105 s (15 Hz)
M. E. Orazem, T. El Moustafid, C. Deslouis, and B. Tribollet, J. Electrochem. Soc.,
143 (1996), 3880-3890.
Chapter 2. Motivation
page 2: 13
Impedance Spectrum
-600
Zj, Ω
-400
-200
0
9800
10000
10200
10400
10600
10800
11000
11200
1000
10000
100000
Zr, Ω
100000
Zr, Ω
Impedance, Ω
10000
-Zj, Ω
1000
100
10
1
0.1
0.1
1
10
100
Frequency, Hz
Chapter 2. Motivation
page 2: 14
Experimental Data
100000
10000
Impedance, Ω
1000
100
10
1
0.1
0.01
0.1
1
10
100
1000
Frequency, Hz
10000 100000
Chapter 2. Motivation
page 2: 15
Impedance Spectroscopy
vs. Step-Change Transients
• Information sought is the same
• Increased sensitivity
– stochastic errors
– frequency range
– consistency check
• Better decoupling of physical phenomena
Chapter 2. Motivation
page 2: 16
Chapter 3. Impedance Measurement
Electrochemical Impedance
Spectroscopy
Chapter 3. Impedance Measurement
•
Overview of techniques
–
–
–
–
•
A.C. bridge
Lissajous analysis
phase-sensitive detection (lock-in amplifier)
Fourier analysis
Experimental design
© Mark E. Orazem, 2000-2008. All rights reserved.
page 3: 1
Chapter 3. Impedance Measurement
page 3: 2
Measurement Techniques
•
•
•
•
A.C. Bridge
Lissajous analysis
Phase-sensitive detection (lock-in amplifier)
Fourier analysis
– digital transfer function analyzer
– fast Fourier transform
D. Macdonald, Transient Techniques in Electrochemistry, Plenum Press, NY, 1977.
J. Ross Macdonald, editor, Impedance Spectroscopy Emphasizing Solid Materials and
Analysis, John Wiley and Sons, New York, 1987.
C. Gabrielli, Use and Applications of Electrochemical Impedance Techniques, Technical
Report, Schlumberger, Farnborough, England, 1990.
Chapter 3. Impedance Measurement
page 3: 3
AC Bridge
Z2
Z1
•
Bridge is balanced when
current at D is equal to zero
Z1Z 4 = Z 2 Z 3
D
•
•
Time consuming
Accurate
f ≥ 10 Hz
Z3
Z4
Generator
Chapter 3. Impedance Measurement
page 3: 4
Lissajous Analysis
V (t ) = ΔV sin(ω t )
ΔV
I (t ) =
sin(ω t + φ )
Z
Current
B
A'
D'
O
D
A
Potential
B'
ΔV OA A'A
| Z |=
=
=
ΔI OB B'B
OD
D'D
sin(φ ) = −
=−
OA
A'A
Chapter 3. Impedance Measurement
page 3: 5
Phase Sensitive Detection
A = A0 sin(ω t + φ A )
General Signal
Reference Signal
4 A0
4
∞
1
S= ∑
sin ⎡⎣ ( 2n + 1) ω t + φ S ⎤⎦
π n =0 2n + 1
∞
1
AS =
sin (ω t + φ A ) sin ⎡⎣ ( 2n + 1) ω t + φ S ⎤⎦
∑
π n =0 2n + 1
ω
2π
2π ω
∫ ASdt =
0
2 A0
π
cos(φ A − φ S )
Has maximum value when
φ A = φS
Chapter 3. Impedance Measurement
page 3: 6
V (t ) = V0 cos(ωt )
Fourier Analysis:
I (t ) = I 0 cos(ωt + φI )
single-frequency input
T
1
I r (ω ) = ∫ I (t ) cos(ωt )dt
T 0
T
1
I j (ω ) = − ∫ I (t ) sin(ωt )dt
T 0
T
1
Vr (ω ) = ∫ V (t ) cos(ωt )dt
T 0
T
1
V j (ω ) = − ∫ V (t ) sin(ωt )dt
T 0
⎧⎪Vr + jV j ⎫⎪
Z r (ω ) = Re ⎨
⎬
⎪⎩ I r + jI j ⎪⎭
⎧⎪Vr + jV j ⎫⎪
Z j (ω ) = Im ⎨
⎬
⎪⎩ I r + jI j ⎪⎭
Chapter 3. Impedance Measurement
page 3: 7
Fourier Analysis:
Time
Z
Signal Output
Signal Input
multi-frequency input
Fast
Fourier
Transform
Z(ω)
Time
Chapter 3. Impedance Measurement
page 3: 8
Comparison
single-sine input
•
•
Good accuracy for stationary
systems
Frequency intervals of Δf/f
multi-sine input
•
•
– economical use of
frequencies
•
•
Used for entire frequency
domain
Kramers-Kronig inconsistent
frequencies can be deleted
Good accuracy for stationary
systems
Frequency intervals of Δf
– dense sampling at high
frequency required to get
good resolution at low
frequency
•
•
Often paired with PhaseSensitive-Detection (f>10 Hz)
Correlation coefficient used to
determine whether spectrum is
inconsistent with KramersKronig relations
Chapter 3. Impedance Measurement
Measurement Techniques
• A.C. bridge
– obsolete
• Lissajous analysis
– obsolete
– useful to visualize impedance
• Phase-sensitive detection (lock-in amplifier)
– inexpensive
– accurate
– useful at high frequencies
• Fourier analysis techniques
– accurate
page 3: 9
Chapter 3. Impedance Measurement
page 3: 10
Experimental Considerations
• Frequency range
– instrument artifacts
– non-stationary behavior
– capture system response
• Linearity
– low amplitude perturbation
– depends on polarization curve for system under study
– determine experimentally
• Signal-to-noise ratio
Chapter 3. Impedance Measurement
page 3: 11
Sinusoidal Perturbation
V (t ) = V0 + ΔV cos (ω t )
i (t ) = i0 exp(baV )
iC = C0
dV
dt
i f = f (V )
V (t )
Chapter 3. Impedance Measurement
page 3: 12
Linearity
0.5
f = 1 mHz
1 mV
20 mV
40 mV
1.0
(I-I0)/max(I-I0)
(I-I0)/max(I-I0)
1.0
0.0
0.5
0.0
-0.5
-0.5
-1.0
-1.0
-1.0
-0.5
0.0
0.5
f = 10 Hz
1 mV
20 mV
40 mV
1.0
-1.0
-0.5
(V-V0)/ΔV
0.5
f = 100 Hz
1 mV
20 mV
40 mV
0.5
-0.5
-1.0
-1.0
0.0
(V-V0)/ΔV
0.5
1.0
f = 10 kHz
1 mV
20 mV
40 mV
0.0
-0.5
-0.5
1.0
1.0
0.0
-1.0
0.5
(V-V0)/ΔV
(I-I0)/max(I-I0)
(I-I0)/max(I-I0)
1.0
0.0
-1.0
-0.5
0.0
(V-V0)/ΔV
0.5
1.0
Chapter 3. Impedance Measurement
page 3: 13
Zj / Ω cm
2
Influence of Nonlinearity on Impedance
model
1 mV
20 mV
40 mV
-20
-10
0
0
10
20
30
Zr / Ω cm
40
2
50
Chapter 3. Impedance Measurement
page 3: 14
Influence of Nonlinearity on Impedance
1.0
1
10
0
2
|Zj| / Ω cm
Zr / Rt
0.8
10
model
1 mV
20 mV
40 mV
0.6
0.4
10
-1
10
-2
10
-3
10
-4
model
1 mV
20 mV
40 mV
0.2
0.0
10
-3
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
10
6
10
-3
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
10
6
Chapter 3. Impedance Measurement
page 3: 15
Guideline for Linearity
100(Rt-Z(0))/Rt
bΔV ≤ 0.2
10
1
0.5
0.1
0.01
0.01
0.1
0.2
ΔV b
1
Chapter 3. Impedance Measurement
page 3: 16
Influence of Ohmic Resistance
bΔV ≤ 0.2 (1 + Re / Rt )
Re
iC = C0
dV
dt
i f = f (V )
η s (t )
i (t ) Re
V (t )
Chapter 3. Impedance Measurement
Influence of Ohmic Resistance
page 3: 17
Chapter 3. Impedance Measurement
page 3: 18
Overpotential as a Function of Frequency
Re
iC = C0
dV
dt
i f = f (V )
η s (t )
i (t ) Re
V (t )
Chapter 3. Impedance Measurement
page 3: 19
Cell Design
•
Use reference electrode to isolate influence of electrodes and
membranes
2-electrode
Working
Electrode
3-electrode
4-electrode
Working
Electrode
Working
Electrode
Ref 1
Ref 1
Ref 2
Counterelectrode
Counterelectrode
Counterelectrode
Chapter 3. Impedance Measurement
page 3: 20
Current Distribution
Counter Electrode Lead Wires
•
Seek uniform current/potential
distribution
Electrolyte
Out
Electrolyte
Out
Cover
Flange
– simplify interpretation
– reduce frequency dispersion
Working
Electrode
Cell Body
ID = 6 in.
L = 6 in.
Flange
Cover
Electrolyte In
Electrolyte In
Working Electrode Seat
Chapter 3. Impedance Measurement
Primary Current Distribution
page 3: 21
Chapter 3. Impedance Measurement
page 3: 22
Modulation Technique
•
Potentiostatic
– standard approach
– linearity controlled by
potential
⎡
⎛α F
⎞ ⎤
in = iO ⎢exp ⎜ M (V − Vcorr ) ⎟ − 1⎥
⎝ RT
⎠ ⎦
⎣
•
Galvanostatic
– good for nonstationary
systems
• corrosion
• drug delivery
– requires variable
perturbation amplitude to
maintain linearity
2
2
⎡⎛ α Fe F
⎤
1
F
α
⎞
⎛ Fe
⎞
in = iO ⎢⎜
(V − Vcorr ) ⎟ + ⎜
(V − Vcorr ) ⎟ + …⎥
⎠ 2 ⎝ RT
⎠
⎢⎣⎝ RT
⎥⎦
2
ΔI = ΔV / Z (ω )
ΔV = ΔI Z (ω )
Chapter 3. Impedance Measurement
page 3: 23
Experimental Strategies
•
•
•
•
•
Faraday cage
Short leads
Good wires
Shielded wires
Oscilloscope
I
WE
ΔV
CE
Ref
Chapter 3. Impedance Measurement
Reduce Stochastic Noise
• Current measuring range
• Integration time/cycles
– long/short integration on some FRAs
• Delay time
• Avoid line frequency and harmonics (±5 Hz)
– 60 Hz & 120 Hz
– 50 Hz & 100 Hz
• Ignore first frequency measured (to avoid start-up
transient)
page 3: 24
Chapter 3. Impedance Measurement
page 3: 25
Reduce Non-Stationary Effects
• Reduce time for measurement
– shorter integration (fewer cycles)
• accept more stochastic noise to get less bias error
– fewer frequencies
• more measured frequencies yields better parameter estimates
• fewer frequencies takes less time
– avoid line frequency and harmonic (±5 Hz)
• takes a long time to measure on auto-integration
• cannot use data anyway
– select appropriate modulation technique
• decide what you want to hold constant (e.g., current or potential)
• system drift can increase measurement time on auto-integration
Chapter 3. Impedance Measurement
Reduce Instrument Bias Errors
•
•
•
•
Faster potentiostat
Short shielded leads
Faraday cage
Check results
– against electrical circuit
– against independently obtained parameters
page 3: 26
Chapter 3. Impedance Measurement
Measurement Case Study
page 3: 27
Chapter 3. Impedance Measurement
page 3: 28
Impedance Data from a Battery
Zj / Ω
potentiostatic modulation
2-electrode
spiral-wound Alkaline AA
-20
-3
-2
-1
0.75 hours
9.5 hours
168 hours
169 hours
170 hours
171 hours
-10
0
0
1
2
3
4
5
0
0
10
Zr / Ω
20
30
Chapter 3. Impedance Measurement
page 3: 29
Improve Experimental Design
•
Question
– How can we isolate the role of positive electrode, negative
electrode, and separator?
•
Answer
- Develop a very sophisticated process
model.
- Use a four-electrode configuration.
Working
Electrode
Ref 1
Ref 2
Counterelectrode
Chapter 3. Impedance Measurement
Improve Experimental Design
•
Question
– How can we reduce stochastic noise in the measurement?
•
Answer
- Use more cycles during integration.
- Add at least a 2-cycle delay.
- Ensure use of optimal current measuring resistor.
- Check wires and contacts.
- Avoid line frequency and harmonics.
- Use a Faraday cage.
page 3: 30
Chapter 3. Impedance Measurement
page 3: 31
Improve Experimental Design
•
Question
– How can we determine the cause of variability at long times?
