Mean-Dispersion Preferences. 16 April 2008
advertisement

16 April 2008
Mean-Dispersion Preferences.
Abstract
The starting point for this paper is the variational preference model introduced by Maccheroni et
al [2006]), which includes Gilboa-Schmeidler multiple-prior preferences and Hansen-Sargent multiplier
preferences.
First, we show that any variational preferences admit a `primal' representation with a natural interpretation: a `mean' expected-utility of the act minus a `dispersion measure' that depends only on
state-by-state di erences from that mean. The second term can be thought of as re ecting the agent's
dislike of dispersion: it is the premium (in terms of the mean utility) that the individual would be willing
to pay to remove all subjective uncertainty associated with the act. The primal representation thus highlights a key behavioral aspect of all variational preferences: the premium does not depend on the average
utility of an act. That is, variational preferences exhibit constant absolute ambiguity aversion.
Second, we develop a generalization of the variational preference model. The generalization is still
based on a mean utility and a dispersion measure that depends only on the state-wise di erences from the
mean. But the new model is only weakly separable in terms of these two summary statistics. Thus, the
ambiguity premium need not be constant in this model. Mean-dispersion preferences can accommodate
many existing models. We show how these correspond to di erent attitudes toward dispersion. Finally,
we use the model to compare di erent notions of aversion to variation across states such as uncertainty
aversion, second-order risk aversion and issue preference.
Keywords: ambiguity aversion, quasi-linearity, weak-separability
Simon Grant
Department of Economics
Rice University
Ben Polak
Department of Economics & School of Management
Yale University
1
Introduction
In a beautiful paper, Maccheroni, Marinacci & Rustichini (2006a) (hereafter MMR) de ne and
axiomatize what they call variational preferences. Consider an Anscombe-Aumann setting with a
nite state space S where each act f maps each state s 2 S to lotteries over outcomes. Variational
preferences are de ned by an expected utility function U over such lotteries and by a convex,
grounded1 ambiguity index c over probabilities on the states such that the preferences over acts
are represented by
V (f ) =
min
P
fp2[0;1]n :
s
ps =1g
X
s2S
ps U (f (s)) + c (p) ,
where n is the number of states and, for state-utility vector u,
of u with respect to probability vector p.
P
s
(1)
ps us denotes the expectation
Variational preferences are a generalization of the well-known multiple-prior model of Gilboa
& Schmeidler (1989) but unlike multiple-prior preferences, general variational preferences can be
smooth. An important smooth example are the preferences considered by Hansen & Sargent
(2001) in their model of robust control.
Maccheroni, Marinacci & Rustichini (2006a) interpret the `dual' representation in expression
(1) as if the agent were playing a game against a malevolent nature who chooses probabilities to
minimize the utility of the agent but who, if she chooses probability p, has to pay back to the agent
the utility c (p). But as we show in section 2 below, variational preferences also admit a `primal'
representation with an equally natural interpretation. For each variational preference de ned by
expression (1), we can nd an expected utility function U over lotteries, a probability weighting
on the states and a convex, non-negative function
respect to
is zero, with
(0) = 0, such that the preferences over acts are represented by
V (f ) =
where
is the `mean' utility given by
:=
from that mean given by ds := U (f (s))
1
over state-utility vectors whose mean with
P
s
(d) ,
sU
.
The function c is `grounded' if inf c (p) = 0.
1
(2)
(f (s)) and d is the vector of utility di erences
We can think of the function
as a index of dispersion. The interpretation is that the agent
with these preferences dislikes dispersion. More speci cally, for each act f , let xf be the constant
act such that xf
f . Then, the dispersion measure
(d) for the act f is given by
U (xf ):
it is the reduction in expected utility the agent would be willing to accept in return for removing
all the state-contingent utility uncertainty associated with the act. Drawing an analogy from
choice under risk, we can think of xf as corresponding to a certainty equivalent and of
corresponding to an absolute risk premium. Thus,
(d) as
(d) is an \absolute ambiguity premium".2
The `primal' representation in expression (2) highlights a key behavioral implication of the
variational preference model (including multiple priors and robust control). The premium that
the agent is willing to pay to eliminate ambiguity does not change in response to changes in the
agent's mean utility. That is: variational preferences exhibit constant absolute ambiguity aversion.
A constant ambiguity premium is a restrictive assumption. How plausible we nd this restriction may depend on the stories we use to interpret these models. For example, one could
interpret a multiple-prior set as simply re ecting the set of probabilities over states of the world
that the agent perceives as possible. There is no reason for this perceived set to change as the
agent becomes better o , and so, in this interpretation, a constant ambiguity premium is perhaps
quite plausible. But an alternative interpretation of variational preferences (even in the multipleprior case3 ) is that they re ect not just the agent's perceptions of ambiguity but also the agent's
dislike of any perceived ambiguity. Indeed, the term `ambiguity averse' seems to suggest dislike
rather than just perception. If we believe this dislike-of-ambiguity interpretation then it seems
less plausible that ambiguity premia should be constant: just as agents with higher mean wealth
tend to care less about a given monetary risk, so agents with higher mean utility might tend to
care less about a given utility uncertainty.
With this in mind, in section 3 of the paper, we develop a generalization of the variational2 This `ambiguity premium' is the amount that the agent is willing to pay to ensure that she obtains the same
utility in every state. This premium corresponds to the the notion of ambiguity aversion in Ghirardato & Marinacci
(2002).
3 For example, in one story used to interpret "-perturbation models, the agent is thought of as perceiving a
large set of possible probabilities (for example, the entire simplex) but then only putting weight " on the `worst
probability' from this set with the remaining (1 ") on a particular prior. In this case, the `revealed-preference'
multiple-prior set is obviously much smaller than the entire simplex. If we believe the story, it is not obvious that
the " (and hence the revealed multiple-prior set) should remain constant as the agent becomes better o .
2
preferences model that allows ambiguity premia to vary as we change mean utility. The new
model maintains, however, the tractable feature that preferences can be expressed in terms of
two summary statistics: a mean utility and a dispersion measure that depends only on state-wise
utility di erences from that mean. More precisely, we consider preferences that are de ned by an
expected utility function U over lotteries, a weighting vector
dispersion function
on the states and a non-negative
over state-utility vectors whose mean with respect to
is zero, with (0) = 0,
and a continuous function ' ( ; ) increasing in the rst argument and decreasing in the second
with ' (y; 0) = y for all y, such that the preferences over acts are represented by
V (f ) = ' ( ; (d)) ,
where
is the `mean' utility given by
from that mean given by ds := U (f (s))
:=
P
s
sU
(3)
(f (s)) and d is the vector of utility `di erences'
. As before, we can think of as a measure of dispersion.
Thus, these preferences are weakly separable in terms of the mean and the dispersion. We call
such preferences \mean-dispersion preferences". The closest analog of this model in the context
of risk preferences is that of Quiggin & Chambers (2004).4
We provide a (partial) axiomatization of the mean-dispersion model. Our axioms generalize
MMR's axiomatization of variational preferences. The most important change is to weaken MMR's
weak certainty independence axiom which in turn was a weakening of Gilboa & Schmeidler's
(1989) axiom which in turn was a weakening of Anscombe-Aumann's (1963) axiom. Thus, there
is a natural nesting of the models in terms of their behavioral assumptions. In addition, since we
are not working with a dual representation, we can relax the need for preferences to be convex or
even state-monotonic.
An example may help
x ideas. Variance is a natural candidate for a dispersion measure.
The standard mean-variance model is linear in the mean and the variance just as in expression
2. Indeed MMR show that the standard mean-variance model is almost an example of variational
preferences. (The `almost' is because mean-variance preferences are not monotonic). Epstein
(1985) introduced a more general mean-variance model precisely to capture the idea of decreasing
4 Quiggin and Chambers also impose a homotheticity property on the dispersion index. Since they are working
under risk, they obviously do not need to infer the weights from behavior.
3
absolute risk aversion. His mean-variance functionals are weakly separable just as in expression
3. Thus, we can think of Epstein's model as an example of our more general mean-dispersion
preferences. (In fact, since we do not require monotonicity, we do not require an \almost".)
We show below that mean dispersion preferences encompass many existing models with each
corresponding to a particular attitude toward means and dispersion captured by particular forms of
the functions ' and . These include Choquet models that have a non-empty core (Chatteaneuf &
Tallon [2002]) and invariant biseparable preference models that are ambiguity averse (Ghirardato,
Maccheroni and Marinacci [2004]). The main class of existing models that cannot (except in special
cases) be viewed as mean-dispersion preferences are those arising from Klibano , Marinacci and
Mukerji's (2005) second-order SEU framework.
In addition to the papers already mentioned, there are two important related recent papers.
Strzalecki (2007) axiomatizes the important special case of variational preferences represented
by Hansen-Sargent multiplier preference model. He shows that these are the only variational
preferences that satisfy the Savage axioms (applied to Anscombe-Aumann acts). An intuition
for this result in the terms of this paper is to recall that variational preferences exhibit constant
absolute ambiguity aversion or CAAA. There is a unique (Savage) subjective expected utility
model that satis es constant risk premia, the CARA model. Translated to ambiguity, this model
is exactly the Hansen-Sargent model.
Siniscalchi (2007) axiomatizes a model (`Vector Expected Utility') that, like ours, evaluates acts
in terms of a baseline mean expected utility and an adjustment term that depends on variability
across states, but he has a di erent construction and interpretation. An attractive feature of
Sinischalchi's approach is a new axiom based on a natural symmetry condition that allows him to
identify a unique baseline prior. Given this, Siniscalchi does not need even our weak uncertainty
aversion condition to identify baseline priors. The VEU preferences exhibit constant absolute
ambiguity aversion (or `a nity'), hence the intersection of our two current models are those meandispersion preferences which exhibit CAAA and for which the dispersion function is symmetric,
that is,
(d)
( d). But as Siniscalchi points out, it would be interesting to combine the two
approaches: that is, add his new axiom to ours, and then use his equal-mean sets (i.e., those
4
de ned by his baseline priors) to restrict independence. We hope this will be future research.
Section 2 discusses the MMR model focussing on the `primal' representation of expression (2),
and on our interpretation in terms of constant absolute ambiguity aversion. We show how constant
absolute ambiguity aversion is related to MMR's key axiom, weak certainty independence, thus
suggesting an alternate axiomatization of variational preferences.
Section 3 introduces the main axioms and main representation theorem for our more general
mean-dispersion preferences. We show how the model can accommodate (for example) decreasing
ambiguity aversion. In section 3.4, we provide a partial converse theorem for general meandispersion preferences and a full characterization for mean-dispersion preferences that are `smooth'
around certainty. We also show that if preferences admit two mean-dispersion representations like
expression (3) with two di erent weighting vectors
and
0
, then such preferences must satisfy
constant absolute ambiguity aversion.
Section 4 provides examples and discusses monotonicity and convexity of the preferences. We
also axiomatize a model that sits between general mean-dispersion preferences and variational
preferences in that the representation is fully separable in the mean and dispersion but does not
require the (quasi-)linearity in the mean of expression (2). And we provide conditions under
which mean-dispersion models are probabilistically sophisticated. Finally, we contrast attitudes
to ambiguity as re ected by the function (:) with those in other approaches such as that of Ergin
& Gul (2007).
2
The MMR Model - an interpretation.
We work in a standard Anscombe-Aumann setting. To simplify, let the state space S be nite,
i.e. S = fs1 ; : : : ; sn g.5
Let X be the set of simple probability measures on a set of prizes. An
act is a function f : S ! X. With slight abuse of notation, any x in X will also denote the
constant act that yields x in every state. Let F denote the set of acts and continuing our abuse of
notation, X shall also denote the set of constant acts. Both the sets X and F are mixture spaces.
In particular, for any pair of acts f and g in F, and any
5
in (0; 1), take f + (1
MMR (2006a) work in an in nite state space while MMR (2006b) work in a nite state space.
5
) g to be the
act h 2 F, in which h (s) = f (s) + (1
) g (s), for each s in S.
The decision maker's preferences on F are given by a binary relation %. Let
denote the
denote indi erence derived from % in the usual way. For a xed f in F,
strict preference and
a constant act xf is a `certainty-equivalent' of f if f
xf .
Maccheroni, Marinacci and Rustichini (hereafter MMR) consider the following axioms.
A.1 Weak Order. % is transitive and complete.
A.2 Weak Certainty-Independence. For any pair of acts f and g in F, any pair of constant acts
x and y and any
in (0; 1),
f + (1
) x % g + (1
) x ) f + (1
) y % g + (1
) y.
) g % hg and
A.3 Continuity. For any three acts f; g and h in F, the sets f 2 [0; 1] : f + (1
f 2 [0; 1] : h % f + (1
) gg are closed.
A.4 Monotonicity. For any pair of acts f and g in F, if f (s) % g (s) for all s 2 S then f % g.
A.5 Uncertainty Aversion. For any pair of acts f and g in F and any
f
g ) f + (1
in (0; 1),
)g % f
A.6 Non-degeneracy. For some pair of acts f and g in F, f
g.
If we remove axiom A.5 and substitute the standard independence axiom for A.2, then we
obtain the subjective expected utility model. Gilboa & Schmeidler (1989) obtained their multipleprior model by adding A.5 and weakening independence only to apply to mixtures with constant
acts. Their axiom is equivalent to the following:
A.20 Certainty-Independence. For any pair of acts f and g in F, any pair of constant acts x and
y and any ;
in (0; 1],
f + (1
) x % g + (1
) x ) f + (1
6
) y % g + (1
) y.
MMR's axiom A.2 is a signi cant weakening of this. The key di erence is that the weights in
Gilboa & Schmeidler's axiom,
and , may di er along with the constant acts x and y whereas
in MMR's axiom A.2 the weight
is xed: only the constant act changes. In section 3, we weaken
this axiom still further.
In all these approaches, the rst stage is to show that the axioms induce an expected utility
representation over the set of constant acts (i.e., over lotteries).6 Once we have introduced a utility
function on the constant acts, it is natural to map each act to its corresponding state-utility vector,
and to consider the preference relation over these state-utility vectors induced by the underlying
preferences over acts. Thus, let U : X ! R be a von Neumann-Morgenstern representation of the
preferences on constant acts. Then:
De nition 1 (State Utility Vectors) For each f in F, let U
Rn de ned by [U
f be the state-utility vector in
f ] (s) = U (f (s)).
To avoid confusion, we will use upper-case U to denote a utility function and lower case u, u0 , and
u00 to denote generic state-utility vectors.
n
The set of utility vectors induced by U , that is, (U (X)) := fU
f 2 Rn : f 2 Fg, will gener-
ally not include all of Rn . It is convenient, however, to work with the whole of Rn . MMR achieve
this by adapting an axiom of Kopylov (2007, p.5). We use it in its the original form.
A.6 Unboundedness. For any pair of acts f and g in F and any
in X satisfying g
w + (1
) f and z + (1
)g
2 (0; 1), there exist w and z
f .7
With this in place, we can de ne preferences over all state-utility vectors in Rn as follows.
De nition 2 (Induced Preferences) Let %u be the binary relation on Rn de ned by u0 %u u00
if there exists a corresponding pair of acts f 0 and f 00 in F with U f 0 = u0 and U f 00 = u00 , such
that f 0 % f 00 .
6 In MMR's case, this is achieved by showing that their axioms imply Hernstein & Milnor's (1953) weak version
of independence on the constant acts which (given their strong continuity assumption) is su cient for an expected
utility representation
7 MMR only require one of w or z to exist, not necessarily both. Using the slightly stonger condition slightly
simpli es the exposition. MMR's unboundedness axiom is their A.7. Since Strong Unboundedness trivially implies
non-degeneracy, we number it A.6 .
7
Given monotonicity and unboundedness (axioms A.4 and A.6 ), this induced preference relation
over state-utilities inherits order and continuity. Monotonicity and weak-certainty independence
(axioms A.2 and A.4) imply that %u is monotone in the sense that if u0
u00 then u0
u
u00 .
