W4118 Operating Systems
Instructor: Junfeng Yang
Logistics
Homework 2
Who has problems getting the VM?
This assignment requires changes to some assembly
code; we’ll update webpage to include the assembly
changes
Any questions?
Last lecture
Process (cont)
Process termination
Interprocess communication
• Zombie
• Orphan
• Message passing: signal, pipe
• Shared memory: shmget
Processes in Linux
Data structures
Process operations
• Process control block: task_struct
• kernel stack
• Connections between them, thread_info
• fork
• exit()
Today
Processes in Linux
Context switch on x86
Threads
Why and what?
Multithreading Models
Intro to synchronization
Context switch call chain
schedule() (kernel/sched.c) (talk about scheduling later)
context_switch()
swtich_mm (include/asm-i386/mmu_context.h)
switch address space
switch_to (include/asm-i386/system.h)
switch stack, regs, and %eip
__swtich_to (arch/i386/kernel/process.c)
architecture dependent setup
Context switch by stack swtich: the idea
Kernel stack captures process states
Registers
task_struct through thread_info through %esp
Changing the stack pointer changes the
process
esp
Task’s
process-descriptor
Task’s kernel-stack
Task’s thread-info
Context switch by stack switch: the
implementation (simplified)
P0 stack
eax
P1 stack
eax
…
…
ret_addr
thread_info
thread_info
esp
esp
eip
eip
swtich_to(p0,p1)
save registers on stack
p0->esp = %esp
p0->eip = ret_addr;
%esp = p1->esp;
push p1->eip;
ret
ret_addr:
pop registers from stack
include/asm-i386/system.h
p0->eip = ret_addr
esp
eip
eax
…
CPU
Today
Processes in Linux
Context switch on x86
Threads
Why and what?
Multithreading Models
Intro to synchronization
Why threads?
Express concurrency
Web server (multiple requests), Browser (gui +
network I/O), …
for(;;) {
int fd = accept_client();
create_thread(process_request, fd);
}
Efficient communication
Using a separate process for each task can be
heavyweight
• Costly: process creation, context switch, communication
• In general, having a separate kernel anything may be
heavyweight: must trap into kernel for service
Threads
Threads: separate streams of executions that
share an address space
Allows one process to have multiple point of
executions, can potentially use multiple CPUs
Thread control block (TCB): PC, regs, stack, …
Very similar to processes, but different
Single and Multithreaded Processes
Threads in one process share code, data, files, …
Threads vs. Processes
A thread has no data segment
or heap
A thread cannot live on its
own, it must live within a
process
There can be more than one
thread in a process, the first
thread calls main & has the
process’s stack
Inexpensive creation
Inexpensive context
switching
Efficient communication
If a thread dies, its stack is
reclaimed
•
•
A process has code/data/heap &
other segments
A process has at least one
thread
•
Threads within a process share
code/data/heap, share I/O, but
each has its own stack &
registers
•
•
Expensive creation
Expensive context switching
•
Interprocess communication can
be expressive
If a process dies, its resources
are reclaimed & all threads die
•
How to use threads?
Use thread library
E.g. pthread, Win32 thread
Common operations
create/terminate
suspend/resume
priorities and scheduling
synchronization
Example pthread functions
int pthread_create(pthread_t *thread, const pthread_attr_t
*attr, void *(*start_routine)(void*), void *arg);
Create a new thread to run start_routine on arg
thread holds the new thread’s id
int pthread_join(pthread_t thread, void **value_ptr);
Wait for thread termination, and retrieve return value in
value_ptr
void pthread_exit(void *value_ptr);
Terminates the calling thread, and returns value_ptr to
threads waiting in pthread_join
pthread creation example
void* thread_fn(void *arg)
{
int id = (int)arg;
printf("thread %d runs\n", id);
return NULL;
$ gcc –o threads threads.c –Wall –lpthread
}
$ threads
int main()
thread 1 runs
{
thread 2 runs
pthread_t t1, t2;
pthread_create(&t1, NULL, thread_fn, (void*)1);
pthread_create(&t2, NULL, thread_fn, (void*)2);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
return 0;
One way to view threads: function calls,
}
except caller doesn’t wait for callee;
instead, both run concurrently
Today
Processes in Linux
Context switch on x86
Threads
Why and what?
Multithreading Models
Intro to synchronization
Multithreading Models
Where to support threads?
User threads: thread management done by
user-level threads library, typically without
knowledge of the kernel
Kernel threads: threads directly supported by
the kernel
Virtually all modern OS support kernel threads
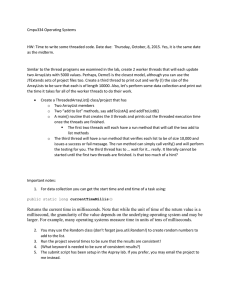
User vs. Kernel Threads
Example from Tanenbaum, Modern Operating Systems 3 e,
(c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639
User vs. Kernel Threads (cont.)
Pros: fast, no system call for
creation, context switch
• Cons: slow, kernel does
creation, scheduling, etc
Cons: kernel unaware, so can’t
schedule one thread
blocks, all blocks
• Pros: kernel knows, complete
flexibility one thread
blocks, schedule another
No free lunch!
Multiplexing User-Level Threads
A thread library must map user threads to kernel threads
Big picture:
kernel thread: physical concurrency, how many cores?
User thread: application concurrency, how many tasks?
Different mappings exist, representing different tradeoffs
Many-to-One: many user threads map to one kernel
thread, i.e. kernel sees a single process
One-to-One: one user thread maps to one kernel thread
Many-to-Many: many user threads map to many kernel
threads
Many-to-One
Many user-level threads
mapped to single kernel
thread
Why good?
