Nonlinear Programming Approach to Filter Tuning
advertisement

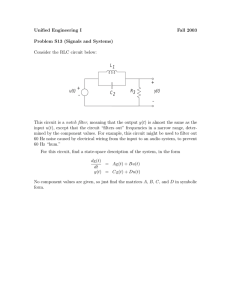
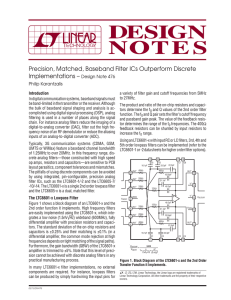
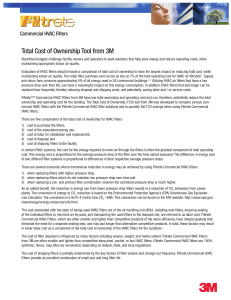
NonlinearProgrammingApproachtoFilter Tuning DylanM.Asmar andGreg J.Eslinger May 15,2012 1 Introduction State estimation is a problem that is often encountered across multiple disciplines. Filters are used to obtain state estimations based on measurements whenoneorbothofthedynamicsandmeasurementsareinaccurateorsubject tonoise. Various filtermethodscanbeapplied toobtain accuratestateestimations. SuchfiltersincludetheKalmanfilter[1],particlefilter,[2],unscented KalmanfilterandextendedKalmanfilter[3],andaconstantratefilterbased ontheFokker-Planckequation[4]justtonameafew. However,despitealarge varietyinfilters,mostrequiretuningafterimplementation. Filter tuning is the process of selecting measurement and dynamic noise statisticstoobtainadesiredperformance. EvenoptimalfiltersliketheKalman filter are sensitive to tuning parameters [5]. Often, filter tuning is done via trialanderror. Thisprocessmayprovideinsightfortheengineering,butoften consumesalargeamountoftime[6]. Aplethoraofresearchhasbeendevotedtodevelopalgorithmstooptimally and/or automatically tune filters, especially the Kalman filter. These methods include a neural network based approach [7], using the downhill simplex algorithm[6],reinforcementlearning[8],andmanymore[9,10]. However,gradientbasedmethodshavelargelybeenavoided. Thedi_cultyofanalytically calculatingthegradient,approximatingthecostfunctionwithawell-behaved function,andtheinstabilityofnumericaldi_erentiationofnoisyfunctionshave allcontributedtothisavoidance[7,6]. Thispaperfocusesonapplyinggradient-basedmethodstotunefilterswhich estimatetheverticalstateofaircraftbasedonlyonquantizedaltitudemeasurements. Di_erentstateestimationtechniqueshavebeendevelopedforquantized measurements; however, only the Kalman filter and a modified Kalman filter [11]willbediscussed. Therestofthispaperisorganizedasfollows. Section2givesanoverviewof theaircrafttrackingproblemandthemodelused. Section3outlinesthegeneral mathematicalprogramdefinitionandthenformulatesaformalrepresentation ofthetrackingproblem. Section4discribesthevariousapproachestogradient 1 basedoptimization. Section5showstheresultsofthedi_erentmethodsaswell asaderivationofanimprovedsearchalgorithm. 2 ProblemOverview Theproblemunderconsiderationisfindingthebestfilterparametersforvertical state estimation of aircraft with quantized altitude measurements. Tracking suchaircraftisanapplicablereal-worldproblem. TheTra_cAlertandCollision AvoidanceSystem(TCAS)ismandatedonalllargeaircraftworldwide. TCAS servesasalastminutedefenseagainstmidaircollisionsandissuescommandsto changealtitudewhenneededintheformofresolutionadvisories. Themajority oftheadvisoriesinthecurrentU.S.airspacearewithintrudersthatbroadcast theiraltitudewith100ftquantization. Lastminutecollisionavoidancesystems relyonprecisealtituderateestimationsandaccuratelyestimatingthevertical ratefromsuchquantizedmeasurementsisdi_cult[12]. 