Thermal Effects of Welding A JT8D Magnesium Gearbox Housing Jeff Bode
advertisement

Thermal Effects of Welding A JT8D
Magnesium Gearbox Housing
Jeff Bode
Andrew Foose
MEAE6630
April 6, 2000
Table of Contents:
List of Symbols Used
…………………………………..
3
Abstract
…………………………………..
4
Introduction
…………………………………..
4
…………………..
5
Problem Discussion and Formulation
Results
…………………………………..
10
Conclusions
…………………………………..
14
Bibliography
…………………………………..
15
………..
16
Appendix I: Convection and Radiation Calculations
2
List of Symbols Used:
As
c
T
g
G
hf
h
k
Kii
L
Nu
P
p
Pr
q
q'
q"
Ra
t
S
T
Ts,Tsurf
T
Surface Area
Thermal Diffusivity
Volumetric Thermal Expansion Coefficient
Specific Heat
An Allowable Virtual Temperature
Emissivity
Internal Heat Generation Rate
Acceleration due to gravity
Outward Normal Vector
Film Coefficient
Convection Heat Transfer Coefficient
Thermal Conductivity
i Direction Thermal Conductivity
Grad Operator, Characteristic Length
Wavelength
Nusselt Number
Velocity Vector, Kinematic viscosity
Perimeter
Pressure
Prandtl Number
Heat Transfer Rate
heat transfer per unit length
heat flux
Rayleigh Number
Density
Stefan-Boltzmann Constant
Time, 0 t
Surface of Convection
Temperature
Surface Temperature
Ambient Temperature
3
Abstract:
Often in the aerospace overhaul industry, high priced parts demand repairs in order to
avoid the cost of replacement. One such part is the Pratt & Whitney JT8D gearbox
housing. A weld repair to the “snout” location of this magnesium housing has been
proposed in order to save time and money. Having used ANSYS to analyze the thermal
effects of this weld, it is determined that they are acceptable based on the following
results. The heat-affected zone is small enough that the post-welding inspection will be
minimal. Also, the key dimensional features such as the bearing bores are outside of the
heat-affected zone and will not be distorted during the repair.
Introduction:
In the aerospace overhaul and repair industry, there is a continual drive to lower costs and
turn-around time. Some parts are not cost effective to repair because it is more
economical for the customer to buy new replacement parts. However, there are parts that
are very expensive, therefore, very cost effective to repair. One example of these parts is
accessory gearbox housings on aircraft engines. When an overhaul facility uses puddle
welding to repair a large area of a magnesium gearbox housing, portions of the housing
can reach high temperatures. These repairs are often deemed risky because of the extent
of the heat affected zone on the casting
during this process. The heat affected zone is
the amount of material that sees exposure to
temperatures high enough to distort the
casting or affect its material properties.
Magnesium is notorious for its creep
properties, and the heating could cause
distortion. The major areas of concern are
the bearing bores, as they have very tight
tolerances.
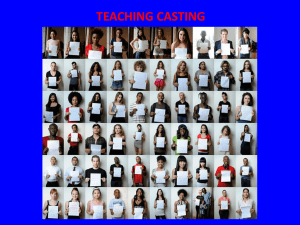
This paper assesses the effects of puddle
Figure 1: JT8D Gearbox Housing
welding the Pratt & Whitney JT8D
magnesium accessory gearbox housing “snout” location. This gearbox is shown in
Figure 1. The objective is to determine the amount of heat effected zone and thus the
area that will need to be inspected for distortion after the analysis. Determining the
minimal amount of area to be inspected will reduce cost and turn-around time on this
repair. Also, it is important to determine if the bearing bores are located in the heat
affected zone.
This analysis was performed using ANSYS thermal modeling. 2-D shell elements were
used because the thickness to length ration of the walls of the housing was relatively
small. The Boundary Conditions and Loading will be described in detail in the following
sections. The governing equation in the ANSYS thermal analysis package is the
following.
4
T
T
T
v LT L q g
t
c
Where {v} is the velocity vector for mass transport of heat, and {L} is the following.
L , ,
x y z
T
{q} is the heat flux vector, and g is the internal heat generation rate. Both g and {v} are
zero for this analysis because there is no internal heat generation or velocity of the
casting. This yields the following equation.
T
T
c
L q 0
t
The vector {q} is related to conduction and convection by the following two equations
respectively.
0
0
K xx
{q}cond 0
K yy
0 {L}T
0
0
K zz
{q}Tconv {} h f (T Tsurf )
{} is the element outward normal vector. With some manipulation the following
integral, I, must be minimized to find the approximate solution. This is what ANSYS
will do for us.
