Proceedings of the 7th Annual ISC Graduate Research Symposium ISC-GRS 2013
advertisement

Proceedings of the 7th Annual ISC Graduate Research Symposium
ISC-GRS 2013
April 24, 2013, Rolla, Missouri
Lei Wang
Department of Electrical and Computer Engineering
Missouri University of Science and Technology, Rolla, MO 65409
SENSOR NODES LOCALIZATION USING CELLULAR NETWORK
ABSTRACT
Distributed sensing and control schemes employ wireless
sensor networks (WSNs) to process and often geographically
map the measurements. Both the communication schemes and
applications relay on geographical info to optimize
performance, for example geographic routing (GR). Common
localization solutions relay on GPS system thus incurring
unacceptable cost. Moreover, GPS fails in an indoor or noisy
environment. We propose using low cost, RSSI-based, cellular
network-based localization scheme to support geographic
optimization of sensor and control networks. Traditional RSSIbased trilateration localization algorithms estimate radial
distance using signal strength. However, in a realistic scenario,
the RSSI measurements are distorted due to multipath fading
thus introducing error in radial distance estimation. Moreover,
the cell tower geometry will also affect the localization
accuracy. The proposed scheme employs (a) Bias Corrected
Radial Distance Estimator (BCRDE) to estimate the radial
distance in presence of a multipath fading; and (b) a
Localization Error Indicator (LEI) to estimate the combined
localization error with consideration for both the geometry of
the tower used in trilateration and the fading effect. Simulation
result shows that combined BCRDE and LEI improves overall
localization accuracy by about 80%.
1. INTRODUCTION
WSN is widely used in modern environment monitoring,
industrial sense-and-control, prognostic, and diagnostic
systems. Accurately locating or tracking the sensor nodes is one
of the most challenging but important requirements. In
application layer, it helps to localize the source of the critical
information. In the WSN protocols, the geographic localization
is often used to improve the performance of network protocols,
for example geographic routing [14][15][16] .
The proposed sensor nodes localization scheme exploits
the existing and ubiquitous cellular network while not requiring
subscription and associated costs. Sensors measure signal
strength from at least three towers and perform trilateration to
locate their position of. We exploit existing cellular network
which is prevalent around the globe. The cellular networks are
deployed in 220 countries by nearly 800 mobile operators [2]
and provide coverage for more than 90% of the world
population [1]. Also, the cellular signal can penetrate into
building where GPS system fails. Moroever, the scheme
requires a simple hardware to measure the received signal
strength indicator (RSSI) from cell towers. The signal
processing and localization is implementing in software. Hence,
such a cellular network based localization system is an
economic solution of locating and tracking the sensor nodes in
WSN.
According to specific techniques used to sense and
measure the location of the mobile station (MS) in particular
environment under observation, types of measurement can be
grouped into four classes: Time of Arrival (TOA), Time
Difference of Arrival (TDOA), Angle of Arrival (AOA),
Receive Signal Strength Indicator (RSSI) [9]. Comparing to
angle and time based techniques, RSSI based solution does not
require directional antennas or extra time synchronization
hardware.
The challenge in RSSI based positioning system is that due
to the reflection, diffraction, and scattering effect from the
environment, multiple copies of the electromagnetic signal
arrive at the receiver antenna from different directions. Their
superposition at the receiver results in multipath fading [10].
Moreover, time-varying nature of the channel and fading leads
to uncertainties in the signal strength and quality. The variance
and uncertainties of signal strength due to the fading translates
into error in the RSS-based distance estimation. Traditionally,
the researchers tune the power model to suite a specific
environment. However, those approaches often assume timeand location-independent, fixed models. Hence, they fail in
realistic scenarios with varying fading and mobility.
In contrast, in our proposed radial distance estimation
method, the Rician-K factor which representing the signal to
interference (multipath fading) ratio and depending on the
environment, is to be estimated. Therefore the bias due to the
effect of multipath fading in conventional radial distance
estimation is being corrected online by using BCRDE.
