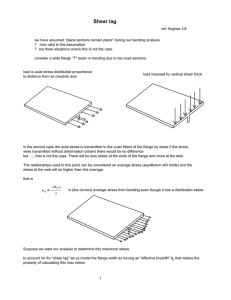
The Effect of T-Stiffener Web and Flange Tilt on Frame... Evaluated using Finite Element Analysis
advertisement

The Effect of T-Stiffener Web and Flange Tilt on Frame Stress Evaluated using Finite Element Analysis by Dean Pasquerella An Engineering Project Submitted to the Graduate Faculty of Rensselaer Polytechnic Institute in Partial Fulfillment of the Requirements for the degree of MASTER OF ENGINEERING Major Subject: MECHANICAL ENGINEERING Approved: _________________________________________ Ernesto Gutierrez-Miravete, Project Adviser Rensselaer Polytechnic Institute Hartford, Connecticut December, 2014 CONTENTS CONTENTS……………………………………………………………………………...ii LIST OF TABLES………………………………………………………………………iii LIST OF FIGURES……………………………………………………………………...iv NOMENCLATURE……………………………………………………………………...v LIST OF KEY WORDS…………………………………………………………….…...vi ACKNOWLEDGEMENT………………………………………………………………vii ABSTRACT……………..……………………………………………………………..viii 1.0 INTRODUCTION/BACKGROUND………………………………………………...1 2.0 THEORY/METHODOLOGY………………………………………………………..6 2.1 Specification Requirements…………………………………………………...…6 2.2 Assumptions……………………………………………………………………..6 2.3 Closed Form Analysis………………………………………………………...…8 2.4 Finite Element Analysis………………………………………………………....9 3.0 RESULTS/DISCUSSION…………………………………………………………..15 3.1 Closed Form Solution………………………………………………………..…15 3.2 Finite Element Analysis Results……………………………………………….15 3.2.1 Baseline Model Results………………………………………………….15 3.2.1 Model Iteration Results…………………………………………………15 4.0 CONCLUSIONS……………………………………………………………………18 5.0 REFERENCES……………………………………………………………………...20 APPENDIX A: SUPPLEMENTAL CALCULATIONS……………………………….A1 APPENDIX B: CONVERGENCE RESULTS…………………………………………B1 ii LIST OF TABLES Table 1: Web and Flange Tilt Model Iteration Results……………………………...………..15 Table A.1: Input Values for Appendix A Calculations……………………………………....A4 Table A.2: Output Values for Appendix A Calculations……………………………………A4 Table B.1: Summary of Peak Stress for Boundary Condition Evaluation……………………B3 Table B.2: Number of Elements and Element Size Convergence Analysis………………….B4 Table B.3: Summary of Peak Stress for Convergence Analysis……………………………...B5 iii LIST OF FIGURES Figure 1: Schematic Showing the Portions of a T-Stiffener………………………………...….1 Figure 2: Examples of Flat Plate Stiffener Arrangements…………………………………..….1 Figure 3: Examples of Cylindrical Plate Stiffener Arrangement……………………………….2 Figure 4: Elevation View of a Submarine Pressure Hull with Internal Stiffeners……………...2 Figure 5: Cross Section View of Different Web and Flange Tilt Combinations……………….3 Figure 6: Example of a Typical Shell and Frame Assembly Modeled using FEM…………….4 Figure 7: Sketch Showing Geometry Values for the Stiffener System………………………...8 Figure 8: Engineering Sketch of a Submarine Pressure Hull and Sub-Model Location……...10 Figure 9: Depiction of the Location of End Load and Displacement Boundary Conditions in Relation to Frame Locations………..…………………………………………………………10 Figure 10: Depiction of the Location of End Load and Displacement Boundary Conditions in Relation to Frame Locations …………………………………………………….……………12 Figure 11: Example FEM Showing End Load and Displacement Boundary Conditions….…12 Figure 12: Section View at Cut Plane Showing Location of Displacement Boundary Conditions……………………………………………………………………………………..13 Figure 13: FEM Results for 2.0 Degree Web and Flange Tilt Condition……………………16 Figure 14: FEM Results for 2.0 Degree Web and Flange Tilt Condition Showing the Peak Compressive Stress in the Flange……………………………………………………………..17 Figure 15: Un-deflected and Deflected Shape of FEM at 2.0 Degree Web and Flange Tilt Condition……………………………………………………………………………………...17 Figure B.1: Section View of Pressure Hull Showing Frame Number Locations………….…B2 Figure B.2: Elevation View Showing Typical Frame Bay Deflections………………………B4 Figure B.3: Description Key for Table B.2 Column Titles…………………………………...B5 iv NOMENCLATURE Ac: Aeff: Af: Afl: Ap: At: Aw: b: d: Do: E: FEA: FEM: g: h: hf: L: Lf: p: R: Rcg: Rf: Ro: tf: wf: yf: yp: yt: yw: : : : θ: : : f: σc: σmax : σy: Circumferential Area (in2) Effective Cross-Sectional Area of the Frame (in2) Area of the Frame (in2) Area of Flange (in2) Area of Plating (in2) Total Section Area (in2) Area of Web (in2) Web Thickness (in) Stiffener Depth (in) Diameter to External Surface of Shell (in) Modulus of Elasticity (lb/in2) Finite Element Analysis Finite Element Model Acceleration of Gravity (in/s2) Shell Plating Thickness (in) Height of Fluid (in) Unsupported Length of Shell (in) Center-to-center Distance between Adjacent Frames (in) Hydrostatic Pressure (psi) Radius to Mean Surface of Shell (in) Radius to Neutral Axis of the Frame (in) Radius to Face of Flange (in) Outside Radius of Shell (in) Flange Thickness (in) Flange Width (in) Centroid of Flange (in) Centroid of Plating (in) Total Section Centroid (in) Centroid of Web (in) Ratio of the Effective Frame Area to Shell Area (dimensionless) Ratio of the Flange Width to Frame Spacing (dimensionless) Shell Stress Parameter (dimensionless) Shell Flexibility Parameter (dimensionless) Poisson Ratio (dimensionless) Material Density (lb/in3) Fluid Density (lb/in3) Compressive Stress (psi) Maximum Stress Allowable (psi) Material Yield Strength (psi) v LIST OF