T
I cT
{L}T (T )([ D]{L}T ) d (vol) Th f (T Tsurf )dS
vol
S
t
Each element of the mesh must meet the above equations to minimize the overall
integral. What this means is that for a steady state analysis (T/t=0) the heat flowing
into the element by conduction must be equal to that flowing out by convection. For
transient analyses, the specific heat term comes into play.
Problem Description and Formulation:
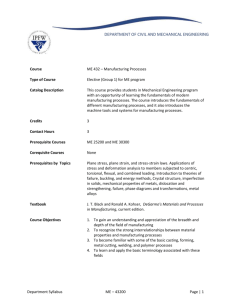
The gearbox housing was modeled in Unigraphics. The 2-D modeling does not show
every fillet and detail of the casting, but does
give a very good representation of the overall
“Snout”
casting geometry. The time necessary for a
detailed model dictates that many minor features
be eliminated from consideration. Also, these
details will result in difficulties in creating finite
elements, often in areas that are unimportant.
This is often referred to as feature suppression.
Bores
The model was then imported into ANSYS for
the heat transfer analysis. Figure 2 shows the
model after it was imported into ANSYS.
Figure 2: 2-D Model of Housing
5
Material Properties:
The material properties used for the elements were those of AMS4439, an aerospace
grade magnesium alloy. These were directly input from a Pratt & Whitney database, and
are therefore proprietary and will not be shown in this report. However, they were
similar to other magnesium alloy properties. Also, this casting had various thicknesses.
These are shown in Figure 7.
Loading:
The loading of the model occurs where the welding takes place at the interface to the
“snout” shown in Figure 2. The heat flux applied to the casting during the welding
process could not be directly computed despite knowing the voltage and amperage used
during welding. The reason being that there are tremendous energy losses in the arc
itself. The air ionizes, taking away much of the energy that would otherwise go into the
casting. There is also a certain amount of heat that needs to be generated in order to melt
the casting area and weld wire. There is also a certain level of porosity in this area of the
casting, and the exact amount of material that is being melted would vary from casting to
casting. To be conservative, the average melting temperature of the magnesium alloy
(1065F) was considered as a boundary condition at the “snout” interface. Thus it is
assumed that the flux at the interface is high enough to maintain this temperature at all
times. It would actually only be this temperature at the point welding is taking place,
which is why this is conservative.
This problem cannot be solved by conduction alone, as the model would show a steady
state temperature of 1065F throughout the casting without any other heat losses.
Therefore boundary conditions are needed.
Boundary Conditions:
The two forms of energy dissipation considered are convection and radiation. During the
welding process, the casting is typically held in a fixture that does serve to remove heat
more readily than the convection and radiation modes. However, since there is nothing to
control where the fixtures are attached to the casting, we will evaluate a free standing
casting as a worst case scenario. Also, because there are no limits as to how long the
welding process can take, the first item evaluated was the steady-state case.
Convection
The convection heat transfer coefficient needs to be determined in order to solve the heat
conduction problem presented. This coefficient is heavily dependent on the surface
geometry, external airflow, and film temperature. As the casting is a very complex
shape, some rather broad assumptions need to be made in order to determine reasonable
values of h for differing surfaces of the casting, and how h changes based on the surface
temperature. Some of the major assumptions include the characteristic length used in the
6
determination of Rayleigh's number and the film temperature at which the air properties
were obtained. Air is also assumed to be an ideal gas. The free flow was assumed to be
turbulent because of the complex geometries involved in the detailed casting. The film
temperature was taken at the average of the surface temperature and the ambient air
temperature. In determining the convection heat transfer coefficients, the casting was
assumed to be in its normal operating orientation, with the "snout" in the upright position.
Calculations were done in Excel using SI units, as the English units were not readily
available. The final h values were converted into English units.
The basic equation for convection heat transfer is:
q" h(Ts T )
For this project, only free convection was assumed to act on the casting, as the welding is
typically only done in large, contained facilities where there are no active fans acting on
the casting. The general equation for determination of the convection heat transfer
coefficient is given by:
h
k
Nu
L
where k is determined for air in the film layer, L is the characteristic length for the
geometry involved, and Nu is a dimensionless quantity.
For a plate, the characteristic length may be determined by
A
L S
P
where AS is the surface area of the plate, and P is the perimeter of that plate. As the
casting is very complex, this is the best estimate we can use in determining the
convection heat transfer coefficient.