2.1 Model Anaircraft’sverticalstateisdefinedintermsofaltitude, h˙ . Thisisformallydefinedas _hk _ xk = ˙ hk h,andverticalrate, A) Thestateestimationisperformedbasedonobservationsof zk =Δround _1 0_x k + wk0 ! Δ where k isadiscrete-timeindex,_isthesizeofthequantizationlevel,and iszero-meanGaussianmeasurementnoisewithcovariance R 0. Theaircraftverticalmotioncanbemodeledwithadiscrete-timelineardynamicsystemas: x k +1 = Fx k + Gvk where x k isthestatevectorpreviouslydefined, noisewithcovariance Q,and B) wk0 C) vk iszero-meanGaussianprocess _1 dt _ 0 1 _dt/2 2_ G= dt F = D) E) where dt isthechangeintimefrom k s 1 to k . Inthisformulation,thetracked aircraftisassumedtomaintainconstantvelocityandmaneuversaremodeled asaccelerationsduetoprocessnoise. Themeasurements zk aremodeledby zk = Hx k + wk 2 F) where wk iszero-meanGaussianobservationnoisewithcovariance R ,and H = _1 0_ 2.2 G) Filtering ModelingtheverticaltrackingproblemintheformatdescribedinSection2.1, allowsfordi_erentfilterstobeapplied. AKalmanfilterandamodifiedKalman filter[11]werechosen. TheKalmanfilteristhebestlinearestimatorandthe modifiedKalmanfilterprovidesasimilarnonlinearcounterparttoanalyze. The detailsofthefilteringalgorithms arebeyondthescopeofthispaper, butare providedinAppendixAforreference. 3 ProgramFormulation Thedesiredperformanceofafilterdictateshowtheparametersshouldbeselected. AsdescribedinSection2,theverticalestimationproblemiscrucialto last minute air tra_c collision avoidance systems since they rely on accurate verticalrateestimates. Thisnaturallyleadstoadesiretominimizetheerrorin theestimatedverticalrate. Theidealsituationwouldallowfortheminimizationoftheerrorduringestimationprocess. However,thereisnoaccesstothe truedataduringestimation. Therefore,theparametershavetotunedapriori. Stateestimationproblemsoftenhavehistoricaldataonthesystemforwhich the filters were designed. Usingthis assumption ofattainable data, the filter canbetunedo_inetooptimizeperformanceoverasubsetofdatathatisagood representationoftheactualsystem. Applyingthisideainageneralsense,the costfunctioncanbedefinedintermsoftherootmeansquarederror(RMSE) as: n s X X cj RMSEij J ( p,p, 1 2 ∙∙∙ ,p l ) = H) i =1 j =1 where J isthecostafunctionof l parameters, p, cj istheweightoftheRMSE i j of item i of the subset, n is the of state j , RMSE jis the RMSE of state numberofitemsinthesubset,and s isthenumberofstatevariables. Forthe KalmanfilterandmodifiedKalmanfilter,theonlychangeinresultswouldbe subjecttotheprocessnoisecovariance, Q,andtheobservationnoisecovariance, R . Thereforetheformaldefinitionofourprobleminthegeneralsensewould be: n s min J ( Q,R ) = X X cj RMSEij Q,R i =1 j =1 s.t. Q,R _ 0 Therefore,theprogramformulationfortheverticaltrackingproblembecomes: n min J ( Q,R ) = X Ych j Q,R i =1 3 i RMSE + ch˙ h˙ iRMSE _ Figure1: ContourPlotofanExampleDataSet s.t. Q,R ≥ 0 isthealtitude RMSEfor track ch˙ arepredefined weights, i , h˙ iRMSE is i ,and n isthenumberoftracksinthesetfor theverticalrateRMSEfortrack whichtheoptimizationisoccurring. Theparticularproblemposedisadvantageousfromanintuitivedesignperspectiveinthatanyoptimizationwilloccurbychangingtwoscalarvalues. This allowscontourandmeshplotstobeusedtoaidtheKalmanfilterandmodifiedKalmanfiltertuning. Inalternativeproblemswithhigherdimensionsthis wouldnotbepossible;however,thisproblemwillallowforademonstrationof theperformanceofthesearchalgorithmsthroughtheaidofplots. Fig.1shows anexampleofwhatacontourplotmightlooklikeforthisproblem,whileFig.2 isathreedimensionalmeshofthesameexamplecase. Noticeinthecontourandmeshplotthattheredidnotappeartobeaunique globalminimum;rather,thereexistedatroughofQandRvaluesthatproduced similarcostsforallQandRinthetrough. Uponcloserinspectionthetrough didcontainaglobaloptima. hiRMSE 4 Methods This section discusses various gradient-based methods used to solve unconstrainednonlinearoptimizationproblems. 