•
Answer
- Use the Kramers-Kronig relations to see if data are selfconsistent.
- Change mode of modulation to variable-amplitude
galvanostatic to ensure that the base-line is not changed by
the experiment.
Chapter 3. Impedance Measurement
Facilitate Interpretation
•
Question
– How can we be certain that the instrument is not corrupting
the data?
•
Answer
- Use the Kramers-Kronig relations to see if data are selfconsistent.
- Build a test circuit with the same impedance response and
see if you get the correct result.
- Compare results to independently obtained data (such as
electrolyte resistance).
page 3: 32
Chapter 3. Impedance Measurement
page 3: 33
Experimental Considerations
• Frequency range
– instrument artifacts
– non-stationary behavior
• Linearity
– low amplitude perturbation
– depends on polarization curve for system under study
– determine experimentally
• Signal-to-noise ratio
Chapter 3. Impedance Measurement
page 3: 34
Can We Perform Impedance on Transient
Systems?
• Timeframes for measurement
– Individual frequency
– Individual scan
– Multiple scans
Chapter 3. Impedance Measurement
page 3: 35
EHD Experiment
Imaginary Impedance,μA/rpm
-0.2
Data Set #2
Data Set #4
Data Set #1
-0.15
-0.1
-0.05
0
0.05
-0.05
0
0.05
0.1
Real Impedance, μA/rpm
0.15
0.2
Chapter 3. Impedance Measurement
page 3: 36
Time per Frequency for 200 rpm
0.01
0.1
1
10
Time per Measurement, s
1000
100
1000
100
100
10
10
Filter On
Filter Off
1
0.01
1
0.1
1
Frequency, Hz
10
100
Chapter 3. Impedance Measurement
page 3: 37
Impedance Scans
Zj / Ω cm
2
-15
-10
Time Interval
0-1183 s
1183-2366 s
2366-3581 s
-5
0
0
5
10
15
20
Zr / Ω cm
25
2
30
35
40
Chapter 3. Impedance Measurement
page 3: 38
Impedance Scans
Elapsed Time / s
4000
3000
2000
1000
0
10
-2
-1
10
0
10
1
10
2
10
f / Hz
3
10
4
10
5
10
Chapter 3. Impedance Measurement
page 3: 39
Time per Frequency Measured
2
Δ tf / s
10
5 cycles
3 cycles
10
1
5 seconds
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
Chapter 3. Impedance Measurement
page 3: 40
Chapter 3. Impedance Measurement
page 3: 41
Chapter 4. Representation of Impedance Data
Electrochemical Impedance
Spectroscopy
Chapter 4. Representation of Impedance Data
•
•
Electrical circuit components
Methods to plot data
– standard plots
– subtract electrolyte resistance
•
Constant phase elements
© Mark E. Orazem, 2000-2008. All rights reserved.
page 4: 1
Chapter 4. Representation of Impedance Data
page 4: 2
Addition of Impedance
Z1
Z1
Z2
Z2
Z = Z1 + Z 2
Y=
1
1 1
+
Y1 Y2
Z=
1
1
1
+
Z1 Z 2
Y = Y1 + Y2
Chapter 4. Representation of Impedance Data
page 4: 3
-Zj
Circuit Components
Re
Z = Re
Cdl
Zr
-Zj
Re
Re
ω
1
1
Z = Re +
= Re − j
jωCdl
ωCdl
j = −1
Re
Zr
Chapter 4. Representation of Impedance Data
page 4: 4
Simple RC Circuit
Cdl
Rt
2
Rf
= Re +
= Re +
ω
= Rt Cdl
ω
-Zj
Re
Z = Re +
1
1
Re + Rt
Note:
1
+ jωCdl
Rt
ω = 2π f
ω ≡ rad / s or s-1
Rt
1 + jω Rt Cdl
f ≡ cycles / s or
Rt
1 + (ω Rt Cdl )
Zr
Re
2
ω Rt 2Cdl
−j
2
1 + (ω Rt Cdl )
Hz
Chapter 4. Representation of Impedance Data
page 4: 5
1200
1000
Cdl
800
Zr or -Zj / Ω
Impedance
Re
real
imaginary
600
400
200
Slope = 1
Rf
0
0.001
0.01
0.1
1
10
100
1000
10000
Frequency / Hz
-600
10000
10 Hz
-400
-200
1000
Zr or -Zj / Ω
Zj, Ω
ω
100 Hz
1 Hz
100
real
imaginary
10
0
0
200
400
600
Zr / Ω
800
1000
Slope = -1
1200
1
0.001
0.01
0.1
1
10
Frequency / Hz
100
1000
10000
Chapter 4. Representation of Impedance Data
page 4: 6
Bode Representation
-90
10000
magnitude
phase angle
-60
Z = Z r + jZ j
100
10
1
0.001
Z r =| Z | cos (φ )
Z j =| Z | sin (φ )
0.01
0.1
1
-30
10
100
Frequency / Hz
1000
0
10000
φ / degrees
|Z| / Ω
1000
Chapter 4. Representation of Impedance Data
page 4: 7
Modified Phase Angle
⎛ Zj ⎞
φ * = tan ⎜
⎟
−
Z
R
e ⎠
⎝ r
−1
Input & output are in phase
-90
10000
|Z| / Ω
100
10
Note:
magnitude
modified magnitude
phase angle
modified phase angle
-60
φ∗ / degrees
1000
The modified phase angle yields
excellent insight, but we need an
accurate estimate for the solution
-30
resistance.
1
0.1
⎛ Zj ⎞
φ = tan ⎜ ⎟
⎝ Zr ⎠
−1
0.01
0.001
0.01
0.1
1
10
100
1000
0
10000
Frequency / Hz
Input & output are out of phase
Chapter 4. Representation of Impedance Data
page 4: 8
Constant Phase Element
CPE
Z − Re
1
=+
α
Rt
1 + ( jω ) Rt Q
Re
Rt
-0.6
α=1
α=0.9
α=0.8
α=0.7
α=0.6
α=0.5
Zj / Rt
-0.4
-0.2
0.0
0.0
0.2
0.4
0.6
(Zr−Re) / Rt
0.8
1.0
Chapter 4. Representation of Impedance Data
|Zj| / Rt
Slope =
+α
page 4: 9
CPE: Log Imaginary
10
Slope =
−α
0
10
-1
10
-2
10
-3
10
-4
10
-5
α=1
α=0.9
α=0.8
α=0.7
α=0.6
α=0.5
-5
-4
-3
-2
-1
0
1
2
3
4
10 10 10 10 10 10 10 10 10 10 10
5
ω/τ
Note: With a CPE (α≠1), the asymptotic slopes are no longer ±1.
Chapter 4. Representation of Impedance Data
page 4: 10
CPE: Modified Phase Angle
α=1
α=0.9
α=0.8
α=0.7
α=0.6
α=0.5
-60
*
φ / degrees
-90
Note:
-30
The high-frequency asymptote for
the modified phase angle depends
on the CPE coefficient α.
0
-5
-4
-3
-2
-1
0
1
2
3
4
10 10 10 10 10 10 10 10 10 10 10
ω/τ
5
Chapter 4. Representation of Impedance Data
page 4: 11
Example for Synthetic Data
Z ( f ) = Re +
Rt + zd ( f )
1 + ( j 2π f ) Qdl ( Rt + zd ( f ) )
zd ( f ) = zd ( f )
α
tanh
j 2π f τ
j 2π f τ
M. Orazem, B. Tribollet, and N. Pébère, J. Electrochem. Soc., 153 (2006), B129-B136.
Chapter 4. Representation of Impedance Data
page 4: 12
α=1
α = 0.7
α = 0.5
400
0.1 Hz
1 Hz
200
10 mHz
1 mHz
10 Hz
100 Hz
0
0
200
400
600
800
| Z | / Ω cm
2
Zr / Ω cm
10
10
1000
2
-90
α=1
α = 0.7
α = 0.5
3
1200
α=1
α = 0.7
α = 0.5
-75
φ / degree
−Zj / Ω cm
2
Traditional Representation
2
-60
-45
-30
-15
0
10
-3
-2
10
10
-1
10
0
1
10
10
f / Hz
2
10
3
10
4
10
5
6
10
10
-3
10
-2
10
-1
10
0
10
1
10
f / Hz
2
3
10
10
4
10
5
10
6
Chapter 4. Representation of Impedance Data
page 4: 13
Re-Corrected Bode Phase Angle
φadj
⎛
Zj
= tan ⎜
⎜Z −R
e ,est
⎝ r
−1
φadj / degree
-90
⎞
⎟⎟
⎠
φadj (∞) = −90(α )
α=1
α = 0.7
α = 0.5
-75
-60
-45
-30
-15
0
10
-3
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
10
6
Chapter 4. Representation of Impedance Data
page 4: 14
Re-Corrected Bode Magnitude
Z
3
10
2
10
1
10
0
=
Slope =
−α
| Z |adj / Ω cm
2
10
adj
2
Z
−
R
+
Z
( r e,est ) j
2
10
slope = −α
α=1
α = 0.7
α = 0.5
-1
10
-3
10
-2
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
10
5
Chapter 4. Representation of Impedance Data
page 4: 15
Log(|Zj|)
Slope = α
3
10
2
10
1
10
0
| Zj | / Ω cm
Slope =
−α
α=1
α = 0.7
α = 0.5
2
10
slope=α
slope=−α
10
-1
10
-2
10
-3
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
10
6
Chapter 4. Representation of Impedance Data
page 4: 16
Effective Capacitance or CPE Coefficient
Z CPE =
1
⎛ απ ⎞
Qeff = − sin ⎜
⎟
α
⎝ 2 ⎠ ( 2π f ) Z j (f )
1
QCPE ( j 2π f )
α
Qeff / Qdl
100
α=1
α = 0.7
α = 0.5
10
1
10
-3
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
10
6
Chapter 4. Representation of Impedance Data
Alternative Plots
• Re-Corrected Bode Plots (Phase Angle)
– Shows expected high-frequency behavior for surface
– High-Frequency limit reveals CPE behavior
• Re-Corrected Bode Plots (Magnitude)
– High-Frequency slope related to CPE behavior
• Log|Zj|
– Slopes related to CPE behavior
– Peaks reveal characteristic time constants
• Effective Capacitance
– High-Frequency limit yields capacitance or CPE
coefficient
page 4: 17
Chapter 4. Representation of Impedance Data
Application
page 4: 18
Chapter 4. Representation of Impedance Data
page 4: 19
Mg alloy (AZ91) in 0.1 M NaCl
-200
-100
Zj / Ω cm
2
65.5 Hz
0.011 Hz
0
15.5 kHz
0.0076 Hz
time / h
0.5
3.0
6.0
100
200
0
100
200
300
Zr / Ω cm
400
2
500
600
Chapter 4. Representation of Impedance Data
(
k1
Mg ⎯⎯→
Mg +
)
Proposed Model
−
+
e
ads
(Mg )
+
k2
−
2+
+
H
O
⎯
⎯→
Mg
+
OH
+ 12 H 2
2
ads
(Mg )
+
ads
page 4: 20
k3
⎯⎯→
Mg 2+ + e −
←⎯⎯
k −3
“negative difference effect”
(NDE)
k4
⎯
⎯→
Mg 2+ + 2 OH −
Mg(OH) 2
←⎯⎯
k −4
k5
⎯⎯→
Mg(OH) 2
MgO + H 2 O
←⎯⎯
k -5
G. Baril, G. Galicia, C. Deslouis, N. Pébère, B. Tribollet, and V. Vivier, J. Electrochem. Soc.,
154 (2007), C108-C113
Chapter 4. Representation of Impedance Data
page 4: 21
Physical
Interpretation
Mg⎯
⎯→(Mg ) + e
k1
+
−
ads
k3
⎯
⎯
→ 2+ −
+
Mg ads
Mg + e
←⎯⎯
k−3
)
-200
-100
65.5 Hz
2
Zj / Ω cm
(
diffusion of Mg2+
0.011 Hz
0
15.5 kHz
0.0076 Hz
time / h
0.5
3.0
6.0
100
200
0
100
200
300
Zr / Ω cm
400
500
600
2
relaxation of (Mg+)ads.
intermediate
Chapter 4. Representation of Impedance Data
page 4: 22
Log(|Zj|
2
10
1
|Zj| / Ω cm
2
10
Slope =
−α
time / h
0.5
3.0
6.0
10
0
10
-3
10
-2
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
10
5
Chapter 4. Representation of Impedance Data
page 4: 23
Effective CPE Coefficient
10
5
-2
Qeff / (MΩ cm ) s
α
Qeff
1
⎛ απ ⎞
= − sin ⎜
⎟
α
2
⎝
⎠ ( 2π f ) Z j (f )
4
10
3
10
2
10
1
-1
10
time / h
0.5
3.0
6.0
10
-2
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
10
5
Chapter 4. Representation of Impedance Data
page 4: 24
Re-Corrected Phase Angle
φadj (∞) = −90α
3
10
2
| Z |adj / Ω cm
2
10
φadj
⎛
Zj
= tan ⎜
⎜Z −R
e ,est
⎝ r
−1
time / h
0.5
3.0
6.0
10
1
10
0
10
-3
10
-2
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
10
5
⎞
⎟⎟
⎠
Chapter 4. Representation of Impedance Data
page 4: 25
-200
Physical Parameters
-100
Zj / Ω cm
2
65.5 Hz
0.011 Hz
0
15.5 kHz
0.0076 Hz
time / h
0.5
3.0
6.0
100
200
0
100
200
300
Zr / Ω cm
400
2
500
600
Chapter 4. Representation of Impedance Data
page 4: 26
Experimental device for LEIS
layer
Z local =
ΔVapplied
Δilocal
Chapter 4. Representation of Impedance Data
page 4: 27
Mg alloy (AZ91) in Na2SO4 10-3 M at the corrosion potential
after 1 h of immersion. Electrode radius 5500 µm.