Table 1 shows the assumptions made to complete the calculations.
Vertical Area
5 ft2
Vertical Perimeter
5.5 ft
Vertical Characteristic Length
1 ft
Horizontal Area
5 ft2
Horizontal Perimeter
0.28 ft
Horizontal Char. Length
0.2 ft
Table 1: Assumptions Used in Convection Calculations
The Nusselt number then needs to be determined. This is usually a function of the
Rayleigh number and Prandtl number, both of which are dimensionless quantities. For
the upper surface of a heated plate,
7
1
Nu L .54 Ra L4 for (104RaL107)
1
3
L
NuL .15Ra for (107RaL1011)
For the lower surface of a heated plate, the following equation applies:
1
4
L
Nu L .27 Ra for (105RaL1010)
For a vertical plate, the Nusselt equation is a little more complex:
2
1
.387 Ra L 6
Nu L .825
over the entire range of RaL.
8
9
27
.492 16
1
Pr
The Rayleigh number may be determined by the following equation:
Ra L
g (TS T ) L3
For an ideal gas,
1
1 p
1
2
T p RT
T film
When all these equations are solved, the convection heat transfer coefficient may be
determined for different areas of the casting. ANSYS allows tables of heat transfer
coefficients to be used, so Table 2 shows the values that were generated for various
surface temperatures and plate orientations.
Temperature
(deg. F)
1065.002
980.33
890.33
800.33
710.33
Top Horizontal
Orientation
1.05406E-05
1.04475E-05
1.03028E-05
1.01911E-05
9.98138E-06
Bottom Horizontal
Position
5.2703E-06
5.22576E-06
5.16103E-06
5.09139E-06
4.99547E-06
Vertical
Position
7.68997E-06
7.65359E-06
7.59109E-06
7.52196E-06
7.41214E-06
8
620.33
530.33
440.33
350.33
260.33
170.33
80.33
9.78815E-06
4.88903E-06
9.44798E-06
4.74905E-06
9.19724E-06
4.58163E-06
8.68723E-06
4.33917E-06
8.04884E-06
4.01664E-06
6.97429E-06
3.49383E-06
4.08854E-06
2.03227E-06
Table 2: Coefficients of Convection (BTU/sec-in2-F)
7.28553E-06
7.10384E-06
6.87538E-06
6.52233E-06
6.02626E-06
5.17672E-06
2.81098E-06
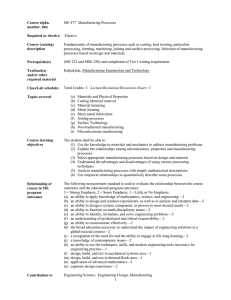
Figure 3 shows the areas where each table of convection coefficients was applied. As
you can see many assumptions were made while doing this. The effects of these
assumptions will be discussed in the results section.
Top Horizontal Conv
Bottom Horiz. Conv
Vertical Conv
Figure 3: Applied Convection Boundary Conditions
Radiation
The model was not analyzed with radiation as a boundary condition. After obtaining
results with convection only it was determined that the key surfaces were not in the heataffected zone. Radiation would just result in further reducing the size of the heat-affected
zone. If we were to apply radiation, the following would be used.
In order to simplify the radiation analysis, the various casting features are assumed to not
absorb any incident radiation from other casting wall surfaces or any other nearby
objects. Thus the absorbitivity of the magnesium is assumed to be zero. The casting
walls are also assumed to be diffuse-gray surfaces. There was no available data to break
down the radiation by wavelength (). The governing equation for this heat transfer is
q" Ts4 T4
The emissivity of magnesium varies with temperature, and values were obtained from
some materials handbooks that were tabulated and input into Table 3. The data above
500F would be extrapolated linearly, which would be another assumption used in the
modeling.
9
Temperature (deg. F) Emissivity
1065.002
0.21475
980.33
0.20205
890.33
0.18855
800.33
0.17505
710.33
0.16155
620.33
0.14805
530.33
0.13455
440.33
0.12105
350.33
0.10755
260.33
0.09405
170.33
0.08055
80.33
0.06705
Table 3: Coefficients for Radiation Boundary Conditions
Results:
Three separate analyses will be discussed here. First, a coarse element mesh, steady state
analysis was performed to make sure the model was working. Second a Fine mesh,
steady state analysis was completed to determine convergence of the model. Finally, a
transient analysis of a coarse mesh was performed to understand the effects of welding
time on the heat affected zone
Coarse Mesh, Steady State.