4.1 GradientDerivation Sincethecostfunctionwasnotexplicit,thereweretwoapproachesconsidered fordeterminingthegradient: adjointmethodsandfinitedi_erenceequations. 4 Figure2: 3DimensionalMeshofanExampleDataSet 4.1.1 AdjointMethods Adjoint methods find the derivative of a function imbeded in a program by trackingthederivitivesofallvariablesintheprogram. Themethodisbasedon thefactthatallprogramsarecomprisedofasetofequations. Therefore,any programcanbewrittenas y = F n ( F n k 1 ( ...F 2 ( F 1 ( x )) ...)) I) where Fi ( • ) is the i th line of code in the program [13]. Using this logic, the derivitiveof y withrespectto x isfoundusingthechainrule: ∂y ∂F n ∂F n k 1 ∂F 2 ∂F 1 ... = ∂x ∂z n k 1 ∂z n k 2 ∂z 1 ∂x _) where zi isthevectorofallinternalvariablesatline i ofthecode. Theadjoint canbecalculatedintheforwardorbackwarddirection;however,if n =dim( x ) and m =dim( z), calculatingtheadjointintheforwarddirectionrequirestrackingan m × n matrixwhilecalculatingtheadjointinthereversedirectionrequires trackinga1 × m matrix. Adjoint methods will produce the analytic gradient of the function with respecttotheinputvariables; however,adjointmethodsrequirethreetofour linesofcodeforeveryoriginallineofcodeexecutedintheforwarddirection. Adjoint methods also require every value for every variable be saved for the reversedirection,whichcanfillupcomputermemoryquickly. 5 4.1.2 Finite-Di_erenceEquations Finite-di_erence equationsapproximatethederivativeofthefunctionbyperturbingthefunctionbyasmallamountandtrackingthechangeintheobjective function. Assumingthefunctionisdi_erentiable,thegradientisapproximated byfindingtheslopeofthelinearizationattheperturbationpointusingtheperturbation data. Because the finite-di_erence equations only approximate the gradient,thegradientproducedbythefinite-di_erenceequationswillnotbeas accurateasthoseproducedbyadjointmethods. However, thecomputational overheadoftheerrorcalculationwasverysmallascomparedtothefulladjoint method. Forthisreasonfinite-di_erenceequationswerechosentoapproximate thegradient. 4.2 Algorithms SincetheHessianoftheobjectivefunctionisnotaccessable,theavailableoptimizationalgorithmsare: • SteepestDescent • Quasi-NewtonMethods • FirstOrderMethods ThesealgorithmswillbediscussedindetailinSection4.2.1,Section4.2.2,and Section4.2.3,respectivly. 4.2.1 SteepestDescentMethods TheSteepestDescentAlgorithm,aspresentedbyProfRobertFreund,isseen inAlgorithm1: Algorithm1 SteepestDescent Given x 0 0 k repeat dk := sr f ( x k ) α =argmin α f ( x k + αdk ) x k +1 x k + αdk k k+ 1 until dk =0 Thesteepestdescentmethodhastheadvantageofbeingoneofthesimplist optimizationmethods. Itisalsorequireslittleoverhead,astheonlyinformation x k . However,thesteepest thatissavedfromaninterationisthecurrentvalueof descentmethoddoesusealinesearch, whichcanbecostlydependingonthe function. Thesteepestdescentmethodcanalsobreakdownwhentheprobrlem isill-conditioned,thatis,whenthesearchpathfallsintoavalleythatissteep inonedirectionbutshallowinanother. 