KEY WORDS Finite Element Analysis, Finite Element Model, Flange Tilt, Frame, Midbay, Pressure Hull, Shell, Submarine, T-Stiffener, Tolerance, Web Tilt vi ACKNOWLEDGMENT I would like to take this opportunity to thank my mother for her help and support throughout the master’s program at RPI. I would never have reached this point in my career without her guidance. I would like to thank the entire RPI staff for their continued support and help in order to complete my master’s degree. Finally, I would like to thank my project advisor, Ernesto Gutierrez-Miravete, for his support over the course of this project. It was a struggle at times and difficult to reach this point, but your persistence and determination has been very helpful throughout this process. vii ABSTRACT The goal of this project is to use finite element analysis to determine at what angular offset a T-stiffener will exceed yield when subjected to uniform loading from submergence pressure in a submarine application. It is unavoidable during the fabrication and construction process of a plate/stiffener assembly to create geometrical imperfections. These imperfections result in an increase in stress and deflection of the stiffener due to a modified load path. However, during typical initial design, these deficiencies are not taken into account, as the assembly is analyzed as having perfect geometry. Therefore, the effect on specification requirements for stress due to tilt in the web and flange of a T-stiffener is unknown. The evaluation will be performed on a cylinder supported by T-stiffeners, which is externally pressurized to simulate a submarine under sea pressure. Initial engineering design will be performed on a T-stiffener in which the web and flange are perpendicular to one another and the web and cylinder are perpendicular to one another. This will serve as the baseline model. The vertical web and horizontal flange pieces of the T-stiffener will then be offset to certain angular imperfections resulting in increased stress and deflection in the Tstiffener. Varying offsets of the web and flange will be evaluated to determine what construction tolerances are required to assure that the design does not result in stresses exceeding specification tolerances, which in turn could lead to failure in the design. viii 1.0 INTRODUCTION/BACKGROUND This study focuses on the effect of construction tolerances inherent in the manufacturing and assembly of T-stiffeners used to support a cylinder under a uniformly distributed load. Tstiffeners are used in numerous shipbuilding applications, such as in the design of tanks, bulkheads, holding trunks, and especially in the cylindrical pressure hull of a submarine. A Tstiffener consists of a horizontal flange connected to a plate with a vertical web. The Tstiffener and plate assembly creates an I-beam cross-section. The web serves to resist the shear force in the stiffener, while the flange serves to resist the bending moment experienced by the stiffener. A schematic showing the web, flange and plate portions of a T-stiffener is shown in Figure 1. Where “stiffener” is used herein, it refers to the T-stiffener design. Figure 1: Schematic Showing the Portions of a T-Stiffener Some examples of how stiffeners can be arranged in tanks, bulkheads or holding trunks (i.e. flat plate designs) and also in pressure hull and non-pressure hull applications (i.e. cylindrical designs) can be seen in Figures 2 and 3, respectively. Also, a schematic showing the stiffener design used in a submarine pressure hull application is shown in Figure 4. Figure 2: Examples of Flat Plate Stiffener Arrangements 1 Figure 3: Examples of Cylindrical Plate Stiffener Arrangement Figure 4: Elevation View of a Submarine Pressure Hull with Internal Stiffeners The engineering design of the stiffeners starts by creating in an initial design for each specific application that assumes ideal geometry, meaning 90 degrees between the vertical web and the base (i.e. pressure hull shell, tank structure, holding bulkhead) and 90 degrees between the vertical web and horizontal flange. However, this ideal design does not take into account the imperfections that result from the manufacturing and construction process of these stiffeners. Stiffeners are used all over a submersible, in many different applications. Due to the high volume of use and large scale and size of these stiffeners, imperfections are inherent in the construction process and are unavoidable. Additionally, welding at high temperatures results in perpendicularity of the plate/web and web/flange to be nearly impossible. 