And the uncertainty aversion, axiom, A.5, implies that %u is convex. Constant acts are mapped
to constant state-utility vectors. Let e = (1; : : : ; 1) 2 Rn . We will refer to the set fke : k 2 Rg as
the constant-utility line. By unboundedness and weak certainty independence, there are constant
acts that correspond to each point in this line. In particular, there is a constant act x0 in X, such
that U
2.1
x0 = 0e.
Primal Representation.
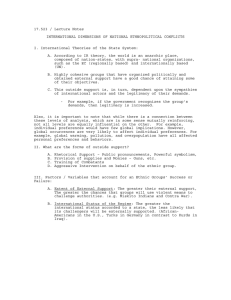
Recall that MMR's key innovation is their new weaker certainty independence axiom (A.2). Figure
1 illustrates this axiom in state-utility space. Let the points on the constant-utility line U x and
U y correspond to the constant acts x and y. Suppose that f +(1
the points U f + (1
) U x and U g + (1
)x
g +(1
) x. Thus,
) U x lie on the same indi erence curve in the
state-utility space.8 Axiom A.2 then implies that U f + (1
) U y and U g + (1
)U y
also lie on the same indi erence curve. More generally, any indi erence set in state-utility space
can be obtained from any other by a translation parallel to the constant-utility line.
The following property formalizes this idea.
De nition 3 (Translation Invariance.) For any pair of utility vectors u0 and u00 in Rn , and
any
2 R, u0 %u u00 ) u0 + e %u u00 + e.
In state-utility space, translation invariance and weak certainty independence are equivalent.
Lemma 1 (Translation Invariance [MMR 2006a]) Given A.1 (weak order), A.3 (continuity), A.4 (monotonicity) and A.6 (unboundedness), the preferences % over acts F satisfy A.2
(weak certainty independence) if and only if the induced preferences %u over state-utility vectors
in Rn satisfy translation invariance.9
8
Recall that the utility function U on X is a ne, so U
9
[ f + (1
) x] = U
f + (1
)U
x.
This result is part of MMR's lemma 28 in appendix B. MMR refer to translation invariance as vertical
invariance.
8
utility in
state 2
0
45 degree line
("constant-utility line")
Uof
αUof +(1−α)Uoy
αUof +(1−α)Uox
Uoy
αUog +(1−α)Uoy
Uog
αUog +(1−α)Uox
Uox
utility in state 1
Figure 1: Weak Certainty Independence implies Translation Invariance in State-Utility Space
The equivalence of weak certainty independence and translation invariance ties down the relationship of MMR's model of ambiguity aversion both to models of risk aversion and to models of
inequality aversion. For example, in social choice, this translation invariance property is known
as \invariance to changes in the common zero".10
We can adapt representation results from these other literatures back to the context of choice
under uncertainty to obtain a `primal' representation corresponding to MMR's `dual' representation. In particular, given translation invariance, we can nd a quasi-linear representation of %u ,
which decomposes into a linear term that can be thought of as a \mean" state-utility minus a
term that depends only on the state-by-state di erences in state-utilities from that \mean". To
make this more precise, for each
2 R and each
constant state-utility vector e with normal vector
2 Rn , let H be the hyperplane though the
; that is, H
= f^
u 2 Rn :
u
^ = g. The
idea for the following representation comes from Roberts's (1980) social choice paper.
10
See, for example, Roberts (1980) Moulin (1988, p.44), and Mas-Colell, Whinston & Green (1995, pp.834-6).
9
Theorem 2 (Primal Representation) A preference relation %u de ned on Rn satis es order, continuity, monotonicity, translation invariance, and convexity if and only if there exist a
monotone function W : Rn ! R that represents %u and takes the form
W (u0 ) =
where
is a vector of non-negative weights (i.e.,
`mean' given by
:=
(d) :
n
2 [0; 1] such that
e = 1),
u0 ; d 2 H 0 is the vector of `di erences' given by d := u0
: H 0 ! R+ is a convex function with
2 R is the
e; and where
(0) = 0.
Notice that, although axiom A.5, uncertainty aversion, by itself only implies quasi-concavity of a
representation, when combined with weak certainty independence it implies that the subtracted
function
(:) is convex not just quasi-convex.
Theorem 2 is written as a representation result for %u , but, of course, we can obtain a representation over the underlying preferences % over acts, by setting V (f ) := W (U
f ). The theorem
tells us that any preference relation on nite-state acts that admits a (dual) representation of the
form of expression (1) { that is, any variational preference | also admits a (primal) representation
of the form of expression (2). Whereas MMR's representation allows us to characterize variational
preferences by a pair (U; c), this representation requires a triple (U; ; ). Notice that, in this
representation, the mean utility
associated with an act f is equal to the utility of the `mean'
P
constant act; i.e., the act that yields s s f (s) in every state.
Some examples of primal and dual representations of variational preferences are given in section
2.4, but rst let us focus on interpretation.
2.2
Interpretations and geometry.
To help understand this representation, consider gure 2 which is drawn for the case where preferences are smooth. Let f be an act with certainty equivalent xf , and let U ( ) be a expected-utility
representation for the constant acts. The primal representation sets V (f ) = U (xf ). Thus, in the
picture, the state-utility vector U
The probability vector
f is indi erent to the constant state-utility vector U (xf ) e.
is chosen to be normal to a tangent hyperplane of this indi erence
curve at U (xf ) e. Since preferences are smooth in this example, this choice is unique, and
10
is
equal to the normalized gradient at U (xf ) e. To see the decomposition in the representation, let
:=
(U
f ). Thus, in the picture, the point
every state gives the mean of U
e is the constant state-utility vector that, in
f according to the probability ; and
=
V (f ) is just the
di erence between this mean utility and the utility of the certainty equivalent.
Mean-dispersion representation
utility in
state 2
0
45 degree line
("constant-utility line")
Uof
U(xf )e
d2
µe
d1
π
µ
ρ
utility in state 1
Figure 2: Illustration of Absolute Ambiguity Premium
We can view the
as a measure of the agent's dislike of dispersed state utilities: it is the
premium (measured in utility) that the agent would be willing to pay to eliminate dispersion of
state utilities. The vector d on which
depends is given by U f
e. By translation invariance,
another act g that induces a state-utility vector with a di erent mean but the same vector d of
di erences from that mean, will have the same `ambiguity premium' . In this sense, the agent
can be thought of as having \constant ambiguity aversion".
In the construction above, we chose
to be normal to the supporting hyperplanes of the upper
contour sets on the constant-utility line. More generally, the representation in theorem 2 requires
11
such a
to be chosen. (This follows from the restriction that
preferences are \smooth", the choice of
0 and
(0) = 0.) Thus, if
in the representation is unique; in fact, smoothness
around the constant-utility line is enough. In this case, the representation is unique up to the
choice of the a ne utility function U ( ). But not all variational preferences are smooth around
the constant-utility line. For example, in the case of multiple prior preferences, any
from the
multiple-prior set admits a representation in this form of expression (2). In this case, the mean
and the dispersion term
(and hence the ambiguity premium) associated with any act will depend
on the choice of . Nevertheless, loosely speaking, the set of ambiguity premia associated with an
act (one for each ) are still independent of the set of mean utilities (one for each ).11
Some readers may be uncomfortable identifying constant ambiguity aversion with a constant
ambiguity premium, especially in cases (like multiple priors) where the premium depends on the
choice of probability vector
in the representation. Therefore, consider an alternative notion.
In the analysis of risk, an alternate de nition of non-increasing absolute risk aversion is (abusing
our notation): for all
~ and degenerate random variables x, if
in (0; 1), all random variables X
~ is weakly preferred to the degenerate random variable x then for
the random variable x + X
any
~ is weakly preferred to the improved
> 0, the `improved' random variable (x + ) + X
degenerate random variable x + . That is, the set of acceptable bets from any given wealth level
is no larger than is the case for a larger wealth level. Non-decreasing absolute risk aversion can
be de ned similarly.
Translating this into the language of acts, we obtain:
De nition 4 (NiAAA and NdAAA) We say that the agent exhibits non-increasing absolute
ambiguity aversion (NiAAA) if, for any act f in F , any
2 (0; 1), and any pair of constant acts
x and y, such that y % x,
f + (1
) x % x ) f + (1
11
) y % x + (1
) y.
(4)
More formally, x a utility representation u on the constant acts. Each vector that admits a representation
of the form of expression (2) maps each act f to a vector ( ; d) where where :=
u f and d := u f
e.
Consider another act g and suppose that, for each admissible vector , the associated vector is ( 0 ; d0 ) . Given
variational preferences, if for each admissible , we have ( 0 ; d0 ) = ( + ; d) for some 2 R, then the set of
ambiguity premia associated with f is equal to the set of premia associated with g.
12
We say the agent exhibits non-decreasing absolute ambiguity aversion (N dAAA) if expression (4)
holds for any act f in F , any
2 (0; 1), and any pair of constant acts x and y, such that x % y.
And we say the agent exhibits constant absolute ambiguity aversion. (CAAA) if it exhibits both
NiAAA and NdAAA.
In expression (4), if the old act f +(1
new act f + (1
) x is weakly preferred to the old constant act x then the
) y (improved by substituting y for x with weight (1
to the new constant act x + (1
)) is weakly preferred
) y (improved by substituting y for x with weight (1
)).
The following proposition con rms our intuition that MMR's axiom A.2 implies constant
absolute ambiguity aversion.
Proposition 3 (A2 and CAAA) Given A.1 (weak order), A.3 (continuity), A.4 (monotonicity) and A.6 (unboundedness), the preferences % satisfy A.2 (weak certainty independence) if and
only if they exhibit CAAA and satisfy independence on the constant acts.
To summarize: theorem 2 tells us that variational preferences have an alternate `primal' representation. This representation decomposes the value of an act into a mean utility and a dispersion
term that only depends on di erences from that mean. We can think of this di erence term as an
(absolute) ambiguity premium, the amount that the agent would pay to eliminate all ambiguity.
MMR's key axiom, weak certainty independence, is equivalent to assuming that this premium is
independent of the mean utility or that the agent exhibits constant absolute ambiguity aversion.
Section 3 extends the variational preference model to allow the ambiguity premium (and ambiguity
aversion) to vary.
2.3
Geometry of the dual representation.
As an aside, we can also use a similar picture to illustrate the construction of MMR's dual
representation of the same preferences. MMR's representation decomposes V (f ) into a mean
utility according to a probability vector p and a term c (p). Again, let f be an act with certainty
equivalent xf , and let U ( ) be a expected utility representation for the constant acts. Again, the
representation will set V (f ) = U (xf ). Thus, in gure 3, the state-utility vector U
13
f is again
indi erent to the constant state-utility vector U (xf ) e. The probability vector p is again chosen
to be normal to a tangent hyperplane of this indi erence set but this time the tangency is at U f
instead of at U (xf ) e. Since preferences are smooth in this example, this choice is unique, and p
is equal to the normalized gradient at U
f . Notice that p, unlike , varies with the act f . To
see the decomposition in the dual representation, let
:= p (U
f ). Thus, in the picture, the
point e is the constant state-utility vector that, in every state, gives the mean of U f according
to the probability p. And, as also shown, c (p) = V (f )
is the di erence between the utility of
the certainty equivalent and the mean utility according to p.
MMR's variational representation
utility in
state 2
0
p
45 degree line
("constant-utility line")
Uof
υe
υ
U(xf )e
c(p)
utility in state 1
Figure 3: Illustration of MMR's Dual Representation
In the dual interpretation, a malevolent nature chooses p to minimize the agent's utility after
the agent's choice of the act f (and hence of the state-utility vector U
f ). The quantity c (p)
is then the amount that nature must pay back to the agent. The agent gets her expected utility
according to p plus this payback. In our smooth case, for any p0 we can nd c (p0 ) as follows. First,
as is illustrated in gure 4, we nd a state-utility vector u0 indi erent to U f such that the normal
14
hyperplane of p0 supports the upper contour set at u0 . We can then compute c (p0 ) = V (f ) p0 u0 .
In gure 4, if nature chooses p0 6= p, then (as shown) the increase in the payback, c (p0 )
is greater than the reduction in the expected utilities, (p
p0 ) (U
c (p),
f ). In this discussion, the
construction of the payback function c (:) was for the particular indi erence set containing the
chosen state utility vector U f . Translation invariance ensures that, if we started from an act in
a di erent indi erence set, the payback function c (:) so generated would be the same.
utility in
state 2
p'
u'
0
p
45 degree line
("constant-utility line")
Uof
υe
(p-p')·(Uof)
U(xf )e
c(p')-c(p)
υ
c(p)
utility in state 1
Figure 4: Malevolent nature's minimization problem.
2.4
Examples
Theorem 2 tells us that any preference relation that admits a representation of the form of expresP
sion (1), minp2 (S) s ps U (f (s)) + c (p), also admits a representation of the form of expression
P
(2),
(d) where
=
. In this section we present
s s U (f (s)) and ds = U (f (s))
well-known examples of preferences that we are used to seeing represented in the dual form, and
show their primal representation. And we present well-known examples of preferences that we are
15
used to seeing represented in their primal form, and show their dual representation. A list of the
examples is given in table 1.
Subjective Expected Utility. The natural benchmark is the subjective expected utility model
P
(SEU), s s U (f (s)). Such preferences can be expressed in the form of expression (1) by setting
c (p) = 1 for any p 6= . They can be expressed in the form of expression (2) by setting (d)
0.
Multiple Priors. The standard Gilboa-Schmeidler (1989) representation for multiple-prior prefP
erences is minp2D s ps U (f (s)) where D is a convex, compact set of probability vectors on S.
MMR (2006) show that this can be expressed in the form of expression (1) by setting c (p) = 0 for
any p in D, and c (p) = 1 otherwise. In appendix B, we show that the same preferences can be
expressed in the form of expression (2) by choosing a
from the multiple-prior set (i.e.,
2 D),
and setting
(d) = maxp2D
P
s
ps d s .
Going in the other direction, one might ask which preferences that can be expressed in the
form of expression (2) also have multiple-prior representations? The answer is a corollary of results
in Safra & Segal (1998), Chambers & Quiggin (1998), and Quiggin & Chambers (2004): if the
dispersion function
(:) is linearly homogenous and convex and the induced preferences %u over
state utility vectors are monotone then the preferences have a multiple-prior representation.
Multiplier Preferences. Hansen & Sargent (2001) introduced this class of variational preferences in the context of robust control. Their standard representation is in the form of expression
(1) with c (p) := R (pj ) where
> 0 and R (pj ) is the relative entropy of the probability p
P
with respect to ; that is, R (pj ) = s ps log (ps = s ) if p
, and 1 otherwise. Maccheroni,
Marinacci and Rustichini (2006b) show that these preferences have a primal representation which
P
can be written as12
ln [ s s exp ( U (f (s)) = )]. But (see appendix B) we can easily convert
this into a representation in the form of expression (2) where
12 See also Dupuis & Ellis (1997, Prop 1.4.2, pp.33-4). We thank Massimo Marinacci for sending helpful notes
on this paper.
16
(d) := ln
hX
s
s
i
exp ( ds = ) .
(5)
Monotone Mean-Variance Preferences. The standard representation of mean-variance preferences appear to take the form of expression (2) with
(d) :=
1 X
s
2
2
s ds .
But mean-variance preferences are not monotone. Nevertheless, MMR (theorem 24, p. 1474-5)
show that, if we restrict the domain of the preferences to the convex set on which monotonicity
holds, then these monotone mean-variance preferences can equivalently be written in the form
of expression (1) with c (p) := G (pj ) =2 where G (pj ) is the Gini concentration index of the
2
P
, and
probability p with respect to the probability ; that is, G (pj ) := s pss 1
s if p
1 otherwise.
Mean-Standard Deviation Preferences. The standard representation of these preferences
take the form of
(d) :=
for some
2
= 1+
X
s
2
s ds
1
2
.