6 4.2.2 Quasi-NewtonMethods Quasi-NewtonMethodsattempttobuildupanestimateoftheHessianasthe searchprogressesbyusinginformationonthefunctionvalueandthegradient. TheearliestQuasi-NewtonMethodistheDavidon,Fletcher,Powell,orDFP, method. ThemostpopularmethodnowadaysistheBroyden,Fletcher,Goldfarb, Shanno, orBFGS,method[13]. TheBFGSAlgorithm, aspresentedby ProfStevenHall,isseeninAlgorithm2: Algorithm2 Quasi-Newton(BFGS) 0 Given x B 0 := I 0 k repeat dk := s B k r f ( x k ) α =argmin α f ( x k + αdk ) x k +1 x k + αdk sk = αd k = x k +1 s x k yk = r f ( x k +1 ) s f ( x k ) T _ I s yskT Tk _ B k _ I s B k +1 ys k k ysk y kTs T k k _+ ssk y kTs T k k k k+ 1 until dk =0 TheadvantageofQuasi-Newtonmethodsisthattheydonotstrugglewith ill-conditionedproblemsasmuchassteepestdescentmethodsdo. Thedownsideisthatadditionalcalculationsarerequiredateachiteration. Inaddition, B k +1 ,mustbestoredateveryiteration. additionalinformation,intheformof 4.2.3 FirstOrderMethods TheSimpleGradientSchemeoftheFirstOrderMethod,aspresentedbyProf RobertFreund,isseeninAlgorithm3: Algorithm3 FirstOrder Given x 0 , L k 0 repeat dk := sr f ( x k ) 1 x k +1 x k s←r f (x k ) L k k+ 1 until dk =0 This method is very similar to the steepest descent method in that the descentdirectionissimplythenegativeofthegradientofthefunctionevaluated 7 at x k . However,oneofthemajorassumptionsofthefirstordermethodisthat f ( • ) hasa Lipschitz gradient. Thatis,thereisascaler L forwhich kr f ( y) sr f ( x ) k≤ L ky s x k8 x,y 2 Rn ) L willbeinitializedat L =1. At Since L isunknownforthisapplication, everyiteration,ifEq.)holds,thenthecurrentvalueof L issu_centforthe searchalgorithmtoconverge. f ( y) ≤ f ( x ) + r f ( x ) T ( y s x ) + L ky s x k2 2 ) Should the current iteration fail this test, the algorithm is set to double the currentguessof L andrecomputethestep. Therefore,thetruealgorithmthat willbeimplimentedforthisprojectisseeninAlgorithm4 Algorithm4 FirstOrder(Modified) Given x 0 L = L0 . Theusermustprovideaguessfor k 0 repeat dk := sr f ( x k ) 1 x k +1 x k s←r f (x k ) L k +1 k if f ( x ) >f ( x ) + r f ( x kT) ( x k +1 s x k +1 ) + L2 ky s x k2 then L =2 L x k +1 xk . Thisrerunstheiterationwiththenewvaluefor endif k k+ 1 until dk =0 5 Results ThissectiondiscussestheresultsofeachalgorithmdiscussedinSection4. Multipledatasetswereusedtosimulatevarioustruedatasets. 5.1 DataSetGeneration/Evaluation Threetypesofdatasetswereusedwhentestingthealgorithms. • Synthetictracksfromanassumedmodel • Synthetictracksgeneratedformahighfidelityencountermodel • Actualradardataofaircraftcollisionavoidanceadvisoryevents 8 L0 L Figure3: ConvergencePathsofDi_erentSearchAlgorithms Thefirstsetofdatawasusedasastartingpointandacontrol. Trackswere generatedfromthedynamicmodelgivenbyEqs.B)toE). Thealtitudewas quantizedat100ftlevelsaftertheobservationnoisewasaddedtogeneratedthe measurements. The process and observation noise covariances were varied to generatevariousdatasets. Thestartingaltitudewassampledfromanormal distributionwithameanof15000ftandastandarddeviationof5000ft. The initialaltituderatewassamplefromanormaldistributionwithameanof0ft/s andastandarddeviationof50ft/s. Thesecondtypeofdatasetweregeneratedfromahighfidelityencounter model[14]. Thetracksaregeneratedfromacorrelatedmodelbasedonrecorded advisoryeventsintheU.S.airspace. Thethirdtypeofdatasetwasactualradar dataofencounterswithaircraftof100ftquantizationlevels. Each scenario resulted in the convergence of at least one algorithm to an optimum. Theparametersettingsfoundusingsubsetsoftruedata(theradar data) were applied to the larger set. In each case, the mean RMSE over all tracks was lower than multiple other settings tested. Including settings from anexperiencedengineeringthathadbeenworkingwiththeKalmanfilterand modifiedKalmanfilterforthisproblem. 