Global impedance
Global impedance analyzed with a CPE (α = 0.91). Only the
HF loop of the diagram is analyzed
J.-B. Jorcin, M. E. Orazem, N. Pébère, and B. Tribollet, Electrochimica Acta, 51 (2006),
1473-1479.
Chapter 4. Representation of Impedance Data
page 4: 28
Local impedance
α = 1 to 0.92
Chapter 4. Representation of Impedance Data
page 4: 29
Mg alloy (AZ91) in Na2SO4 10-3 M at the corrosion potential
after 1 h of immersion. Electrode radius 5500 µm
The local impedance has a pure RC behavior.
Local impedance
The CPE is explained by a 2d distribution of the
resistance as shown in the figure.
Chapter 4. Representation of Impedance Data
Comparison to
Theory
page 4: 30
Chapter 4. Representation of Impedance Data
page 4: 31
Graphical Representation of Impedance
Data
• Expanded Range of Plot Types
– Facilitate model development
– Identify features without complete system model
• Suggested Plots
– Re-Corrected Bode Plots (Phase Angle)
• Shows expected high-frequency behavior for surface
• High-Frequency limit reveals CPE behavior
– Re-Corrected Bode Plots (Magnitude)
• High-Frequency slope related to CPE behavior
– Log|Zj|
• Slopes related to CPE behavior
• Peaks reveal characteristic time constants
– Effective Capacitance
• High-Frequency limit yields capacitance or CPE coefficient
Chapter 4. Representation of Impedance Data
page 4: 32
Plots based on Deterministic Models
Chapter 4. Representation of Impedance Data
page 4: 33
Convective Diffusion to a RDE
low-frequency asymptote
Reduction of Fe(CN)63- on a Pt Disk, i/ilim = 1/2
Zj / Ω
-100
120 rpm
600 rpm
1200 rpm
2400 rpm
-50
0
0
50
100
150
Zr / Ω
200
250
Chapter 4. Representation of Impedance Data
page 4: 34
−Zj / (Zr,max−Re )
Normalized Impedance Plane
0.6
120 rpm
600
1200
2400
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1.0
1.2
(Zr−Re) / (Zr,max−Re)
Note: We again need an accurate estimate for the solution resistance.
Chapter 4. Representation of Impedance Data
page 4: 35
(Zr−Re ) / (Zr,max−Re )
Normalized Real
10
0
10
-1
10
-2
10
-3
10
-4
10
p =ω /Ω
120 rpm
600
1200
2400
-3
10
-2
10
-1
10
0
10
p
1
10
2
10
3
10
4
10
5
Chapter 4. Representation of Impedance Data
page 4: 36
Normalized Imaginary
−Zj / (Zr,max−Re )
10
10
0
-1
10
-2
10
-3
10
120 rpm
600
1200
2400
-3
10
-2
10
-1
10
0
10
p
1
10
2
10
3
10
4
10
5
Chapter 4. Representation of Impedance Data
page 4: 37
(Zr−Re ) / (Zr,max−Re )
Straight line at low frequency
1.0
120 rpm
600
1200
2400
0.8
0.6
0.4
0.2
0
0
0.1
0.2
0.3
−pZj / (Zr,max−Re )
0.4
0.5
Tribollet, Newman, and Smyrl, JES 135 (1988), 134-138.
Chapter 4. Representation of Impedance Data
page 4: 38
Slope at low frequency yields Di
lim ⎛ d Re {Z } ⎞ = λSc1/ 3 = s
p →0 ⎜
⎜ dp Im {Z } ⎟⎟
⎝
⎠
λ = 1.2261 + 0.84Sc −1/ 3 + 0.63Sc −2 / 3
(Zr−Re ) / (Zr,max−Re )
1.0
0.8
Sc = 1090.6
0.6
0.4
0
0.01
0.02
−pZj / (Zr,max−Re)
0.03
0.04
Chapter 4. Representation of Impedance Data
n-GaAs Diode:
6
Zj / Ω
-4x10
page 4: 39
scaling based on
-2x10
6
Arrhenius relationship
320 K
340 K
0
10
8
10
7
10
6
10
5
10
4
10
3
10
2
10
1
10
0
2x10
6
6
4x10
6x10
6
6
8x10
1x10
7
Zr / Ω
−Zj / Ω
Zr / Ω
0
320 K
340 K
360 K
380 K
400 K
10
6
10
5
10
4
10
3
10
2
10
1
10
0
10
10
0
10
1
10
2
10
f / Hz
3
10
4
10
5
320 K
340 K
360 K
380 K
400 K
-1
10
0
10
1
10
2
10
f / Hz
3
10
4
10
5
Chapter 4. Representation of Impedance Data
page 4: 40
Normalized Real
1.0
320 K
340 K
360 K
380 K
400 K
Zr / |Zmax|
0.8
0.6
f*=
f
⎛ E ⎞
exp ⎜
⎟
f0
⎝ kT ⎠
-4
-3
0.4
0.2
0.0
10
10
10
-2
10
-1
10
0
10
1
10
2
10
3
f*
Jansen, Orazem, Wojcik, and Agarwal, JES 143 (1996), 4066-4074.
Chapter 4. Representation of Impedance Data
page 4: 41
Normalized Imaginary
−Zj / |Zmax|
0.5
0.4
320 K
340 K
360 K
380 K
400 K
0.3
0.2
0.1
0.0
10
-4
10
-3
10
-2
10
-1
10
f*
0
10
1
10
2
10
3
Chapter 4. Representation of Impedance Data
page 4: 42
Normalized Log Real
Zr / |Zmax|
10
0
10
-1
10
-2
10
-3
10
-4
10
-5
10
-6
320 K
340 K
360 K
380 K
400 K
10
-4
10
-3
10
-2
10
-1
10
f*
0
10
1
10
2
10
3
Chapter 4. Representation of Impedance Data
page 4: 43
Normalized Log Imaginary
−Zj / |Zmax|
10
0
10
-1
10
-2
10
-3
10
-4
10
-5
10
-6
320 K
340 K
360 K
380 K
400 K
10
-4
10
-3
10
-2
10
-1
10
f*
0
10
1
10
2
10
3
Chapter 4. Representation of Impedance Data
page 4: 44
Superlattice
Structure
Z j, Ω
-4.0E+08
298.8
290
285
270
260
-2.0E+08
0.0E+00
0.0E+00
2.0E+08
4.0E+08
Zr , Ω
-Z j, Ω
-4.0E+07
260
292.5
297.2
297.7
297.8
297.8
298.8
-2.0E+07
0.0E+00
0.0E+00
2.0E+07
4.0E+07
Zr , Ω
6.0E+07
6.0E+08
Chapter 4. Representation of Impedance Data
page 4: 45
Normalized Real Part
1.2
1
Z/Z r,max
0.8
0.6
0.4
0.2
0
0.0001
0.01
1
f*=
f
⎛ E ⎞
exp ⎜
⎟
f0
⎝ kT ⎠
100
10000
Chapter 4. Representation of Impedance Data
page 4: 46
Normalized Imaginary Part
-0.4
Zj / Z r,max
-0.3
-0.2
-0.1
0
0.1
0.0001
0.01
1
f*=
f
⎛ E ⎞
exp ⎜
⎟
f0
⎝ kT ⎠
100
10000
Chapter 4. Representation of Impedance Data
page 4: 47
e/T / s K
-1 2
DLTS of n-GaAs diode
2
0.48 eV
0.32 eV
0.83 eV
0.002
0.003
0.004
0.005
1/T / K
-1
0.006
0.007
Chapter 4. Representation of Impedance Data
page 4: 48
n-GaAs
1.E+11
TR / K
1.E+10
0.25 eV
1.E+09
0.45 eV
0.27 eV
1.E+08
1.E+07
0.77 eV
1.E+06
0.0022 0.0024 0.0026 0.0028 0.003
-1
1/T / K
0.0032 0.0034
Chapter 4. Representation of Impedance Data
page 4: 49
Mott-Schottky Plots
high-frequency asymptote
Blocking
Contact
∂qsc
C=
∂Φ 0
Ohmic
Contact
GaAs
T
Electron Energy
d 2Φ
e
=
−
p − n + ( Nd − Na ))
(
2
ε
dy
Ec
Ef
Et
Eg
1
=−
2
C
(
2 Φ 0 − Φ fb ± kT
ε F ( Nd − Na )
Ev
Position
Dean and Stimming, J. Electroanal. Chem. 228 (1987), 135-151.
e
)
Chapter 4. Representation of Impedance Data
page 4: 50
C as a function of Potential
intrinsic semiconductor
-3
10
-4
10
-5
10
-6
10
-7
10
-8
C / μF cm
-2
10
-0.4
-0.2
0
(Φ-Φfb) / V
0.2
0.4
Chapter 4. Representation of Impedance Data
page 4: 51
1/C2 as a function of Potential
n- or p-doped semiconductor
4
16
3
8
-2
-3
16
-3
(Nd−Na )= −10 cm
n-type
4
C / 10 cm μF
-2
(Nd−Na )= +10 cm
p-type
2
1
+10
17
cm
-3
−10
17
-3
cm
0
-3
-2
-1
0
(Φ-Φfb) / V
1
2
3
Chapter 4. Representation of Impedance Data
page 4: 52
GaAs-Schottky Diode
8
4
C
-2
/ nF
-2
6
2
0
-3
-2
-1
0
Potential / V
1
2
Chapter 4. Representation of Impedance Data
page 4: 53
Choice of Representation
• Plotting approaches are useful to show governing
phenomena
• Complement to regression of detailed models
• Sensitive analysis requires use of properly weighted
complex nonlinear regression
Chapter 4. Representation of Impedance Data
page 4: 54
Chapter 5. Development of Process Models
Electrochemical Impedance
Spectroscopy
Chapter 5. Development of Process Models
•
•
•
•
•
Use of Circuits to guide development
Develop models from physical grounds
Model case study
Identify correspondence between physical models and
electrical circuit analogues
Account for mass transfer
© Mark E. Orazem, 2000-2008. All rights reserved.
