12601170_Visuals.ppt (1.003Mb)
advertisement
")
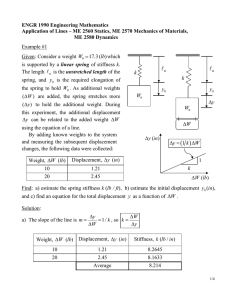
Real Time Integral-Based Structural Health Monitoring I. Singh-Levett1, C. E. Hann1 J. G. Chase1, B.L. Deam2 , J.B. Mander2 1Department of Mechanical Engineering, University of Canterbury, Christchurch, New Zealand of Civil Engineering, University of Canterbury, Christchurch, New Zealand 2Department Introduction • Structural Health Monitoring (SHM) compares a structures condition relative to a baseline state to identify damage • Determining the existence, location and degree of damage is critical after a major event to aid recovery/response – – Visual and localized inspection methods can be complicated or time consuming Just knowing its damaged and having to go check out how much is ok, but requires manpower that may not be available. • Main goal = autonomous ability to determine basic level and location of damage to make a reliable safety/service estimate remotely Current SHM Techniques: • Modal parameter estimation – – insensitive to localized damage and sensitive to noise more suitable to linear structures – computationally intense, not suitable for real-time • Flexibility based methods • Time series methods • Many variations on the above … Benefits of Real-Time SHM • Immediate assessment of instrumented structures • Infer state of non-instrumented structures using fragility relationships • Optimization of response and recovery • Reduction of social and economic impacts and costs Integral SHM – Minimum Requirements • Measurements: – Ground and structural accelerations – Relatively very low frequency displacement (GPS, fibre-Optics or StoreyDrift Extensometers) • Method uses simple Bouc-Wen non-linear model including permanent displacements • Integral-based fitting method – Reformulated D.E.’s in terms of integration of measured/estimated motion – Linear least squares, very fast real-time capability – Robust to noise and modelling error Non-Linear Structural Model • Bouc-Wen Hysteresis Model: Equation of Relative Motion: x , x , x Mx(t) Cx (t) K e x(t) K h z(t) Mxg (t) Permanent displacement is represented by M = Mass Matrix C = Damping Matrix Ke = Elastic Stiffness Matrix Kh = Hysteretic Stiffness Matrix ( x z) x(t) = Displacement x (t) = Velocity x(t) = Acceleration x g (t) = Ground Acceleration z(t) = Hysteretic Displacement - for simulation, Bouc-Wen Hysteresis - for fitting, constant piecewise function model independent Displacement and Velocity via Integration & Correction • To use the model you need all the response quantities, but .. You didn’t measure them – The displacement is initially approximated by double integration of acceleration – Displacement is measured at up to 1-10 Hz • Drift error is corrected every 0.1-1.0 s with measured displacement • However: this gives a discontinuity in displacement every 0.1-1.0 s – Piecewise C(1) continuous cubic curves are fitted to the corrected displacements to “smooth out” the joins at 0.1s intervals. – The velocity and acceleration computed by numerical differentiation of corrected displacements – Important step as ensures displacement, velocity and acceleration are precisely related by differentiation – Otherwise solution is corrupted by the discontinuities Parameter Identification • Integrate of the Equations of Motion (2x) • Discretise changes in stiffness and Bouc-Wen plastic terms • Identify stiffness and permanent displacement from revised equation of motion: k p d (t ) Z (t ) mxg (t ) ma(t ) cv(t ) k p ke k h Z (t ) kh [ z(t ) x(t )] k p = linear stiffness Z (t ) = permanent displacement parameter v(t ) = Estimated Velocity d (t ) = Estimated Displacement a (t ) = Estimated Acceleration Result = Least Squares Solution • Enabled by piecewise parameter variation kp Z Ai 1 bi Z 2 Z3 d (ti1 ) 1 0 0 A i d (ti 2 ) 0 1 0 d (ti3 ) 0 0 1 mxg (ti1 ) ma(ti1 ) cv(ti1 ) b i mxg (ti 2 ) ma(ti 2 ) cv(ti 2 ) mx (t ) ma(t ) cv(t ) g i3 i3 i3 Algorithm Output • Least squares procedure yields solution vector: kp Z 1 Z 2 Z 3 • Can calculate estimated permanent displacement from results and BoucWen formulation: D Z k h 1 1 Fitting Algorithm Overview 1. Measure displacement at low sampling rate and acceleration at high rate • • 2. Low = 1-10Hz High = 1+ kHz Estimate displacement via 2x-integration at high sampling rate • Correct high frequency displacement using low frequency displacement, and obtain velocity and acceleration. 3. Create system of linear equations by piecewise discretisation of unknowns over time at useful rates/intervals of expected change 4. Find unknowns using linear least squares 5. Estimate permanent displacements from results 6. Repeat for all time periods of interest Results – Simulated Data • Single DOF system with linear stiffness of 39.58N/m – 1s Period • 10% uniformly distributed noise on all measurements • Stiffness identified over 2s intervals, permanent displacement over 0.4s intervals -3 45 2 Actual Stiffness Fitted Stiffness -2 Permanent Displacement (m) 35 30 Stiffness (N/m) True Identified 0 40 25 20 15 10 -4 -6 -8 -10 -12 -14 5 0 0 x 10 -16 10 20 30 Time (s) 40 50 60 -18 0 10 20 30 Time (s) 40 50 60 Generalises to MDOF • 1-DOF algorithm is generalised for N-DOF situation N m1x1(t ) c1,b xb (t ) ke(2) [ x1(t ) x2 (t )] ke(1) x1(t ) kh(2) z2 (t ) kh(1) z1(t ) m1xg (t ) b 1 Bottom Storey N mw xw (t ) cw,b xb (t ) ke( w) [ xw (t ) xw1 (t )] ke( w1) [ xw (t ) xw1 (t )] b 1 Intermediate Storeys kh( w) z w (t ) k h( w1) z w1 (t ) mw xg (t ) , w 2,.., N 1 N mN xN (t ) c N ,b xb (t ) ke( N ) [ x N (t ) x N 1(t )] kh( N ) z N (t ) mN xg (t ) b 1 Top Storey • Taking a cumulative sum removes unknowns (by telescoping terms) giving a generalised equation for any storey w : Non-Linear Frame •Four storey structure designed to demonstrate dynamic response •Replaceable plastic hinges •1/5th scale structure subjected to El Centro record Steel Frame - Stiffness •Identified stiffness compares well to pushover analysis results •Similar behaviour observed for all storeys •Discrepancy in final stiffness value attributed to strain hardening and strain rate effects 5 10 x 10 Actual Stiffness Fitted Stiffness 9 8 Stiffness (N/m) 7 6 5 4 3 2 1 0 0 5 10 15 Time (s) 20 25 30 Steel Frame - Yielding •Initial and final residual deformations are accurately captured •Two major yields identified, both occur during peaks in displacement •Final residual deformation identified to within 1.5% of true value for all storeys Re-simulation – The ultimate check Comparison of Measured and Resimulated Top Storey Displacements Comparison of Measured and Resimulated Top Storey Displacements 0.03 Measured Resimulated Measured Resimulated 0.015 0.02 0.01 0.01 Displacement (m) Displacement (m) 0.005 0 -0.01 0 -0.005 -0.02 -0.01 -0.03 -0.015 -0.04 0 5 10 15 Time (s) 20 25 30 9 10 11 12 13 Time (s) • Structural response is re-simulated using the fitted parameters • Accurate re-simulation validates method and shows fitted parameters are realistic 14 Conclusions • The algorithm is able to accurately identify stiffness and permanent displacement in a non-linear steel frame structure and in many simulated structures with significant random noise • The algorithm has also been applied to recognize different regimes of motion of a hybrid rocking structure • Relatively minimal computations are required making the method very suitable for real-time implementation – Could be run on 10-20 MIPS – i.e. your fancy cell phone does more work