5.2 AlgorithmPerformance Thethreedescribedalgorithmswererunonaseveraldi_erentsetsofdata. The results forallthree methodsfrom aradar datasetareshowninFig. 3. The purposeofthissectionisnottopresenttheresultofonedataset;rather,itis tocompareandcontrasttheperformanceofthedi_erentsearchalgorithmson thisparticulartypeofoptimization. 9 Figure4: LinearConvergenceofSteepestDescentAlgorithm 5.3 SteepestDescentAnalysis Thesteepestdescentalgorithmwasabletoconvergeinaregionthate_ectively minimizedtheobjectivefunction. Fig.3alsoshowsthathem-stitchingoccured during the search. The steepest descent mehtod also converged linearly. An algorithmissaidtoconvergelinearlyifthereisaconstant δ< 1 suchthatfor all k su_centlylarge,theiterates x k satisfy: f ( x k +1 ) s f ( x _ ) ≤ δ f (xk ) s f (x _ ) _) where x _ issomeoptimalvalueoftheproblem[15]. Theplotof δ ateachiteration canbeseeninFig.4. Inthisparticularexamplethealgorithmdidnotrunfor enoughinterationstomakeadefinitvestatementonwhethertheconvergence waslinear. ThereappearstobealinearsectionbetweenIteration2and8as wellasasuperlinear section between Iteration 8and 12; however, this isnot enoughiterationstoclearlyproveordisprovelinearconvergence. r g( x k +1 ) •r g( x k ) 6 Itisalsointerestingtonotethat =0. Whenanexactline searchisusedand theexact gradientisprovided, everyiteration travelsperpediculartothepreviousiteration. Sincethegradientofthefunctionwasonlya numericalapproximationandthelinesearchusedwasnotanexactlinesearch, thestepsinthesteepestdescentalgoirthmwerenotperfectlyperpedicular. 10 5.4 Quasi-NewtonMethods TheQuasi-NewtonMethodconvergedinthefewestiterationsascomparedtothe othertwomethods. Theteamalsocheckedtoseeifthisalgorithmdemonstrated quadraticconvergence. Analgorithmissaidtoconvergequadtraticallyifthere existssome δ< ∞ where: lim k →∞ f ( x k +1 ) s f ( x _ ) ≤ δ 2 ( f ( x k ) s f ( x _ )) _) Although Newton and Quasi-Newton methods often times converge quadratically, this algorithm did not. This is partially because the Hessian was approximatedusingnumericalapproximationsofthegradients. Thisintroduces errorintotheHessian,whichwasalreadyanapproximation. Nevertheless,itis significanttonoticethattheBFGSconvergedquicklyonasolution. 5.5 FirstOrderMethods Outofallthreealgorithms,theFirstOrderMethodconvergedonthegreatest function value. Fig. 3clearly shows that the First Order Method could have continued to decrease the function value. The algorithm’s termination was caused by the decreasing gradient. Since L is fixed, as the magnitude of the gradientdecreases,sodoesthestepsize. Asthestepsizesdecrease,thechanges betweenfunctionvaluesdecrease. Eventually,thechangesinthefunctionvalue become so small the algorithm deems the path converged. Steepest Descent Methodsdonothavethisissuebecausethestepsizeisvariable. On the other hand, the First