Localization Error Indicator (LEI) is based on spatial
modeling of localization error in relation to the position of the
anchor nodes (cell towers). The previous work [5] aimed at
using the equilateral triangle tiles to cover a target workspace
1
while minimizing the number of anchor nodes. The scheme was
constrained by a predefined localization error that was
estimated offline based on the worse case localization error. In
contrast, LEI calculates the accuracy of the position estimation
for already deployed cell tower triplet combinations. The LEI
evaluates each viable cell tower triplet (the combination of
three cell towers). The triplet which gives the lowest LEI value
is selected since it guarantees the lowest localization error,
which was shown theoretically.
In summary, the scheme estimate radial distance using Bias
Corrected Radial Distance Estimator (BCRDE) and optimizes
set of cell tower for trilateration using LEI metric. The BCRDE
scheme estimates radial distance estimation error due to
multipath fading by statistically analyzing the RSSI variation
over time.
2. METHODOLOGY
We validate our scheme in simulations and assume
availability of a database with basic info about cell towers
including RF frequency/channel, transmission power, type of
environment, etc. In practice, this database is established by
measuring and offline processing/modeling. The online sensor
node localization scheme is illustrated in Figure 1.
Simulated signal strength
from cell IDs
Cell combination & Radial
distance estimation
Select optimal triplet
using LEI
Trilateration
Figure 1 Flow diagram of the localization scheme
The database includes a model of signal strength variation
with distance, tower positions, and corresponding Cell IDs. In
general, such database can be obtained from network operators,
federal agency (e.g. FCC), or by measurements. Relationship
between distance and received power can be either collected
through power-profile measurements or estimated based on
terrain topology, type of environment, transmission power and
radiation pattern.
In our simulation, we take the basic channel model, the
Friis transformation equation [11]:
𝑙0 1/𝑛
𝑅 = ( 2)
𝐴
1/𝑛
= 𝐺 ⁄𝑃
(1)
where 𝑅 is a radial distance from receiver antenna to
transmitting antenna, 𝑙0 is the Friis transmission factor, n is the
⁄
path loss distance coefficient. 𝐺 = 𝑙01 𝑛 is propagation gain
2
(loss) and 𝑃 = 𝐴 is the received signal power in Watts.
Therefore the database contains the propagation gain and path
loss distance coefficient.
In traditional RSS-based localization methods, such model
(1) is employed to estimate the radial distance based on the
measured received signal strength (RSS). However, in practice,
multipath signal propagation affects received signal strength
thus rendering this model invalid. Consequently, we have
derived the BCRDE that minimizes localization error due to
multipath fading
The sensor nodes are located using radial distance
estimation from RSS and trilateration algorithm. First, the best
set of three anchor nodes (cell towers) is selected using
Localization Error Indicator (LEI) such that the localization
error is minimized. In many localization systems, including a
cellular network, there is more than one set of three anchor
nodes (cell towers) that can be employed in trilateration.
Typical cellphone measures signal strength from several
neighbor cells for both location tracking and handoff
procedures. We employ frequency and spatial diversity present
in cellular networks to improve the localization accuracy.
Typically, each physical tower includes multiple cells operating
at different frequencies and using different antenna sets.
Coverage of those cells overlap with each other and with
adjacent towers. Consequently, cellular signal receiver onboard
sensor at a typical location has multiple cell triplets available
for trilateration. This introduces additional diversity that is
known to enable localization accuracy [4][5][6]. The LEI
metric will indicate which cell triplet minimizes localization
error.
And the proposed scheme estimate radial distance by using
BCRDE rather than traditional averaging the received signal
strength or power. Conventional radial distance estimation
employs a channel propagation model to describe an average
power decrease with distance. Regardless of the granularity and
accuracy of such propagation model, the radial distance
estimation includes temporal and spatial fluctuation of RSS.