• Fast - no system calls required
• Portable - few system
dependencies
Examples:
• Solaris Green Threads
• GNU Portable Threads
Problem
No parallel execution of threads
- can’t exploit multiple CPUs
- All threads block when one uses
synchronous I/O
One-to-One
Each user-level thread maps to kernel thread
Why good? More concurrency
• better multiprocessor performance
• When one blocks, others can run
Examples
• Windows NT/XP/2000
• Linux
• Solaris 9 and later
Problem: expensive
Each user thread requires creation of kernel thread
Each thread requires kernel resources; limits
number of total threads
Most thread operation are system calls
Many-to-Many Model
Allows many user level
threads to be mapped to
many kernel threads (U >= K)
Why good?
• Flexible. OS creates kernel
threads for physical
concurrency, and
programmers create user
threads for application
concurrency
Examples:
• Solaris prior to version 9
• Windows NT/2000 with the
ThreadFiber package
Problem? complex
Most use 1:1 mapping anyway
Two-level Model
Similar to M:M,
except that a user
thread may be
bound to kernel
thread
Examples
IRIX
HP-UX
Tru64 UNIX
Solaris 8 and
earlier
Thread Design Issues
Semantics of fork() and exec() system calls
Does fork() duplicate only the calling thread or
all threads?
Signal handling
Which thread to deliver it to?
Thread Pools
Recall web server example: create a thread for each
user request
Problem:
Thread creation also costly
• And, the created thread exits after serving a request
More user request More threads
Solution: thread pool
Pre-create a number of threads waiting for work
Wake up thread to serve user request --- faster than
thread creation
When request done, don’t exit --- go back to pool
Limits the max number of threads
Today
Processes in Linux
Context switch on x86
Threads
Why and what?
Multithreading Models
Intro to synchronization
Banking example
int balance = 1000;
int main()
{
pthread_t t1, t2;
pthread_create(&t1, NULL, deposit, (void*)1);
pthread_create(&t2, NULL, withdraw, (void*)2);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
printf(“all done: balance = %d\n”, balance);
return 0;
}
void* deposit(void *arg)
{
int i;
for(i=0; i<1e7; ++i)
++ balance;
}
void* withdraw(void *arg)
{
int i;
for(i=0; i<1e7; ++i)
-- balance;
}
Results of the banking example
$ gcc –Wall –lpthread –o bank bank.c
$ bank
all done: balance = 1000
$ bank
all done: balance = 140020
$ bank
all done: balance = -94304
$ bank
all done: balance = -191009
Why?
A closer look at the banking example
$ objdump –d bank
…
08048464 <deposit>:
…
8048473: a1 80 97 04 08
8048478: 83 c0 01
804847b: a3 80 97 04 08
…
0804849b <withdraw>:
…
80484aa: a1 80 97 04 08
80484af: 83 e8 01
80484b2: a3 80 97 04 08
…
// ++
mov
add
mov
balance
0x8049780,%eax
$0x1,%eax
%eax,0x8049780
// -- balance
mov 0x8049780,%eax
sub $0x1,%eax
mov %eax,0x8049780
One possible schedule
CPU 0
mov
time
CPU 1
0x8049780,%eax
balance: 1000
eax0: 1000
add
$0x1,%eax
mov
%eax,0x8049780
eax0: 1001
balance: 1001
eax1: 1001
eax1: 1000
mov
sub
0x8049780,%eax
$0x1,%eax
mov
balance: 1000
One deposit and one withdraw,
balance unchanged. Correct
%eax,0x8049780
Another possible schedule
CPU 0
mov
add
mov
time
CPU 1
0x8049780,%eax
balance: 1000
eax0: 1000
$0x1,%eax
eax0: 1001
%eax,0x8049780
mov
0x8049780,%eax
eax1: 1000
balance: 1001
eax1: 999
sub
mov
$0x1,%eax
%eax,0x8049780
balance: 999
One deposit and one withdraw,
balance becomes less. Wrong!
Race condition
Definition: a timing dependent error involving
shared state
Can be very bad
• “non-deterministic:” don’t know what the output will
be, and it is likely to be different across runs
• Hard to detect: too many possible schedules
– Typical: doesn’t show up in testing, but does show up in field
• Hard to debug: “heisenbug,” debugging changes timing
so hides bugs
– vs “bohr bug”
What to do???
Avoiding race conditions
Critical section: a segment of code that
accesses shared variable (or resource) and
must not be concurrently executed by more
than one thread
To implement critical sections, need atomic
operations
Atomic operations: no other instructions can be
interleaved, executed “as a unit” “all or none”
Example atomic operations
x86: load, store of words
test_and_set, compare_and_swap
Critical-Section Problem
1.
2.
Entry Section - Code
that requests
permission to enter its
critical section.
Exit Section - Code
that is run after exiting
the critical section
Critical Section Goals
Threads do some stuff but eventually might
try to access shared data
time
T1
CSEnter();
Critical section
CSExit();
T1
T2
CSEnter();
Critical section
CSExit();
T2
Critical Section Goals
Perhaps they loop (perhaps not!)
T1
CSEnter();
Critical section
CSExit();
T1
T2
CSEnter();
Critical section
CSExit();
T2
Critical Section Goals
We would like
Safety (aka mutual exclusion)
• No more than one thread can be in a critical section at any time.
Liveness (aka progress)
• A thread that is seeking to enter the critical section will eventually
succeed
Bounded waiting
• A bound must exist on the number of times that other threads are allowed
to enter their critical sections after a thread has made a request to enter
its critical section and before that request is granted
• Assume that each process executes at a nonzero speed
• No assumption concerning relative speed of the N processes
Ideally we would like fairness as well
If two threads are both trying to enter a critical section, they have
equal chances of success
… in practice, fairness is rarely guaranteed