Order Method is the most stable method. TheFirstOrderMethodhasguaranteedconvergeceinaconvexregion. This isevidincedbythefactthattheconvergencepathoftheFirstOrderMethod washeading directly towards the minimum. SteepestDescent algorithms, althoughtypicallyrobust,cannotfullyboastguaranteedconvergencewhenusing anin-exactlinesearch. SinceNewtonandQuasi-Newtonmethodsalsouseline searches,thesamecanbesaidaboutthesemethods. Althoughtherearetoofewdatapointstomakeadefinitiveasserstion,Fig.5 suggeststhattheFirstOrderalgorithmhasanearlinearconvergence. Itisalso interestingthattheFirstOrderpathseemedtofindandfollowaneigenvector ofthesystem. Thisissignificantbecauselinesearchalgorithmsperformvery well when aligned with the eigenvector. This lead to the development of the AugmentedFirstOrderMethod 5.6 AugmentedFirstOrderMethod In order to create a more e_cent algorithm for solving the posed problem, a hybrid algorithm was developed that combined First Order Methods with SteepestDescentMethods. SincetheFirstOrderMethodwase_ectiveatfinding aneigenvector,thealgorithmstartsthesamewayastheFirstOrderMethod. WhentheFirstOrderMethodhasconvergedonatrough,thealgorithmswitchs 11 Figure5: LinearConvergenceofFirstOrderMethod toalinesearch,whichrapidlyfollowsthetroughdowntowardstheminimum. Theswtichingcriteriaforthealgorithmwasderivedfromthedotproduct: u• v cosθ = kukkvk ) Thedotproductisusedinthealgorithmtomeasuretheanglebetweenthelast stepandthecurrentdescentdirection. WhenEq._)holdstrue,thedescent directionise_ectivelylinedupwiththepreviousdirectionoftravel,indicating alinesearchwouldbeappropriate: k k dk • ( x k s x k 1 ) >c kdk kkx k s x k 1 k _) where 0 <c< 1. The value of c determines the range of θ that allows the algorithmtousealinesearchinsteadoftheFirstOrderMethod. Inpractice, c =0 .97 producedsatisfactoryresults. Thisvalueof c makestheallowableangle deviationapproximitely15degrees. AcomparisonoftheAugmentedFirstOrder Algorithm, the Steepest Descent Algorithm, and the First Order Method are seeninFig.6. Aftermultipletests,theAugmentedFirstOrderMethodtypically convergedonasolutionin30%lessiterationsthanthesteepestdescentorfirst ordermethod. TheaglorithmcanbeseeninAlgorithm5. 6 Remarks • Thecasesanalyzedinthispaperweresimplecasesofamuchmoregeneral problem set. However, the results suggest that gradient-based methods 12 Figure6: ComparisonoftheDi_erentSearchAlgorithms Algorithm5 AugmentedFirstOrderMethod Given x 0 L = L0 . Theusermustprovideaguessfor L0 k 0 repeat dk := sr f ( x k ) if dk • ( x k s x k k 1 ) >c kdk kkx k s x k k 1 k then . 0 <c< 1 α =argmin α f ( x k + αd k ) x k +1 x k + αd k else 1 x k +1 x k s←r f (xk ) L k +1 k if f ( x ) >f ( x ) + r f ( x kT) ( x k +1 s x k +1 ) + L2 ky s x k2 then L =2 L x k +1 xk . Thisrerunstheiterationwiththenewvaluefor L endif endif k k+ 1 until dk =0 13 shouldbeconsideredwhenforoptimalfiltertuning. • Thecostfunctionconsideredisnotvalidforalltuningsituations. Certain situationsmightrequirethefiltertobemorerobusttoverynoisyobservations. Therefore, minimizing over the RMSE would not be the ideal case. • When optimizing over a data set, generally a bound on the converged covariancefromtheKalmanfilterwouldbeset. Thiswouldprovideadditionalconstraintstoconsider. • TheanalysisinthispaperinvolvedtherapidsimulationofaKalmanfilter andamodifiedKalmanfilterovernumeroustracksatvariouslengths. For slowerfilters(i.e. theparticlefilter)orforextremelylargedatasets,this processwouldnotbetractable. • Despitemultipleevaluationsofthefiltersperalgorithm,theoptimization methodwasmuchfasterthanagriddingscheme. 