Construction of a feedback-controlled positioning system for
advertisement

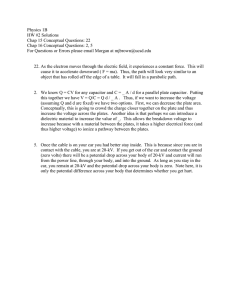
Construction of a feedback-controlled positioning system for the Eöt-Wash LISA small force measurement Colin Connolly, Stanford University advisor: Jens Gundlach UW Research Experiences for Undergraduates Program in Physics We constructed a positioning system for the attractor plate of the Eöt-Wash LISA small force measurement feedback-controlled via software using position input from an infrared laser position sensor. The system was used to drive a simulated attractor plate in sinusoidal motion with average precision of one micron. The systematic influence of hysteresis in the piston pump was the limiting factor; an improved pump should improve the performance of the system by nearly an order of magnitude. must be eliminated. The 2- to 4-mm spacing INTRODUCTION Direct evidence for gravitational waves between the proof masses and spacecraft (GW) has yet to be found. Observations of the housing potentially allows for small forces PSR 1913 + 16 binary pulsar have indirectly between the metal surfaces. Forces due to indicated their existence, but current patch effect potentials are one class of small observatories still lack the sensitivity forces that has not been studied in much detail. necessary to observe GW events on laboratory Macroscopic metal surfaces are a mosaic of timescales. The Large Interferometer Space patches of different exposed crystal planes Antenna (LISA) is a joint collaboration with different surface dipole moments. A between NASA and the European Space difference in the work function of two closely- Agency (ESA) that will achieve sensitivities spaced metals causes a small voltage between great enough to observe GW events such as them. The forces due to this effect are black hole mergers and potentially map the expected to be small, but may be large enough GW background left over from the creation of to require greater spacing between the proof the universe. masses and spacecraft for the LISA The LISA satellites will form vertices observatory. of an equilateral triangle in space with laser Measurement of these small forces, as beams traveling between them. Each satellite well as others due to outgassing, thermal will serve as an interferometer. The laser gradients or other effects, is being made with a beams will reflect from cubical metal proof torsion step pendulum by the Eöt-Wash group masses within each spacecraft. For LISA to at the University of Washington. The achieve its target sensitivity of a 10-23 pendulum will be driven by a closely-spaced minimum fractional length change, any force attractor plate which will move sinusoidally coupling of the proof masses to the spacecraft over a range of about 1 to 2 mm. To avoid 1 electrostatic coupling the attractor plate will be drives the positioning system, which directly moved with an oil bellows fed by a tube from influences the sensor’s measurement. User outside the vacuum chamber. control on the software side defines the This paper details the construction of a equilibrium point. feedback-controlled positioning system for the The position sensor consists of an attractor plate component of the Eöt-Wash infrared laser beam reflecting from a moveable small force measurement for LISA. mirror onto a split photodiode. The laser beam is generated by a 5-mW infrared semiconductor laser. The light passes through EXPERIMENTAL METHOD The experimental apparatus for the a lens and collimator to produce a parallel feedback-controlled positioning system can be beam 1.1 mm in diameter. The beam strikes summarized as three interdependent systems: the mirror with an incident angle of 45º and first, the infrared laser position sensor; second, reflects to reach the photodiode orthogonally. the motor-driven positioning system; and third, As the mirror moves along the normal, the the software feedback loop. The sensor feeds beam translates across the photodiode surface. position information to the feedback loop, The dynamic range of the position sensor is where the information is analyzed and an approximately 1 mm. The fraction, θ, of the output voltage is produced. This voltage differential photocurrent between the two sides FIG 1: Experimental setup: the motor and pump assembly at right drives the bellows at center to move the steel block at left. The position of the block is measured by the position sensor at left. 2 of the photodiodes to the total photocurrent is notch limits the P term’s effect for small errors roughly linear in mirror displacement over that while preserving it for large errors. With this range. notch, the P constant can be set very high so The positioning system compares its that it supplies a strong restoring force to keep input voltage to a voltage divider output via a the mirror near its target position, yet it will high-gain differential amplifier and a push-pull not cause the output to become unstable near transistor driver to power the motor. The the target. Likewise, the I term will only voltage divider is set by a geared multi-turn change significantly once the P term has potentiometer driven by a gear on the motor reduced the error to a manageable level, shaft. The turning of the motor drives a reducing unwanted overshoot. hydraulic piston which draws or pushes