> 0. Grant & Kajii (2007) show these preferences are monotone provided
2
3.1
>
for all s in S. They also show that these preferences have a representation in the
form of expression (1) { in fact, a multiple-prior representation where D := fp : G (pj )
3
s
2
g.
Mean-Dispersion Preferences
The Axioms
The remainder of the paper is concerned with the more general weakly separable, mean-dispersion
preferences of expression (3). In moving in this direction, we will weaken several of MMR's axioms.
The key change, however, is to further weaken their weak certainty independence axiom (A.2.) so
that it only applies when two acts have a \common mean". To do this, we need to have a notion
of a \mean" that can be derived directly from the underlying preferences over acts.
17
De nition 5 (Mean) Fix an act f . A constant act, denoted by m (f ) in X, is de ned to be a
mean of f if there exists an act g and
m (f ); and (ii) f + (1
2 (0; 1], such that (i) for all s in S, f (s)+(1
) g % f + (1
) g for all
2 [0; 1]. Let M (f )
) g (s)
X denote the set of
means of f .
In words, for a constant act to be deemed a mean of the act f , there must exist another act g
and a weight
such that the act f + (1
) g yields in every state a lottery that is indi erent
to that constant act. Moreover, no other convex combination of f and g can be strictly preferred
to f + (1
) g. That is, f + (1
) g is a preference maximum among the set of mixtures of
f and g. Figure 5 illustrates this property in terms of the induced preferences over state-utility
vectors.
45 0 degree line
("constant-utility line")
Uof
U(m(f))e = αUof +(1−α)Uog
U og
Figure 5: For the constant vector m (f ) to be a mean of the act f , it follows from the de nition
of a mean, that the indi erence curve in state-utility space through the constant (state-utility)
vector u (m (f )) e must lie above the chord joining the vectors u f and u g.
The axioms below ensure that each act has a mean. But in general, the mean will not be
unique: in fact, x,y 2 M (f ) does not even imply x
y. We will return to these issues in section
3.4.
Once we have de ned a mean, the de nition of a common mean is follows naturally.
18
De nition 6 (Common Mean) Fix a pair of acts f and g. We say f and g have a common
mean if M (f ) \ M (g) is not empty.
We can now state our axioms.
A.1 Weak Order. % is transitive and complete.
A.2
Common-Mean Weak Certainty-Independence. For any pair of acts f; g in F, any pair of
constant acts x; y in X and any
in (0; 1): if f and g share a common mean then
) x % g + (1
f + (1
) x ) f + (1
) y % g + (1
) y.
A.3 Continuity. For any three acts f; g and h in F, the sets f 2 [0; 1] : f + (1
f 2 [0; 1] : h % f + (1
A.4
A.5
) gg are closed.
Indi erence Substitution. For any pair of acts f and g in F, if f (s)
then f
) g % hg and
g (s) for all s 2 S,
g.
Weak Uncertainty Aversion. For any nite set of indi erent acts f1 ; : : : ; fm in F (that
is, f1
fj for all j = 2; : : : ; m) and any constant act x in X, if the convex combination
a1 f1 + : : : + am fm = x then x % f1 .13
A.6 Unboundedness. For any pair of acts f and g in F and any
in X satisfying g
A.7
w + (1
) f and z + (1
)g
2 (0; 1), there exist w and z
f.
Weak Certainty-Monotonicity. For any pair of acts f and g in F, any pair of constant acts
x and y in X, and any
g + (1
in [0; 1), if f + (1
) x % f + (1
) y then g + (1
)x %
) y.
Axioms A.1 and A.3 are standard and identical to MMR's axioms. Axiom A.4 weakens
MMR's A.4 so that it only pertains to indi erence. Thus, A.4 does not imply monotonicity.
Axioms A.5 and A.7 concern convexity and monotonicity, respectively. Since Gilboa &
Schmeidler (1989), a theme in the literature on ambiguity has been to restrict axioms only to
13 Chateauneuf and Tallon (2002, De nition 4, p516) refer to this axiom as `preference for sure \expected" utility
diversi cation.'
19
apply where constant (that is, unambiguous) acts are involved. Axiom A.5 restricts uncertainty
aversion only to apply where the mixture is a constant act. Axiom A.7 restricts monotonicity
only to apply when mixing with better or worse constant acts.
To compare axiom A.5 with standard axioms, rst consider the following axiom:
A.50 Uncertainty Aversion. For any nite set of indi erent acts f1 ; : : : ; fm in F (that is, f1
fj
for all j = 2; : : : ; m), any convex combination a1 f1 + : : : + am fm % f1 .
Clearly axiom A.50 is stronger than A.5 , since it omits the quali er that the mixed act need be
constant. But lemma 22 in the appendix shows that, given weak order and continuity, axiom A.50
and MMR's axiom A.5 are equivalent. The intuition behind the standard uncertainty aversion
axioms is that mixing indi erent acts provides a hedge against subjective uncertainty. The new
axiom only requires this mixing to be preferred if it provides a `perfect hedge'; that is, if all
subjective uncertainty is removed. It does not require all partial hedges to be preferred.14
Thus, axiom A.5 does not require the induced preferences in state-utility space to be convex.
Nevertheless, we show in section 4.2 that this weak uncertainty aversion axiom is just enough
to ensure that our mean-dispersion preferences are `weakly ambiguity averse' in the sense of
Ghirardato et al (2004). And in section 4.5, we argue that the standard uncertainty aversion
axiom A.5 may be too strong in that it imposes more than just an aversion to variation across
states.
To compare axiom A.7 with the standard axioms, rst notice that, like MMR's axiom A.2,
it involves mixing general acts with constant acts. Roughly, MMR's axiom A.2 says that the
preference between two general acts f and g in such mixtures is maintained as we substitute
constant act x with constant act y. Axiom A.7 says that the preferences between two constant
acts x and y in such mixtures is maintained as we substitute act f for act g. If we add MMR's
axiom A.4. to A.2 then we induce preferences over state-utility vectors that satisfy the following
monotonicity property: if u0
u00 then u0
u
u00 . If we add axiom A.4 to A.7 , then we induce
preferences over state-utility vectors that satisfy the following much weaker monotonicity property:
14 This is somewhat analogous to Yaari's notion of weak risk aversion: the expectation of a lottery is weakly
preferred to the lottery itself, but the agent is not averse to all mean-preserving spreads.
20
if u0 = u00 + ce where c > 0 then u0
u
u00 . In section 4.1, we provide examples of preferences that
seem natural (or at least interpretable) but which only satisfy this weaker monotonicity.
As discussed already, axiom A.2 weakens MMR's certainty independence axiom A.2 so that
it only applies when the underlying acts f and g have a common mean. Recall from proposition
3 that MMR's axiom A.2 forces preferences to have constant ambiguity aversion as we change
mean utility. Our weaker axiom A.2 removes precisely this implication: that is, (see corollary 6
below) strengthening A.2 to A.2 is exactly equivalent to imposing constant ambiguity aversion.
An analogy may be useful here. Gilboa-Schmeidler weakened Anscombe-Aumann's independence
axiom to certainty independence to retain the original axiom's intuitive appeal while shedding it
of its unwanted implication that the agent should be indi erent to hedging. We weaken MMR's
weak certainty independence axiom to retain the original axiom's intuitive appeal while shedding
it of its unwanted implication that the agent should have constant ambiguity aversion. We will
discuss the geometry of this claim in section 3.3 below.
3.2
The main theorem
We can now state our main result. Recall that H 0 is the hyperplane though the constant stateutility vector 0 with normal vector .
Theorem 4 (Main Theorem) Suppose that the preferences % on F that satisfy A.1 (weak order), A.2 (weak common-mean certainty independence), A.3 (continuity), A4 (indi erence substitution), A5 (weak uncertainty aversion), A.6 (unboundedness), and A.7 (weak certaintymonotonicity). Then there exist an unbounded a ne utility function U : X ! R, a vector of
P
weights 2 Rn such that s = 1, a continuous function : H 0 ! R+ with (0) = 0, and a
continuous function ' : R
H 0 ! R increasing in the rst argument and decreasing in the
second with ' (y; 0) = y for all y in R, such that the preferences are represented by
V (f ) = ' ( ; (d))
where
2 R is the `mean' given by
by d := U
f
:=
(U
f ), and d 2 H 0 is the vector of `di erences' given
e.
21
In this representation, the parameter
utility function U ( ) and the weights
represents the \mean utility" of the act f using the
. The vector (d1 ; : : : ; dn ) is a vector of state-by-state
di erences from that mean utility. We can think of the function
representation is weakly separable in the mean
decreasing in the latter. The normalization
The normalization ' ( ; 0) =
as a measure of dispersion. The
and dispersion , increasing in the former and
(0) = 0 ensures that dispersion is always disliked.
is inessential but ensures that the value of a constant act x is equal
to the utility of that act, V (x) = U (x), and hence that the value of a general act f is equal to
the utility of its certainty equivalent, V (f ) = U (xf ).
The theorem above suggests the following de nition.
De nition 7 (Mean-Dispersion Preferences) We say that preferences are mean-dispersion
preferences if they admit a representation in the form given in Theorem 4. We will refer to the
representation ('; ; U; ) as a mean-dispersion representation.
Notice that theorem 4 is not a full characterization of mean-dispersion preferences. In particular, the theorem does not say that all preferences de ned by such a V (:) satisfy all the axioms.
Notice also that theorem 4 does not contain a uniqueness claim. We will return to both these
issues in section 3.4 below. But rst, let us relate the mean-dispersion representation back to our
discussion of variational preferences, in particular in the context of the induced preferences %u
over state-utilities.
3.3
Interpretation and Geometry
Recall that, for a given utility function U and weights
:=
(U
f ) and the di erence vector d := U
f
, an act f induces the mean-utility
e. Furthermore, we can think of the
absolute uncertainty premium associated with the act f as the di erence
U (xf ) between the
mean utility and the utility of the certainty equivalent. For variational preferences, this premium
was just given by the measure of dispersion
and was independent of the mean utility . With
general mean-dispersion preferences, the premium is given by ' ( ; 0)
premium depends not just on the measure of dispersion
the mean utility .
22
' ( ; (d)). Thus, the
but also on ' which in turn depends on
Figure 6 illustrates how the key axiom, common-mean certainty independence, allows ambiguity premia to vary. It is drawn for the case where preferences are smooth and monotonic. As
usual, let U be an expected-utility representation for the constant acts. Let f and g be a pair of
acts with common mean x. In state-utility space, what this means is that U
f and U
g must
both lie in a supporting hyperplane of the (weak) upper contour set of the induced preferences %u
through e, where
= U (x) (see lemma 29 in the appendix for details). In this example, since
preferences are smooth, the supporting hyperplane is unique. Let
denote its normal vector.
αUof +(1−α)U(y)e
Uo f
0
45 degree line
("constant-utility line")
U(y)e
µ'e
µe
αUof +(1−α)U(x)e
αUog +(1−α)U(y)e
V(αf +(1−α)x)e
αUog +(1−α)U(x)e
µ − ϕ(µ,ρ(δ))
µ'− ϕ(µ',ρ(δ))
π
Uog
Figure 6: Illustration of (weakly-separable) mean-dispersion preferences with non-constant absolute ambiguity premium.
Now suppose f + (1
the utility vectors U f +(1
) x is indi erent to g + (1
) x. In the picture, this corresponds to
) U (x) e and U g+(1
) U (x) e lying on the same indi erence
23
curve. By construction, these two utility vectors also lie on the hyperplane with normal vector
through e. Thus each of these two state-utility vectors has the same mean with respect to .
Their certainty equivalent is given by the vector V ( f + (1
) x) e.
Next consider some other constant act y and the two new acts f +(1
) y and g+(1
) y.
Since f and g have a common mean, we can apply axiom A.2 . Hence the the state-utility
vectors
U
f + (1
) U (y) e and
U
g + (1
) U (y) e must lie on the same indi erence
curve. Again by construction the two new state-utility vectors
U
g + (1
U
f + (1
) U (y) e have the same mean with respect to ; in this case
0
) U (y) e and
. In fact, each of
these two new indi erent vectors is obtained from the two old indi erent vectors by the common
translation (1
) (U (y)
U (x)) e (that is, a translation parallel to the constant-utility line).
More generally, lemma 30 in the appendix shows that axiom A.2 implies the following weaker
translation invariance property of the induced preferences that applies only for pairs of state-utility
vectors that share a common mean with respect to .
De nition 8 (Common-Mean Translation Invariance.) Suppose H is a supporting hyperplane of the uppercontour set of %u through e. Then for any pair of utility vectors u0 and u00 in
H , and any
2 R, u0 %u u00 if and only if u0 + e %u u00 + e.
This is weaker than the translation invariance property implied by MMR's axiom A.2. In particular there is no requirement that, if we apply the same common translation (1
to the entire indi erence curve through V ( f + (1
) (U (y)
U (x)) e
) x) e, then all points in the new translated
curve will be indi erent. The reason is that not all the points on the original indi erence curve
had the same mean. In our picture, the actual indi erence curve through U f + (1
) U (y) e
is less bowed toward the origin.
Now consider ambiguity premia. The mean of the rst two vectors was
= ' ( ; 0). Since
they had the same mean and were indi erent, they must have the same dispersion term : that
is, the utility of their certainty equivalent is V ( f + (1
) x) = V ( g + (1
Thus the ambiguity premium associated with the rst two vectors is just
of the second two vectors was
0
) x) = ' ( ; ).
' ( ; ). The mean
. By construction, they had the same vector of di erences from
this mean as the rst two vectors, hence their dispersion term was also . Thus, the utility of
24
their certainty equivalent V ( f + (1
premium is just
0
) y) = V ( g + (1
) y) = ' ( 0 ; ), and their ambiguity
' ( 0 ; ). But, as shown, these premia need not be the same: in the illustrated
case, the ambiguity premium decreased as we increased the mean utility holding the dispersions
xed.
More generally, we can ask under what condition do mean-dispersion preferences exhibit both
non-increasing ambiguity premia as de ned by ' ( ; 0)
' ( ; (d)), and non-increasing absolute
ambiguity aversion (NiAAA) as de ned in section 2. The following proposition provides the
answer.
Proposition 5 (NiAAA) Suppose that the preferences % admit the mean-dispersion representation ('; ; U; ). Then the following three properties are equivalent:
(a) the preferences % exhibit NiAAA
(b) the ambiguity premium, ' ( ; 0) ' ( ; ), is decreasing in
for all
(c) ' ( + ; )
2
'( ; ) +
for all
2 R, all
0, and all
2 R and all
2
H0 ;
H0 .
The following corollary tells us (as the pictures suggest) that mean-dispersion preferences
satisfy MMR's stronger independence axiom A.2 if and only if ambiguity premia are constant.
Corollary 6 Suppose that the preferences % admit the mean-dispersion representation ('; ; U; ).
Then the following are equivalent: (i) preferences satisfy MMR's axiom A.2 (weak certainty independence); (ii) preferences exhibit CAAA; and (iii) ' =
.
One set of examples of mean-dispersion preferences that allow for varying premia are those
that correspond to Epstein's (1985) generalized mean-variance preferences (translated from risk
to uncertainty). But those preferences also violate monotonicity. The following is an example of
mean-dispersion preferences that exhibit decreasing absolute ambiguity aversion but are monotone.
Example 1 (Generalized Multiplier Preferences) Consider the mean-dispersion representation ('; ; U; ) where U is an unbounded a ne utility function;
is a probability; (d) :=
P
ln ( s s exp ( ds = )) (which is weakly greater than zero by Jensen's inequality); and '( ; ) :=
25
( )
lim
where
!(+1)
: R ! R is a di erentiable function with
0
< 0, lim
!( 1)
( ) = 1 and
( ) = 0.
This example may be viewed as a generalization Hansen-Sargent multiplier preferences; indeed
the dispersion function
ences have
( )
takes the same form as expression (5) in section 2.4. Multiplier prefer-
1. Multiplier preferences are additively separable (in fact, quasi-linear) in
and , and have constant ambiguity aversion. The preferences in this example are only weakly
separable since
since the weight
3.4
appears in the term
( ). These preferences have decreasing ambiguity aversion
put on the dispersion is decreasing in .15
Converse theorems, smoothness and uniqueness.
