DynamicPlanet2005 Tajul SL edit
advertisement

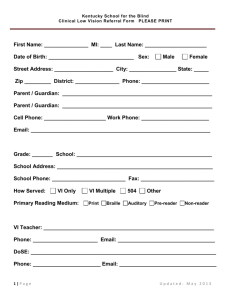
Dynamic Planet 2005 August 22-26 2005, Cairns Australia Modelling of Dispersive and Non-dispersive Effects on Network-Based Positioning Tajul A. Musa, Samsung Lim, and Chris Rizos School of Surveying and Spatial Information Systems UNSW, Sydney, NSW 2052, Australia Tajul.Musa@student.unsw.edu.au Overview: Single-Based vs Network-Based RTK Single-based RTK positioning: in demand for a longer inter-receiver distance, and yet for the same performance as with a short baseline Key issue: ability to resolve long-range carrier phase ambiguity in (near) real-time Problem: long-range ambiguity resolution is complicated due to the presence of distant-dependent errors i.e; ionosphere effect and troposphere delay (and orbit error) Test Area 2 : SIMRSN, SINGAPORE (low latitude) Test Area 1 : SYDNET, AUSTRALIA (mid-latitude) South East Asia SEMB CWAN SINGAPORE LOYA SPWD + - NTU0 Ionospheric Effect + Can be effectively cancelled over a short baseline 1-50ppm depending on solar activity and geomagnetic location Can be eliminated by a double frequency receiver (Iono-free combination) Tropospheric Delay Apply a priori or physical models (Saastamoinen, Hopfield, etc) Can model the dry component effectively but not the wet comp. 1-3ppm depending on geographic location and satellites’ elevation Common approach : estimation of troposphere scale factor, or stochastic estimation (not suitable for RTK mode). Orbit Error Broadcast ephemeris – accuracy < 200cm, real-time IGS Ultra Rapid Orbit – accuracy < 10cm, real-time Not critical to the baseline computation VILL UNSW KEPC WFAL Ref. Stn Master-to-Reference Process Network ambiguity Network residuals Generating Network Correction Residual interpolation (2D,3D) Correction separation User Stn Centre User Process Improv. measurements Improv. ambiguity estimation Improv. position accuracy Network Approach Lat : 1 15’ - 1 30’ N Long: 103 40’ - 10359 E Lat : 33 36’ - 34 08’ S Long: 150 34’ - 15112’ E Instantaneous Ambiguity Resolution & Validation SYDNET (SPWD-VILL) Cut-off Case Elev. Init. Approach: use a local GPS network to better estimate and model distance-dependent errors Master Stn NYPC Single-Based Network-Based SYDNET (F-Ratio) 10 Correct Reject Wrong Correct Reject Wrong % % % % % % 10 4103 84.5 5.8 9.7 91.5 3.0 5.6 15 3916 87.8 2.9 9.3 94.6 1.4 4.0 20 3345 93.6 0.5 5.9 98.1 0.4 1.5 15 20 SIMRSN (LOYA-NYPC) Cutoff Elev. Case Init. Single-Based Network-Based SIMRSN (F-Ratio) 10 Correct Reject Wrong Correct Reject Wrong % % % % % % 15 10 4665 96.4 2.1 1.5 98.7 0.8 0.5 15 3584 97.4 2.4 0.2 99.3 0.7 0 20 3033 98.5 1.4 0.2 99.6 0.4 0 20 Why separate the network correction? Net. User Position Accuracy Dispersive term has high variation of ionosphere effect Non-Dispersive term has small/slow variation of troposphere effect (and orbit error) Stn. NYPC Stn. VILL 0.15 0.05 0.1 0 Advantages • Advanced network error modeling • Users are in control of correction application • Extra processing strategy for users Network Correction Generation • Geometry-Free (GF) combination for dispersive term • Ionosphere-Free (IF) combination for non-dispersive term • Frequent update of dispersive-term modelling • Less frequent modelling for non-dispersive term – smoothing technique can be applied Network User Processing (strategy) • Improved IF with non-dispersive correction is useful for narrowlane ambiguity resolution • Combined dispersive and non-dispersive correction improves a user’s position computation -0.05 dUp dUp 0.05 -0.1 0 -0.05 -0.15 -0.1 -0.2 0.1 -0.15 0.05 0.05 dN Corr 0 0 -0.1 -0.05 Mean dN dE Deviation dUp dE dN 0 Corr dE DN dUp w/o -0.015 0.006 with -0.010 -0.002 0.018 0.012 0.027 0.039 0.045 0.010 0.025 0.027 -0.05 -0.05 -0.1 dE Mean DE w/o with 0 DN Deviation dUp dE DN dUp -0.047 0.005 -0.051 0.010 0.010 0.028 -0.050 0.005 -0.034 0.011 0.009 0.023 CONCLUDING REMARKS • Separation of the network correction allows further error modelling and user processing strategy • Proposed strategy performs reasonably well with the two local GPS networks (SYDNET and SIMRSN), and improves ambiguity resolution process and therefore user position computation