7 Conclusion It is important to note that the goal of this publication was not to tune a specificKalmanfilterormodifiedKalmanfilter. Instead,theobjectivewasto proveitispossibletousegradientmethodsonafunctionthatisnotnecessary convex in order to optimize a given filter. The steepest descent method, the BFGSalgorithm,andthefirstordermethodswereallabletofindanoptimum ofthegivenfunction. Throughaconvexcombination ofthesteepestdescent algorithmandfirstorderalgorithm,itwasevenpossibletodecreasethenumber ofiterationsrequiredtooptimizethefilter,whichbecomessignificantifcalling the function to return a value is time consuming. The application used in thispublicationwasparticularlyuniqueinthatthesearchspacewasonlytwo dimensional. Thisallowedtheplottingofthesearchspacetoensurethesearch space had the proper curvature to allow optimization. In higher dimensions itwouldnotbepossibletographtheprobleminthismanner, meaningthere is no guaruntee algorithm convergence or global minima. Nevertheless, this publication provides the proof of cocept for gradient-based optimization of a filter. Appendices A Filters ThissectionoutlinestheKalmanfilterandthemodifiedKalmanfilterandhow theyareappliedtotheproblemdefinedinSection2. 14 A.1 KalmanFilter IfthestatedynamicsandmeasurementsareproperlymodeledbyEqs.C)toG), thenaKalmanfilterprovidesanexactsolutionforestimatingtheposteriorstate distribution[16]. Theupdatedstateestimatewouldbeadistributionwithmean andcovariance: xˆ k = F xˆ k k 1 + K k ( zk s HF xˆ k k 1 ) Pˆ k =( I s KH )( FPˆ k k 1 F T + Q) k _) “) where K k istheKalmangaingivenby K k =( FPˆ k k 1 F T + Q) H TS k1 k ”) and Sk istheinnovationcovariancegivenby Sk = H ( FPˆ k k 1 F T + Q) H T + R “) Theinitialmeanandcovariance,^ x 0 and Pˆ 0 ,canbecalculatedbasedonthefirst measurementorsetapriori. Without quantization, the observation noise covariance would be set to a valuebasedonknowledgeoferrorinaircrafttransponders;however,sincethe observationsarequantized, thecovarianceneedstobehandleddi_erently. A common approach to handling measurement quantization is to use the Sheppardcorrection[3]. Thisapproachtreatsthemeasurementsasbeinguniformly distributedovertheinterval( s Δ / 2, Δ / 2),whichresultsin R =Δ 2 / 12. A.2 KalmanFilterModifiedforQuantizedMeasurements Curryetal. presentanapproachforquantizedmeasurements[11]. Insteadof computingE[ x |z]usingEq._)liketheKF,theycompute E[x |z 2 A ]=E[E[ x |z]|z 2 A ] ”) where A representsaquantizationinterval. Themeanandcovariancearegiven by E[x k |zk 2 A k ]=ˉ x k + K k (E[ zk |zk 2 A k ] s H xˉ k ) cov[x k |zk 2 A k ]= Pˆ k + K k cov[zk |zk 2 A k ]K kT _) _) where x_k = F xˆ k k 1 . Equation _) is equivalent to Eq. _) and Eq. _) is equivalenttoEq.