The coarse model was constructed using an element spacing of 0.5”x0.5”. The mesh
create using the automesher in ANSYS is shown in Figure 4. The loading and boundary
conditions were applied and the results are shown in Figure 5 and 6. Figure 5 shows a
nodal temperature plot,
and Figure 6 shows the
heat flux throughout the
model. It makes sense that
the greatest heat flux is
seen where the
temperature changes the
most. Figure 5 shows that
the heat material does not
reach into the bearing
bores. In fact, only the top
section of the casting sees
any affects of the welding
process.
Figure 4: Coarse Mesh Element Plot
10
Figure 5: Coarse Mesh Temp. Plot
Figure 6: Coarse Mesh Flux Plot
Fine Mesh, Steady State:
Figure 7 shows the fine mesh element spacing of the model. The 0.5” spacing was
maintained on the bottom of the casing where the thermal gradient was not important as
.1825”
.3125”
.625”
1.00”
1.333”
Figure 7: Fine Element Spacing With Thickness Regions Specified
shown by the coarse model. However the element spacing in the area of the “snout” was
changed to 0.3”. The results are shown in Figure 8 and 9, showing Temperature and Heat
Flux respectively. Of primary importance is the very small change in the thermal profile
despite a 40% change in element size. This is a sign of a converging solution and
therefore, there was no need to pursue and further reduction is mesh size.
11
Figure 8: Fine Mesh Temp Plot
Figure 9: Fine Mesh Flux Plot
The results show that the heat effected zone is small enough that the bearing bores are not
at risk of being distorted. Also, The zone is small enough to minimize the amount of
inspections performed following the weld, and therefore the cost to perform these
inspections will be small.
Previously discussed were the assumptions of how the convection coefficients were
applied to the model. As you can see in Figure 3, some of the horizontal convections
were applied to not-so-horizontal surfaces. Being limited to horizontal or vertical it was
impossible to model everything completely. However, Figure 8 shows that a majority of
the surfaces that see high temperature were indeed horizontal. Therefore, the effect of the
assumptions can be considered negligible to the final results.
Finally, we have been in discussion with overhaul shops that have been performing this
repair. Mechanics at these shops have expressed that they can touch the outer regions of
the housing near the outer bores while welding without burning themselves. Although
this is not proof the model is accurate, it does show some correlation to the real world.
These results show that the transient analysis is not necessary. This steady state analysis
is very conservative and shows the effect of welding does not reach any critical features.
However for the sake of this report, we will perform the transient analysis using the
coarse mesh.
Coarse Mesh, Transient:
The coarse mesh was used for speed in
computation. The increased number of
elements with the fine mesh would drastically
increase computer time with little to gain in
accuracy as shown by the steady state
comparison.
The assumption was made that the 1065F
Figure 10: Transient, 1 sec.
12
loading to the “snout” would occur within 1 second. Figure 10 shows the housing after it
has been loaded to this temperature.
Figures 10-15 show the housing at several different time points following this initial
loading. It is shown that, after 2.5 minutes, the housing has reached approximately 90%
of the thermal increase it will see. Over the next 8 minutes or so, the thermals slowly
approach the steady state solution. Because the weld takes over 2 minutes to complete,
the steady state solution is a good conservative solution to this problem.
Figure 11: 31 Seconds
Figure 13: 156 Seconds
Figure 12: 70 Seconds
Figure 14: 321 Seconds
Figure 15: 600 Seconds
13
Conclusions:
The results showed less than a 5% change with a 40% change in element length. The
model was converged. Therefore the results are as accurate as the assumptions allow
them to be.
The extent of the heat-affected zone is limited to the upper surfaces of the housing.
The bearing bores remain approximately 70 degrees Fahrenheit and therefore will not
be distorted during the weld process.
The transient model shows that it will take less than 10 minutes to reach steady state.
It is concluded that this repair should pass heat generation and temperature criteria.
14
Bibliography:
ANSYS Theory Reference, 001099, Ninth Edition, SAS IP, Inc.; Section 6.1 Heat Flow
Fundamentals.
DeWitt and Incropera. Fundamentals of Heat and Mass Transfer, New York, John Wiley
and Sons, 1996.
Durocher, Larry et al. Introduction to ANSYS for Pratt & Whitney, 1998
Siegel and Howell. Thermal Radiation Heat Transfer, Washington DC, Taylor and
Francis, 1992.
15
Appendix I
Information on convection heat transfer and radiation heat transfer emissivities are
included on attached Excel Workbook "Convection Coefficients.xls".
16