ME 481 - H06 Name ________________________
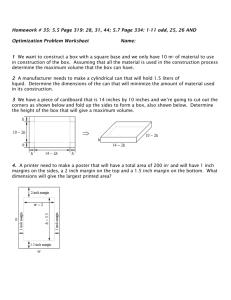
Use generalized coordinates {q} and joint constraints {
} for the slider crank shown below.
x y
x
2
2
2
3
y
x y
3
3
4
4
4
2
r
3
2
r
4
3
4
r
4
2
3
C r
3
1
2
A
B
C
2
y
4
4
2 t
y
2
A
2
A x
2
A
1
2 y
1
B
2 x
1
B
B
3
G
3 y
3
G
3 x
3
3 C
C
3
C
4
4 y
4 x
4
AB = R = 0.985 inch
BC = L = 4.33 inch
BG
3
= 1.1 inch
G
2
is at A
2
(balanced crank)
G
3
is on centerline of link 3
G
4
is at C
4
(simple piston model) x
2
axis along centerline of link 2 x
3
axis along centerline of link 3
2
= 1000 rpm CCW constant
2
4
A
0
0
C
0
0
'
2
1
A
B
0
0
R
0
BLUEPRINT INFORMATION
'
3
B
BG
3
0
3
'
C
L BG
3
0 example for B3
3 3
3 3
'
B
3
cos sin
3
3
sin
3 cos
3
ME 481 - H06 Name ________________________
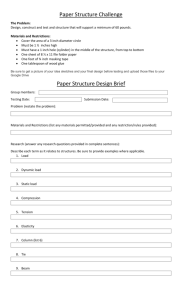
1) Evaluate residuals {
} for rough estimates of generalized coordinates {q} at t = 0.005 sec shown below. Comment on the relative precision of {
} versus {q}.
0
0
0 .
4363
2 .
0 inch inch rad inch
( 25
)
__________ _____
__________ _____
__________ _____
__________ _____
0 .
5
0 .
1745
0
5 .
0
0 rad inch rad inch inch
( 0
(
10
)
)
__________ _____
__________ _____
__________ _____
__________ _____
__________ _____
2) Use geometric equations to determine better estimates for {q} at time t = 0.005 sec. Then evaluate new residuals. Comment on precision of {q} and {
} between parts 1) and 2).
0
0 inch inch
2 t
__________
__________ _____
__________ _____
__________ _____
__________ _____
__________ _____
__________ _____
__________ _____
__________ _____
0
0 inch rad ( 0
)
__________ _____
__________ _____
__________ _____
__________ _____
__________ _____
3) Evaluate the Jacobian
q
for your better estimate of {q} at t = 0.005 sec.
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
______
ME 481 - H06 Name ________________________
4) Use your code to perform a Newton-Raphson position solution at t = 0.010 sec. Calculate piston position x
4
and determinant of the Jacobian. Validate with geometric equations. x
4
(Newton-Raphson) ____________ det
q
____________ x
4
(geometric) ____________
5) Compute piston velocity x
4
and acceleration right-hand-side (RHS) vectors
and
x
4
at t = 0.010 sec using a matrix solution with
. Validate with geometric equations. x
4
(matrix) ____________
x
4
(matrix) ____________ x
4
(geometric) ____________ x
4
(geometric) ____________
EXTRA CREDIT
Place a loop around your solution for part 5) using 0 ≤ t ≤ 0.06 sec and provide MATLAB graphs for piston position x
4
and acceleration x
4
as functions of crank angle
2
. Validate using results from geometric equations on the same MATLAB graphs.
EXTRA EXTRA CREDIT
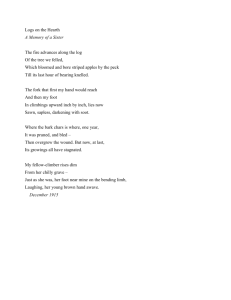
Modify your slider crank code for part 5) to analyze the four bar in Notes_04_05. This should only require modifying the last three rows in your constraint vector, your Jacobian matrix and your acceleration RHS vector. use
2
= 65° validation
= 13.151°
3
2
3
= 10 rad/sec CW
= _______________
3
2
= 2 rad/sec
2
CCW
= +7.0627 rad/sec
2
4
= -65.173°
4
= -5.3533 rad/sec
4
= _______________