“)ifthemeasurementsarenotquantized. Eq._)shows that the quantization is treated as if it were uncertainty added after a linear measurementhadbeenprocessed. Theuncertaintyinducedbythequantization isaddedto Pˆ k ,whichistheminimumcovarianceifthemeasurementsarenot quantized. Duan,Jilkov,andLipresentane_cientmethodofnumericallycalculating E[z|z 2 A ]andcov[ z|z 2 A ][17]. Theirapproachusesagridtoapproximatethe 15 P ( H x k | z 0: k ) A zk H xˉ k Hx k Figure7: IllustrationofthenumericalprocessusedtocalculateE[ z|z 2 A ]. H k xˉk , as adiscrete probabilitydensityfunction of thepredicted observation, probabilitymass function. In the problem of vertical state estimation, z is a scalar. Applyingthistechniquetothisproblem,theequationsbecome L E[zk |zk 2 A k ] ≈ X pg i i _) i =1 L 2 2 cov[zk |zk 2 A k ] ≈ X pg i i s (E[ zk |zk 2 A k ]) –) i =1 where pi istheprobability associated with the gridpoint gi usedinapproximatingthedensityfunctionasthemassfunction,and L isthenumberofgrid points. AnillustrationoftheprocessisshowninFig.7. Theinitialdistribution isGaussianwithmean H xˉ k andcovariance Sk . Thedensityfunctionisthen L discrete probabilities are caltruncated by the quantization bin. A set of culated,transformingtheprobabilitydensityfunctionintoaprobabilitymass function. References [1] R. E. Kalman, “A new approach to linear filtering and prediction problems,” TransactionsoftheASME.SeriesD,JournalofBasicEngineering vol.82D,pp.35e,1960. [2] M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian track16 , ing,” IEEE Trans. Signal Processing , vol. 50, no. 2, pp. 174ˆ, 2002. doi:10.1109/78.978374. [3] T.Soderstrom, Discrete-time Stochastic Systems . Springer-Verlag,2002. [4] E. Sviestins and T. Wigren, “Nonlinear techniques for Mode C climb/descentrateestimationinATCsystems,” IEEE Trans. Contr. Syst. Technol.,vol.9,no.1,pp.163|,2001.doi:10.1109/87.896757. [5] A.Gelb, Applied Optimal Estimation . MITPress,1974. [6] T.D.Powell, “Automatedtuningofanextendedkalmanfilterusingthe downhillsimplexalgorithm,” JournalofGuidance,Control,andDynamics vol.25,no.5,pp.901H,September-October2002. , [7] O.V.Korniyenko,M.S.Sharawi,andD.N.Aloi,“Neuralnetworkbased approachfortuningkalmanfilter,”vol.25,no.5,2005,pp.1-. [8] C.GoodallandN.El-Sheimy,“Intellegienttuningofakalmanfilterusing low-costmemsinertialsensors.” [9] B.M.Akesson,J.B.Jorgensen,N.K.Poulsen, andS.B.Jorgensen, “A toolforkalmanfiltertuning,”in 17th European Symposium on Computer Aided Process Engineering - ESCAPE17,2007. [10] M.Saha,B.Goswami,andR.Ghosh, TwoNovelCostsforDeterminingthe Tuning Parameters of the Kalman Filter ,DepartmentofInstrumentation andElectronicsEngineeringStd. [11] R.E.Curry,W.E.V.Velde,andJ.E.Potter,“Nonlinearestimationwith quantizedmeasurements-PCM,predictivequantization,anddatacompression,” IEEE Transactions on Information Theory ,vol.16B),pp.152q, 1970. [12] J.W.Andrews,“Animprovedtechniqueforaltitudetrackingofaircraft,” MassachusettsInstituteofTechnology,LincolnLaboratory,ProjectReport ATC-105,Mar.1981. [13] S.R.Hall,“Principlesofoptimalcontrol,”Slides,February2012. [14] M.J.Kochenderfer,M.W.M.Edwards,L.P.Espindle,J.K.Kuchar,and J. D. Gri_th, “Airspace encounter models for estimating collision risk,” Journal of Guidance, Control, and Dynamics ,vol.33,no.2,2010. [15] R.M.Freund,“Thesteepestdescentalgorithmforunconstrainedoptimizationandabisectionline-searchmethod,”February2012. [16] G.M.Siouris, AnEngineeringApproachtoOptimalControlandEstimation Theory. JohnWiley&Sons,Inc.,1996. 17 [17] Z.Duan,V.P.Jilkov,andX.R.Li,“Stateestimationwithquantizedmeasurements: ApproximateMMSEapproach,”in Proc. 11th Int Information Fusion Conf,2008,pp.1®. 18