page 5: 1
Chapter 5. Development of Process Models
Use circuits to create framework
page 5: 2
Chapter 5. Development of Process Models
Addition of Potential
page 5: 3
Chapter 5. Development of Process Models
Addition of Current
page 5: 4
Chapter 5. Development of Process Models
page 5: 5
Equivalent Circuit at the Corrosion Potential
Chapter 5. Development of Process Models
Equivalent Circuit for a Partially Blocked
Electrode
page 5: 6
Chapter 5. Development of Process Models
page 5: 7
Equivalent Circuit for an Electrode Coated
by a Porous Layer
Chapter 5. Development of Process Models
page 5: 8
Equivalent Electrical Circuit for an Electrode
Coated by Two Porous Layers
εε 0
; ε 0 = 8.8452 × 10−14 F/cm
δ
R A2 = δA2 / κA2
CA 2 =
Chapter 5. Development of Process Models
Use kinetic models to determine
expressions for the interfacial impedance
page 5: 9
Chapter 5. Development of Process Models
page 5: 10
Approach
√
√
√
√
√
√
√
√
identify reaction mechanism
write expression for steady state current contributions
write expression for sinusoidal steady state
sum current contributions
account for charging current
account for ohmic potential drop
account for mass transfer
calculate impedance
Chapter 5. Development of Process Models
page 5: 11
General Expression for Faradaic Current
i f = f (V , ci ,0 , γ i )
{
~ j ωt
i = i + Re i e
⎛ ∂f
∂
f
⎛
⎞
+ ∑⎜
if = ⎜
V
⎟
⎜
∂
V
⎝
⎠ci ,0 ,γ k
i ⎝ ∂ci ,0
}
⎞
ci ,0
⎟⎟
⎠V ,c j , j ≠i ,γ k
⎛ ∂f ⎞
γk
+ ∑⎜
⎟
k ⎝ ∂γ k ⎠V , c γ
j j , j≠k
Chapter 5. Development of Process Models
page 5: 12
Reactions Considered
• Dependent on Potential
• Dependent on Potential and Mass Transfer
• Dependent on Potential, Mass Transfer, and Surface
Coverage
• Coupled Reactions
Chapter 5. Development of Process Models
page 5: 13
Irreversible Reaction:
Dependent on Potential
z+
A → A + ne
z+
•
•
•
−
Potential-dependent heterogeneous reaction
Two-dimensional surface
No effect of mass transfer
Chapter 5. Development of Process Models
page 5: 14
Current Density
steady-state
⎛ αA F ⎞
iA = nA FkA exp ⎜
V⎟
⎝ RT ⎠
iA = K A exp ( bAV )
oscillating component
iA = K AbA exp ( bAV )V
V
iA =
Rt ,A
Rt ,A
1
=
K AbA exp ( bAV )
Chapter 5. Development of Process Models
page 5: 15
Charging Current
high frequency
dV
i = i f + Cdl
dt
i = if + jω CdlV
V
i =
+ jω CdlV
Rt ,A
⎛ 1
⎞
= V ⎜⎜
+ jω Cdl ⎟⎟
⎝ Rt ,A
⎠
low frequency
Rt ,A
V
=
i 1 + jω R C
t ,A dl
Chapter 5. Development of Process Models
page 5: 16
Ohmic Contributions
U = iRe + V
~ ~
~
U = i Re + V
U
V
Z A = = Re +
i
i
Rt ,A
= Re +
1+jω Rt ,ACdl
Chapter 5. Development of Process Models
page 5: 17
Steady Currents in Terms of Rt,A
iA = K A exp ( bAV )
β A = 2.303/ bA
iA = K A exp ( 2.303V β A )
Rt ,A
1
βA
=
=
K AbA exp ( bAV ) 2.303iA
iA =
βA
2.303Rt ,A
β A = 2.303Rt ,A iA
Chapter 5. Development of Process Models
Irreversible Reaction:
Dependent on Potential and Mass Transfer
O + ne − → R
•
•
•
Irreversible potential-dependent heterogeneous reaction
Reaction on two-dimensional surface
Influence of transport of O to surface
page 5: 18
Chapter 5. Development of Process Models
page 5: 19
Current Density
steady-state
iO = − K O cO,0 exp ( −bOV )
oscillating component
iO = K O bO cO,0 exp ( −bOV )V − K O exp ( −bOV ) cO,0
V
=
− K O exp ( −bOV ) cO,0
Rt ,O
Rt ,O =
1
K O cO,0 exp ( −bOV )
Chapter 5. Development of Process Models
page 5: 20
Mass Transfer
dcO
iO = −nO FDO
dy
0
iO = iO + Re {iO e jω t }
iO = − nO FDO dcO
dy
0
c
iO = −nO FDO O,0 θ′ ( 0 )
δO
Chapter 5. Development of Process Models
page 5: 21
Combine Expressions
V
iO =
− K O exp ( bOV ) cO,0
Rt ,O
iOδ O
cO,0 = −
n FD θ′ ( 0 )
O
O
Chapter 5. Development of Process Models
page 5: 22
Current Density
V
iO =
Rt ,O +
δO
nO FDO cO,0
1 ⎛
1 ⎞
− ⎜
bO ⎝ θ ′(0) ⎟⎠
V
=
Rt ,O + zd ,O
zd ,O =
Rt ,O
δO
nO FDO cO,0
1 ⎛
1 ⎞
− ⎜
bO ⎝ θ ′(0) ⎟⎠
1
=
K O cO,0 exp ( −bOV )
Chapter 5. Development of Process Models
page 5: 23
Calculate Impedance
dV
i = i f + Cdl
dt
i = iO + jω CdlV
U = iRe + V
~ ~
~
U = i Re + V
V
i =
+ jω CdlV
Rt ,O + zd ,O
⎛
⎞
1
= V ⎜⎜
+ jω Cdl ⎟⎟
⎝ Rt ,O + zd ,O
⎠
U
V
Z O = = Re +
i
i
Rt ,O + zd ,O
= Re +
1+jω Cdl ( Rt ,O + zd ,O )
Chapter 5. Development of Process Models
page 5: 24
Comparison to Circuit Analog
Z O = Re +
Rt ,O + zd ,O
1+jω Cdl ( Rt ,O + zd ,O )
Cdl
Re
zd,O
Rt,O
Chapter 5. Development of Process Models
page 5: 25
Irreversible Reaction:
Dependent on Potential and Adsorbed Intermediate
B
B ⎯⎯
→ X+e
k1
X ⎯⎯→ P+e
k2
•
•
•
P
X
X
X
-
Potential-dependent heterogeneous reactions
Adsorption of intermediate on two-dimensional surface
Maximum surface coverage
X
Chapter 5. Development of Process Models
page 5: 26
Steady-State Current Density
reaction 1: formation of X
(
i1 = K1 (1 − γ ) exp b1 (V − V1 )
reaction 2: formation of P
(
i2 = K 2γ exp b2 (V − V2 )
total current density
i = i1 + i2
)
)
Chapter 5. Development of Process Models
page 5: 27
Steady-State Surface Coverage
balance on γ
d γ i1 i2
Γ
= −
dt F F
=0
steady-state value for γ
γ
(
=
K exp ( b (V − V ) ) + K
)
exp ( b (V − V ) )
K1 exp b1 (V − V1 )
1
1
1
2
2
2
Chapter 5. Development of Process Models
page 5: 28
Steady-State Current Density
(
)
(
i = K1 (1 − γ ) exp b1 (V − V1 ) + K 2γ exp b2 (V − V2 )
where
γ
(
=
K exp ( b (V − V ) ) + K
)
exp ( b (V − V ) )
K1 exp b1 (V − V1 )
1
1
1
2
2
2
)
Chapter 5. Development of Process Models
page 5: 29
Oscillating Current Density
(
)
(
i = K1 (1 − γ ) exp b1 (V − V1 ) + K 2γ exp b2 (V − V2 )
)
⎛
⎞
i = ⎜ 1 + 1 ⎟ V + K exp b (V − V ) − K exp b (V − V ) γ
2
2
2
1
1
1
⎜R
⎟
R
t ,2 ⎠
⎝ t ,1
(
(
)
(
)
Rt ,1 = ⎡ K1b1 (1 − γ ) exp −b1 (V − V1 ) ⎤
⎣
⎦
(
))
(
)
Rt ,2 = ⎡ K 2 b2γ exp −b2 (V − V2 ) ⎤
⎣
⎦
−1
−1
Chapter 5. Development of Process Models
page 5: 30
Need Additional Equation
balance on γ
1⎛ 1
1 ⎞
Γjωγ = ⎜
−
⎟⎟ V − K1 exp b1 (V − V1 ) + K 2 exp b2 (V − V2 ) γ
⎜
F ⎝ Rt ,1 Rt ,2 ⎠
(
γ =
(
(
(
)
Rt−,11 − Rt−,21
)
(
(
F Γjω + K1 exp b1 (V − V1 ) + K 2 exp b2 (V − V2 )
))
))
V
Chapter 5. Development of Process Models
page 5: 31
Impedance
(
)
(
)
)
(
−1
−1
⎡
⎤
⎡
⎤
K
exp
b
V
V
K
exp
b
V
V
R
R
−
−
−
−
t ,2 ⎦
2(
2)
1
1(
1 ) ⎦ ⎣ t ,1
1 1 ⎣ 2
= +
Z Rt
F Γjω + F K1 exp b1 (V − V1 ) + K 2 exp b2 (V − V2 )
=
1
A
+
Rt jω + B
where
1
1
1
=
+
Rt Rt , M Rt , X
(
(
))
Chapter 5. Development of Process Models
page 5: 32
Chapter 5. Development of Process Models
page 5: 33
Chapter 5. Development of Process Models
i f = iFe + iH 2 + iO 2
-0.4
Potential, V (Cu/CuSO4)
Corrosion of
Steel
page 5: 34
Fe → Fe2+ + 2e-
-0.6
O2+2H2O + 4e- → 4OH-
-0.8
-1.0
2H2O + 2e- → H2+2OH-
-1.2
0.01
0.1
1
10
Current Density, mA/ft2
100
Chapter 5. Development of Process Models
page 5: 35
Corrosion: Fe → Fe2+ + 2eiFe = K Fe exp ( bFeV )
iFe = K FebFe exp ( bFeV )V
~
V
~
iFe =
Rt ,Fe
Rt ,Fe
1
=
K FebFe exp ( bFeV )
Chapter 5. Development of Process Models
page 5: 36
Steady Currents in Terms of Rt
iFe = K Fe exp ( bFeV )
β Fe = 2.303/ bFe
iFe = K Fe exp ( 2.303V β Fe )
Rt ,Fe
1
β Fe
=
=
K FebFe exp ( bFeV ) 2.303iFe
iFe =
β Fe
2.303Rt ,Fe
Important: Note the relationship among steady-state current density,
Tafel slope, and charge transfer resistance.