We now consider converses to our main result, theorem 4. We shall show that any preferences
that have a mean-dispersion representation satisfy all our axioms except A.2 (weak commonmean certainty independence). To see why axiom A.2 causes a problem, consider the following
example.
Example 2 (Failure of A.2 ) Let S = fs1 ; s2 g. Let U be an unbounded a ne utility function;
and let
:= (1=2; 1=2). Consider the mean-dispersion preferences ('; ; U; ) where
is given by
one-third of the mean absolute variation, i.e., (d1 ; d2 ) = 31 [(jd1 j + jd2 j) =2]; and ' is given by
8
3
if
0
<
3
3
if 0 <
3 =2 .
' ( ; ) :=
:
if > 3 =2
This is an example of mean-dispersion preferences that are not fully separable in
and . The
example is illustrated in gure 7 in which indi erence sets for the induced preferences %u over
0
R2+ are Leontief in the half-space below the line below the line H(1=2;1=2)
, and constant slope
(1=2) (respectively,
0
2) in the half-space above the line H(1=2;1=2)
in which the utility in state
1 is greater than (respectively, less than) the utility in state 2.
Now consider the probability ^ := (2=3; 1=3). We will show a violation of equal-mean translation invariance with respect to ^ ; that is, axiom A.2 will not apply. Notice that ^ di ers from
the
15
used to de ne the preferences above, but, nevertheless, for any
Since
2 R, the hyperplane H ^
( ) < 1 for all , it follows that the preferences in this example are montonic.
26
is a supporting hyperplane of the uppercontour set of the induced preferences %u through
e.
Therefore, if x is the constant act such that U (x) = , then x satis es the de nition of a mean
for any act f such that U
( 1; 2) and U
f lies in the hyperplane H ^ . Let f and g be acts such that U
g =( 2; 1) (hence U
g =U
f
e). Let x and y be constant acts such that
U x =(0; 0) and U y =( 1; 1) (hence U y = U x
acts are mapped to utility vectors in H ^0 . But, y
[ 1]
utility vectors in H ^
f =
e). By construction f
x and both these
g even though both these acts are mapped to
. That is, common-mean translation invariance fails for acts that have a
common mean with respect to ^ . Since common-mean translation invariance is implied by axiom
A2 , this is a violation of the axiom.
constant-utility line
(-1,2)
(-2,1)
(0,0)
(-1,-1)
Hπ0
H^0
π
Figure 7: Indi erence Map for induced preferences %u corresponding to Example 2.
This example relies on two facts. First, the preferences are not `smooth'. Second, the weights
^ = (2=3; 1=3) used to construct the common mean di er from the weights
= (1=2; 1=2) that are
part of the representation ('; ; U; ). If we restrict attention to acts that have a common mean
27
`with respect to
= (1=2; 1=2)' then translation invariance holds. This motivates the following
de nition.
De nition 9 (Common mean with respect to ) Given an a ne utility function U : X !
P
R and a vector of weights 2 Rn such that s = 1, we say that two acts f; g 2 F have a
common mean with respect to
if
(U
f) =
(U
g).
The idea of example 2 generalizes to give us a partial converse to the main theorem.
Theorem 7 (Partial Converse) Suppose that the preferences % admit the mean-dispersion representation ('; ; U; ). Then the preferences % satisfy the axioms of the main theorem (theorem
4) except axiom A.2 (weak common-mean certainty independence); but the preferences do satisfy
weak certainty independence restricted to pairs of acts f ,g in F that share a common mean with
respect to .
We can obtain a more complete converse theorem by assuming that preferences are `smooth'.
In fact, we only need preferences to be `smooth' around constant acts; and we only need a very
weak notion of `smoothness'.
De nition 10 (Weak smoothness) We say that the mean-dispersion preferences ('; ; U; )
are weakly smooth (with respect to
(U
) at the constant act x if, for all acts f such that
f ) > U (x) there exists a t 2 (0; 1] such that ' (t + (1
as usual, d := U
f
:=
t) U (x) ; (td)) > U (x) (where,
e).
This is equivalent to saying that the induced preferences %u over state-utility vectors have the
property that, for all u0 2 Rn , if
u0 >
then there exists a t 2 (0; 1] such that tu0 +(1
t) e
u
e. This is a very weak smoothness property. In particular, lemma 35 in the appendix shows that
if
is di erentiable at 0 and the function ' is di erentiable at ( ; 0) for all
2 R then the
associated mean dispersion preferences are weakly smooth.
To ensure that mean-dispersion preferences are weakly smooth, we introduce the following
axiom that puts some natural structure on the shape of equal mean sets.
28
A.8* (Convex Equal-Mean Sets) For any pair of acts f and g and any constant act x, if
x 2 M (f ) \ M (g) then x 2 M ( f + (1
) g) for all
2 [0; 1].
In words, this axiom says that if the constant act x is a mean for both the act f and the act g,
then it should also be the mean for any act formed by taking a convex combination of those two
acts.
This axiom allows for a full characterization of weakly smooth mean-dispersion preferences.
Theorem 8 (Weakly smooth preferences) The preferences % on F satisfy the axioms of the
main theorem (theorem 4) plus axiom A.8 (convex equal-mean sets) if and only if there exists
a mean-dispersion representation ('; ; U; ) such that the preferences are weakly smooth (with
respect to this
0
6=
) at all constant acts. Moreover, in this case,
is unique: that is, there is no
for which % admits a mean dispersion representation.
We turn now to consider the issue of uniqueness beyond the case of smooth preferences. Since
mean-dispersion representations ('; ; U; ) have four components, there are several possible issues
of uniqueness. Most of these, however, are relatively mundane. Once we x a
admit a mean-dispersion representation, the normalization ' ( ; 0) =
And similarly, once we
x
; U and ', then the choice of
and U no cardinal restriction can be put on either
; U and
that
ensures that ' is unique.
is unique. But, if we only
x
or ' individually. That is, suppose that
('; ; U; ) de nes a mean-dispersion representation of the given preferences. Let ^ := t ( ) for
any continuous and increasing function t :
H 0 ! R with t (0) = 0. And let '
^ be de ned
by '
^ ( ; t (y)) = ' ( ; y). Then (^
'; ^; U; ) de nes another mean-dispersion representation for the
same preferences. This is a standard feature of representations that are only weakly separable:
changes in the \aggregator" and the \macro" function can be chosen to cancel each other out.
If we only x a
that admits a mean-dispersion representation, then we are of course still free
to choose U up to any positive a ne transformation. For example, suppose ('; ; U; ) de nes a
^ = aU +b for any a > 0 and any b in
mean-dispersion representation of the given preferences. Let U
R. Then, for example, let ^ be de ned by ^ (ad) := (d). And let '
^ be de ned by '
^ (a + b; y)
a' ( ; y) + b for all y in
^;
^ ; ^; U
H 0 . Then '
de nes another mean-dispersion representation
29
for the same preferences. (By the remarks in the previous paragraph, this choice of ^ and '
^ are
not unique.)
The more interesting issue concerns non-uniqueness of the weighting vector . Consider the
case where preferences % admit two mean-dispersion representations ('; ; U; ) and ('0 ; 0 ; U;
where
6=
0
0
)
. In this case, theorem 8 immediately implies that the induced preferences %u are
not `smooth around the constant-utility line', and that the preferences % must satisfy our axiom
A.2 restricted to pairs of acts that have a common mean with respect either to
or to
0
. But, in
fact, we get much more. We get full translation invariance; that is, the preferences satisfy MMR's
A.2.
Theorem 9 (Non-unique
implies CAAA) Suppose that the preferences % admit the two
mean-dispersion representations ('; ; U; ) and ('0 ; 0 ; U;
0
) where
0
6=
. Then the preferences
% satisfy A.2 (weak certainty independence) and hence CAAA.
The following uniqueness condition follows immediately.
Corollary 10 Suppose that the preferences % admit the mean-dispersion representation ('; ; U; ).
If % does not satisfy MMR's axiom A.2 then
is unique: that is, there is no
0
6=
for which %
admits a mean dispersion representation.
The proof of theorem 9 appears in the appendix. But the idea is this: if there are two weighting
vectors
and
0
,
6=
0
then we can nd a utility vector u1 such that
loss of generality suppose 0 is the constant vector such that 0
u
0
00
u1 <
u1 . Without
u1 . We construct a sequence of
points u1 ; u2 ; : : : converging to 0 such that for each j, uj and uj+1 are indi erent and either share
a mean with respect to
and transitivity, 0 + e
or with respect to
u
00
. Thus, by common-mean translation invariance
u1 + e for all ; that is, translation invariance applies to u1 and its
certainty equivalent. Finally, we show that all utility vectors in Rn can be approximated by points
like u1 .
One might think that any induced preferences %u on state-utility vectors that have a kink
at 0 can admit two mean-dispersion representations ('; ; U; ) and ('0 ; 0 ; U;
0
) where
6=
0
and hence that any kink at zero would induce preferences that satisfy CAAA. This conjecture,
30
however, is false. Recall the preferences in example 2. For these mean-dispersion preferences, there
is kink at 0 (indeed there is a kink at all points on the certainty line), but all mean dispersion
representations have the same
= (1=2; 1=2). Indeed, since these preferences do not satisfy
MMR's axiom A.2, theorem 9 shows that no other
0
6=
can form part of a mean-dispersion
representation for these preferences.
4
Properties and examples of mean-dispersion preferences.
In this section, we consider properties of mean-dispersion preferences beyond the fact that they
need not have constant ambiguity aversion. On the way, we show that mean-dispersion preferences
encompass many important families of preferences with each corresponding to a particular attitude
toward means and dispersion captured by particular forms of the functions ' and .
4.1
Monotonicity
Since theorems 4 and 7 do not require MMR's axiom A.4., we do not need to restrict meandispersion preferences to be monotonic. The obvious example of mean-dispersion preferences that
violate monotonicity is the mean-variance model.
Mean-Variance Preferences Mean-variance preferences are those mean-dispersion preferences
('; ; U; ) that satisfy CAAA (hence '( ; ) :=
P
1
2
> 0:
s s ds for some
2
),
is a probability; and
(d) :=
As MMR showed, these preferences satisfy all their axioms except monotonicity. But these preferences satisfy the weaker monotonicity requirements (axiom A7 ) of the general mean-dispersion
model, as do the more general mean-variance models of Epstein (1985).
A second example is given by the following version of mean-standard-deviation preferences.
For expositional purposes, the example is stated for two states, but it is straightforward to extend
the idea.
Example 3 (Extreme Mean-Standard Deviation) Let S = fs1 ; s2 g. Let U be an unbounded
a ne utility function; let
be a probability vector where (without loss of generality)
31
1
2.
Let
the mean-dispersion preferences given by V (f ) =
where is the mean and
p
deviation of the state utilities (with respect to ); and >
1= 2.
is the standard
Again, these preferences satisfy all the MMR axioms except their monotonicity axiom A.4 (see
appendix B for details) but they satisfy our weaker monotonicity axiom A.7 .
Decision theorists often disregard preferences that violate monotonicity arguing that such
preferences are irrational or uninterpretable. The concern is that, if we allow agents to violate
something as basic as monotonicity, then `anything goes'. We share some of these concerns. But
preferences that violate monotonicity in the sense of A.4 but which satisfy the weaker requirement
of A.7 are not uninterpretable. Such an agent still prefers to be given an extra dollar (or utile)
for sure; that is, she prefers to get the same extra payo in all states. But such an agent has an
extreme aversion to dispersion across states. We can think of her as so uncomfortable living with
uncertainty that she would be willing to accept an uncompensated reduction in her wellbeing in
the good states to reduce that anxiety. In the case of mean-variance preferences, this extreme
anxiety (enough to violate monotonicity) only sets in once the dispersion across states is large.
The preferences in example 3 are more extreme in that violations of monotonicity occur even
where there is no initial dispersion.16
While we can interpret such violations of monotonicity, we still might want to exclude them.
Not surprisingly, imposing MMR's monotonicity axiom achieves this. We might also want to allow
examples like the mean-variance preferences but to exclude examples like the extreme meanstandard deviation preferences that violate monotonicity even around certainty. The following
property of the underlying preferences over acts achieves this.
De nition 11 (Local Monotonicity around Certainty) For any acts f , g in F, and any
constant act x in X: (a) if f (s) % x for all s in S, and f (^
s)
exists
2 (0; 1), such that for all
in S, and x
in 0;
,
f + (1
g (^
s) for some s^ in S, then there exists
)x
x for some s^ in S, then there
x; and (b) if x % g (s) for all s
2 (0; 1), such that for all
in 0;
,
16 More precisely, since the mean-variance preferences are smooth, all uncertainty aversion is second order around
certainty. Mean-standard deviation preferences
exhibit rst-order uncertainty aversion around certainty even when
p
they are monotonic (i.e., even when <
s = (1
s ) for all s). In the extreme case where where monotonicity
fails, it does so at certainty.
32
x
g + (1
) x.
Mean-variance preferences satisfy this local monotonicity property but fails the usual global monotonicity. The preferences in example 3 fail even this local monotonicity property. Local monotonicity around certainty also restricts the weights
s
in a mean-dispersion representation to be
non-negative.17
For completeness, we summarize these in the following simple proposition (which we state
without proof).
Proposition 11 (Monotonicity) Suppose that the preferences % admit the mean-dispersion representation ('; ; U; ). Then
(a) the preferences % satisfy A.4 (monotonicity) if and only if the function W (u0 ) := ' (
u0 ; (u0
that represents %u is monotonic; and
(b) if the preferences % satisfy local monotonicity around certainty then
0.
Hereafter, we will refer to mean-dispersion preferences that satisfy MMR's A.4 as monotone.
4.2
Convexity.
Convexity properties of the underlying preferences are often interpreted as re ecting uncertainty
aversion or the desire to hedge (but see section 4.5). Theorem 4 did not require preferences to be
convex; that is, it did not require MMR's axiom A.5. The weaker requirement, axiom A.5 only
requires the agent to prefer complete hedges that remove all dispersion across states. The weak
uncertainty aversion of axiom A.5 is su cient to ensure the following property due to Ghirardato
& Marinacci (2002).
De nition 12 (Weak Ambiguity Aversion) We say that preferences are weakly ambiguity
averse if there exists an SEU preference relation %SEU such that for all constant acts x and
all acts f , x %SEU f =) x % f and x
SEU
f =) x
17
f.
Example 3 shows that local monotonicity around certainty, while su cient, is not necessary for
0. But
(see appendix B) the same preferences admit another mean-dispersion representation in which non-negativity of
the weights fails.
33
u0 ))
Proposition 12 . Suppose that the preferences % admit the mean-dispersion representation
('; ; U; ) where
0. Then the preferences are weakly ambiguity averse
This weak form of ambiguity aversion is satis ed by several important models. Ghirardato et
al (2004) introduced the family of invariant biseparable preferences where the induced preferences
%u over state-utility vectors has a representation W : Rn ! R that satis es monotonicity and
constant linearity; that is, for all u0 2 Rn ,
2 R, and
> 0; W ( u0 + e) =
W (u0 ) + .
Invariant biseparable preferences are examples of mean-dispersion preferences provided they are
weakly ambiguity averse.
Proposition 13 (Biseparable Preferences) (a) Suppose that the preferences % are invariant
biseparable (and unbounded). Then these preferences admit a mean-dispersion representation if
and only if they are weakly ambiguity averse.
(b) Suppose that the preferences % admit the monotone mean-dispersion representation ('; ; U; ).
Then the preferences are invariant biseparable if and only if they exhibit CAAA (hence ' ( ; ) =
for all
2 R and all
2
H 0 ); and the dispersion function
Notice that proposition 13(b) does not require
( ) is linearly homogenous.
(:) to be convex. If we add convexity of
to the
conditions in part (b), then (as we discussed in section 2.4) we obtain multiple-prior preferences
which, of course, are a special case of variational preferences.