Such a channel uncertainty both in time and space domain
injects error into the estimation. Hence, we introduce the
BCRDE to estimate the radial distance in the channel model
due to multipath, Rician fading.
The proposed scheme is validated by simulation.
3. LOCALIZATION ERROR ESTIMATION
The LEI metric [3] is proposed to identify the best cell ID
triplet that minimizes the localization error. It is defined as the
square root of the total variances of the estimated covariance
parameter matrix.
𝐿𝐸𝐼𝑆 = √𝑇𝑟{𝑊𝑆 (𝐴𝑆𝑇 𝜓𝑆−1 𝐴𝑆 )𝑊𝑆𝑇 }
(2)
2(2−𝑛1 )
where S is the particular triplet, 𝜓 = 𝑑𝑖𝑎𝑔 (𝜎12 𝑟1
2(2−𝑛 )
2(2−𝑛 )
/𝑛12 ,
2
3
𝜎22 𝑟2
/𝑛22 , 𝜎32 𝑟3
/𝑛32 ) , and 𝜎𝑖2 , 𝑛𝑖 , 𝑟𝑖 (𝑖 = 1,2,3)
represent variance of radial distance estimation, Friis
transmission equation exponential factor, radial distance
estimation separately from MS to 𝑖 𝑡ℎ cellular tower within S.
2
Since under strong LoS (K>9), the variance of estimated
radial distance is proportional to the true distance.
σ2i = 𝑉𝑎𝑟(𝑟̂)
𝑖 ≈
4
𝑟2
𝑛2 𝐾 𝑖
(3)
where σ2i , 𝑟̂𝑖 , n, K, 𝑟𝑖 are the variance of estimated radial
distance, estimated radial distance, modeled Friis transmission
factor, Rician K factor, true radial distance, separately to the ith
BS (tower).
Therefore the inverse of weighting matrix (𝜓 −1 ) for the
constrained weighted least square (CWLS) estimation of X is:
4
2(3−𝑛1 )
𝑟
,
𝑛14 𝐾1 1
𝜓 = 𝑑𝑖𝑎𝑔 (
⋯
4
4
2(3−𝑛𝑖 )
2(3−𝑛𝑁 )
𝑟
, ⋯ , 4 𝑟𝑁
)
𝑛𝑖4 𝐾𝑖 𝑖
𝑛𝑁 𝐾𝑁
(4
3.2. LEI performance
In our simulated map, a geometrically irregular cell tower
triplet is created. In the particular vicinal region we estimate the
magnitude of error by using LEI. The result is shown in Figure
2.
Figure 3 Moving trajectory of sensor node (left: across the center of
cell tower triplet; right: across one edge of the triangle)
The magnitude of LEI error indicator and true/actual
trilateration error is shown in Figures 4 and 5 respectively.
30
Actual trilateration error
LEI estimated error
Magnitude of errors
25
20
15
10
5
0
0
10
20
30
Positions indexes
40
50
Figure 4 Actual trilateratioin error and LEI indicator when sensor node
across the center of the triplet
25
Actual trilateration error
LEI estimated error
Magnitude of errors
20
Figure 2 LEI magnitude of an irregular cell tower triplet
In order to validate LEI, the tracked sensor node is moved
across the center of the triangle created by the towers, which is
shown on left side of Figure 3. Another scenario includes
sensor node moving across one edge of the triangle as shown
on right side of Figure 3.
15
10
5
0
0
10
20
30
Positions indexes
40
50
Figure 5 Actual trilateratioin error and LEI indicator when sensor node
across one edge of the triplet
Overall, the value of LEI does not directly translate into
the trilateration error value. However, it is a good relative
indicator of how large is the localization error. Therefore, given
several possible cell tower triplet (position of three cell towers
within the range) it is possible to compare and identify the best
triplet with lowest error. Moreover, the LEI metric includes the
radial distance estimation error info from BCRDE thus taking
into account multipath fading-caused error. Overall, the LEI
minimizes localization error by selecting the best triplet of
reference towers for trilateration.