Chapter 5. Development of Process Models
page 5: 37
H2 Evolution: 2H2O + 2e- → H2+2OH-
(
)
(
)
iH 2 = − K H 2 exp −bH 2V
iH 2 = K H 2 bH 2 exp −bH 2V V
~
V
~
iH 2 =
Rt ,H 2
Rt,H 2
1
=
K H 2 bH 2 exp −bH 2V
(
)
Chapter 5. Development of Process Models
page 5: 38
O2 Reduction: O2+2H2O + 4e- → 4OH-
(
)
(
V ) c
)
iO2 = − K O2 cO2 ,0 exp −bO2V
iO2 = KO2 bO2 cO2 ,0 exp −bO2V V
(
− K O2 exp −bO2
O2 ,0
Chapter 5. Development of Process Models
page 5: 39
O2 Evolution: O2+2H2O + 4e- → 4OHmass transfer: in terms of dimensionless
gradient at electrode surface
iO2 = −nO2 FDO2
dcO2
dy
0
cO2 ,0 = −nO2 FDO2
θ ′ ( 0)
δO
2
Chapter 5. Development of Process Models
page 5: 40
O2 Evolution: O2+2H2O + 4e- → 4OHcoupled expression
iO2 =
V
Rt ,O2 +
δO
2
nO2 FDO2 cO2 ,0
1
bO2
⎛
1 ⎞
⎜ − θ′(0) ⎟
⎝
⎠
V
=
Rt ,O2 + zd ,O2
zd ,O2 =
δO
2
nO2 FDO2 cO2 ,0
Rt,O2 =
1
bO2
⎛
1 ⎞
⎜ − θ′(0) ⎟
⎝
⎠
1
K O2 bO2 cO2 ,0 exp −bO2V
(
)
Chapter 5. Development of Process Models
page 5: 41
Capacitance and Ohmic Contributions
Faradaic
Faradaic and
Charging
Ohmic
if = ∑if
~
~
if = ∑ if
dV
i = i f + Cd
dt
~
~ ~
i = i f + jωCdV
U = iRe + V
~ ~
~
U = i Re + V
Chapter 5. Development of Process Models
~
U
Z = ~ = Z r + jZ j
i
=
=
page 5: 42
Process Model
1
⎞
1
⎟+
+ j ωC d
⎟ Rt ,O + z d ,O
2
2
⎠
1
1
+ jωCd
+ z d ,O 2
⎛ 1
1
⎜
+
⎜ Rt,Fe Rt,H
2
⎝
1
+
Reff Rt ,O 2
1
1
1
=
+
Reff Rt,Fe Rt,H2
Zd,O2
Rt,Fe
Rt,H2
Cdl
Rt,O2
Chapter 5. Development of Process Models
page 5: 43
Development of Impedance Models
9
9
9
9
9
9
•
9
identify reaction mechanism
write expression for steady state current contributions
write expression for sinusoidal steady state
sum current contributions
account for charging current
account for ohmic potential drop
account for mass transfer
calculate impedance
Chapter 5. Development of Process Models
Mass Transfer
page 5: 44
Chapter 5. Development of Process Models
page 5: 45
Film Diffusion
⎧ ∂ 2 ci ⎫
∂ ci
= Di ⎨ 2 ⎬
∂t
⎩∂ z ⎭
steady state
ci → ci ,∞
as
z →δf
ci = ci ,0
at
z=0
ci = ci ,0 +
z
δf
(c
i ,∞
− ci ,0 )
Chapter 5. Development of Process Models
page 5: 46
Film Diffusion
⎧ ∂ 2 ci ⎫
∂ ci
= Di ⎨ 2 ⎬
∂t
⎩∂ z ⎭
ci = ci + Re{c~i e jωt }
jωt
jω ce
d 2 ci
d 2 ci jωt
= Di
+ Di
e
2
2
dz
dz
jωt
jω ce
d 2 ci jωt
= Di
e
2
dz
jω c = Di
d ci
d z2
2
ξ=
z
δi
Ki =
ωδ f2
Di
c
θi = i
ci (0)
d 2θi
=0
jK
θ
−
i
i
dξ2
Chapter 5. Development of Process Models
page 5: 47
Warburg Impedance
(
d 2θi
− jK iθi = 0
2
dξ
)
(
θi = A exp ξ jK i + B exp −ξ jK i
)
θi = 0 at ξ = 1
θi = 0 at ξ = ∞
θi = 1 at ξ = 0
θi = 1 at ξ = 0
tanh jK i
1
=−
θi′(0)
jK i
1
=−
θi′(0)
tanh
jωδ 2
Di
jωδ 2
Di
1
=−
θi′(0)
1
=−
θi′(0)
1
jK i
1
jωδ 2
Di
Chapter 5. Development of Process Models
page 5: 48
1.2
t=0.5nπ/K
1
Concentration
c(ξ)/c(∞)
t=0, 2nπ/K
0.8
t=1.5nπ/K
0.6
0.4
t=nπ/K
-40
0
Diffusion Impedance Only (infinite)
Diffusion Impedance Only (finite)
Complete Impedance
-30
0
0.5
1
1.5
2
ξ/δ
-20
1.2
1
-10
0
0
10
20
30
Zr, Zr,D, Ω
40
50
60
c(ξ)/c(∞)
Zj, Zj,D,
K=1
0.2
t=0, 2nπ/K
t=0.5nπ/K
0.8
0.6
t=1.5nπ/K
0.4
t=nπ/K
K=100
0.2
0
0
0.5
1
ξ/δ
1.5
2
Chapter 5. Development of Process Models
Rotating Disk
page 5: 49
Chapter 5. Development of Process Models
page 5: 50
Convective Diffusion
⎧ ∂ ⎛ 1 ∂ rci ⎞ ∂ 2ci ⎫
∂ ci
∂ ci
∂ ci
⎟⎟ +
+ vr
+ vz
= Di ⎨ ⎜⎜
2 ⎬
r
r
r
z
∂t
∂r
∂z
∂
∂
∂
⎠
⎩ ⎝
⎭
⎧⎪ aΩ 2 1 ⎛ Ω ⎞3 / 2 3 b ⎛ Ω ⎞2 4
⎫⎪
v z = ν Ω ⎨−
z + ⎜ ⎟ z + ⎜ ⎟ z + ...⎬
3⎝ν ⎠
6⎝ν ⎠
⎪⎩ ν
⎪⎭
⎧⎪ ⎛ Ω ⎞1 / 2 ⎛ Ω ⎞ z 2 b ⎛ Ω ⎞3 / 2 3
⎫⎪
vr = rΩ ⎨a ⎜ ⎟ z − ⎜ ⎟ − ⎜ ⎟ z + ...⎬
⎪⎩ ⎝ ν ⎠
⎪⎭
⎝ν ⎠ 2 3⎝ν ⎠
1/ 2
3/ 2
⎧⎪
⎫⎪
a ⎛Ω⎞
⎛Ω⎞
3
vθ = rΩ ⎨1 − b⎜ ⎟ z + ⎜ ⎟ z + ...⎬
3⎝ν ⎠
⎪⎩
⎪⎭
⎝ν ⎠
z
Chapter 5. Development of Process Models
page 5: 51
Convective Diffusion in one-Dimension
⎧ ∂ 2 ci ⎫
∂ ci
∂ ci
+ vz
= Di ⎨ 2 ⎬
∂t
∂z
⎩∂ z ⎭
ci → ci ,∞
zi
−
s
M
=
ne
∑i i
∂ ci sii f
Di
=
∂ z nF
i
as
i f = f (η , ci )
z→∞
at
z=0
Chapter 5. Development of Process Models
page 5: 52
Sinusoidal Steady State
ci = ci + Re{c~i e jωt }
jω ce
jω t
d ci
d ci jω t
d 2ci
d 2ci jω t
+ vz
+ vz
− Di
e − Di
e =0
2
2
dz
dz
dz
dz
d 2 c~i
d c~i
− vz
− jKi c~i = 0
2
dξ
dξ
ω ⎛ 9ν ⎞
Ki = ⎜⎜ 2 ⎟⎟
Ω ⎝ a Di ⎠
ξ=
z
δi
1
3
=
ω⎛ 9⎞
1
3
1/3
⎜ 2 ⎟ Sci
Ω⎝a ⎠
⎛ 3D ⎞
δi = ⎜ i ⎟
⎝ aν ⎠
1
3
ν
1
⎛ 3⎞ 3 1
=⎜ ⎟
Ω ⎝ a ⎠ Sc1/3
i
ν
Ω
Chapter 5. Development of Process Models
page 5: 53
Finite Length Warburg Impedance
∂ci
vz
=0
∂z
A=
2.598 ν1/ 3 Di2/ 3
Ω
z d = z d ( 0)
tanh
jωτ
jωτ
A 2 2.598 Sc1/ 3
=
τ=
Ω
Di
1
=−
θi′(0)
tanh
jωδ 2
Di
jωδ 2
Di
Chapter 5. Development of Process Models
page 5: 54
Impedance
~
~
d θi
dθi
~
− vz
− jKiθi = 0
2
dξ
dξ
2
θi (ξ ) = c~i c~i,0
~
~
θ i → 0 as ξ → ∞
~
θ i = 1 at ξ = 0
⎛ ∂f ⎞
δi
si
⎜
⎟
Z D = − Rt ∑ ⎜
~
⎟
∂
c
nFD
θ
i ⎝
i , 0 ⎠η ,c
i i ′(0 )
j , j ≠i
Z ( 0)
Z D = ~D
θ i ′(0)
Chapter 5. Development of Process Models
page 5: 55
Numerical Solutions
Infinite Sc
One Term
v z = νΩ ( − aζ
ζ=z
2
)
Ω
; a = 0.51203
ν
⎛
⎞
1
⎜
⎟
z d = z d ( 0)⎜ −
1/3 ⎟
⎝ θ ′0 ( pSc ) ⎠
p = ωΩ
Finite Sc
Two Terms
1 ⎞
⎛
v z = νΩ ⎜ − aζ 2 + ζ 3 ⎟
⎝
3 ⎠
Three Terms
1
b ⎞
⎛
v z = νΩ ⎜ − aζ 2 + ζ 3 + ζ 4 ⎟
⎝
3
6 ⎠
b = −0.616
⎛
Z1 ( pSc1/3 ) ⎞
1
⎟⎟
z d = z d ( 0)⎜⎜ −
+
1/3
1/3
Sc
⎝ θ ′0 ( pSc )
⎠
⎛
Z1 ( pSc1/3 ) Z2 ( pSc1/3 ) ⎞
1
⎟⎟
z d = z d ( 0)⎜⎜ −
+
+
1/3
2/3
1/3
Sc
Sc
⎝ θ ′0 ( pSc )
⎠
Chapter 5. Development of Process Models
page 5: 56
Coupled Diffusion Impedance
zd ,outer
zd =
Di ,outer δ i ,inner
zd ,inner
+
Di ,inner δ i ,outer
2
⎛
δ inner
zd ,inner zd ,outer ⎜⎜ jω
Di ,inner
⎝
⎞ Di ,outer δ i ,inner
⎟⎟ +
⎠ Di ,inner δ i ,outer
Chapter 5. Development of Process Models
page 5: 57
Interpretation Models for Impedance
Spectroscopy
• Models can account rigorously for proposed kinetic and
mass transfer mechanisms.
• There are significant differences between models for
mass transfer.
• Stochastic errors in impedance spectroscopy are
sufficiently small to justify use of accurate models for
mass transfer.
Chapter 5. Development of Process Models
page 5: 58
Chapter 6. Regression Analysis
Electrochemical Impedance
Spectroscopy
Chapter 6. Regression Analysis
•
Regression response surfaces
– noise
– incomplete frequency range
•
Adequacy of fit
– quantitative
– qualitative
© Mark E. Orazem, 2000-2008. All rights reserved.
page 6: 1
Chapter 6. Regression Analysis
page 6: 2
Test Circuit 1: 1 Time Constant
C1
•
•
•
R0 = 0
R1 = 1 Ω cm2
τ1 = τRC = 1 s
R0
(1)
R1
Chapter 6. Regression Analysis
page 6: 3
Linear optimization surface roughly
parabolic
N dat
f (p) = ∑
(Z
r ,dat
− Z r ,mod )
σ
i =1
2
2
r
N dat
+∑
k =1
(Z
j ,dat
− Z j ,mod )
2
σ 2j
1.5
0
0.02000
0.05
0.06000
τ/s
Sum of Squares
0.04000
0.04
0.03
0.08000
1.0
0.1000
0.02
0.01
1.4
1.2
1.0
τ/
0.8
0.00
0.6
0.8
1.0
2
R / Ω cm
1.2
0.6
1.4
s
0.5
0.5
1.0
R / Ω cm
1.5
2
Chapter 6. Regression Analysis
page 6: 4
Nonlinear Regression
∂f
f ( p) = f ( p0 ) + ∑
j =1 ∂p j
Np
1 p p ∂2 f
Δp j + ∑∑
2 j =1 k =1 ∂p j ∂pk
N
p0
N dat
For our purposes:
f =y=Z
xi = ωi
χ =∑
2
i =1
N
Δ p j Δ pk + …
p0
( yi − y ( xi | p))2
σ i2
β = α ⋅ Δp
N dat
βk = ∑
i =1
α j ,k
Variance of data
yi − y ( xi | p) ∂y ( xi | p)
∂pk
σ i2
1 ⎡ ∂y ( xi | p) ∂y ( xi | p) ⎤
≈∑ 2 ⎢
⎥
∂pk ⎥⎦
i =1 σ i ⎢
⎣ ∂p j
N dat
Derivative of
function with
respect to
parameter
Chapter 6. Regression Analysis
Methods for Regression
• Evaluation of derivatives
– method of steepest descent
– Gauss-Newton method
– Levenberg-Marquardt method
• Evaluation of function
– simplex
page 6: 5
Chapter 6. Regression Analysis
page 6: 6
Effect of Noisy Data
Add noise: 1% of modulus
1.5
1.000
75.75
τ/s
Sum of Squares
150.5
300
225.2
1.0
300.0
200
0.6
100
0.8
0
1.0
1.4
1.2
1.2
1.0
R / Ω cm
•
•
2
0.8
0.6
τ/s
1.4
response surface remains parabolic
value at minimum increases
0.5
0.5
1.0
1.5
2
R / Ω cm
Chapter 6. Regression Analysis
page 6: 7
Test Circuit 2: 3 Time Constants
•
•
•
•
•
•
•
R0 = 1 Ω cm2
R1 = 100 Ω cm2
τ1 = 0.001 s
R2 = 200 Ω cm2
τ2 = 0.01 s
R3 = 5 Ω cm2
τ3 = 0.05 s
R0
C1
C2
C3
(1)
(2)
(3)
R1
R2
R3
Note: 3rd Voigt element contributes only 1.66% to DC cell impedance.
Chapter 6. Regression Analysis
page 6: 8
Effect of Noisy Data
no noise
3
3
10
10
Sum of Squares
Sum of Squares
10
noise: 1% of modulus
2
10
1
10
0
10
-1
2
10
1
10
0
10
-2
10 4
10
-3
3
-4
-2
2
-1
1
2
log10(R/Ω cm )
-1
-2
10 4
3
2
1
0
0
1
-1
-2
2
log10(τ / s)
2
log10(R/Ω cm )
-1
-2
-3
-4
0
0
1
-1
-2
Note: use of log scale for parameters
All parameters fixed except R3 and τ3
2
log10(τ / s)
Chapter 6. Regression Analysis
page 6: 9
Resulting Spectrum
Zj / Ω cm
2
-150
-100
-50
0
0
50
100
150
200
Zr / Ω cm
−
250
300
2
Model with 1% noise added
Model with no noise
350
Chapter 6. Regression Analysis
page 6: 10
Test Circuit 3: 3 Time Constants
•
•
•
•
•
•
•
R0 = 1 Ω cm2
R1 = 100 Ω cm2
τ1 = 0.01 s
R2 = 200 Ω cm2
τ2 = 0.1 s
R3 = 100 Ω cm2
τ3 = 10 s
R0
C1
C2
C3
(1)
(2)
(3)
R1
R2
R3
Note: 3rd Voigt element contributes 25% to DC cell impedance. The time
constant corresponds to a characteristic frequency ω3=0.1 s-1 or f3=0.016 Hz.