2 Tolerances are set forth to allow for a certain amount of inaccuracy during this process, however, it is necessary to understand if these tolerances are adequate or not. Several different scenarios using different combinations of flange and web tilt can exist, as shown in the engineering sketches in Figure 5. Figure 5: Cross Section View of Different Web and Flange Tilt Combinations Angular offsets, or tilt, of the web and flange pieces leads to increased stresses in the stiffeners. This could result in stresses exceeding the allowable limits set forth by the specification documents, ending in failure of the design. Based on each specific application, stress limits are set forth by specification documents, which are usually based on a percentage of the materials yield strength. Fabrication specifications provide allowances for the amount of tilt in degrees the web can have in relation to the plate, and the flange can have in relation to the web. To assure these tolerances are satisfied, web and flange tilt measurements are performed after construction of the assembly has been completed. If a web or flange tilt tolerance is exceeded, the construction tradesman either fixes the out of tolerance condition, or provides the condition to engineering to evaluate the specific application to determine its acceptability via analysis. Another important aspect of understanding the effects of imperfect stiffener conditions is based on the rework that needs to be performed due to the stiffener exceeding construction tolerances. Fixing the condition can be completed in several different ways. Some of these solutions are for the web or flange pieces to be jacked back into place with jacking bars, the 3 welds of the web to plate, or of the flange to web to be cut loose and re-welded, to apply additional weld beads over the existing welds (the heat from the welding can draw back or pull the web/flange back into tolerance), or a combination of these methods. Whichever solution is chosen, additional work is required which leads to increased cost, schedule impacts, quality impacts, and the possibility to result in other construction errors and rework. Therefore, by having a better understanding of how stiffener tilt affects the strength of the stiffener, more conditions can be determined to be acceptable as-is using analytical techniques, which results in less rework. Finite Element Analysis (FEA) was used to determine at what web and flange tilts the specification requirements are met and when they are exceeded. The first step will be to perform an initial engineering evaluation using closed form solutions to determine a baseline model. The initial engineering evaluation will analyze a cylindrical plate and a stiffener under a uniformly distributed external load on the cylinder, which represents sea pressure on a submarine. This initial engineering evaluation using a closed form solution will then be compared with the results of a Finite Element Model (FEM) created with the same geometry. An example of a typical shell and frame assembly modeled using FEM is shown in Figure 6. In figure 6, elements used to model the shell, web and flange are shown in green, yellow and red, respectively. Figure 6: Example of a Typical Shell and Frame Assembly Modeled using FEM 4 This is typical in submarine design, as final configurations determined from FEA can be very different from the initial design, due to modifications in the structure. Structural modifications can be due to fabrication constraints, material availability or stress concentrations from asymmetric structure and foundations that alter certain areas of the design. Typically, an FEA based of an initial design will be modified several times until an adequate solution is reached. This step of the design process will not be addressed in this paper, as it is not within the scope of this project. However, it is important to note that numerous iterations are performed before a final solution is reached. Once a baseline FEM is developed, including a mesh convergence study and boundary condition evaluation, the baseline FEM will then be modified by varying tilts in the flange and web to evaluate at what angle the peak stresses in the stiffeners exceed tolerances. 5 2.0 THEORY/METHODOLOGY 2.1 Specification Requirements Specification requirements are set based on the application being evaluated. Stiffeners are used in many different applications on a submarine and are thus evaluated for many different specification requirements based on the purpose of the stiffener. In some cases, stiffeners are allowed to enter into the inelastic or plastic region, while in other cases, stiffeners are required to remain within the elastic region. For the purpose of this paper, we will assume that the stiffeners evaluated will be designed to remain within the materials elastic region. This is an effective method to evaluate an application that experiences fatigue loading to assure no permanent deformation exists throughout the life of the stiffener. The evaluated loading condition experienced by a specific application is also based on the function of the assembly. The application examined in this paper is a pressure hull submersible under sea pressure, and hence, the loading is considered to be a uniformly distributed pressure load, rather than a point load, partially distributed load or non-uniformly distributed load. 2.2 Assumptions For the purpose of this analysis, several geometric properties, material properties, loading and specification requirements will be chosen to resemble a cylinder/stiffener assembly used in a typical submarine application. Loading A uniformly distributed pressure load (p) of 1100 psi will be applied on the external side of the cylinder, which represents a submarine in the ocean at approximately 2475 feet deep. It is assumed that all forces (loads and reactions) are normal to the plane of the plates. Ocean pressure can be calculated using the following