A special case of invariant biseparable preferences is the Choquet expected utility (CEU)
model. The variational preference model can accommodate CEU provided the associated capacity
is convex, in which case the preferences are convex and the model reduces to a special case
of multiple priors. Chatteauneuf and Tallon (2002) study a larger set of CEU preferences which
need not be convex but which still have the nice property that the capacity has a non-empty core.
They show a CEU preference relation satis es A.5 (weak uncertainty aversion) if and only if the
core is non-empty.
Proposition 14 (CEU) (a) Suppose that preferences % admit a CEU representation (U; ) (where
U is unbounded). Then these preferences admit a mean-dispersion representation if and only if the
34
core of the capacity
'( ; ) =
is non-empty. The corresponding representation ('; ; U; ) has
R
, and (d) :=
(d) d .
2 core ( ),
(b)Suppose that the preferences % admit the monotone mean-dispersion representation ('; ; U; ).
Then the preferences have a non-empty-core CEU representation (with associated utility index U )
if and only if they exhibit CAAA (hence ' ( ; ) =
and the dispersion function
( d + (1
) d0 ) =
for all
2 R and all
2
H 0 );
( ) has the property that: if d,d0 2 H 0 are comonotonic then
(d) + (1
) (d0 ).
Notice that proposition 14(a) does not require
to be convex. If we add convexity of
to the
conditions in part (a), then we obtain a special case of multiple-prior preferences.
For an example of propositions 13 and 14, consider Hurwicz's (1951) -MEU model.
Example 4 (Hurwicz
-MEU) Suppose jSj = n > 2. Consider the preferences de ned by
V (f ) =
max U (f (s)) + (1
s2S
) min U (f (s))
s2S
where U be an unbounded a ne utility function.
If
> 0 then these preferences are not convex. Nevertheless, we show in appendix B that if
1=n then these preferences have a mean-dispersion representation.
Although there are interesting examples of preferences that are not convex, we may nevertheless be interested in conditions such that mean-dispersion preferences are convex. Convexity
restricts the functions
and '. Recall from theorem 2 that when preferences admit a quasi-linear
representation like expression (2), convexity of preference corresponds to convexity (not just quasiconvexity) of the dispersion function . These preferences are a special case of mean-dispersion
preferences, hence we know that quasi-convexity of
is not su cient for convexity of preferences.
On the other hand, we know from our discussion of uniqueness that, for given preferences %, no
cardinal restriction like convexity can be put on either
or ' individually. Hence convexity of
can not be necessary for convexity of preferences. Moreover, the restrictions placed on ' must
depend on the chosen dispersion function . The following proposition formalizes these ideas.
35
Proposition 15 (Convexity) (a) If the mean-dispersion preferences % satisfy MMR's axiom
A.5 (uncertainty aversion) then, in all mean-dispersion representations ('; ; U; ) of %, the dispersion function
is quasi-convex, and there exists a mean-dispersion representation ('; ; U; ) of
% in which ' is quasi-concave. (b) If ('; ; U; ) is a mean-dispersion representation of % in which
' is quasi-concave and
is convex then the preferences % satisfy MMR's axiom A.5 (uncertainty
aversion).
4.3
Full Separability.
The general mean-dispersion representation of theorem 4 is just weakly separable in the mean and
di erences from the mean. The primal representation of variational preferences of theorem 2 are
not only additively separable but also (quasi-)linear in the mean. A natural question then is what
property of underlying preferences would yield a representation in between; that is, additively
separable but not quasi-linear. The following axiom strengthens A.2 but is still weaker than
MMR's A.2. It induces a property in the preferences over state utilities that is analogous to
Wakker's (1989) consistent trade-o s property.
A.2
Consistent Mean-Dispersion Trade-o s. For any acts f; f 0 ; g; and g 0 in F, any constant
acts x; x0 ; y; y 0 in X and any
f + (1
f 0 + (1
f 0 + (1
in (0; 1): if f; f 0 ; g; and g 0 share a common mean then
9
>
0
>
) x % g + (1
)x ; >
>
>
>
=
0
0
) y % g + (1
) y0 .
) x - g + (1
) x ; > ) f + (1
>
>
>
>
;
) y % g 0 + (1
) y0 ; >
(6)
The following lemma shows this new axiom is weaker than axiom A.2 .
Lemma 16 Given A.1 (weak order), if preferences satisfy axiom A.2
then they satisfy axiom
A.2 .
To see the relationship between MMR's axiom A.2 and the new axiom A,2 , it is easier to
consider their implications for the induced preferences over state-utility vectors. Thus, x a utility
function U and let u0 :=
U
f + (1
) U (x), u
~0 :=
36
U
f 0 + (1
) U (x), u00 :=
U
g+
) U (x0 ), and u
~00 := U
(1
where
0
:= (1
) [U (y)
g 0 + (1
) U (x0 ). Then axiom A.2 is equivalent to:
9
>
>
0
00
>
u %u u ;
>
>
>
=
0
00
) u0 + 0 %u u00 + 00
u
~ -u u
~ ;
>
>
>
>
>
;
u
~0 + 0 %u u
~00 + 00 ; >
U (x)] and
00
) [U (y 0 )
:= (1
(7)
U (x0 )].
Recall that axiom A.2 is equivalent to translation invariance in the induced preferences. Given
translation invariance, the second and third preference on the left of expression (7) imply
00
0
. Therefore, given translation invariance, the right side of expression (7) follows from the rst
preference on the left. Thus MMR's axiom A.2 implies that expression (7) holds for an arbitrary
choice of the vectors u0 ; u00 ; u
~0 and u
~00 . Axiom A.2
is weaker in that it requires the utility vectors
u0 and u
~0 and the utility vectors u00 and u
~00 to come from acts that have a common mean.
If we replace axiom A.2 with axiom A.2
then we obtain the following representation result.
Theorem 17 (Separability) Suppose that preferences on F that satisfy A.1 (weak order), A.2
(consistent mean-dispersion trade-o s) , A.3 (continuity), A4 (indi erence substitution), A5
(weak uncertainty aversion), A.6 (strong unboundedness), and A.7 (weak certainty-monotonicity).
Then there exist an unbounded a ne utility function U : X ! R, a vector of weights 2 Rn such
P
that s = 1, a continuous function : H 0 ! R+ with (0) = 0, and a continuous increasing
function
: R ! R, such that the preferences are represented by
1
V (f ) =
where
2 R is the `mean' given by
by d := U
f
:=
(U
[ ( )
(d)] ;
f ), and d 2 H 0 is the vector of `di erences' given
e.
This representation is an increasing transformation of a function that is separable in the mean
and the dispersion measure . The increasing transformation is just a normalization to ease
the comparison with the representation in theorem 4: it sets V (f ) = U (xf ). As with theorem
4, converses to Theorem 17 can be obtained by adding weak smoothness and convex equal mean
sets.
37
4.4
Probabilistic Sophistication
In this section, we consider conditions such that mean-dispersion preferences are (second-order)
probabilistically sophisticated. It is natural when discussing probabilistic sophistication to consider in nite states. Thus, for this section, we will allow the state space S to be in nite. Let
a sigma algebra of S, and let F now be the set of simple (i.e., nite valued)
be
-measurable acts;
that is, for any f in F, the set fx 2 X : 9s 2 S, s.t f (s) = xg is nite. We will abuse notation
throughout the section. Formally, however, let B0 ( ) denote the set of real-valued,
-measurable,
simple functions. Thus, xing an act f , for any utility function u, U (f ) is a element of B0 ( ).
P
For any probability measure , the mean utility of the act f is given by y2X U (y) f 1 (y) .
And the associated utility di erence function d is an element of B0 ( ) given by d (s) = U (f (s))
. Abusing notation, the domain of the dispersion function
H 0 := d 2 B0 ( ) :
Given a probability measure
P
d
t2R
on the events in
1
will be
(t) t = 0 .
, each Anscombe-Aumann act f is mapped to
the two-stage lottery that assigns rst-stage probability
f
1
(x) to each second-stage lottery
x in X. Preferences are second-order probabilistically sophisticated if they can be described by
the ordering they induce on these two-stage lotteries. Formally:
De nition 13 (Second-Order Probabilistic Sophistication) We say that the preferences %
are second-order probabilistically sophisticated (SOPS) with respect to
for all x 2 X implies f
if
f
1
(x) =
g
1
(x)
g:
The following theorem gives conditions for mean-dispersion preferences ('; ; U; ) to be secondorder probabilistically sophisticated with respect to .
Theorem 18 (Probabilistic Sophistication I) Consider the mean dispersion preferences ('; ; U; )
where
and only if
0. These preferences are second-order probabilistically sophisticated with respect to
if
has the property that for any pair of utility di erences from the mean d and d0
(fs 2 S : d (s)
tg) =
(fs 2 S : d0 (s)
38
tg) for all t 2 R ) (d) = (d0 )
(8)
The restriction on
in expression (8) is analogous to the restriction in MMR's theorem 14
that their `cost function' c is re-arrangement invariant. In words, condition (8) says that if
two di erences-from-the-mean-functions d and d0 induce the same probability distribution over
di erences with respect to
then their dispersions
(d) and
(d0 ) are the same. Unlike MMR,
we have no condition involving stochastic dominance since our preferences need not be monotone.
They also need not be convex.
A more subtle issue is whether mean-dispersion preferences being second-order probabilistically
sophisticated with respect to some
implies that they have a mean-dispersion representation that
involves that same . In general, this is an open question but we know the answer for the case of
CAAA preferences and the case of weak smooth preferences.
Theorem 19 (Probabilistic Sophistication II) Let % be mean-dispersion preferences that satisfy either CAAA (and hence MMR's axiom A.2) or weak smoothness at all constant acts. If
is
convex valued (or uniform if S is nite) then the following are equivalent
(a) The preferences are probabilistically sophisticated with respect to
(b) The preferences admit a mean-dispersion representation ('; ; U; ) where
has the property
given in expression (8).
4.5
Aversion to Variation.
Since Schmeidler, it has become standard to identify convexity of preferences with uncertainty
aversion or aversion to variation across states. In our general mean-dispersion model, an agent's
attitude toward such variation is captured by properties of the function (:) and the interaction of
with the mean (that is, by the function '). Ergin & Gul (2007) discuss other notions of aversion
to variation in the context of second-order probabilistic sophistication. In this section, we relate
these ideas.
In each of the cases discussed in section 4.2 that satisfy weak uncertainty aversion, axiom A.5
but not the standard uncertainty aversion of axiom A.5, the dispersion function
indeed it was not even quasi-convex. Nevertheless, quasi-convexity of
39
was not convex;
is a natural property to
investigate. It says that the dispersion index reduced by hedging. Most classical measures of
dispersion are quasi-convex.
An agent with mean-dispersion preferences for whom
aversion subject to holding the mean utility
('; ; U; ),
is quasi-convex exhibits uncertainty
xed. That is, for mean dispersion preferences
is quasi-convex if and only if the following property holds.
De nition 14 (Common-Mean Uncertainty Aversion) For any pair of acts f; g in F with
a common mean with respect to
and any
in (0; 1), if f
g then
f + (1
) g % f.
There are at least two intuitive reasons why an agent might be common-mean uncertainty
averse but might nevertheless not be uncertainty averse in the usual sense of having convex preferences. First, loosely speaking, one could imagine an agent whose ambiguity aversion decreases
as we increase mean utility at an increasing rate. Thus, she could be indi erent between a utility
vector uL with a low mean and low dispersion and a second utility vector uH with a high mean
and very high dispersion, but strictly prefer these to a utility vector that is half way between. At
this medium mean utility level, the medium dispersion level might still require a large premium.
The preferences described in example 2 are an extreme example of this. Recall, these meandispersion preferences were not fully separable in
and , and exhibited decreasing ambiguity
aversion. They were illustrated in gure 7. The indi erence sets for the induced preferences %u
0
are Leontief in half-space below the line H(1=2;1=2)
, and are kinked `multiple prior' type indi erence
curves in the northeast quadrant (i.e. for any u in R2+ ). The dispersion index for these preferences
is quasi-convex (in fact, it is convex), thus they satisfy common-mean uncertainty aversion. But
these preferences are not convex. The reason is that the agent becomes less ambiguity averse as the
mean utility
when
increases. In the example, this reduction in ambiguity aversion occurs `suddenly'
= 0, but the kinks are not essential: a smooth approximation of these preferences would
still not be convex. Convexity, by ruling out this kind of example, is saying more than that the
agent is averse to variation across states: it is saying something about how that aversion changes
as we change mean utility.
A second possible reason is an agent for whom, loosely speaking, the `marginal disutility' of
40
increasing dispersion decreases as dispersion increases. An example of such an agent is given
below:
Example 5 (Ergin & Gul (2007)) Consider the monotone mean dispersion preferences ('; ; U; )
P
where
0, is the mean absolute error s s jdj and ' =
(log (1 + )) =4.
As before, this
is quasi-convex (in fact it is convex). But Ergin & Gul (2007) show that these
preferences are not convex.18 . The reason is that the agent has decreasing marginal disutility
of dispersion (re ected in the log). Convexity, by ruling out this kind of example, is again saying
more than that the agent is averse to variation across states: it is saying something about how
that aversion changes as we increase the variation. Notice that we could rewrite the representation
with ^ = (log (1 + )) =4 and '
^=
^. Thus these preferences satisfy translation invariance and
hence CAAA. In this case, the new dispersion function ^ is quasi-convex but it not convex, hence
these are not variational preferences (see theorem 2).
Ergin & Gul (2007) introduced the example above to make a di erent distinction. Their main
interest is in preferences that are second-order probabilistically sophisticated. Following Ergin
and Gul, let
be the two-stage lottery generated by
f
and f . Ergin and Gul show that if
is convex-valued,19 then an agent who is SOPS with respect to
is averse to mean-preserving
spreads in the ( rst stage of the) induced two-stage lotteries if and only if
De nition 15 (Second-Order Risk Aversion) For any pair of acts f; g in F and any
(0; 1), if
f
=
g
then
f + (1
in
) g % f.
Ergin and Gul also introduced a weaker condition for preferences that are SOPS with respect
to . We say that an act is degenerate in the second stage if, for each state s, the lottery f (s) is
degenerate. Ergin and Gul's condition captures the idea that an agent would prefer to bet on the
(objective) events that de ne the lotteries in X than on the (subjective) events in S.
18
They also show the preferences are monotone. Ergin & Gul work with Savage acts. The discussion here adapts
their concepts to an Anscombe-Aumann setting.
19 A measure
(D) =
(B).
is convex-valued if for any event B, and any
41
2 (0; 1), there exists an event D
B, s.t.
De nition 16 (Issue Preference) For any acts f; g in F and constant act x in X, if g is
P
P
degenerate in the second stage, and x = y2X
f 1 (y) y = y2X
g 1 (y) y then x % f % g.
Returning to mean-dispersion preferences, a very weak property that we might require of the
(d) for all d 2 H 0 and all k > 1. This
dispersion function is that it be ray monotonic: if (kd)
property just says that as we increase statewise di erences from the mean by scalar multiplication
(holding the mean xed) then the agent is weakly worse o . All classical measures of dispersion
satisfy this property. The property is not required by mean-dispersion preferences { in particular,
it is not an implication of our weak uncertainty aversion axiom A.5 { but it is satis ed by every
example in this paper including those in which
is not convex.
An agent with mean-dispersion preferences for whom
towards a constant act (holding mean utility
('; ; U; ),
is ray monotonic prefers to move
xed). That is, for mean dispersion preferences
is ray monotonic if and only if the following property holds.
De nition 17 (Common-Mean Monotonicity) For any pair of act f in F, any constant act
x in X that is a mean of f with respect to , and any
in (0; 1),
f + (1
) x % f.
Clearly, common-mean uncertainty aversion implies common mean monotonicity. The more
interesting question is how these connect with Ergin-Gul's conditions in the case of mean-dispersion
preferences that are also second-order probabilistically sophisticated.