Chapter 6. Regression Analysis
page 6: 11
Zj / Ω cm
2
Resulting Test Spectra
-100
0
0
100
200
Zr / Ω cm
300
2
0.01 Hz to 100 kHz
1 Hz to 100 kHz
400
Chapter 6. Regression Analysis
page 6: 12
Effect of Truncated Data
0.01 Hz to 100 kHz
10
3
10
Sum of Squares
Sum of Squares
10
1 Hz to 100 kHz
2
10
1
3
10
2
10
1
10
0
-2
-1
-2
-1
0
0
10 5
4
1
3
2
2
1
2
log10(R / Ω cm )
3
0
-1
4
log10(τ / s)
0
-1
10 5
4
1
3
2
2
1
2
log10(R / Ω cm )
3
0
All parameters fixed except R3 and τ3
-1
4
log10(τ / s)
Chapter 6. Regression Analysis
page 6: 13
Conclusions from Test Spectra
• The presence of noise in data can have a direct
impact on model identification and on the confidence
interval for the regressed parameters.
• The correctness of the model does not determine the
number of parameters that can be obtained.
• The frequency range of the data can have a direct
impact on model identification.
• The model identification problem is intricately linked
to the error identification problem. In other words,
analysis of data requires analysis of the error
structure of the measurement.
Chapter 6. Regression Analysis
When Is the Fit Adequate?
• Chi-squared statistic
– includes variance of data
– should be near the degree of freedom
• Visual examination
– should look good
– some plots show better sensitivity than others
• Parameter confidence intervals
– based on linearization about solution
– should not include zero
page 6: 14
Chapter 6. Regression Analysis
page 6: 15
Test Case: Mass Transfer to a RDE
Z (ω ) = Re +
R t + z d (ω )
1 + ( jω C ) ( Rt + z d (ω ) )
Single reaction coupled with mass transfer. Consider
model for a Nernst stagnant diffusion layer:
z d (ω ) = z d (ω )
tanh
jωτ
jωτ
Chapter 6. Regression Analysis
page 6: 16
Evaluation of χ2 Statistic
σ/|Z(ω)|
1
0.1
0.05
0.03
0.01
χ2
0.0408
4.08
16.32
45.32
408
χ2/ν
0.00029
0.029
0.12
0.32
2.9
Chapter 6. Regression Analysis
page 6: 17
Comparison of Model to Data
Impedance Plane (Nyquist)
−Zj / Ω
80
60
40
20
0
0
20
40
60
80 100 120 140 160 180 200
Zr / Ω
Value of χ2 has no meaning without accurate assessment
of the noise level of the data
Chapter 6. Regression Analysis
page 6: 18
Modulus
|Z| / Ω
100
10
10
-2
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 19
Phase Angle
φ / degrees
-45
-30
-15
0
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 20
Real
200
Zr / Ω
160
120
80
40
0
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 21
Imaginary
80
−Zj / Ω
60
40
20
0
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 22
Log Imaginary
100
−Zj / Ω
Slope = -1
for RC
10
1
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 23
Modified Phase Angle
-90
⎛ Zj ⎞
φ * = tan ⎜
⎟
−
Z
R
e ⎠
⎝ r
−1
-60
-45
∗
φ / degrees
-75
-30
-15
0
-2
10
-1
10
10
0
10
1
10
f / Hz
2
3
10
10
4
Chapter 6. Regression Analysis
page 6: 24
Real Residuals
0.06
0.04
εr / Zr
0.02
0
-0.02
±2σ noise level
-0.04
-0.06
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 25
Imaginary Residuals
0.3
0.2
εj / Zj
0.1
0
-0.1
±2σ noise level
-0.2
-0.3
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 26
Plot Sensitivity to Quality of Fit
•
Poor Sensitivity
– Modulus
– Real
•
Modest Sensitivity
– Impedance-plane
• only for large impedance values
– Imaginary
– Log Imaginary
• emphasizes small values
• slope suggests new models
– Phase Angle
• high-frequency behavior is counterintuitive due to role of solution resistance
– Modified Phase Angle
• high-frequency behavior can suggest new models
• needs an accurate value for solution resistance
•
Excellent Sensitivity
– Residual error plots
• trending provides an indicator of problems with the regression
Chapter 6. Regression Analysis
page 6: 27
Test Case: Better Model for Mass
Transfer to a RDE
Z (ω ) = Re +
Rt + z d ( ω )
1 + ( jω ) Q ( R t + z d ( ω ) )
α
Consider 3-term expansion with CPE to account for
more complicated reaction kinetics:
1/3
1/3
⎛
⎞
Z
p
Sc
Z
p
Sc
)
)
1
1(
2(
⎟
+
+
zd = zd (0) ⎜ −
1/3
2/3
1/3
⎜ θ 0′ ( pSc )
⎟
Sc
Sc
⎝
⎠
χ2/ν=4.86
Chapter 6. Regression Analysis
page 6: 28
Comparison of Model to Data
Impedance Plane (Nyquist)
−Zj / Ω
80
60
40
20
0
0
20
40
60
80 100 120 140 160 180 200
Zr / Ω
Chapter 6. Regression Analysis
page 6: 29
Phase Angle
-45
−Zj / Ω
-30
-15
0
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 30
Modified Phase Angle
-90
⎛ Zj ⎞
φ * = tan ⎜
⎟
−
Z
R
e ⎠
⎝ r
−1
-60
-45
*
φ / degrees
-75
-30
-15
0
-2
10
10
-1
10
0
10
1
10
f / Hz
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 31
Log Imaginary
−Zj / Ω
100
10
1
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 32
Real Residuals
0.006
εr / Zr
0.003
0
-0.003
±2σ
-0.006
-2
10
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
Chapter 6. Regression Analysis
page 6: 33
Imaginary Residuals
0.02
εj / Zj
0.01
0
-0.01
±2σ
-0.02
-2
10
10
-1
10
0
10
1
f / Hz
10
2
3
10
10
4
Chapter 6. Regression Analysis
page 6: 34
Confidence Intervals
• Based on linearization about trial solution
• Assumption valid for good fits
– for normally distributed fitting errors
– small estimated standard deviations
• Can use Monte Carlo simulations to test assumptions
Chapter 6. Regression Analysis
page 6: 35
Regression of Models to Data
• Regression is strongly influenced by
– stochastic errors in data
– incomplete frequency range
– incorrect or incomplete models
• Some plots more sensitive to fit quality than others.
• Quantitative measures of fit quality require
independent assessment of error structure.
• The model identification problem is intricately linked
to the error identification problem.
Chapter 6. Regression Analysis
page 6: 36
Chapter 7. Error Structure
page 7: 1
Electrochemical Impedance
Spectroscopy
Chapter 7. Error Structure
•
•
•
•
Contributions to error structure
Weighting strategies
General approach for error analysis
Experimental results
© Mark E. Orazem, 2000-2008. All rights reserved.
Chapter 7. Error Structure
page 7: 2
Error Analysis Increasingly Important
•
Improved Instrumentation
– improved signal-to-noise
– more data
– more detailed interpretation of data possible
•
New experimental techniques
– more ways to study a system
– proper weight must be assigned to each experiment
– error analysis used to improve experimental design
•
Improved computational speed
– increased use of regression
– increased use of detailed models
Chapter 7. Error Structure
Contributions to Error Structure
•
Sampling Errors
•
•
Stochastic Phenomena
Bias Errors
– Lack of Fit
– Changing baseline (non-stationary processes)
– Instrumental artifacts
page 7: 3
Chapter 7. Error Structure
page 7: 4
Time-domain Æ Frequency Domain
1 mHz
10 Hz
100 Hz
10 kHz
Chapter 7. Error Structure
page 7: 5
Error Structure
ε resid (ω ) = Z obs (ω ) − Z model (ω )
= ε fit (ω ) + ε bias (ω ) + ε stochastic (ω )
fitting error
inadequate model
noise (frequency domain)
experimental errors: inconsistent
with the Kramers-Kronig relations
Chapter 7. Error Structure
page 7: 6
Weighting Strategies
J=∑
( Z r ,k − Z r ,k ) 2
k
σr ,k
Strategy
No Weighting
Modulus Weighting
Proportional Weighting
Experimental
Refined Experimental
2
+∑
k
( Z j ,k − Z j ,k ) 2
σ j ,k 2
Implications
σr=σj
σ=α
σr=σj
σ = α|Ζ|
σr≠σj
σr = αr|Ζr|; σj = αj|Ζj|
σr=σj
σ = α|Ζj| + β|Ζr| + γ|Ζ|2/Rm
σr=σj
σ = α|Ζj| + β|Ζr-Rsol| + γ|Ζ|2/Rm+δ
Chapter 7. Error Structure
page 7: 7
Assumed Error Structure often Wrong
100000
6 Repeated Measurements
10000
Impedance,
Real
1000
3% of |Z|
1% of |Z|
100
Imaginary
10
1
0.1
1
10
100
1000
10000 100000
Frequency, Hz
Data obtained by T. El Moustafid, CNRS, Paris, France
Chapter 7. Error Structure
page 7: 8
Reduction of Fe(CN)63- on a Pt Disk, 120 rpm
-300
I/ilim
1/4
1/2
3/4
Zj, Ω
-200
-100
0
0
100
200
Zr, Ω
300
400
500
Chapter 7. Error Structure
page 7: 9
Reduction of Fe(CN)63- on a Pt Disk,
Imaginary Replicates @ 120 rpm, 1/4 ilim
-80
Zj,
-60
-40
-20
0
0.01
0.1
1
10
100
Frequency, Hz
1000
10000 100000
Chapter 7. Error Structure
page 7: 10
Reduction of Fe(CN)63- on a Pt Disk,
Real Replicates @ 120 rpm, 1/4 ilim
1000
Zr,
100
10
1
0.01
0.1
1
10
100
Frequency, Hz
1000
10000 100000
Chapter 7. Error Structure
page 7: 11
Reduction of Fe(CN)63- on a Pt Disk,
Error Structure @ 120 rpm, 1/4 ilim
Standard Deviation,
10
1
0.1
0.01
0.001
0.01
0.1
1
10
100
Frequency, Hz
1000
10000 100000
Chapter 7. Error Structure
page 7: 12
Reduction of Fe(CN)63- on a Pt Disk,
Error Structure @ 120 rpm, 1/4 ilim
100
/|Z|, Percent
10
1
0.1
0.01
0.01
0.1
1
10
100
Frequency, Hz
1000
10000 100000
Chapter 7. Error Structure
page 7: 13
Interpretation of Impedance Spectra
• Need physical insight and knowledge of error structure
– stochastic component
• weighting
• determination of model adequacy
• experimental design
– bias component
• suitable frequency range
• experimental design
• Approach is general
– electrochemical impedance spectroscopies
– optical spectroscopies
– mechanical spectroscopies
Chapter 7. Error Structure
page 7: 14
Chapter 8. Kramers-Kronig Relations
Electrochemical Impedance
Spectroscopy
Chapter 8. Kramers-Kronig Relations
•
•
•
Mathematical form and interpretation
Application to noisy data
Methods to evaluate consistency
© Mark E. Orazem, 2000-2008. All rights reserved.
page 8: 1
Chapter 8. Kramers-Kronig Relations
page 8: 2
Contraints
• Under the assumption that the system is
– Causal
– Linear
– Stable
• A complex variable Z must satisfy equations of the
∞
form:
2ω ⌠ Z r ( x) − Z r (ω )
Z j (ω ) =
−
dx
⎮
2
2
x −ω
π ⌡
0
∞
2ω ⌠ − xZ j ( x) + ωZ j (ω )
Z r (ω ) = Z r (∞) +
dx
−
⎮
2
2
x −ω
π ⌡
0
Chapter 8. Kramers-Kronig Relations
Use of Kramers-Kronig Relations
• Concept
– if data do not satisfy Kramers-Kronig relations, a
condition of the derivation must not be satisfied
• stationarity / causality
• linearity
• stability
– interpret result in terms of
• instrument artifact
• changing baseline
– if data satisfy Kramers-Kronig relations, conditions of
the derivation may be satisfied
page 8: 3
Chapter 8. Kramers-Kronig Relations
page 8: 4
For real data (with noise)
Z ob (ω ) = Z (ω ) + ε (ω )
= ( Z r (ω ) + ε r (ω )) + j ( Z j (ω ) + ε j (ω ))
where
ε (ω ) = ε r (ω ) + jε j (ω )
E (Z (ω ) ob ) = Z (ω )
If and only if
E (ε (ω ) ) = 0
Kramers-Kronig in an expectation sense
⎛∞
⎞
2ω ⎜⌠ Z r ( x) − Z r (ω ) + ε r ( x) − ε r (ω )
⎟
−
E (Z j (ω ) ) =
E ⎜⎮
dx
⎟⎟
π ⎜⌡
x2 − ω 2
⎝0
⎠
⎛ ∞ − xZ ( x) + ωZ (ω ) − xε ( x) + ωε (ω )
⎜2
j
j
j
j
−
E (Z r (ω ) − Z r (∞) ) = E ⎜ ⌠
dx
⎮
2
2
−
x
π
ω
⌡
⎜
⎝ 0
⎞
⎟
⎟⎟
⎠
Chapter 8. Kramers-Kronig Relations
page 8: 5
The Kramers-Kronig relations can be
satisfied if
E (ε (ω ) ) = 0
•
and
⎛ 2ω ∞ ε ( x)
⎞
⎜
⎟=0
⌠
r
E⎜
− 2
dx
⎮
⎟⎟
⎜ π ⌡ x −ω 2
0
⎝
⎠
This means
– the process must be stationary in the sense of replication at every
measurement frequency.