3
4. BIAS
CORRECTED
RADIAL
DISTANCE
ESTIMATOR (BCRDE)
In multipath fading channel, the BCRDE (𝑅̂ ) is defined as:
𝑛2 𝐾
𝑅̂ =
𝑑̅
(5)
𝑛2 𝐾+𝑛+2
where K is the Rician K-factor, n is the Friis exponential
1
coefficient, and 𝑑̅ = ∑𝑁
𝑑 , 𝑑𝑖 is the estimated radial
𝑁 𝑖=1 𝑖
distance based on received signal power and Friis equation.
4.1. Bias in traditional radial distance estimation in
multipath fading channel
Traditionally radial distance is estimated by the average of
calculated radial distance from Friis equation (1).
1
𝑑̅ = ∑𝑁
𝑑
(6)
𝑁 𝑖=1 𝑖
where 𝑑𝑖 is the estimated radial distance.
The bias of the traditional radial distance estimation can be
calculated
as
𝐵𝑖𝑎𝑠(𝑑̅ ) = 𝐸[𝑑̅ − 𝑅] = 𝐸(𝑑̅ ) − 𝐸(𝑅) .
Substituting mean of the radial distance estimation with (9), the
bias is equal to:
𝐵𝑖𝑎𝑠(𝑑̅ ) =
+
2
2(𝑛+2)𝜎𝑋
𝑛2 𝑙0
Table 1 Average error (over different SIR [0.1, 100] (dB)) of BCRDE
and average estimator
Num. of samples
50
500
1000
10000
Avg. Err. of BCRDE
89.7109
35.6467
19.3642
12.7613
Avg. Err. of Avg. Est.
78.0992
84.1138
85.1651
83.2749
1000
900
1
𝑙 𝑛+1
( 02)
𝐴
𝑙
−𝑅
850
(7)
1/𝑛
From Friis transmission equation 𝑅 = ( 02) , where 𝐴2
𝐴
is direct LoS signal power, and 𝑛 is the exponential coefficient.
Now, lets consider that the K-factor of the multipath fading is
given by 𝐾 =
𝐴2
2
2𝜎𝑋
Actual radial distance
BC, N=000050
Mean, N=000050
BC, N=000500
Mean, N=000500
BC, N=001000
Mean, N=001000
BC, N=010000
Mean, N=010000
950
Radial distance (m)
1
𝑙 𝑛
( 02)
𝐴
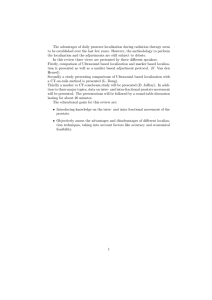
conventional average estimator. The error is shown for varying
signal to interference ratio (SIR). Moreover, Error! Reference
source not found. shows the average error of the two
estimators with increasing sample size (number of measured
RSSI values). For a particular SIR value, the bias of average
estimator does not vary with number of samples included in
calculation. In contrast, BCRDE asymptotically converges to
the actual distance with number of samples included in
calculations. The BCRDE benefits from more samples that
improve the statistical estimation of radial distance error.
800
750
700
650
600
. After transformation and rearrangement, (7)
550
500
0
can be simplified to:
(𝑛+2)
𝐵𝑖𝑎𝑠(𝑑̅ ) = 2 𝑅
Therefore the bias of average estimator in multipath fading
channel is proportional to the inverse of the K, which can be
seen as the signal to interference ration.