equation: p = f * g * hf (1) In this equation, f is the density of water, g is the acceleration of gravity and hf is the height of the fluid. The density of salt water depends on several factors, with the main factors being the water salinity (the amount of salt content in the body of water) and the temperature of the water. As for temperature, the temperature of the ocean varies greatly depending on location 6 on earth, the depth under water and the salinity of the water. For the purpose of this evaluation, the density of water is assumed to be 62.4 lb/ft3. Material Properties To represent the typical properties used on a submarine pressure hull, the cylinder and stiffer will be made of the same material, which is high yield steel having a yield strength (σy) of 100 ksi, i.e. HY-100 steel. The steel has a density () of 0.283 lb/in3, a Poisson Ratio (ν) of 0.3, and a modulus of elasticity (E) of 30E6 psi. Also, material assumptions are made such that the steel is of uniform thickness and homogenous isotropic material. The steel has the same modulus of elasticity in tension and compression. Stress Allowable For the purpose of this evaluation, we will assume that to achieve a maximum stress equal to the materials yield strength, as specified in Section 2.1, the maximum allowable stress in our baseline analysis is less than 95% of the material yield strength. This 5% allowance will be placed into the design to account for the manufacturing uncertainty analyzed with the models. Thus, the maximum stress (σmax) in the baseline model will be held to 0.95*(100 ksi) = 95 ksi. Geometry Many factors contribute to the geometry of the cylinder and stiffener assembly, with an overall goal of creating an assembly that meets the design intent, but results in the lowest cost to build and weighs the least. Additionally, before the stiffeners of a submarine can be analyzed, the arrangement of all internal components is evaluated. This is important as limiting free space is essential in cutting down on weight and size of the submarine, which results in increased submarine capabilities. This process of the design can take several months or even years, with a multitude of iterations. Therefore, for the purpose of this analysis, we will assume an arrangement team review and a cost/weight analysis has been performed which results in the following geometry and thickness values: 7 Pressure Hull Shell Outside Diameter = d = 30’ = 360” Pressure Hull Shell Thickness = h = 1.5” Center to Center Distance Between Adjacent Frames = Lf = 30” Stiffener Depth = d = 10.0” Flange Width = wf = 6.0” Web Thickness = b = 0.5” Flange Thickness = tf = 0.7” A sketch showing the stiffener system is shown in Figure 7: Figure 7: Sketch Showing Geometry Values for the Stiffener System Additionally, it is assumed that the plates have no imperfections, i.e. radii are constant and exact, and there are no variations in length/width/depth of the stiffeners, so the cross section is uniform. 2.3 Closed Form Analysis The ability of a circular cylindrical shell reinforced by uniformly spaced ring frames to support a pressure load is documented in Reference [1]. The paper investigated the axisymmetric elastic deformations and stresses in a ring stiffened circular cylindrical shell 8 under hydrostatic pressure and properly considered the nonlinear “beam-column” effect produced by the combination of longitudinal compression with longitudinal bending. In the case of a ring-stiffened cylinder under hydrostatic pressure, a portion of the shell will act effectively with the ring frame to resist direct stress and bending moment caused by the interaction between the shell and frames. The equation for the effective width of the shell plating is provided in Appendix A. Appendix A also provides all the equations used to calculate maximum stress on the internal face of the flange in the stiffener/plating assembly discussed herein. 2.4 Finite Element Analysis For the FEMs evaluated herein, 2-dimensional, or 2-D, elements were utilized. Furthermore, they were four noded, quadrilateral general shell elements. The FEM geometry was constructed in Patran, Reference [2], while the finite element computation and postprocessing was performed with Electric Boats in-house software COMMANDS, Reference [3]. The FEMs could have been constructed using either 2-D or 3-D elements, as both would have yielded accurate results with the geometry of this study. 2-D elements can be used in lieu of 3-D elements when applications have some form of symmetry and minimal complexity in the geometry to be model, which is the case for the assemblies evaluated herein. 