– As the impedance is sampled at a finite number of frequencies, εr(x)
represents the error between an interpolated function and the “true”
impedance value at frequency x. In the limit that quadrature and
interpolation errors are negligible, the residual errors εr(x) should be
of the same magnitude as the stochastic noise εr(ω).
Chapter 8. Kramers-Kronig Relations
Meaning of
⎛ 2ω ⌠∞ ε ( x )
E ⎜ ⎮⎮− 2 r 2 dx
⎜ π ⌡ x −ω
0
⎝
⎞
⎟=0
⎟
⎠
page 8: 6
Correct Value
2
2
(Zr(x)-Zr(ω)) / (x -ω )
0
2
(Zr(x)-Zr(ω)) / (x -ω )
0
2
-200
-100
Interpolated Value
-200
-300
-400
-400
0.2
-600
0.5
f / Hz
-800
-1000
10
-4
10
-3
10
-2
10
-1
10
0
10
1
f / Hz
10
2
10
3
10
4
10
5
1
Chapter 8. Kramers-Kronig Relations
Use of Kramers-Kronig Relations
• Quadrature errors
– require interpolation function
• Missing data at low and high frequency
page 8: 7
Chapter 8. Kramers-Kronig Relations
page 8: 8
Methods to Resolve Problems of Insufficient
Frequency Range
• Direct Integration
– Extrapolation
• single RC
• polynomials
• 1/ω and ω asymptotic behavior
– simultaneous solution for missing data
• Regression
– proposed process model
– generalized measurement model
Chapter 8. Kramers-Kronig Relations
page 8: 9
Chapter 9. Use of Measurement Models
Electrochemical Impedance
Spectroscopy
Chapter 9. Use of Measurement Models
•
•
•
Generalized model
Identification of stochastic component of error structure
Identification of bias component of error structure
© Mark E. Orazem, 2000-2008. All rights reserved.
page 9: 1
Chapter 9. Use of Measurement Models
page 9: 2
Approach
• Experimental design
– quality (signal-to-noise, bias errors)
– information content
• Process model
– account for known phenomena
– extract information concerning other phenomena
• Regression
– uncorrupted frequency range
– weighting strategy
• Error analysis - measurement model
– stochastic errors
– bias errors
Chapter 9. Use of Measurement Models
page 9: 3
Error Structure
Z obs − Z model = ε res
Z obs − Z model = ε fit + ε bias + ε stoch
• Stochastic errors
• Bias errors
– lack of fit
– experimental artifact
• Kramers-Kronig consistent
• Kramers-Kronig inconsistent
Chapter 9. Use of Measurement Models
page 9: 4
Measurement Model
•
Superposition of lineshapes
n
Rk
Z = R0 + ∑
k =1 1 + jω Rk Ck
Chapter 9. Use of Measurement Models
page 9: 5
Identification of Stochastic Component
of Error Structure
How?
•
•
Replicate impedance scans.
Fit measurement model to
each scan:
– use modulus or noweighting options.
– same number of
lineshapes.
– parameter estimates do
not include zero.
•
•
Calculate standard deviation
of residual errors.
Fit model for error structure.
Why?
•
•
•
Weight regression.
Identify good fit.
Improve experimental
design.
Chapter 9. Use of Measurement Models
page 9: 6
Replicated Measurements
-Zj / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 7
1 Voigt Element
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 8
2 Voigt Elements
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 9
3 Voigt Elements
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 10
4 Voigt Elements
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 11
5 Voigt Elements
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 12
6 Voigt Elements
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 13
10 Voigt Elements
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 14
0.03
0
-0.03
0.01
0.1
1
10
100
1000
10000 100000
Frequency / Hz
0.005
real
εr / Zr
Residual
Errors
εj / Zj
imaginary
0
-0.005
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 15
Residual Sum of Squares
1000000
100000
2 2
(ε
Σ /σ )
10000
1000
100
10
1
0.1
1
3
5
7
# Voigt Elements
9
11
Chapter 9. Use of Measurement Models
page 9: 16
Fit to Repeated Data Sets
-Z j / Ω
100
50
0
0
50
100
Zr / Ω
150
200
Chapter 9. Use of Measurement Models
page 9: 17
Residual Errors
Real
εr / Z r
0.005
0
-0.005
0.01
0.1
1
10
100
1000
Frequency / Hz
10000 100000
Chapter 9. Use of Measurement Models
page 9: 18
Standard Deviation of Residual Errors
Imaginary
εj / Z j
0.02
0
-0.02
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 19
Standard Deviation
Standard Deviation,
10
Imaginary
Real
direct calculation of
standard deviation
1
0.1
0.01
standard deviation obtained
from measurement model
analysis
0.001
0.01
0.1
1
10
100
Frequency, Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 20
Comparison to Impedance
1000
Real
Imaginary
3% of |Z|
100
Z or ,
10
1
0.1
0.01
0.001
0.01
0.1
1
10
100
Frequency, Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 21
Identification of Bias Component
of Error Structure
How?
•
Fit measurement model to real
component:
– predict imaginary component.
– Use Monte Carlo calculations to
estimate confidence interval.
•
Fit measurement model to
imaginary component:
– predict real component.
– Use Monte Carlo calculations to
estimate confidence interval.
Why?
•
•
Identify suitable
frequency range for
regression.
Improve experimental
design.
Chapter 9. Use of Measurement Models
page 9: 22
1st of Repeated Measurements
Imaginary
-80
Zj /
-60
-40
-20
0
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 23
1st of Repeated Measurements
Real
1000
Zr /
100
10
1
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 24
Fit to Imaginary Part
-Z j / Ω
100
50
0
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 25
Fit to Imaginary Part
εj / Z j
0.03
0
-0.03
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 26
Predict Real Part
200
190
150
Zr / Ω
170
100
150
0.01
0.1
50
0
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
page 9: 27
Predict Real Part
εr / Z r
0.03
0
-0.03
0.01
0.1
1
10
100
Frequency / Hz
1000
10000 100000
Chapter 9. Use of Measurement Models
Validation of Measurement Model
Approach
page 9: 28
Chapter 9. Use of Measurement Models
page 9: 29
The error structure identified should
be independent of measurement model
used
Voigt:
N
Ri
Z (ω) = R0 + ∑
i =1 1+ ( jω)τ i
M
Transfer
Function:
∑b ( jω)
ni
Z (ω) =
i =0
P
i
nj
a
(
j
)
ω
∑j
n = 1/ 2
j =0
b0 + b1( jω)1/ 2 + b2 ( jω) +…+ bM ( jω)M / 2
Z (ω) =
;
1/ 2
P/ 2
a0 + a1( jω) + a2 ( jω) +…+ ( jω)
M = P; aP = 1
Chapter 9. Use of Measurement Models
page 9: 30
Convective Diffusion to a RDE
Reduction of Fe(CN)63- on a Pt Disk: i/ilim = ¼; 120 rpm
-80
0
0.33
0.66
1.0
1.34
1.67
1.99
2.33
Zj / Ω
-60
-40
-20
8.93
9.25
9.58
9.91
0.15 Hz
0.0.022 Hz
0
0
40
80
120
Zr / Ω
160
200
Chapter 9. Use of Measurement Models
page 9: 31
Convective Diffusion to a RDE
Reduction of Fe(CN)63- on a Pt Disk: i/ilim = ¼; 120 rpm
real part
imaginary part
-80
200
Zr / Ω
160
120
80
8.93
9.25
9.58
9.91
-70
0
0.33
0.66
1.0
1.34
1.67
1.99
2.33
-60
-50
Zj / Ω
0
0.33
0.66
1.0
1.34
1.67
1.99
2.33
-40
-30
8.93
9.25
9.58
9.91
-20
40
-10
0
0
10-2
10-1
100
101
102
f / Hz
103
104
105
10-2
10-1
100
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 32
Data Sets for Analysis
-86
1
2
measurement
before impedance scan
after impedance scan
3
2
4
10
Current / mA
-87
-88
-89
-90
-91
-92
0
6
time / h
8
Chapter 9. Use of Measurement Models
page 9: 33
Regression Results for Set #1:
0-1 h
•
Data:
-86
– 74 frequencies
– 148 data points
Voigt Model:
– 10 elements + Re
– 21 parameters
•
Transfer Function:
– 5 ai + 6 bi
– 11 parameters
Current / mA
•
1
2
3
-87
-88
-89
-90
-91
-92
0
2
4
6
time / h
8
10
Chapter 9. Use of Measurement Models
page 9: 34
Stochastic Error Structure for Set #1:
Voigt
10-1
r
j
σZ , σZ / Ω
100
10-2
10-3
10-2
real imag
direct
VMM
10-1
100
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 35
Stochastic Error Structure for Set #1:
Voigt & Transfer Function
σZ , σZ / Ω
r
j
100
10-1
10-2
10-3
10-2
real imag
direct
VMM
10-1
100
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 36
Regression Results for Set #3:
8.9-9.9 h
•
Data:
-86
– 74 frequencies
– 148 data points
Voigt Model:
– 9 elements + Re
– 19 parameters
•
Transfer Function:
– 5 ai + 6 bi
– 11 parameters
Current / mA
•
1
2
3
-87
-88
-89
-90
-91
-92
0
2
4
6
time / h
8
10
Chapter 9. Use of Measurement Models
page 9: 37
Stochastic Error Structure for Set #3:
Voigt
σZ , σZ / Ω
r
j
100
10-1
10-2
10-3
10-2
real imag
VMM
10-1
100
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 38
Stochastic Error Structure for Set #3:
Voigt & Transfer Function
σZ , σZ / Ω
r
j
100
10-1
10-2
10-3
10-2
real imag
TMM
VMM
10-1
100
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 39
Identification of Stochastic Component
of Error Structure
• Direct evaluation of standard deviation includes
significant contributions from changes in system
behavior
• The error structure identified was independent of
measurement model used
• Selection of measurement model
– Ease of identification of initial parameters → Voigt
– Number of parameters → Transfer Function
Chapter 9. Use of Measurement Models
page 9: 40
Evaluation of Consistency with the
Kramers-Kronig relations
• Approach
–
–
–
–
–
Fit measurement model to imaginary component
Use experimental variance to weight regression
Predict real component
Compare prediction to measured data
Use Monte Carlo calculations to estimate confidence interval
• Assumption
– Measurement model satisfies the Kramers-Kronig relations
Chapter 9. Use of Measurement Models
page 9: 41
Voigt Measurement Model: Data 1
Fit to Imaginary
Prediction of Real
0.04
(Zr-Zr,mod) / Zr,mod
(Zj-Zj,mod) / Zj,mod
0.02
0.01
0
-0.01
0.02
0
-0.02
-0.04
-0.02
10-2
10-1
100
101
102
103
104
105
10-2
10-1
100
f / Hz
•
•
•
20 parameters, guessed value for Re
Tight confidence interval at low frequency
Justify deleting 5 data points at lowest frequency
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 42
Voigt Measurement Model: Data 5
Fit to Imaginary
Prediction of Real
0.04
(Zr-Zr,mod) / Zr,mod
(Zj-Zj,mod) / Zj,mod
0.010
0.005
0
-0.005
-0.010
10
0
-0.02
-0.04
-2
10
-1
10
0
10
1
10
2
10
3
10
4
10
5
f / Hz
•
•
0.02
20 parameters, guessed value for Re
Justify keeping all data points
10-2
10-1
100
101
102
f / Hz
103
104
105
Chapter 9. Use of Measurement Models
page 9: 43
Interpretation of Impedance Spectra
• Physical insight and knowledge of error structure
– stochastic component
• weighting
• determination of model adequacy
• experimental design
– bias component
• suitable frequency range
• experimental design
• Measurement model approach is general
– electrochemical impedance spectroscopies
– optical spectroscopies
– mechanical spectroscopies
Chapter 9. Use of Measurement Models
page 9: 44
Chapter 10. Conclusions
page 10: 1
Electrochemical Impedance
Spectroscopy
Chapter 10. Conclusions
• Overview of Course
• Credits
© Mark E. Orazem, 2000-2008. All rights reserved.
