This research is funded by U.S.EPA – Science To Achieve Cooperative
advertisement

This research is funded by
U.S.EPA – Science To Achieve
Results (STAR) Program
Cooperative
# CR - 829095
Agreement
State-Space Models for
Within-Stream Network
Dependence
William Coar
Department of Statistics
Colorado State University
Joint work with F. Jay Breidt
Disclaimer
The work reported here was developed under the
STAR Research Assistance Agreement CR-829095
awarded by the U.S. Environmental Protection
Agency (EPA) to Colorado State University. This
presentation has not been formally reviewed by
EPA. The views expressed here are solely those of
the presenter and STARMAP, the Program (s)he
represents. EPA does not endorse any products or
commercial services mentioned in this
presentation.
Outline
Introduction to the problem
Evolution of state-space models
Likelihood
Missing data
Kalman recursions
EM algorithm
Simulation example
Future work
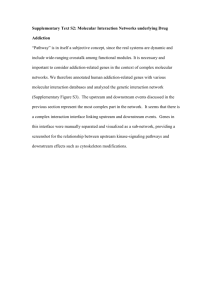
Consider a simple stream network
Y1
Y2
Y5
Y3
Y6
Downstream
Y7
Y4
•Two upstream reaches
merge together to create
downstream reaches.
•Suggests a natural
dependency on upstream
reaches.
•Autocorrelation can arise
from water flowing from
reach to reach.
•Logical ordering in space.
The Beginnings
Expressing a measurement on a reach in terms of
its upstream contributors such that
1
0
0
0
5,1
0
7 ,1
ind
0
1
0
0
5,2
0
7 ,2
where Zi ~ N (0,i2 ).
0
0
1
0
0
0
0
0
1
0
6,3
7 ,3
6,4
7 ,4
0
0
0
0
1
0
0
0
0
0
0
1
7 ,5
7 ,6
0 Y1 Z1
0 Y2 Z 2
0 Y3 Z 3
0 Y4 Z 4
0 Y5 Z5
0 Y6 Z 6
1 Y7 Z 7
The Beginnings
This is also the modified Cholesky decomposition of S-1
T
TST D
Simplifying T can allow for dependencies
similar to autoregressive structures in time series.
For any Y~(µ,S), there exists a unit lower triangular matrix T with
corresponding diagonal D such that TY=Z where Z~(0,D).
ie, a measurement depends only on its two immediate
upstream neighbors.
(7,1 7, 2 7,3 7, 4 0) in the simple example.
Suggestive of a more general state-space model.
Y1
Y2 Y3
Y5 Y6
Y7
Y4
State-Space Model
Define a state-space representation by
Y (t ) Gt X (t ) W (t )
X (t ) Ft ,u1 X (u1 ) Ft ,u2 X (u2 ) V (t )
u2
u1
t
with {W(t)}~N(0,{R(t)}), {V(t)}~N(0,{Q(t)}), and
V(s) uncorrelated with W(t) for all s and t. Further
assume that W(t) and V(t) are uncorrelated with all
X(s1), where s1 is any first order reach.
Downstream Filter
Best mean square predictors under Normality are
X p (t ) E X (t )|Y upstream
X f (t ) E X (t )|Y (t ),Y upstream
Predict X(t) given upstream information
X p (t ) Ft ,u1 X f (u1 ) Ft ,u2 X f (u2 )
u2
u1
tp Ft ,u1 uf1 Ft ,u1 T Ft ,u2 uf2 Ft ,u2 T Q(t )
Update with observed information from Y(t)
X f (t ) X p (t ) Gt tp t 1 (Y (t ) Gt X p (t ))
tf tp tp GtT 1t Gt tp
p T
where t Gt t Gt R(t ).
t
Likelihood
Use the innovations and variances from the downstream
filter
I (t ) Y (t ) Gt X p (t )
t Gt tp GtT R(t )
In the case where data are available for every reach in the
network, the likelihood is easily expressed in terms of these
innovations
1
n
L(Y , ) det j
j 1
2
1 n T
1
exp I ( j ) j I ( j )
2 j 1
where n is the total number of reaches in the stream network.
EM Algorithm
The likelihood for missing data can be difficult to express.
E-Step
The M-Step
Predict, update, smooth based on current estimates of model
parameters.
Form an approximation to the likelihood by filling in the missing
values with smoothed estimates.
Maximization of the approximation to the likelihood in order to
obtain new parameter estimates for the next iteration.
Iterate until revised parameter estimates stabilize.
Since log-likelihood decreases with each iteration, estimates
should converge to MLE.
