jakeway_research_200..
advertisement

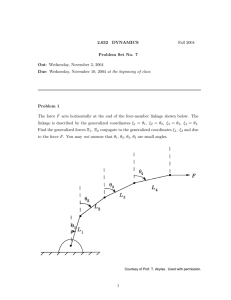
Quadruped Robot Modeling and Numerical Generation of the Open-Loop Trajectory Dan * Jakeway , Prof. Jongeun § Choi , Prof. Ranjan § Mukherjee Michigan State University *Electrical Engineering, Intern §Mechanical Engineering, Advisors Stance Leg Coordinates Introduction • The generalized vector of coordinates is q • T We model a symmetric quadruped gait for a planar robot with actuated hips and knees. The degrees of freedom are reduced to two in the stance leg to simplify analysis and design of the periodic control input of this highly nonlinear state space model. We illustrate the methodology in software for converting the Cartesian coordinates and model parameters of the links’ centers of masses into generalized coordinates to derive the mass-inertia matrix, the Coriolis and centripetal force matrix, and gravity vector in the standard dynamical equations of n-link chains. The generation of the numerically integrated open loop optimal trajectory, which is identical to the feedback linearization of this nonlinear system given a reference signal, is outlined for the quadruped. q ( , ) femur angle w.r.t body shin angle w.r.t. extended femur • The Cartesian coordinates are written in terms of the more desirable generalized coordinates, Fig. 2 illustrates the positions of the generalized coordinates. • We introduce the auxiliary variable to avoid tedious rewriting in hand calculations. • Given the Cartesian coordinates, compute the corresponding Jacobian matrices w.r.t generalized coordinates J Gait • Fig. 1 is the dorsal (top-down) view of the robot • The legs are numbered 1-4 1 2 3 • C1234 C1234 C1234 4 C1234 • The robot will not tip over in the lateral direction when lifting one pair of legs because we restrict to the planar case, which is typically done in experiments anyway (Raibert, Legged Robots That Balance, 1986) • The stance legs are synchronized with each other so that on level ground the body doesn’t dip. This allows us to consider the coordinates of only one stance leg in the analysis, because the contribution of kinetic energy and velocities in the paired leg are identical. q r Fig. 1 Dorsal View of Quadruped Model J , q r J , q • The notation C1234 means legs one and two are aloft in the swing phase, three and four are in stance • Using this notation, our desired gait is: C1234 J r , J (r ) q (r ) • The calculus of variations with the Euler-Lagrange equations on the performance index integrand is the classical method, but this is numerically unstable. •The Pontryagin Maximum Principle is employed, which is a necessary condition for optimality (i.e. the optimal trajectory must satisfy the Maximum Principle but this isn’t sufficient for identifying the global optimum) • We first need to define our performance index which is to be minimized with respect to a trajectory variation, and we must choose our desired time interval. • The state equations are derived from the following: D q C q g u x f ( x, u ) • The co-state differential equations are: ( Jacobian of femur angle) (Jacobian of shin angle) q (r ) J (Jacobian of torso angle) q D m[2 J (q ) J (q) 2 J (q) J (q) J (q ) J (q )] T Optimal Control T T I [2( J )T J 2( J )T J ( J )T J ] , mass - inertia matrix 1 d kj d ki d ij cijk , d ij i - j coord. of D above 2 qi q j qk 1 T T H u u f ( x, u ) 2 H H f T T T f f ( x, u ) x , (u ) x x u • Which are then numerically solved in MATLAB via any of a variety of BVP solvers. • Future Work—a singular analytic Jacobian matrix may arise for common cofigurations, which produces a singularity through the trajectory. Complex code and further research can rectify this problem. Ckj cijk , the k - j coordinate of the Coriolis matrix i T P P m[ g (2r 2r r )] , g (q ) (gravity v ector) q T Fig. 2 Illustration of the State Space Generalized Coordinates





![Pre-class exercise [ ] [ ]](http://s2.studylib.net/store/data/013453813_1-c0dc56d0f070c92fa3592b8aea54485e-300x300.png)