Chapter 10. Conclusions
page 10: 2
Overview of Course
•
•
•
•
•
•
•
•
•
•
•
•
Chapter 1. Introduction
Chapter 2. Motivation
Chapter 3. Impedance Measurement
Chapter 4. Representations of Impedance Data
Chapter 5. Development of Process Models
Chapter 6. Regression Analysis
Chapter 7. Error Structure
Chapter 8. Kramers-Kronig Relations
Chapter 9. Use of Measurement Models
Chapter 10. Conclusions
Chapter 11. Suggested Reading
Chapter 12. Notation
Chapter 10. Conclusions
page 10: 3
Impedance Spectroscopy
•
•
•
Electrochemical measurement of macroscopic properties
Example of a generalized transfer-function measurement
Can be used to extract contributions of
– electrode reactions
– mass transfer
– surface layers
•
Can be used to estimate
– reaction rates
– transport properties
•
Interpretation of data
–
–
–
–
graphical representations
regression
process models
error analysis
Chapter 10. Conclusions
Integrated Approach
page 10: 4
Chapter 10. Conclusions
•
Acknowledgements
page 10: 5
Students
– University of Florida
• P. Agarwal, M. Durbha, S. Carson, M. Membrino, P. Shukla, V. Huang, S. Roy, B. Hirschorn,
S-L Wu
– CNRS
• T. El Moustafid, I. Frateur, H. G. de Melo
– CIRIMAT
• J-B Jorcin
•
Collaborators
– University of South Florida
• L. García-Rubio
– University of Florida
• O. Crisalle
– CNRS, Paris
• B. Tribollet, C. Deslouis, H. Takenouti, V. Vivier
– CIRIMAT, Toulouse
• N. Pébère
– CNR, Italy
• M. Musiani
•
Funding
– NSF, ONR, SC Johnson, CNRS, NASA
•
Other
– The Electrochemical Society
– The Fuel Cell Seminar
Chapter 10. Conclusions
page 10: 6
Chapter 11. Suggested Reading
Electrochemical Impedance
Spectroscopy
Chapter 11. Suggested Reading
•
•
•
•
•
•
General
Process Models
Orazem group work on Fuel Cells
Measurement Models
CPE
Plotting
© Mark E. Orazem, 2000-2008. All rights reserved.
page 11: 1
Chapter 11. Suggested Reading
page 11: 2
Suggested Reading
General
•
J. R. Macdonald, editor, Impedance Spectroscopy Emphasizing Solid
Materials and Analysis, John Wiley and Sons, New York, 1987.
•
E. Barsoukov and J. R. Macdonald, editors, Impedance Spectroscopy:
Theory, Experiment, and Applications, 2nd Edition, John Wiley and
Sons, New York, 2005.
•
C. Gabrielli, Use and Applications of Electrochemical Impedance
Techniques, Technical Report, Schlumberger, Farnborough, England,
1990.
•
D. Macdonald, Transient Techniques in Electrochemistry, Plenum
Press, NY, 1977.
•
M. E. Orazem and B. Tribollet, Electrochemical
Spectroscopy, John Wiley and Sons, New York, 2008.
•
Other Sources
– See instrument vendor websites for for application notes.
Impedance
Chapter 11. Suggested Reading
page 11: 3
Suggested Reading
Process Models
•
•
•
•
A. Lasia, “Electrochemical Impedance Spectroscopy and Its
Applications,” Modern Aspects of Electrochemistry, 32, R. E. White, J.
O'M. Bockris and B. E. Conway, editors, Plenum Press, New York,
1999, 143-248.
C. Deslouis and B. Tribollet, Flow Modulation Techniques in
Electrochemistry, Advances in Electrochemical Science and
Engineering, 2, H. Gerischer and C. W. Tobias, editors, VCH,
Weinheim, 1992, 205-264.
M. E. Orazem, “Tutorial: Application of Mathematical Models for
Interpretation of Impedance Spectra,” Tutorials in Electrochemical
Engineering - Mathematical Modeling, PV 99-14, R.F. Savinell, A.C.
West, J.M. Fenton and J. Weidner, editors, Electrochemical Society,
Inc., Pennington, N.J., 68-99, 1999.
B. Tribollet, Look-up Tables for Rotating Disk Electrode, April 28, 2000,
http://www.ccr.jussieu.fr/lple/EnglishVersion.html
Chapter 11. Suggested Reading
page 11: 4
Suggested Reading
Orazem group work on Fuel Cells
•
•
•
•
S. K. Roy and M. E. Orazem, “Error Analysis of the Impedance
Response of PEM Fuel Cells,” Journal of the Electrochemical Society,
154 (2007), B883-B891
S. K. Roy and M. E. Orazem, “Deterministic Impedance Models for
Interpretation of Low-Frequency Inductive Loops in PEM Fuel Cells,” in
Proton Exchange Membrane Fuel Cells 6, T. Fuller, C. Bock, S.
Cleghorn, H. Gasteiger, T. Jarvi, M. Mathias, M. Murthy, T. Nguyen, V.
Ramani, E. Stuve, T. Zawodzinski, editors, ECS Transactions, 3:1
(2006), 1031-1040.
S. K. Roy and M. E. Orazem, “Stochastic Analysis of Flooding in PEM
Fuel Cells by Electrochemical Impedance Spectroscopy,” in Proton
Exchange Membrane Fuel Cells 7, T. Fuller, H. Gasteiger, S. Cleghorn,
V. Ramani, T. Zhao, T. Nguyen, A. Haug, C. Bock, C. Lamy, and K.
Ota, editors, Electrochemical Society Transactions, 11:1 (2007), 485495.
S. K. Roy, M. E. Orazem, and B. Tribollet “Interpretation of LowFrequency Inductive Loops in PEM Fuel Cells,” Journal of the
Electrochemical Society, 154 (2007), B1378-B1388.
Chapter 11. Suggested Reading
page 11: 5
Suggested Reading
CPE
•
•
•
•
G. J. Brug, A. L. G. van den Eeden, M. Sluyters-Rehbach, and J. H.
Sluyters, “The Analysis of Electrode Impedances Complicated by the
Presence of a Constant Phase Element,” Journal of Electroanalytic
Chemistry, 176 (1984), 275-295.
V. Huang, V. Vivier, M. Orazem, N. Pébère, and B. Tribollet, “The
Apparent CPE Behavior of an Ideally Polarized Blocking Electrode: A
Global and Local Impedance Analysis,” Journal of the Electrochemical
Society, 154 (2007), C81-C88.
V. Huang, V. Vivier, M. Orazem, I. Frateur, and B. Tribollet, “The Global
and Local Impedance Response of a Blocking Disk Electrode with
Local CPE Behavior,” Journal of the Electrochemical Society, 154
(2007), C89-C98.
V. Huang, V. Vivier, M. Orazem, N. Pébère, and B. Tribollet, “The
Apparent CPE Behavior of a Disk Electrode with Faradaic Reactions: A
Global and Local Impedance Analysis,” Journal of the Electrochemical
Society, 154 (2007), C99-C107.
Chapter 11. Suggested Reading
page 11: 6
Suggested Reading
Measurement Models
•
•
•
•
P. Agarwal, M. E. Orazem, and L. H. García-Rubio, "Measurement
Models
for
Electrochemical
Impedance
Spectroscopy:
1.
Demonstration of Applicability," Journal of the Electrochemical
Society, 139 (1992), 1917-1927.
P. Agarwal, Oscar D. Crisalle, M. E. Orazem, and L. H. García-Rubio,
"Measurement Models for Electrochemical Impedance Spectroscopy:
2. Determination of the Stochastic Contribution to the Error Structure,"
Journal of the Electrochemical Society, 142 (1995), 4149-4158.
P. Agarwal, M. E. Orazem, and L. H. García-Rubio, "Measurement
Models for Electrochemical Impedance Spectroscopy: 3. Evaluation of
Consistency with the Kramers-Kronig Relations,” Journal of the
Electrochemical Society, 142 (1995), 4159-4168.
M. E. Orazem “A Systematic Approach toward Error Structure
Identification for Impedance Spectroscopy,” Journal of
Electroanalytical Chemistry, 572 (2004), 317-327.
Chapter 11. Suggested Reading
page 11: 7
Suggested Reading
Plotting
•
M. Orazem, B. Tribollet, and N. Pébère, “Enhanced Graphical
Representation of Electrochemical Impedance Data,” Journal of the
Electrochemical Society, 153 (2006), B129-B136.
Electrochemical Impedance
Spectroscopy
Chapter 12. Notation
• Roman
• Greek
Chapter 12. Notation
Roman
a
coefficient in the Cochran expansion for velocity, a = 0.51023
b
coefficient in the Cochran expansion for velocity, b = -0.61592
ci
concentration of reacting species i , mol/cm3
ci
steady-state value of the concentration of reacting species i , mol/cm3
ci
Oscillating component of the concentration of reacting species i , mol/cm3
ci ,o
concentration of species i on the electrode surface, mol/cm3
ci ,o
steady-state value of the concentration of species i on the electrode surface, mol/cm3
ci ,o
Oscillating component of the concentration of species i on the electrode surface, mol/cm3
c∞
bulk concentration of the reacting species, mol/cm3
Cd
double layer capacitance, F/cm2
C dl
double layer capacitance, F/cm2
Di
diffusion coefficient of species i , cm2/s
f
arbitrary function, e.g., i f = f (V , ci )
F
Faraday’s constant, C/equiv
i
Total current density, A/cm2
i
Steady-state total current density, A/cm2
page 12: 2
Chapter 12. Notation
page 12: 3
i
Oscillating component of total current density, A/cm2
if
Faradic current density, A/cm2
if
Steady-state Faradic current density, A/cm2
if
Oscillating component of Faradic current density, A/cm2
i0
Exchange current density, A/cm2
j
imaginary number,
kA
rate constant for reaction identified by index A (units depend on reaction stoichiometry)
−1
ω ⎛ 9ν ⎞
1
3
1
3
K
dimensionless frequency, Ki =
Mi
notation for species i
n
number of electrons produced when one reactant ion or molecule reacts
R
universal gas constant, J/mol/K
Re
Ohmic resistance, Ω cm2
Rt , A
Charge-transfer resistance associated with reaction A, Ω cm2
r
radial coordinate, cm
r0
radius of disk, cm
si
stoichiometric coefficient for species i , ( si > 0 for a reactant and si < 0 for a product)
⎜
⎟
Ω ⎝ a 2 Di ⎠
=
ω⎛ 9 ⎞
1/3
⎜ 2 ⎟ Sci
Ω⎝a ⎠
Chapter 12. Notation
Sci
Schmidt number, Sci = ν / Di
T
electrolyte temperature, K
t
time, s
vr , v z
radial and axial velocity components, respectively, cm/s
V
potential, V
V
steady-state potential, V
V
oscillating contribution to potential, V
Z
impedance, Ω cm2
z
axial position, cm
zd
diffusion impedance, Ω cm2
zi
charge for species i
page 12: 4
Greek
α
coefficient used in the exponent for a constant-phase element. When α = 0 , the element behaves as an ideal capacitor in
parallel with a resistor.
αA
apparent transfer coefficient for reaction A
βA
Tafel slope for reaction A, V
γi
Fractional surface coverage by species i
Chapter 12. Notation
page 12: 5
Γ
Maximum surface coverage
δi
characteristic diffusion length for species i
θ
homogeneous solution to the oscillating dimensionless convective diffusion equation
θ′(0)
derivative of the solution to the oscillating dimensionless convective diffusion equation evaluated at the electrode surface
η
surface overpotential, V
κ∞
solution conductivity, (Ω cm)-1
A
characteristic length for a finite-length diffusion layer, A = 2.598ν 1/ 3 Di2 / 3 / Ω
μ
viscosity, g/cm s
ν
kinematic viscosity,ν = μ / ρ , cm2/s
ρ
density, g/cm3
τ
finite-length diffusion time constant, τ = A 2 / Di
ξ
normalized axial position, ξ = z / δ i
Φ
ohmic potential, V
ω
frequency of perturbation, rad/s
Ω
rotation speed, rad/sec