Upstream Smoother
Start with the very last reach in the network.
Smooth two at a time using information from the filtered as well as
smoothed downstream values.
Estimate X us1 , X us2 based on observations from the entire network with the
conditional expectation E( X u , X u ) T |Y observed .
Recursive relationship results in smoothed estimates
1
2
X s (u1 ) X f (u1 ) Ft ,u1 uf1 p 1 s
p
s
f
f ( t ) ( X ( t ) X ( t ))
X (u2 ) X (u2 ) Ft ,u2 u2
with variance
u2
u1
usi uf (ui ,t )( ts tp ) (ui ,t ) T
i
where (ui ,t ) Ft ,ui ufi ( tp ) 1.
t
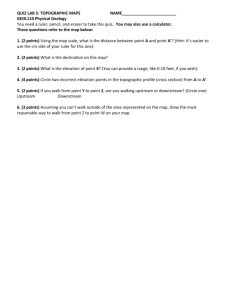
Other Tree Type Smoothers
•Each reach as a parent that creates
two children
Parent
•Existing work Huang & Cressie (1997)
and Chou (1994) for uptree filtering
(fine-coarse) and downtree smoothing
(coarse-fine)
Child
Child
•Model different resolutions
•Assumption that children are
independent conditioned on the parent.
•Violated in the stream network
model considered.
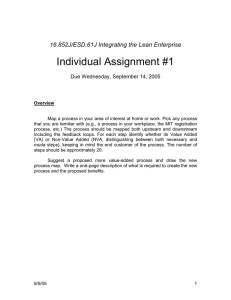
Example
First order reaches up in the mountains
x x
x
x
x
x
x=missing value
Fifth order reach on the plains
Example
Consider a network that has 39 different reaches
20 first order,19 higher order
Let k be the Strahler order of reach t created by two reaches of
order i and j.
State-Space representation of
Y (t ) X (t )
X (t ) k ,i X (ui ) k , j X (u j ) V (t )
with V (t )~ N (0, i2, j ) .
Assumptions about V(t)
Cov(V(s),V(t))=0 for s ≠ t
Cov(V(t),X(s1))=0 for any first order reach s1
Parameter Estimation
Total of 12 parameters to estimate based on 33 stream segments
(6 missing values).
Most parameters will be estimated with few observations.
6 different parameters to estimate in this model.
5 different (conditional) variances to estimate.
1 variance parameter from first order.
Only a few reaches will contribute to estimating each .
Suggests looking at parametric models for .
Need a much larger stream network to achieve more reasonable
parameter estimates.
Kalman Recursions
Downstream Filter (Y(t)=X(t))
Upstream Smoother
The filtered value is either the observed Y(t), or its conditional
expectation given the two immediate upstream filtered values.
Variance is either 0 (if Y(t) is observed) or the prediction error
variance of Y(t) given the two immediate upstream filtered values.
Smooth two at a time, Y(u1) and Y(u2).
Either the observed value or the conditional expectation of
Y(ui) given all reaches with observed measurements.
Need to know the logical order of flow
Parameter Estimates
Iterate
21
31
32
33
43
54
[6,]
0.701
-0.543
0.725
1.087
0.226
-0.526
[7,]
0.703
-0.550
0.723
1.069
0.247
-0.526
[8,]
0.705
-0.578
0.722
1.008
0.280
-0.526
True
.4
.2
.55
.6
.35
.45
12,1
32,1
32,3
22,2
42,4
[6,]
1.245
7.761
0.0087
0.842
1.23e-32
2.951
[7,]
1.250
8.376
0.009
0.746
1.23e-32
2.950
[8,]
1.252
9.030
0.009
0.633
1.23e-32
2.949
True
3
2.5
2
3
1.5
4
2
Smoothed Data Values
1 2
1
2
3
4
5
6
3
[6,]
0.759 0.759 2.891 0.676
-0.147
-1.690
[7,]
0.747 0.747 2.915 0.679
0.405
-1.683
[8,]
0.744 0.744 2.927 0.681
0.992
-1.679
True
0.946 1.029 2.994 0.382
-2.764
-2.415
4
6
5
More iterations in the EM algorithm
Better model for the coefficient parameters
Plot estimates from regression against covariates (regressogram)
Re-compute MLE based on new parametric model suggested by the regressogram
Future Work
Work with real data from larger networks.
Obtain better initial estimates.
Investigate EM convergence.
Use reach-specific covariate information such as
location within a reach, inflow from upstream reaches,
etc.
State space representations that allow for larger classes
of models than the AR structure considered here.
Allow for upstream measurements on the same reach.