Theorem 20 (Variation Aversions) Suppose that the (monotone) mean-dispertion preferences
% de ned by ('; ; U; ) are SOPS with respect to , suppose that
is convex valued, and suppose
that the nal outcome set is rich in that for all lotteries x 2 X there exists a degenerate lottery that
is indi erent to x. Then uncertainty aversion (A.5) implies common-mean uncertainty aversion
which implies second-order risk aversion which implies issue preference which implies commonmean monotonicity.
Thus the two notions of aversion to `variation around a common mean' that seem natural
in the context of mean-dispersion preferences bound the two notions of aversion to `variation in
rst-stage lotteries' that seem natural in the context of second-order probabilistic sophistication.
42
Appendix A: Proofs
Proof of the translation invariance lemma (lemma 1). To see that translation invariance
implies weak certainty independence (in state-utility space), x acts f and g in F, constant acts
x and y in X and
Hence U
U
in (0; 1). Set
)U
) (U
y (s)
U
x (s)) and notice that
[ U
f + (1
)U
y]
[ U
f + (1
)U
x]
=
[ U
g + (1
)U
y]
[ U
g + (1
)U
x]
=
e.
)U
x %u U
f + (1
g + (1
:= (1
g + (1
)U
x if and only if U
f + (1
)U
y %u
y.
To see that weak certainty independence implies origin translation invariance, let u0 % u00 . We
need to show that u0 + e %u u00 + e. Recall that x0 is the constant act such that U
f + (1
)U
x0 = u0 and g be given by
Fix
2 (0; 1) and let f be given by
(1
) U x0 = u00 . The existence of the acts f and g is guaranteed by unboundedness. Let y be
the constant act, u y = e= (1
U
x0 = 0.
U
g+
). Again, the existence of such a constant act is guaranteed by
unboundedness. By weak certainty independence,
U
But U
f + (1
)U
f + (1
y% U
)U
y=u0 + e and similarly, U
g + (1
)U
g + (1
)U
y.
y=u00 + e.
Proof of the primal representation theorem (theorem 2). The necessity part of the proof
is almost immediate. For translation invariance, notice that any
added to each state utility is
absorbed into the rst `mean' term of the representation, leaving the displacements una ected.
The following lemma is adapted from the social choice literature
Lemma 21 Fix %u de ned on Rn . If %u satis es order, continuity, monotonicity and translation
invariance then for any
n
2 [0; 1] , such that
e = 1, there exists a representation of %u of the
form
W (u0 ) =
u0
(u0
43
(
u0 ) e) .
: H 0 ! R.
where
Proof. Following Mas-Colell, Whinston and Green (1995, p..834), de ne W (u0 ) by u0
u
W (u0 ) e. By standard arguments, given continuity and monotonicity this is well de ned. We need
to show that W (u0 )
u0 depends only on the vector of di erences u0
u0
(
u0 ) e = u00
u00
(
u00 ) e then, by translation invariance,
u00 = u0 + (
u00 ) e then W (u0 )
(
u00
u0 ) e
u
u0 = W (u00 )
W (u0 ) e + (
and therefore, W (u00 ) = W (u0 ) + (
u00
u00
u0 ) e. That is, if
(
u00 . But if u0
u0 ) e = [W (u0 ) + (
u0 ) e =
(
u00
u0 )] e
u0 ), as required.
The gap between this lemma and theorem 2 are that
is arbitrary in the lemma, and
does
not have all the desired properties stated in the proposition. By convexity and monotonicity, there
exists a
n
2 [0; 1] such that H 0 is a supporting hyperplane of the upper contour set de ned by the
preferences %u through 0. Using this
in (0; 1) such that
( d0 + (1
Let
0
and
and d0 = u0
00
be such that
0
is non-negative.
is convex. Suppose not. Then there exists two di erence vectors d0
It remains to show that
and d00 in H 0 and a
in lemma 21, ensures that (0) = 0 and
0
) d00 ) >
(d0 ) =
00
(d0 ) + (1
) (d00 ) .
(d00 ). Let u0 be the utility vector such that
e. Similarly, let u00 be the utility vector such that
00
=
0
u00 and d00 = u00
=
u0
00
e.
By lemma 21, W (u0 ) = W (u00 ).and
W ( u0 + (1
) u00 )
[
0
+ (1
)
00
]
< [
0
+ (1
)
00
]
=
=
W (u0 ) + (1
( u0 + (1
[
) u00 )
(d0 ) + (1
) (d00 )]
) W (u00 ) ;
which contradicts convexity of the preferences %u .
Proof of the proposition relating axiom A.2 and CAAA (proposition 3). Preferences
exhibit constant absolute ambiguity aversion (CAAA) if, for any act f in F, any pair of constant
acts x and y, and any
2 (0; 1),
f + (1
) x % x ) f + (1
44
) y % x + (1
) y.
To show that MMR's axiom A.2 implies CAAA, let g := x in the statement of A.2. The we get
) x % x + (1
f + (1
) y % x + (1
) x ) f + (1
)y
which is just a restatement of the display above. MMR show that axiom A.2 implies the HersteinMilnor form of independence over constant acts, which (given their order and continuity axioms)
is equivalent.
The proof that CAAA together with independence over constant acts implies MMR's A.2 is
similar to that of Lemma ONE. But we include the details for completeness. Fix an expected
utility representation u of the preferences over constant acts, and consider the induced preferences
%u over state-utility vectors. In this setting, CARA is equivalent to: for all u0 2 Rn and all
2 (0; 1),
)
We
u0 + (1
) e %u e
u0 + (1
)
0
e %u
e + (1
)
0
e, for all ;
0
2R
rst show that this one directional implication implies a two directional implication. Let
:= (1
)
0
. Then, rewriting the previous display, we get
)
u0 + (1
) e %u e
u0 + (1
) e + e %u e + e, for all
2R
Notice that we can write the left side
u0 + (1
[u0 + e] + (1
) e+ e=
) [ e + e]
Thus we have from the original property (substituting [u0 + e] for u0 and [ + ] for :
)
[u0 + e] + (1
) [ e + e] %u [ e + e]
[u0 + e] + (1
)
00
So, choosing the ^ to solve (1
h 00
) ^
[u0 + e] + (1
)
[u0 + e] + (1
)
u0 + (1
00
e %u
[ e + e] + (1
i
( + ) =
)
00
e, for all
, we can rewrite the last display as
) [ e + e] %u [ e + e]
) [ e + e]
) e %u e
45
00
e %u [ e + e]
e
Summarizing the argument so far, we have shown that the CAAA implies, for all u0 2 Rn and all
2 (0; 1),
,
u0 + (1
) e %u e
u0 + (1
) e + e %u
e + e, for all
2R
We next show that we can replace weak preference by indi erence. Suppose that
but
u0 + (1
) e
u0 + (1
) e+ e
e
u
e + e, for some
u
Then, from the rst line (by monotonicity), we have
,
[u0
"e] + (1
) e
[u0
"e] + (1
) e+ e
u
e
u
e + e,
for all " > 0, where the last implication uses the contra-positive. Now taking " ! 0 and applying
continuity to the second line we have
) e + e -u e + e,
[u0 ] + (1
a contradiction.
Hence, we have shown that CAAA implies for all u0 2 Rn and all
,
u0 + (1
) e
u0 + (1
) e+ e
e
u
e + e, for all
u
By transitivity this implies: for all u0 ; u00 2 Rn and all
,
u0 + (1
) e
u0 + (1
) e+ e
u
u00 + (1
u
) e
u00 + (1
u0 + (1
) e %u u00 + (1
u0 + (1
) e + e %u u00 + (1
46
2 Rn
2 (0; 1),
And by continuity, this implies:for all u0 ; u00 2 Rn and all
,
2 (0; 1),
) e + e, for all
2 Rn
2 (0; 1),
) e
) e + e, for all
2 Rn .
Now x two acts f and g in F, two constant acts x and y in X and an
setting u0 = u (f ), u00 := (g),
:= u (x), and
:= (1
) (u (y)
in (0; 1). Then,
u (x)) in the last display implies
that preferences satisfy axiom A.2.
Lemma 22 Given A.1 (weak order) and A.3 (continuity), the uncertainty aversion axioms A.5
and A.50 are equivalent.
Proof of lemma 22. It is clear that A.50 implies A.5. We show the converse by induction
on m. Assume A.5 holds. When m = 2, the two axioms are identical. Suppose A.50 holds for
m
k. Consider m = k + 1 and consider the convex combination a1 f1 + : : : + ak fk + ak+1 fk+1 .
Let g :=
1 f1
+ ::: +
fk+1 . If (1
k+1 ) g
there exists a
2 (0;
indi erent acts (1
k fk
+
where
k+1 fk+1
k+1 )
j
=
j = (1
k+1 ).
By the induction hypothesis, g % f1
% fk+1 , then we are done. Suppose not. Then by continuity
such that (1
) g + fk+1
) g + fk+1 and fk+1 implies that all
fk+1 . But then, applying A.5 to the two
) g + fk+1 % fk+1 :
> , the act (1
a contradiction.
Proof of the main theorem (theorem 4). In the following, we assume A.1 (weak order)
and A.3 (continuity) are given. We rst show that every act has a certainty equivalent.
De nition 18 For all acts f in F, we say that a constant act xf in X is a certainty equivalent
of f if xf
f.
Lemma 23 (Certainty Equivalents) Given A.6 (strong unboundedness), all acts f in F have
certainty equivalents.
Proof. To see this, let f = g in the statement of the axiom. Thus, z + (1
(1
) f for all
get z
f
)f
f
w+
2 (0; 1). Taking a sequence of 's converging to 1 and applying continuity, we
w. Applying continuity again, ensures that there exists some
constant act z + (1
)w
2 [0; 1] such that the
f.
We next nd an a ne utility representation for the preferences restricted to constant acts.
47
Lemma 24 (Expected Utility on Constant Acts) Given either A.2 (weak common-mean
certainty independence) or A.7 (weak certainty monotonicity), the restriction of preferences to
constant acts admits an expected utility representation. That is, there exists an a ne utility
function u : X ! R such that, for all x; y in X, u (x)
u (y) if and only if x % y.
Proof. We rst show the result using axiom A.2 . The proof follows MMR (pp.1477-8) except
that we need to show that A.2 (which replaces their stronger A.2) is su cient. To bridge this
gap, we rst show that each constant act is a mean of itself (and hence has a mean). To see this,
for the constant act x, set g := x and m (x) := x and choose
arbitrarily in (0; 1] in the de nition
of a mean of the act x. Then parts (i) and (ii) of the de nition follow trivially.
Next, we show that if two constant acts are indi erent then they have a common mean. To
see this, let the constant acts x and y be such that x
y, and set m (x) := y and g := x in the
de nition of a mean of the act x. Again parts (i) and (ii) of the de nition follow trivially. Hence
y 2 M (x) \ M (y).
To proceed, let the constant acts x and y be such that x
y. Since x and y have a common
mean, we can apply axiom A.2 . Following MMR, suppose there exists a constant act z such that
1
2x
+ 12 z
1
2y
+ 12 z, say, without loss of generality, 12 x + 12 z
replace z with x to obtain x
1
2y
1
2y
+ 12 z. By axiom A.2 , we can
+ 21 x and we can replace z with y to obtain
1
2x
+ 12 y
y, a
contradiction. Then the hypothesis of Hernstein and Milnor's (1953) mixture space theorem are
satis ed.
Next we show the result using axiom A.7 .To show this, choose x
there exists a constant act z such that 21 x + 12 z
x to obtain x
1
2y
1
2y
y, and (as above) suppose
+ 12 z. By axiom A.7 , we can replace z with
+ 12 x and we can replace z with y to obtain
1
2x
+ 21 y
y, a contradiction.
Once again, the hypothesis of Hernstein and Milnor's (1953) mixture space theorem are satis ed.
The following follows from Kopylov (2007).
Lemma 25 (Unboundedness [Kopylov]) Assume either A.2 or A.7 . If the preferences satisfy A.6 (unboundedness) then U (X) = ( 1; +1).
48
Recall the following de nition from section 2:
De nition 2 (Induced Preferences). Let %u be the binary relation on Rn de ned by u0 %u u00
if there exists a corresponding pair of acts f 0 and f 00 in F with U f 0 = u0 and U f 00 = u00 , such
that f 0 % f 00 .
Lemma 26 (State-Utility Preferences) Assume either A.2 or A.7 . Let U (:) be an a ne
representation of % on X. Given A.6 (unboundedness) and A.4 (indi erence substitution), the
binary relation %u inherits order and continuity. In particular, u0 %u u00 if and only if for all acts
f 0 and f 00 in F such that U
f 0 = u0 and U
f 00 = u00 , we have f 0 % f 00 .
Proof. Completeness follows from unboundedness via lemma 25. That is, for any u0 in Rn ,
there exists an act f in F with U
then f (s)
f = u0 . For any pair of acts f and g in F, if U
g(s) for all s. Hence, by indi erence substitution, f
only if f % g. Similarly, U f
U g if and only if f
f =U
g
g. Hence U f %u U g if and
g and U f
U g if and only if f
u
g.
Hence transitivity and continuity are inherited by %u .
The next lemma establishes that %u exhibits monotonicity with respect to constant increases
in utility across all states.
Lemma 27 (Certainty Monotonicity) Assume A.4 , A.6 and either A.2 or A.7 . Let U (:)
be an a ne representation of % on X. Given A.7 (weak certainty monotonicity), for any stateutility vector u0 in RS and any constant vector u in RS++ , u0 + u
Proof. Fix an
u
u0 .
in (0; 1). By unboundedness, there exists an act f in F for which U f = u0 = ,
and there exist constant acts x and y for which U (x) = 0 and U (y) = u= (1
By the a nity of U (:) it follows that U ( x + (1
) x) = 0 > u = U ( x + (1
), respectively.
) y) and so
x + (1
)y
x + (1
) x. Hence by weak certainty monotonicity (Axiom A.7 ) we have
f + (1
)y
f + (1
) x and thus U
u0 + u
u
( f + (1
) y)
u
U
( f + (1
) x), that is,
u0 , as required.
Lemma 28 Assume A.4 and either A.2 or A.7 . Let U (:) be an a ne representation of % on
X. For any nite set of indi erent acts f1 ; : : : ; fm in F (that is, f1
49
fj for all j = 2; : : : ; m) if
for the convex combination a1 f1 + : : : + am fm , the state-utility vector U
(a1 f1 + : : : + am fm ) 2
RS is a constant vector, then there exists a corresponding set of acts f^1 ; : : : ; f^m in in F with
U
f^j = U
fj for all j = 1; : : : ; m, (and hence, by the a nity of U , U
(a1 f1 + : : : + am fm ) =
a1 f^1 + : : : + am f^m ), such that a1 f^1 + : : : + am f^m is a constant act.
U
Proof. Let u = U
(a1 f1 + : : : + am fm ). By lemma 25 (unboundedness) we can nd two
lotteries z and z such that z
f^j (s) =
fj
s z
fj
s
+ 1
z for all s in S and all j = 1; : : : ; m. De ne f^j by
fj (s)
fj (s). By the indi erence substitution axiom A.4 , f^j
z
fj for
each j. Furthermore, by independence of % restricted to constant acts, [a1 f1 + : : : + am fm ] (s)
h
i
a1 f^1 + : : : + am f^m (s) for all s in S. Hence, U (a1 f1 + : : : + am fm ) = U a1 f^1 + : : : + am f^m =
i
h
u. But by construction, for each s in S, a1 f^1 (s) + : : : + am f^m (s) = 1 fs1 + : : : + m fsm z +
h
i
f1
fm
1
+
:
:
:
+
1
z. Hence
1
m
s
s
=
U
h
h
f1
1 s
f1
1 s
+ ::: +
+ ::: +
m
fm
m s
i
z+
i
h
fm
U (z) +
s
h
1
1
1
1
f1
s
f1
s
+ ::: +
+ ::: +
for every s in S. But since U (z) > U (z), there is a unique
(1
) U (z). Hence,
z + (1
f1
1 s
+ ::: +
fm
m s
=
1
m
m
1
fm
s
fm
s
i
i
z
U (z) = u,
in [0; 1], satisfying, u = U (z) +
for all s in S. Thus a1 f^1 + : : : + am f^m =
) z, is a constant act as required.