The relationship between actual radial distance and average
estimator is:
(𝑛+2)
𝑑̅ = 𝑅 +
𝑅
(9)
20
30
40
50
SNR (dB)
60
70
80
90
100
Figure 6 Performance comparison between conventional average
estimator and BCRDE
(8)
𝑛 𝐾
10
4.4. Accuracy
improvement
in
sensor
node
positioning
Scenario: we simulated eight cell towers, named “SIM00001”
~ “SIM00008”, and six mobile sensor nodes, named “N01” ~
“N06”, to be located. As shown in Figure 7.
𝑛2 𝐾
Thus the bias corrected radial distance estimator is:
𝑑̅
𝑅̂ = 𝑛+2
(10)
1+ 2
𝑛 𝐾
which is coincide with (9).
4.2. Rician K estimation
Since that the bias of average estimator is depending on
rician K factor, the performance of ECRDE will also
depending on the accuracy of estimated rician K. It can be
estimated by using Moment method [4][13],
𝐾=
√𝑃̅−𝑣𝑎𝑟(𝑃)
̅
𝑃−√𝑃̅−𝑣𝑎𝑟(𝑃)
where 𝑃 is received signal power, 𝑃̅ =
(11)
1
𝑁
∑𝑁
𝑖=1 𝑃𝑖 .
4.3. BCRDE performance
Figure 6 shows simulation results. The radial distance
estimation error is compared for both the BCRDE and a
Figure 7 Simulated cell towers and sensor nodes map
In our simulation, we assume that all the nodes are able to
capture signal from all the signal strengths from six cell tower,
we call “cell tower in view”. Therefore, there are altogether 56
4
( 𝐶38 ) viable cell towers triplets. In Figure 8, we show the
average localization error by using all the viable triplets for
particular node. Note that poor relative triplet geometry will
introduce huge localization error. We compared the average
localization error of each node by using BCRDE and traditional
average radial distance estimator.
Figure 8 Average localization error by uisng BCRDE and traditional
average estimator
For all the six nodes, the average localization error of using
BCRDE will be less than traditional average estimator. Overall,
the accuracy of localization has been improved by 60%, from
171.86m to 65.29m.
5. LOCALIZATION RESULT
Follow the same cell towers and nodes configuration
scenario introduced in section 4.4. We evaluate the accuracy of
the proposed scheme with LEI and BCRDE. Figure 9 shows the
optimized triplet (yellow marked triangle) for localization for
each node.
Figure 9 LEI BCRDE localization result
Table 2 Optimal triplet (cell tower combination) selected by LEI of
each node
Node ID Triplet (Cell tower combination)
N01
[SIM0003, SIM0004, SIM0007]
N02
[SIM0001, SIM0005, SIM0007]
N03
[SIM0002, SIM0003, SIM0007]
N04
[SIM0001, SIM0004, SIM0008]
N05
[[SIM0003, SIM0004, SIM0006]]
N06
[[SIM0002, SIM0003, SIM0006]]
The average (average over all viable triplet) localization
error equal to 171.86m for the conventional estimator. In
contrast, the proposed scheme with LEI optimal triplet selection
and BCRDE achieves error equal to 15.61m, which is an
improvement of about 91%.
7. CONCLUSIONS AND FUTURE WORK
In this paper we proposed to use a novel radial distance
estimator, BCRDE, and use LEI to select the optimal cell tower
triplet to improve the localization accuracy of sensor node in
Cellular network. Simulation result shows that BCRDE is
asymptotically efficient, and will improve the overall
localization accuracy by 60%, compare to the conventional
RSS average estimator. And by selecting the optimal cell tower
triplet using LEI metric, the overall localization accuracy can
be improved by about 90%.
8. ACKNOWLEDGMENTS
The authors acknowledge the support of the Intelligent Systems
Center.
9. REFERENCES
[1] GSM, Internet: http://www.gsma.com/gsm/, April, 2012.
[2] Membership, Internet: http://www.gsma.com/membership/
, April, 2012.
[3] L. Wang, M. Zawodniok, "RSSI-based Localization in
Cellular Network," LCN Workshops, IEEE 37th
Conference on, pp820 - 826 Oct. 2012.