2-D elements allow for quicker modeling time, shorter runtime and reduced cost. Additionally, 2-D elements are frequently utilized through submarine design, and were therefore used herein to conform to typical industry standards. There are two types of 2-D elements that are commonly used, which are triangular elements and quadrilateral elements. For the models created herein, only quadrilateral elements were utilized. Quadrilateral elements were used to create a structured grid, which was easy to construct and mirror on planes of symmetry. Triangular elements were not needed since the geometry and mesh were relatively simple to construct. Triangular elements are much more efficient when modeling asymmetric structure and areas where multiple parts intersect. Since many engineering applications evaluated using FEA, such as a submarine pressure hull, can be of a large scale, it is important to create sub-models to evaluate only the portion of the problem that is being analyzed. Creating a sub-model to reflect the condition of an entire 9 submarine can be done using end loading and boundary conditions. Figure 8 presents an engineering sketch of an entire submarine pressure hull and depicts the smaller area of the submarine pressure hull which will be modeled. Figure 8: Engineering Sketch of a Submarine Pressure Hull and Sub-Model Location To represent the portion of the pressure hull which is not modeled, nodal end load boundary conditions and displacement boundary conditions are used, as shown in Figure 9. Nodal end loads were arbitrarily chosen to be on the aft end of the model, while displacments were chosen to be on the forward end of the model. These locations could have been reversed and the reuslts would not have been affected. The purpose of the nodal end load and displacement boundary conditions are to represnet the portions of the submarine that have been removed from the model. Also, external pressure loads are applied radially around the entire pressure hull shell. Figure 9: Depiction of the Location of End Load and Displacment Boundary Conditions 10 The nodal end load boundary conditions are applied axially to the aft end of the model and represent the total pressure load exerted over the circumferential area of the submarine that has been removed. Therefore, the nodal end load that is applied can be calculated using the equation below, where p is the hydrostatic pressure, Ac is the circumferential area removed, R is the radius at the shell mid-surface, and n is the total number of nodes for which the end load is being applied: End Load = p*Ac/n = p*π*R2/n (2) The displacement boundary conditions in the evaluation are applied on the forward end of the model using nodal displacements restricting certain directional movements. These are applied as constrained, or fixed, boundary conditions. This is discussed in more detail in the upcoming paragraphs. The coorindate system for the sketch in Figure 9, and all FEMs used herein, is as follows: x-axis: fore/aft direction with zero being at the models forward perpendicular y-axis: up/down with zero being at the models main axis of revolution z-axis: left/right or athwartship (port/starboard) with zero being at the models main axis of revolution The longitudinal location at which the boundary conditions will be applied are such that they are at a midbay (the location half way between two consecutive webs). This is because the deflected shape of the shell is sinusodal, with the midbay being the plane of symmetry. A depiction of this can be seen in Figure 10. 11 Figure 10: Depiction of the Location of End Load and Displacement Boundary Conditions in Relation to Frame Locations Figure 11 presents an isometric view showing an FEM example of the end load and displacement boundary conditions. End loads are shown in yellow and applied to the aft end of the model, while displacement are shown in blue and are applied to the forward end of the model. Figure 11: Example FEM Showing End Load and Displacement Boundary Conditions 12 Based on the mesh density of the shell, the number of nodes (n) at which the end load is applied varies. Therefore, while the total end load stays constant for FEMs with different mesh densities, the nodal end load applied to each node can vary. The displacement boundary conditions restricting directional movements are applied along the same y-z plane to represent the area of the submarine that has been removed from the model. The displacements for the nodes on the y-z plane of the model where it has been cut are as follows: For all nodes in the y-z plane, the displacement in the x axis, and the rotations in the x, y and z axes are fixed (constrained to zero movement). These boundary conditions are used due to the plane of symmetry for the deflected shape, where the displacement is expected to be entirely radial. This is the point of maximum deflection, so no rotations are expected. The points at top centerline and bottom centerline will have a fixed boundary condition in the z axis, as the deflection at these locations is completely vertical, with no z displacement expected. To the same fact, the points at ships centerline on the port and starboard sides will have a fixed boundary condition in the y axis, as the deflection at these locations is completely side to side, with no y displacement expected. Figure 12 shows an engineering sketch depicting these displacement boundary conditions. Figure 12: Section View at Cut Plane Showing Location of Displacement Boundary Conditions 13 The two remaining finite element assumptions required before results can be obtained are to determine the size of the model (how many frames and frame bays are required to be modeled) and to perform a mesh convergence study. These evaluations are documented in Appendix B. 14 3.0 RESULTS/DISCUSSION 3.1 Closed Form Solution Appendix A presents the input and output values, as well as the equations, used in the closed form analysis. As shown in Table A.2 of Appendix A, the closed form evaluation shows the peak compressive stress on the internal face of the flange is 94.79 ksi, which will be used in Section 3.2 to confirm the FEA solution for the baseline model. The peak compressive stress of 94.79 ksi is less than the 95 ksi stress allowable presented in Section 2.2. Therefore, since the peak stress is less than the maximum allowable stress, the initial design is acceptable. 