For any state utility vector u0 , let U (u0 ) = fu00 2 Rn : u00 %u u0 g be the (weak) upper contour
set of u0 with respect to the induced preference relation %u . Our axioms do not imply that these
upper contour sets are convex, hence utility vectors need not lie in supporting hyperplanes of
their upper contour sets. The next lemma shows, however, that all constant utility vectors lie on
supporting hyperplanes of their upper contour sets.
Lemma 29 (Supporting Hyperplane for Constant Acts) Assume A.4 and either A.2 or
A.7 apply. Let U (:) be an a ne representation of % on X. Given A.5 , for all constant acts
x in X, the constant vector U
U (U
x lies in a supporting hyperplane of its weak upper contour set
x).
Proof. Suppose not. Consider the convex hull of the upper contour set of U
does not lie in a supporting hyperplane of the upper contour set, U
50
x. Since U
x
x must lie in the interior of
this convex hull. Therefore, there exists a constant act y
also lies in the convex hull. By de nition, U
x such that the utility vector U
y
y is not in the upper contour set. Using a mild
extension of Caratheodory's Theorem (see Rockafellar (1970, p.155)), we claim that there exist
n + 1 points on the boundary of the upper contour set (i.e., points indi erent to U
U
x) such that
y is a convex combination of these points.
By Caratheodory's Theorem, we know that any u0 in the convex hull of a set S
Rn can be
expressed as a convex combination of at most n + 1 points in the set. Suppose (as in our case)
the set S is closed and the point u0 is not the set itself. Let k + 1
n + 1 be the number of
distinct points in S are used to construct u0 as a convex combination each with positive weight.
That is, u0 =
1 u1
+ ::: +
k uk
+
k+1 uk+1 .
Without loss of generality, we will show that we
can choose another point u
^k+1 on the boundary of S such that the convex combination ^ 1 u1 + : : :
+ ^ k uk + ^ k+1 u
^k+1 = u0 . Let u00 :=
(1
k+1 ) u
00
+
k+1 uk+1
1 u1 +: : :+ k uk
where
j
=
j = (1
By construction,
= u0 : Suppose uk+1 was not on the boundary of S. Since S is closed and
u0 2
= S, there must exist a
2(
of S. Set ^ k+1 :=
and, for each j = 1; : : : ; k, set ^ j :=
construction (1
k+1 ).
k+1 =
k+1 ; 1)
such that u
^k+1 := (1
) u00 + uk+1 lies on the boundary
j
(1
^ k+1 ) = (1
k+1 ).
By
^ k+1 ) u00 + ^ k+1 u
^k+1 = u0 : And ^ 1 u1 + : : : + ^ k uk + ^ k+1 u
^k+1 = u0 . Repeating
this step k + 1 times completes the argument.
Since u y can be expressed as a convex combination of a nite number of points indi erent
to u
x, by lemma 28, there exist a nite number of acts indi erent to x such that a convex
combination of those indi erent acts yields a constant act indi erent to y
x. But this contradicts
A.5 , weak uncertainty aversion.
An immediate implication of lemma 29 is that, for any constant act x, there exists a hyperplane
through U
x such that U
x % u0 for all utility vectors u0 in the hyperplane. Thus the constant
act x (as well as any other constant act indi erent to x) is a mean for all acts f such that U
f
lies in this hyperplane.
Lemma 30 (Common-Mean Translation Invariance) Assume A.4 , A.6 and A.7 apply.
Fix a constant act x0 in X and let U (:) be an a ne representation of % on X for which U (x0 ) = 0.
Suppose x0 is a mean for all acts f that such that U f lies in the hyperplane through 0 with normal
51
e = 1. Let H 0 be this hyperplane. Given A.2 (weak common-mean certainty
vector , where
independence), for all u0 , u00 in H 0 and all
Proof. By de nition
u0 =
2 R, u0 %u u00 if and only if u0 + e %u u00 + e.
u00 = 0. Fix an
in (0; 1). By unboundedness, there exist acts f
and g in F for which U f = u0 = and U g = u00 = , respectively, and there exists a constant act y in
X for which U (y) = = (1
). By construction, both U f and U g lie in H 0 , hence x0 is a mean
for both f and g. Also by construction: U
( f + (1
) y) = u0 + e, U ( g + (1
U ( f + (1
( g + (1
) x0 ) = u00 ,
) y) = u00 + e. Hence by indi erence substitution
(Axiom A.4 ) we have u0 %u u00 if and only if f + (1
u00 + e if and only if f +(1
) x0 ) = u0 , U
) y % g+(1
) x0 % g + (1
) x0 and u0 + e %u
) y. Thus, applying weak common-mean certainty
independence, u0 %u u00 if and only if u0 + e %u u00 + e.
Lemma 31 (Mean Existence) Given A.2 , A.4 , A.5 ,A.6 and A.7 , there exists a vector
2 Rn ,
e = 1 such that for all f 2 F, any constant act x such that U (x) =
(U
f ) is
a mean of f . (The set of such means is independent of the choice of a ne utility representation
P
U (:)). In particular, if is a probability vector, then the constant act s s f (s) is a mean of f .
Proof. Fix a constant act x0 in X and let U (:) be an a ne representation of % on X for
2 Rn ,
which U (x0 ) = 0. By lemma 29, there exists a
hyperplane of U (0). Fix an f and let
:=
e = 1, be such that H 0 is a supporting
f ). Set u0 := 0; u00 := U
(U
Thus u0 and u00 lie in H 0 . Applying lemma 30, we obtain e %u U
acts f such that U
probability vector
f 2 H , any constant act such that U (x) =
P
(U f ) = U ( s s f (s)).
f
e, and
= .
f . Since this applies for all
is a mean of f . When
is a
Let U (:) be an a ne representation of % on X for which U (x0 ) = 0. By lemma 23, we know for
all acts f in F, there exists a constant act x (f )
f . Let V (f ) := U (x (f )) be our representation
for % on F. The corresponding representation for the induced preferences %u over state utilities
is W (u0 ) := U (x (f )) for all f such that U
f = u0 . By lemma 26, it is enough to show that we
can write this representation in the form W (u0 ) = ' ( ; (d)) where the scalar
vector d := u0
e, and where the functions ' and
By lemma 29, there exists a
2 Rn such that
52
:=
u0 and the
have the properties stated in Theorem 4.
e = 1 such that H 0 is a supporting hyperplane
for the upper contour set U (0) through the constant vector 0. That is, the constant vector 0 is a
mean for all state-utility vectors in H 0 . And, by lemma 31, for all
in R, the constant vector e
is a mean for all state-utility vectors in H . By a change of basis, we can express any state-utility
vector u0 in Rn as ( ; d) 2 R
^ ( ; d) := W (u0 ) where
W
=
H0 where
u0 and d = u0
=
u0 and d = u0
H0 , set
e. For all ( ; d) 2 R
e. (Since the change of basis is a bijection, this
is well de ned.) By common-mean translation invariance (lemma 30), the induced preferences in
this new basis are weakly separable; that is, for all ;
^ ( 0 ; d)
if and only if W
0
^ ( ; d)
2 R and d; d0 2 H0 , W
^ ( ; d0 )
W
^ ( 0 ; d0 ). Hence we can proceed to construct our weakly separable
W
representation following the argument of Debreu (1960, p.22) or Gorman (1968, p.178-9).
De ne
: H0 ! R by setting
(d) :=
^ (0; d). [In this construction, the dispersion
W
associated with a utility vector u0 is `value' of the utility vector u0
of the projection of u0 onto H 0 .] By construction
for the upper contour set U (0), we have
Let
(d)
(d) =
0
u0 ) e; that is, the value
(0) = 0. Since H 0 is a supporting hyperplane
0 for all d in H 0 .
^ ( ; d) for all
H 0 ! R by setting ' ( ; 0 ) := W
H 0 be the range of . De ne ' : R
d in H 0 such that
(
. This is well de ned since for all d; d0 in H 0 such that
(d) = (d0 ),
^ (0; d) = W
^ (0; d). And thus, by common mean translation
by the de nition of , we have W
^ ( ; d) = W
^ ( ; d) for all
invariance (lemma 30) we have W
in R.
The function ' is decreasing in it's second argument ( ) by construction, and is increasing in
its rst argument ( ) by certainty monotonicity (lemma 27).
Proof of NiAAA proposition (proposition 5). To see that (b) and (c) are equivalent,
recall from theorem 4 that ' ( ; 0) = . Hence the ambiguity premium becomes
' ( ; ), and
the equivalence is immediate. To show the equivalence of (a) and (b), rst consider the following
lemma.
Lemma 32 Suppose that preferences % satisfy A.1 (weak order), A.3 (continuity) and A.7 (weak
certainty monotonicity). Then the preferences exhibit NiAAA if and only if: for any act f 0 in F,
any pair of constant acts x0 and y 0 , such that y 0 % x0 , and any
f 0 + (1
) x0
x0 ) f 0 + (1
53
2 (0; 1),
) y 0 % x0 + (1
) y0 .
(9)
Proof. That NiAAA implies this condition is immediate. To go the other way, suppose that
the alternative condition (expression (9)) holds, but, contra-hypothesis, there exists an act f in
F , a pair of constant acts x and y, such that y % x, and an
f + (1
)x
x but f + (1
Let z ( ) to be the constant act de ned by
)y
x + (1
2 (0; 1),
x + (1
) y for
) y.
in [0; 1]. Since z (0) = y and
z (1) = x, the contra-hypothesis becomes:
f + (1
) z (1)
z (1) but f + (1
) z (0)
z( ).
By our monotonicity axiom A.7 , preference over the constant acts z ( ) is decreasing in
and
preference over the acts f + (1
) z (0)
f+
)y
x+
(1
) z ( ) is also decreasing in . Hence f + (1
) z ( ) and by transitivity,
f + (1
)z( )
z( )
Then, by continuity and monotonicity, there must exist a ^ >
)z ^
f + (1
and hence f + (1
(1
) y % z ^ + (1
such that
z ^
) y, by expression (9). But z ^ + (1
) y, hence we obtain a contradiction.
Recall that xf is the certainty equivalent of f . Thus, in expression (9), we can set x
x0 , and choose a constant act x
)y 0
f +(1
f 0 +(1
)y 0
% x
f 0 +(1
)x0
:=
) y 0 . Rewriting, NiAAA becomes: for any
f + (1
f 0 in F, any pair of constant acts x0 and y 0 , such that y 0 % x0 , and any
x
f 0 +(1
)x0
2 (0; 1),
) y0 .
+ (1
(10)
To show (b) implies (a), x an act f 0 in F, a pair of constant acts x0 and y 0 , such that y 0 % x0 ,
and a
2 (0; 1) such that
and let
(1
:= (u0
f 0 + (1
) x0
x0 . Let u0 := u
). Thus, ' (u0 ; ) = u (x0 ). Let
) U (y 0 ) = U (x0 ) + . Let u00 := U f 0 + (1
u00 =
+
and
(u00
:= (1
f 0 + (1
) [U (y 0 )
f 0 +(1
)y 0
U (x0 ) + (1
54
:=
u0
U (x0 )] hence U (x0 ) +
) U (y 0 ). By construction, u00 = u0 + , hence
) = . Then (b) implies
U x
) x0 . Let
) U (y 0 )
which implies expression (10), as desired.
To show (a) implies (b) x an
2 R, a
0, and a
H 0 . Fix an
2
an x0 such that U (x0 ) = ' ( ; ), and choose a y 0 % x0 such that
Choose a state utility vector u0 such that
that
u
f 0 + (1
and hence
U (x) +
) x0 = u0 . Let u00 := U
u00 =
by construction,
u0 =
+
and
u (x0 ) + (1
or ' ( + )
(u00
and
( f 0 + (1
(u0
2 (0; 1). Choose
) (U (y 0 )
= (1
U (x0 )).
) = . Choose an act f 0 such
) y 0 ). By construction, u00 = u0 + ,
) = . By construction, x
f 0 +(1
)x0
= x0 . And
) U (y 0 ) = U (x0 ) + . Therefore, expression (10) implies u00
' ( ; ) + , as desired.
Proof of the partial-converse theorem (theorem 7). Fix the mean-dispersion representation ('; ; U; ). It is easy to check that the representation implies that axioms A.1, A.3, A.4 ,
A.6 and A.7 hold. For A.5 , notice that since
that for all
(0) = 0 and
2 R and state-utility vectors u0 2 Rn , if u0
u
0, the representation implies
e then
a convex combination of utility vectors that are indi erent to e, then
u0
. Hence, if
0
0
e is
. Given lemma 26
and the fact that ' is increasing in , this implies axiom A.5 .
For A.2 restricted to acts that share a common mean with respect to , x two acts f and
g in F , an
2 (0; 1), and two constant acts x and y in X. Let u0 := U
u00 = U g + (1
) U (x). Let
and u00 +
g + (1
u0 =
= U
:= (1
) [U (y)
e and d00 := u00
if and only if u0 %u u00 if and only if ' ( ; (d0 ))
(1
) y % g + (1
) U (x) and
U (x)]. Then u0 + = U f + (1
) U (y)
) U (y). If f and g share a common mean with respect to , then
u00 =: . Let d0 := u0
and only if ' ( + ; (d0 ))
f + (1
) x % g + (1
e. Then, f + (1
' ( ; (d00 )) if and only if
' ( + ; (d00 )) if and only if u0 +
%u u00 +
(d0 )
)x
(d00 ) if
if and only if f +
) y: as desired.
Proof of the weak smooth theorem (theorem 8). We rst show that the representation plus
weak smoothness implies the axioms. From the partial converse theorem (theorem 7), we know
that (given a mean-dispersion representation), all the axioms except A.2 and A.8 apply; and that
A.2 holds for those acts that have a common mean with respect to the
in the representation.
The next lemma implies that if ('; ; U; ) are weakly smooth then the unrestricted version of
55
axioms A.2 applies.
Lemma 33 Fix the mean-dispersion preferences ('; ; U; ). These preferences are weakly smooth
at all constant acts x 2 X if and only if: for all acts f and g, if f and g have a common mean
then f and g have a common mean with respect to .
Proof. ()) Suppose that there exists a pair of acts f and g with a common mean but not a
common mean with respect to ; that is,
and g and let
(U
:= U (x). Assume that
(U
f ) 6=
(U
g). Let x be the common mean of f
f ) 6= . (This is without loss of generality since if
this is not true for f then it must be true for g.) In particular, this implies that U (f (s)) 6=
for
some s in S. Therefore, since x is a mean of f , there must exist an act g 0 such that e lies on the
interior of the line segment between U
f and U
vectors u0 in the open line segment between U
g 0 and such that e %u u0 for all state-utility
g 0 . Since
f and U
segment does not lie in the hyperplane H , therefore either
Without loss of generality, suppose
t 2 (0; 1] such that u0 := t (U
segment between U
(U
f ) + (1
f and U
(U
f) >
(U
f ) 6= , this line
or
(U
g0 ) > .
f ) > . Then, by weak smoothness, there exists a
t) e
u
e. But such a u0 is in the interior of the line
g 0 : a contradiction.
(() Fix an x and let U (x) =
. We know that H
is a supporting hyperplane at
e of
the upper contour set of the preferences over state-utility vectors %u associated with ('; ; U; ).
Consider any u0 such that
u0 > . Let u00 be a utility vector such that e lies in the interior
of the line segment between u0 and u00 . By construction, this line segment does not lie in the
hyperplane H0 , and
>
u00 . If e %u u0 for all state-utility vectors u0 in the open line segment
between u0 and u00 then x would be a common mean of f and g. But since all acts f and g that
share a common mean also share a common mean with respect to
, this contradicts
u0 >
u00 . That is, there exists a utility vector on the line segment that lies in the interior of the
upper contour set through 0. Since u00 lies below H 0 and H 0 is a supporting hyperplane of the
upper contour set at 0, no vector in the line segment between u00 and 0 can be strictly preferred to
zero. Hence there is a vector tu0 + (1
t) e on the line segment between u0 and 0 that is strictly
preferred to 0. Since our choice of x and u0 was arbitrary, we are done.
