PHYS-1500 PHYSICAL MODELING ...
advertisement

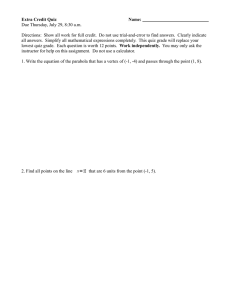
PHYS-1500 PHYSICAL MODELING FALL 2006 Putting a Rocket into Orbit about Earth. The program that models the transfer of a rocket from the surface of Earth into a circular orbit is one of the most complex that has been treated in this course. These notes outline the physics involved, and should help to make the operation of the model more understandable. Briefly, the radius of the orbit into which the rocket is to be inserted must be selected. Then, the program calculates the motion of the rocket while the rocket’s engine is on. At the appropriate time, the engine is turned off, and the rocket coasts, in an elliptical orbit, as its altitude increases. When it reaches the desired altitude, the engine turns on, and injects the rocket into a circular orbit. The program ignores atmospheric drag, but includes the thrust of the rocket engine and the decrease in mass as fuel is expended. The rocket starts on a launch pad, tilted at an angle from dm the vertical. In that configuration, the vertical component of thrust is u cos , and the dt dm dm horizontal component is u sin , where is the rate at which reaction mass is being dt dt dm expelled, and u is the speed of the reaction mass relative to the rocket. The values of , u, and dt can be changed, but a typical initial set is provided. In addition, the rocket is pulled downward GMm by Earth’s gravitational attraction, which is described by the formula, FG 2 . In this r expression, G is the universal gravitational constant, M is the mass of Earth, m is the mass of the rocket, and r is the distance between the rocket and the center of Earth. While the rocket’s engine dm is turned on, the mass of the rocket decreases with time according to the equation m = m0 – t, dt where m0 is the initial mass of the rocket, and t is time. When the gravitational force and the thrust are combined, the net upward (or radial) force on the GMm dm dm u sin . From u cos , and the lateral (or tangential) force is FT rocket is FR 2 dt r dt Newton’s second law, F = ma, the following expressions for the radial and tangential accelerations can be obtained: GM (dm/ dt )u cos (dm / dt )u sin aR 2 aT , and . r m m dm When the engine is turned off, is set equal to zero. However, our model was based on dt energy and angular momentum concepts, so it used more than the accelerations to calculate the motion. In addition, it used polar coordinates, so extra terms came in when accelerations were used. 1 For motion in the tangential direction, the model calculates angular velocity from angular L /m momentum from the equation, L mr 2 , so 2 , where L/m is the angular momentum per r mass. When the rocket engine is off, L/m is a constant so the rocket’s angular velocity is known as a function of position. A key part of the program, is the determination of when the rocket engine should be turned off. That can be found by use of conservation of mechanical energy and conservation of angular momentum. The figure shows the path of the rocket. Point Q represents the farthest point from the center of Earth that the rocket will reach if its engine is turned off and it goes into an elliptical orbit. If the engine is not turned on again at point Q, the rocket will continue in its elliptical orbit and return close to Earth, as shown. To find the value of rQ that will result if the engine is turned off, set the mechanical energy and angular momentum at the rocket’s location equal to the same quantities at point Q. Then, GMm 1 2 GMm 2 1 2 mvQ and mv r mvQ rQ where v v sin . 2 mv r rQ v is the component of v that is perpendicular to the radius, r, and is the angle between the radius and the velocity. Notice that is not equal to , the angle between the direction of the thrust and the radius. At Q, the velocity is perpendicular to rQ, so no sine function is needed. To find rQ, in terms of r and v, eliminate vQ from the two equations and solve for rQ. From the r r second equation we get, vQ v v sin . This can be put into the first equation to give rQ rQ an equation that can be solved for rQ. 2 1 2 2 GMm 1 r GMm mv 2 m v sin r rQ rQ 2 or 2 1 2 GM 1 2 r GM v 2 v sin . r rQ rQ 2 1 1 2GM v2 0 . Rearranging terms yields, vr sin 2GM rQ rQ r This is a quadratic equation for the quantity, 1/ rQ. Its solutions are, 2 2 2 2GM 2GM (2GM ) 2 4 vr sin v2 1 r . 2 2 vr sin rQ If this is inverted, and a few numbers are canceled, the results for rQ are, rQ vr sin 2 . 2 GM 2 GM (GM ) 2 vr sin v2 r The two solutions correspond to the rockets farthest point from Earth, and its nearest point. We want the farthest point, and the negative sign will give the larger answer. Therefore, the correct solution is, vr sin 2 . rQ 2 2GM 2 2 GM (GM ) vr sin v r The program calculates this quantity after every step, and compares the result to the radius of the desired orbit. If the solution is equal to or greater than the radius of the desired orbit, R is set equal to zero, i.e. the engine is turned off. The rocket then travels in an elliptical orbit until its distance from the center of Earth is equal to rQ. At that distance, its engine turns on. However, now the thrust is directed in the tangential direction, at an angle of 90° to the radius. The engine remains on until the speed of the rocket is sufficient to keep it in a circular orbit of the desired radius. That speed can be found by setting the gravitational force equal to the mass of the rocket times the acceleration it would have in a circular orbit of the desired radius. Thus, GMm v2 GM GM . m , then, v 2 and v 2 2 r r r r When the speed reaches that value, the engine shuts off, and the rocket is in a (nearly) circular orbit. Finally, in consideration of the welfare of any passengers or equipment aboard the rocket, the thrust has been made variable. Whenever the acceleration of the rocket exceed 100 m/s2 (about ten times the acceleration of gravity, or 10 “gees”), the rate at which mass is ejected is cut in half, thus cutting the thrust in half. 3