3.2 Finite Element Analysis Results 3.2.1 Baseline Model Results Mesh and boundary condition convergence studies were conducted for the baseline model, as presented in Appendix B. The baseline FEM results in a peak compressive stress on the internal face of the flange of -94.69 ksi. The peak compressive stress of -94.69 ksi determined by the FEA is within 0.11% of the peak compressive stress determined by the closed form analytical solution presented in Section 3.1. This percent difference is considered adequate for the level of accuracy required for pressure hull structure design. 3.2.2 Model Iteration Results The web and flange tilt were varied by 0.5 degree intervals until the resulting peak compressive stress in the frame exceeded the 100 ksi allowable. The results of this evaluation are presented in Table 1. Table 1: Web and Flange Tilt Model Iteration Results Web and Flange Tilt (Degrees) 0.0 0.5 1.0 1.5 2.0 Peak Compressive Stress in Frame (ksi) -94.69 -96.36 -97.87 -99.38 -101.42 15 As shown in Table 1, the peak compressive stress in the frame exceeds the allowable requirement of 100 ksi at a web and flange tilt of 2.0 degrees, which resulted in a peak compressive stress of -101.42 ksi. Stress plots showing the condition for the 2.0 degree web and flange tilt are provided in Figures 13 and 14. Figure 13 shows an isometric view of the web and flange of the FEM, so only the shell elements have been removed. The fringe plot scale can be seen on the right side of the plot. Figure 14 shows a zoomed in view from the Figure 13 plot and shows the location of the peak compressive stress in the flange. Figure 13: FEM Results for 2.0 Degree Web and Flange Tilt Condition 16 Figure 14: FEM Results for 2.0 Degree Web and Flange Tilt Condition Showing the Peak Compressive Stress in the Flange For informational purposes, Figure 15 shows the un-deflected and deflected shape of the FEM for the 2.0 degree web and flange tilt condition. Figure 15 is an elevation view cut down the center of the model, with the deflected shape at 20 times magnification Un-Deflected Shape Deflected Shape Figure 15: Un-deflected and Deflected Shape of FEM at 2.0 Degree Web and Flange Tilt Condition 17 4.0 CONCLUSIONS The results presented herein demonstrate the increase in stress as a result of imperfect geometry in a plate/stiffener assembly, which could exist in real world applications such as frames in a submarine pressure hull. Imperfect frame geometry, mainly the tilt of the web in relation to the pressure hull and the flange in relation to the web, is unavoidable in the construction/fabrication process and results in an increase in stress in the frame due to a modified load path. During typical initial design, these deficiencies are not taken into account, as the assembly is analyzed as having perfect geometry. However, in this evaluation, an initial design was performed on a pressure hull shell application using a closed form solution to create an assembly that contains a 5% allowance in the peak compressive stress in the frame. Specifically, design requirements were chosen such that the material does not enter into the inelastic region, or in this case, above 100 ksi. The initial closed form solution resulted in a peak compressive stress in the frame of -94.79 ksi, which results in an acceptable initial design. Using 2-dimension quadrilateral elements, the initial design was constructed using FEA to validate the closed form solution and allow for modifications of the stiffener geometry. The baseline FEM resulted in a peak compressive stress in the frame of -94.69 ksi, which has a percent difference from the closed form solution of 0.11%. A difference of 0.11% is considered adequate for the level of accuracy required for pressure hull structure design. The baseline FEM was then modified by varying the angular offset of the web to the pressure hull and the flange to the web until a peak compressive stress exceeded the 100 ksi allowable limit. Using this approach, a web and flange tilt of 2.0 degrees resulted in a peak compressive stress of -101.42 ksi, which exceeded the allowable by 1.42 ksi, while a web and flange tilt of 1.5 degrees resulted in a peak compressive stress of -99.38 ksi, which is within the allowable limits. Therefore, for the pressure hull design evaluated herein, the specification documentation shall require a web and flange tilt of less than or equal to 1.5 degrees to assure yield of the material is not exceeded, which could result in failure of the design. The 1.5 degree requirement for web and flange tilt is within the capabilities of welding and assembly of typical pressure hull submarine structure. Knowing the allowable web and flange tilt tolerance permits engineering, design and trades personnel to make informed 18 decisions about construction of the