[4] M. R. Basheer, and S. Jagannathan, “R-Factor: A New
Parameter to Enhance Location Accuracy in RSSI Based
Real-time Location Systems,” Proc. of the 6th Annual
IEEE Commun. Soc. Conf. on Sensor, Mesh and Ad Hoc
Commun. and Networks, pp. 1-9, Jun. 2009
[5] M. R. Basheer, S. Jagannathan, "A New Receiver
Placement Scheme Using Delaunay Refinement-based
Triangulation,"
Wireless
Communications
and
Networking Conference, WCNC '10. April 2010
[6] M. R. Basheer, S. Jagannathan, "Localization of Objects
Using Cross-Correlation of Shadow Fading Noise and
Copulas," Global Telecommunications Conference,
GLOBECOM, pp. 1-5, Dec. 2011
[7] M. M. Atia, A. Noureldin, and M. Korenberg “Dynamic
onlinecalibrated radio maps for indoor positioning in
wireless local area networks,” IEEE Trans. Mobile
Comput, 2012
[8] Y. Kim, H. Shin, H. Cha, “Smartphone-based Wi-Fi
Pedestrian-Tracking System Tolerating the RSS Variance
Problem,” IEEE International Conference on Pervasive
Computing and Communication (PerCom), pp. 11-19,
2012
[9] C. Drane, M. Macnaughtan, and C. Scott, “Positioning
GSM telephones,” IEEE Commun. Mag., vol. 36, pp. 46–
59, Apr. 1998.
5
[10] M.
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
Paetzold, Mobile Fading Channels: Modelling,
Analysis and Simulation, John Wiley and Sons, 2001.
H. T. Friis “A note on a simple transmission formula”,
Proc. IRE, vol. 34, pp. 254-256, May 1946.
K. W. Cheung, H. C. So, W. Ma, and Y. T. Chan, “A
constrained least squares approach to mobile positioning:
algorithms and optimality”, EURASIP J. Appl. Signal
Process., pp. 150-150, Jan 2006.
L. J. Greenstein, D. G. Michelson, and V. Erceg,
"Moment-method estimation of the Ricean K-factor,"
IEEE Commun. Lett., vol. 3, pp. 175–176, 1999.
Djenouri, D.; Balasingham, I., "Traffic-DifferentiationBased Modular QoS Localized Routing for Wireless
Sensor Networks," Mobile Computing, IEEE Transactions
on , vol.10, no.6, pp.797,809, June 2011
doi: 10.1109/TMC.2010.212
J. Bruck, J. Gao, and A. A. Jiang, “Localization and
Routing in Sensor Networks by Local Angle
Information,” ACM Trans. Sensor Networks, vol. 5,
no. 1, Article 7, 2009.
Mihai Cucuringu, Eigenvector synchronization, graph
rigidity and the molecule problem, Information and
Inference: A Journal of the IMA, vol. 1, 21–67, Dec.
2012
Anguswamy Reghu, Zawodniok Maciej, Jagannathan
Sarangapani, “A Multi-Interface Multi-Channel
Routing (MMCR) Protocol for Wireless Ad Hoc
Networks,” IEEE Wireless Communications and
Networking Conference, pp. 1-6, April 2009.
Demonstration of a Multi-Interface Multi-Channel
Routing Protocol (MMCR) for WSNs using Missouri
S&T Motes LCN Demo, IEEE 35th Conference on,
2012.
J. Fonda, S. Watkins, S. Jagannathan, M. Zawodniok,
―Embeddable
Sensor
Mote
for
Structural
Monitoring,‖ SPIE 15th Annual Int’l Symposium on
Smart Structures/NDE: Sensors and Smart Structures
Technologies for Civil, Mechanical, and Aerospace
Systems 2008, vol. 6932, pp. 69322V.1-69322V.11,
2008.
6