oil A hysteresis was observed in the through a tube to a copper bellows in contact piston’s performance. When the piston with the mirror mount. Since the piston changed direction, there was a “dead zone” in location defines the potentiometer voltage, which the motor would spin without oil choosing an input voltage will cause the motor flowing, presumably due to the o-ring in the to spin in the appropriate direction until the piston assembly rolling over. To overcome voltage difference is eliminated and the piston this effect, the feedback loop coupled to every has reached the desired location. large direction change a short (approximately The choice of input voltage is made by 700-ms) burst of maximum voltage to preserve a modified PID feedback loop. The loop linearity. defines the current error as the difference between the current position measurement and RESULTS AND ANALYSIS the target position. The sum of two terms, a P Two periods of sinusoidal plate term proportional to this error and an I term motion are displayed in Figure 2. The lower proportional to the integral of the error over peaks follow a sine wave closely with only a time, defines the output voltage to the small effect of the piston hysteresis still visible. positioning system. The usual D term The peaks for positive θ, however, show a proportional to the change in error is omitted sharp step and are followed by recovery because phase delays causes it to increase the oscillations. The step is caused by the voltage noise in the system. An additional Gaussian burst, since the “dead zone” is not truly “dead” envelope limits the range of the I term to very when going in the negative θ direction. When small errors and a corresponding Gaussian the motor spins quickly for the burst period 3 there is a small oil movement that jogs the then there would be no large deviation from measurement off the target. There is then a this noise level. “dead zone” in the other direction as the Figure 5 is a Fourier transform of the feedback loop attempts to compensate. This periodic motion. The 300-s period component unwanted effect is comparable in magnitude to is clearly visible, as is a small second the motor motion without applying a burst. harmonic near 6.7 mHz and a multitude of Thus the burst was only effective for half of resonances with periods of less than 10 s. the peaks. These high-frequency peaks are natural While the voltage burst was not able to recovery frequencies of the positioning system eliminate the effects of the piston hysteresis, and would be much smaller if the system the waveform is still very reproducible. The maintained consistent sub-micron accuracy, blue points in Figure 3 are a superimposition thus avoiding the need to recover. The size of of all 50 periods of the data set. The red points the second harmonic should also be reduced are the residuals of each period from a spline by smoothing the top peak. All these of a single period (the period chosen for the contributions are at least two orders of spline was the one that minimized the average magnitude weaker than the 300-s resonance, residuals). The horizontal lines are the 1-σ however, especially near the primary average deviation. Clearly the points of resonance itself. greatest nonreproducibility occur at the upper peaks at the onset of and during the recovery SUMMARY from the voltage burst. The positioning system was observed The red curve in Figure 4 shows twice to reproducibly maintain the mirror on average the average standard deviation of a set of one within a micron of its target, although point from each period for each point in time deviations of 5 to 8 microns were observed (e.g. a set of all the first points, a set of all the from the common waveform. The limiting second points, etc.). The plate position factor is the hysteresis of the piston in the deviated from the target within these bounds positioning system. It is reasonable to for 95% of the data collected. The quiet estimate a factor of 5 to 10 improvement with region before the top peak is very calm, the the elimination of the hysteresis alone. The position staying within half a micron of the infrared laser position sensor is sensitive to at target very consistently. It is then reasonable least this precision. to expect that if the hysteresis was removed The hysteresis could be eliminated by 4 the use of a peristaltic pump, which could also potentially increase the resolution of the positioning system, as well; or by the use of a second bellows instead of a piston. ACKNOWLEDGEMENTS I am very grateful for the guidance and patience of Jens Gundlach. I also very much appreciate the advice, assistance and expertise of Stephan Sclamminger and Eric Swanson. REFERENCES C. C. Speake, Class. Quantum Grav. 13, A291 (1996) L. Carbone et al., Achieving geodetic motion for LISA test masses: ground testing results, (2003) J.B. Camp et al., J. Appl. Phys. 71 783 (1992) J.B. Camp et al., J. Appl. Phys. 69 7126 (1991) 5 FIG 2: two periods of attractor plate motion. FIG 3: 50 periods of attractor plate motion (blue, printed for phase information); residuals from cubic spline of one period (red). 6 FIG. 4: Two-σ deviation of averaged data from cubic spline. The attractor plate motion was within these bounds 95% of the time. FIG. 5: Fourier transform of attractor plate motion 7