pressure hull. During measurement of these geometrical properties, any value below 1.5 degrees for web or flange tilt can be accepted without requiring rework of the structure. Additionally, steps can be taken in the fabrication and assembly processes to utilize this tolerance to construct the submarine while taking into account quality, time and cost. 19 5.0 REFERENCES [1] John G. Pulos and Vito L. Salerno, Axisymmetric Elastic Deformations and Stresses in a Ring-Stiffened, Perfectly Circular Cylindrical Shell Under External Hydrostatic Pressure, Department of the Navy David Taylor Model Basin, Report 1497, dated September 1961. [2] MSC Software Corporation, Patran, Version 2010.2.3. [3] J. F. Waters and M. L. Woratzeck, CMT-2.1.1 Input Formats/Data Entry, General Dynamics Electric Boat Division, dated March 1984. [4] F. Beer, F. Johnston and J. DeWolf, Mechanics of Materials, Forth Edition, McGraw- Hill, dated 2006. 20 APPENDIX A: SUPPLEMENTAL CALCULATIONS A1 A1.0 PURPOSE The purpose of this Appendix is to provide the supplemental calculation for the evaluation discussed in Section 2.3 and the results documented in Section 3.1. This appendix will show the calculations performed to determine the peak compressive stress on the internal face of a nominal stiffener flange. A2.0 RESULTS The calculation for the total section area, total section centroid (Reference [1]), nondimensional parameters (Reference [4]) and peak compressive stress on the internal face of a nominal stiffener flange (Reference [4]) are given as follows. Symbols for inputs used in this section can be seen in the Nomenclature section of this paper. A2.1 Total Section Area Area of Plating = Ap = Lf*h (3) Area of Web = Aw = b*(d-tf) (4) Area of Flange = Afl = wf*tf (5) Area of Frame = Af = Aw + Afl (6) Total Section Area = At = Ap + Af (7) Centroid of Plating = yp = d + 0.5*h (8) Centroid of Web = yw = tf + 0.5*(d - tf) (9) A2.2 Total Section Centroid Centroid of Flange = yfl = 0.5*tf (10) Total Section Centroid = yt = ((Ap*yp)+(Aw*yw)+(Afl*yfl))/At (11) Radius at Frame Center of Gravity = Rcg = R – h – d + yt (12) A2.3 Non-Dimensional Parameters Aeff is the effective cross-sectional area of the frame, which is given by: (13) A2 α is the ratio of the effective frame area to shell area, which is given by: (14) β is the ratio of the flange width to frame spacing, which is given by: (15) is the shell stress parameter, which is given by: (16) The following non-dimensional parameters are introduced to calculate the stress function of the load and gemoetry of the shell: (17) (18) ϴ is the shell flexibility parameter, which is given by: (19) Where L is the unsupported length of shell, which is given by: L = Lf - b (20) F1 is the stress function of the load and geometry of the shell, which is given by: (21) A2.4 Direct Compressive Stress Finally, σ is the direct compressive stress on the internal face of the stiffener flange, which is given by: (22) A3 Where Rf is the radius to the inside face of the flange, which is given by the following: Rf = Ro – h – d (23) Table A.1 shows the input values used in this appendix. Table A.2 shows the results of the equations documented in this appendix. Table A.1: Input Values for Appendix A Calculations Symbol Ro Value 180 Units in R 179.25 in Rf 168.5 in h 1.5 in Lf 30 in L b d 29.5 0.5 10 in in in tf 0.7 in wf 6 in p 1100 psi E v 3E+07 0.3 psi - Table A.2: Output Values for Appendix A Calculations Symbol Value Area Units Ap 45.0 in2 Aw 4.7 in2 Af l 4.2 in2 Af 8.9 in2 At in2 yp 53.9 Centroid 10.8 yw 5.4 in yf l 0.4 in yt 9.5 in in Rcg 178.0 in Non-Dimentaionl Parameters in2 Aef f 8.914 η1 0.198 0.017 0.433 0.377 - η2 ϴ 0.598 2.313 - F1 0.776 - σ Stress 94.79 ksi A4 APPENDIX B CONVERGENCE ANALYSES B1 B1.0 PURPOSE The purpose of this appendix is to provide the results from the two initial evaluations performed to determine the most accurate baseline model to use in this evaluation. These two evaluations are a boundary condition evaluation and a mesh convergence study. These evaluations support the FEA results presented in the main body of this paper. B2.0 RESULTS/DISCUSSION B2.1 Boundary Condition Evaluation Based on the location of boundary conditions, they can have a local effect on the FEM and impact the results. Therefore, this evaluation determined how many frame bays were required to produce results that are far enough away from the boundary conditions to not have an effect. This was accomplished by comparing the peak stress in the flange to the closed form solution. The FEM used in this evaluation used all of the same modeling assumptions discussed in the main body of this report, which includes materials, thickness, geometry, loading and boundary conditions. The FEM used for this evaluation (titled AppendixB.BC.Eval.cdb) modeled six stiffeners, which was determined to be a large enough to mitigate any boundary condition effects. Figure B.1 shows the location of each frame in relation to the boundary conditions and end loads. Figure B.1: Section View of Pressure Hull Showing Frame Number Location B2 The results for this evaluation are shown in Table B.1, which presents the peak stress in the flange at each frame location, as well as a percent change in stress from the adjacent frame. Table B.1: Summary of Peak Stress and Deflection for Boundary Condition Evaluation Frame # Frame Stress (ksi) % Change 1 -92.56 2 -94.21 1.78 3 -94.35 0.15 4 -94.32 0.03 5 -94.32 0.00 6 -94.32 0.00 B2.2 Mesh Convergence Study The mesh used for modeling FEM elements can affect the FEM and therefore impact the results. If a mesh is too fine or too coarse, the results can be uncertain. Additionally, the finer the mesh, the longer the model run time, so a mesh that is too fine can be unnecessary and lead to extensive analysis run time. Thus, this convergence analysis was performed to assure the element size and mesh density of the FEM is such that it provides the most accurate results compared to the analytical closed form solution. The mesh convergence study was only performed on the baseline FEM and not the subsequent web and flange tilt modified FEMs, as all of the models have the same geometrical dimensions, excluding web and flange angular tilt. It can be assumed that the results of the mesh convergence study performed for the baseline FEM provides the same level of accuracy as with the modified FEMs. As with the model discussed in Section B2.1, the FEMs evaluated in this study used all of the same modeling assumptions discussed in the main body of this report, which includes materials, thicknesses, geometry, loading and boundary conditions. There are several geometric properties that result in initial constraints to this convergence study. The constraints used for determining the number of elements in the mesh and thus the size of the elements are as follows: For the elements used to model the pressure hull shell, the longitudinal size of the elements as they relate to the distance between the webs was chosen such that the B3 number of elements was a multiple of four. This is because based on the expected deflection of the shell being sinusoidal, the maximum deflection is located half way between the webs, and the points of inflection for the deflected shape of the shell are located at one quarter and there quarters between the webs. Therefore, the mesh was chosen so that nodes were located at these locations to most accurately represent the expected deflection. An engineering sketch showing this can be seen in Figure B.2. Figure B.2: Elevation View Showing Typical Frame Bay Deflection The number of elements chosen for the circumferential extent of the shell was the same for the flanges and webs. The flange uses an even number of elements so that nodes could be evenly spaced and will line up at the intersection of the web and flange. Based on these constraints, four convergence models were evaluated with the number of elements and corresponding element sizes as shown in Table B.2. The sketch provided in Figure B.3 depicts the column titles of Table B.2. B4 Table B.2: Number of Elements and Element Size for Convergence Analysis Model Name Converge1.cdb Converge2.cdb Converge3.cdb Converge4.cdb Shell # of Elements Circumferentially Longitudinally Per Bay 120 = 3 degrees 4 180 - 2 degrees 4 270 - 1.5 degrees 8 360 = 1 degrees 8 Web Height Flange Width Size (in.) # of Elements Length (in.) # of Elements Length (in.) 9.4 x 6.3 x 4.2 x 3.1 x 7.5 7.5 3.8 3.8 2 3 3 4 5.2 3.5 3.5 2.6 2 2 4 4 3.5 3.5 1.8 1.8 Figure B.3: Description Key for Table B.2 Column Titles The results for this evaluation can be seen in Table B.3, which presents the peak stress in the flange for each of the four convergence models, as well as a percent change from the closed form solution of -94.79 ksi presneted in Appendix A. Table B.3: Summary of Peak Stress and Deflection for Convergence Study B3.0 CONCLUSION Based on the results presented in Table B.1, the peak flange stress in each frame is within 2% of one another. However, between the fourth and fifth frame, there is no change in percent difference (when rounding values to two decimal points), meaning that the accuracy of the results at the fifth frame is no better than that shown at the fourth frame. Therefore, for the B5 evaluation documented in the main body of this report, all of the FEMs will be modeled with four frames. Although the models could be performed with more frames and lead to similar results, this is not necessary and would lead to increased modeling time and analysis run time. The peak stress results will be evaluated at the fourth frame away from the boundary conditions as this is determined to be within the accuracy required for this analysis. Based on the results presented in Table B.3, the peak flange stress in each convergence model is less than or equal to 0.50% different from the closed form solution pressneted in Appendix A. However, the model with the smallest percent difference is Converge4.cdb, with a percent difference of 0.11%. This model is constructed with the tightest mesh density, so it contains the samllest quadratic elements and the largeest number of total elements out of the four convergence models. Due to the relatively small number of nodes and elements in the convergence models, there is no significant cost or time increase due to the tighter mesh desnity in the convergnece models. Therefore, for the evaluation documetned in the main body of this report, all of the FEMs will contain a mesh density equivalent to that of the Convere4.cdb model, which is shown in Table B.2. B6