56
Combining lemma 33 with the partial converse theorem (theorem ??) implies that the unrestricted axiom A.2 holds.
To show that the preferences % satisfy A.8 (convex equal mean sets), we have to show that
for all constant acts x, the set EM (x) := ff 2 F : x 2 M (f )g is a convex set. Consider the
n
o
U (x)
U (x)
U (x)
convex set of acts U 1 H
:= f : U f 2 H
. We already know that U 1 H
EM (x) (otherwise we could not have
1
EM (x)
U
u0 := U
f2
=H
to
(since
H
U (x)
U (x)
(U
0 and
(0) = 0). Hence, it is enough to show that
. Suppose, contra-hypothesis, that there exists f 2 EM (x), such that
. Then f and x share a common mean but not a common mean with respect
f ) = U (x)). But this is ruled out by lemma 33 above.
It remains to show that the axioms imply the representation. From the main theorem (theorem
4, we already know that (given the axioms) we can nd a mean-dispersion representation. Hence,
it only remains to show that weak smoothness is implied by axiom A.8 (convex equal mean sets);
and that the
is unique. Both are implied by the following lemma.
Lemma 34 Let % be a mean-dispersion preference relation (that is, the preferences have a representation of the form in Theorem 4), and suppose that % satis es axiom A.8 (convex equal mean
for which % admits a mean-dispersion representation; (b) for
n
o
U (x)
each constant act x, the set of acts for which x is a mean is equal to f 2 F : U f 2 H
;
sets). Then (a) there is a unique
and (c) for each act f , all constant acts in M (f ) are indi erent.
Proof of Lemma 34. By the convex equal-mean sets property the set EM (x) := ff 2 F : x 2 M (f )g
is a convex set. Since U (:) is a ne, this implies that the set of utility vectors EMu (x) :=
f^
u 2 Rn : u
^=U
f for some f 2 EM (x)g is also a convex set. To see this, if u0 and u00 are both
0
in EMu (x), then there exists acts f/ and f 00 such that ff 0 ; f 00 g
u00 = U
f 00 . Fix an
de nition, U ( f 0 + (1
= u0 + (1
EM (x) and u0 = U
in (0; 1). By convexity of EM (x), f 0 + (1
) f 00 ) 2 EMu (x). But U ( f 0 + (1
f 0,
) f 00 2 EM (x). Hence by
) f 00 ) = U f 0 +(1
) U f 00
) u00 , as required.
Let x0 be a constant act for which u (x0 ) = 0. We know that: if
representation of the preferences %, then H 0
admits a mean-dispersion
EMu (x0 ) (otherwise we could not have
57
0
and
(0) = 0). Suppose, contra-hypothesis (a), that there exists some
0
6=
that also admits a
mean-dispersion representation. Then EMu (x0 ) must contain the two hyperplanes H 00 6= H 00 .
But, by the de nition of a mean, we know that 0e is the only point on the constant-utility line in
EMu (x0 ). Thus, EMu (x0 ) cannot be convex.
Suppose, contra-hypothesis (b), that there exists a constant act x 2 M (f ) such that U
H
U (x)
. But, again, we know that H
U (x)
f 2
=
EMu (x), and that U (x) e is the only point on the
constant-utility line in EMu (x). Thus again, EMu (x) cannot be convex.
Suppose, contra-hypothesis (c), there exists two constant acts x; y 2 M (f ) such that U (x) 6=
U (y). That is U
EMu (y) = H
U (y)
f 2 EMu (x) \ EMu (y). But, we know from (b) that EMu (x) = H
U (x)
and
and hence EMu (y) \ EMu (y) = ?.
An implication of lemma 34 is that, given axiom 8 , all equal mean sets are of the form
U
1
H
U (x)
for some x. That is, if f and g have an common mean then they have an common
mean with respect to
respect to
. Hence, by lemma 33 above, the preferences are weakly smooth with
for all x.
The following lemma shows that local di erentiability implies weak smoothness.
Lemma 35 Fix a mean-dispersion representation ('; ; U; ). If
di erentiable at ( ; 0) for all
is di erentiable at 0, and ' is
2 R then the preferences are weakly smooth (with respect to ) at
all constant acts x 2 X.
Proof of Lemma 35. Let W : Rn ! R be de ned by W (u0 ) := ' (
is di erentiable at 0, and ' is di erentiable at ( ; 0) for all
at e for all
2 R. Since
(0) = 0 and
hyperplane H . Therefore, for all
0, for all
2 R there exists a
u0 ; (u0
u0 )). Since
2 R, the function W is di erentiable
2 R, the vector e maximizes W on the
> 0 such that the gradient rW ( e) =
.
Suppose that there exists a pair of acts f and g with a common mean but not a common mean
with respect to ; that is,
that
(U
(U
f ) 6=
(U
g). Let x be the common mean of f and g. Assume
f ) 6= U (x). (This is without loss of generality since if this is not true for f then it
must be true for g.) In particular, this implies that U (f (s)) 6= U (x) for some s in S. Therefore,
58
since x is a mean of f , there must exist an act g 0 such that U (x) e lies on the interior of the line
segment between U
f and U
g 0 and such that U (x) e maximizes the function W on this line
segment. The rst-order necessary condition for such a maximization is:
g0
rW (U (x) e) (U
which implies that the line segment lies in H
U (x)
U
f) = 0
. But this contradicts
(U
f ) 6= U (x).
Therefore all pairs of acts with a common mean have a common mean with respect to . Given
lemma 33, this implies that the preferences are weakly smooth..
Proof of the theorem that multiple 's imply CAAA (Theorem 9.)
0
Proof. Suppose there exist a pair of weight vectors
and
0
00
and
,
0
6=
00
such that H 00
and H 000 are both supporting hyperplanes of the upper contour set of the induced preferences %u
at 0. This implies that there is a kink at 0. By the proof of the theorem 7 part (a), common mean
translation invariance applies to these preferences. It follows that, for all
2 R, both H
0
and H
00
are supporting hyperplanes of the upper contour set of the induced preferences %u at the points
e on the constant-utility line. That is, there is a similar kink everywhere on the constant-utility
line.
Step 1: Fix a utility vector u1 such that
that ce
all
0
u1 <
00
u1 . Let ce be the constant vector such
u1 . Without loss of generality, let c = 0. We will rst show that 0 + e
u
u
u1 + e for
in R.
We will construct a sequence of points u1 ; u2 ; : : : converging to 0 such that for each j, uj
and uj+1 share a mean and are indi erent. Thus, by common-mean translation invariance and
transitivity, the claim will follow.
Let
1
0
:=
u1 . If
1
= 0 then we are done since 0 and u1 would have a common mean (i.e.,
0) and we could apply common-mean translation invariance directly. In this case, de ne u2 = 0.
So suppose
1
e
u
1
> 0 (it cannot be less since H 00 is a supporting hyperplane). This means that
u1 . Consider the (two-dimensional) plane de ned by the point u1 and the constant-utility
line. Consider the line in this plane de ned by the points u1 and
plane through 0 parallel to the line de ned by u1 and
59
00
u1 e (>
0
u1 e and the line in this
0
u1 e). By construction,
1
the rst of these lines is in the hyperplane H
0
and the second is in the hyperplane H 000 Since
these lines are not parallel and lie in the same plane, let u
^1 be their intersection. By construction,
the point u
^1 lies on H 000 , hence u1 % u
^1 . By construction, the point
between u1 and u
^1 . Since
1
e
u
e lies on the line segment
u1 % u
^1 there exists a point u2 := u
^1 + (1
)
1
u1 for
e
in [0; 1). By construction, the new point u2 is indi erent to u1 and shares a mean,
some
We can construct u3 similarly but reversing the roles of
00
1
u2 <
0
u2 (=
1
). Once again, if
2
0
and
00
. By construction,
1
e.
2
:=
= 0 then we are done since 0 and u2 would have a
common mean. In this case set u3 = 0. If not,
2
2
> 0, which means that
e
u
u2 . We can
continue the argument as before to nd u3 . Notice that u3 lies in the same (two-dimensional)
plane as u1 and u2 . Notice also that u2
1
2
u2
0
= (
1
00
1
e > 0 if and only if
) u2 , for every " > 0, there exists a
1
2
> 0. In fact, since
1
> 0 such that if
2
<
then
e < ".
The construction of the means
1
2
and
, and the associated points u
^ 1 , u2 , u
^2 and u3 , is
illustrated in gure 8.
1
Consider the constructed sequence of means
;
2
; : : : and the associated sequence u1 ; u2 of
indi erent, equal-mean utility vectors (all of which lie in the same plane). By construction, 0
j+1
if
j
j+1
<
. And if
j
j+1
=
j
j
for some j then
= 0 = uj+1 and we would be done. Conversely,
for all j then the sequence must converge, say to . By construction, for every " > 0,
there exists a
> 0 such that if
j
j+1
then uj+1
<
j
e < ". Hence if the
j
sequence
converges, the uj sequence must converge to the constant-utility line. Hence by transitivity and
continuity of the preferences %u , the uj sequence is indi erent to a constant utility vector which
by certainty monotonicity, must be 0.
Step 2. For any utility vector u1 such that
0
u1 6=
00
u1 , we can use step 1 to show that
translation invariance holds for it and its certainty equivalent. Thus for any two indi erent utility
vectors that have this property, translation invariance holds. This only leaves utility vectors such
that
n
0
u
^=
00
u
^. Fix an arbitrary mean, say 0. The set of vectors
0
u
^=
00
u
^ = 0 forms an
2 dimensional linear subspace. This is the intersection of the hyperplanes H 00 and H 000 . We
already know that, for all vectors u1 in H 00 but not in H 000 , the pair of vectors consisting of u1
60
π"
u
constant-utility line
1
π'
(π"$u1)e
u3
µ2e
u^ 2
µ1e = (π'$u1)e
0
u2
u^ 1
Figure 8: Illustration of construction of of the means
u
^2 and u3 .
1
and
2
, and the associated points u
^ 1 , u2 ,
and its certainty equivalent satisfy translation invariance. Since our choice of mean was arbitrary,
if we can show the same property for all vectors in H 00 \ H 000 then we would be done.
Thus, choose a u
^ in H 00 \ H 000 . Let c^e
u
^. Choose a sequence u1 ; u2 : : : converging to u
^
such that uj 2 H 00 nH 000 for all j. Choose c1 ; c2 ; : : : such that cj e
the sequence cj e converges to c^e. Fix a
uj for all j. By construction,
2 R. By step 1, uj + e
cj e + e for all j. Since
the sequence uj + e converges to u
^ + e, and the sequence cj e + e converges to c^e + e, by
continuity, we have u
^+ e
c^e + e.
Proof of the proposition about weak ambiguity aversion (proposition 12). Let the SEU
preference relation %SEU be that represented by the utility function U and the prior . By the
partial converse theorem, theorem 7, we know that the mean dispersion preferences ('; ; U; )
satisfy all the axioms of the main theorem except A.2 and that they satisfy weak certainty
independence for all acts that have a common mean with respect to . Hence by lemmas 29 and
61
31, we know that, for any constant act x, the hyperplane H
uppercontour set U (U
u(x)
is a supporting hyperplane of the
x). Thus, let the SEU Let the SEU preference relation %SEU be that
represented by the utility function U and the prior . By construction, the uppercontour set at
U
x in state utility space induced by %SEU is H
u(x)
. Since this holds for any constant act, the
conclusion follows.
Proof of invariant biseparable preferences proposition (proposition 13). (a) From proposition 12, we know that ambiguity aversion is a necessary condition for preferences to have a
mean-dispersion representation. The Ghirardato et al (2002, p141) axioms 1{5 imply all the axioms of our main representation result, theorem 4 except A.5 . So it is enough to show that
ambiguity aversion implies A.5 . Fix a collection of indi erent acts f1 ; : : : ; fm and let x be the
constant act such that some convex combination of the indi erent acts a1 f1 + : : : + am fm = x.
We need to show that x % f1 . Let xf1 be a certainty equivalent of f1 . Let U be an a ne utility
index associated with the invariant biseparable preferences, and let u0 = U xf1 . Let (U; ) de ne
an SEU preference relation %SEU with respect to which the invariant biseparable preferences are
ambiguity averse. By ambiguity aversion, fj %SEU x for j = 1; ; : : : ; n. That is, for each j, the
utility vector U
0
fj lies above the hyperplane H u that is the induced indi erence set of %SEU
0
through U xf1 . Therefore, the convex combination U x lies above H u . Hence by monotonicity,
x % xf1
f1 .
(b) By the proof of theorem 2, the monotone mean-dispersion preferences ('; ; U; ) where
'( ; ) =
satisfy all the MMR axioms except convexity and hence satisfy all the Ghirardato
et al (2002) axioms except Axiom 2 (certainty independence). Thus, it only remains to show
that the linear homogeneity of
W (u0 ) :=
of
u0
implies certainty independence. Let W : Rn ! R de ned by
u0 ) represent the induced preferences %u . Then linear homogeneity
(u0
is equivalent to the following property: for all acts f in F and constant acts x in X; if
u (x) =
U
f (that is, if x is a mean of f with respect to ) then W (U
W (U
f )+(1
) W (U (x)) for all
for all u0 2 Rn and
[ f + (1
) x]) =
in (0; 1). Clearly, W also satis es W (u0 + ) = W (u0 )+
> 0. But Chambers & Quiggin (2004, result 1, p.100) show that this
combination implies W (U
[ f + (1
) y]) = W (U
62
f ) + (1
) U (y) for all constant acts y
and all
in (0; 1). It follows that: if f % g then f + (1
) y % g + (1
) y; that is, certainty
independence.
Conversely, invariant biseparable preferences are translation invariant hence ' ( ; ) must take
. If W represents the preferences %u on state-utility vectors induced by invariant
the form
biseparable preferences then W (U
[ f + (1
) y]) = W (U
and constant acts x. Hence linear homogeneity of
f ) + (1
) U (y) for all acts f
is necessary.
Proof of CEU proposition (proposition 14). (a) Chateauneuf and Tallon (2002, Theorem
5) show a CEU preference relation satis es A.5 if and only if core associated with the CEU
representation is non-empty. The other axioms needed for our main representation result, theorem
4 follow from Schmeidler's (1989) axiomatization of CEU. Since CEU preferences are translation
invariant, we know that ' ( ; ) must take the form
.
A Choquet expected utility representation is given by the Choquet integral of the induced
state-utility vector with respect to a capacity , which is a function that assigns to each event a
number in [0; 1]. The capacity is normalized (that is,
respect to set-inclusion (that is, A
B implies
(?) = 0 and (S) = 1) and monotonic with
(A)
(B).) Formally, the Choquet integral of
a state-utility vector u0 with respect to the capacity , is de ned as:
Z
0
u d :=
Z
0
(1
(fs 2 S :
1
u0s
ug)) du +
Z
1
0
(fs 2 S : u0s
ug) du.
As is well known, if two state-utility vectors u0 u00 are comonotonic, (that is, for any pair of states
s and s^, (u0s
u0s^) (u00s
u00s^ )
0), then
Z
(u0 + u00 ) d =
Z
u0 d +
Z
u00 d .
Since any constant utility vector e is comonotonic with respect to any other state-utility vector,
it follows that for any vector probability vector p, that
W CC (u0 )
=
=
=
Z
Z
u0 d
(u0
(p u0 ) e+ (p u0 ) e) d
Z
(p u0 ) + (u0 (p u0 ) e) d .
63
By assumption, the core of the capacity is non-empty. Formally, the core C associated with
the (convex) capacity
is given by
n
X
X
n
C = p 2 [0; 1] :
ps = 1 &
s
s2A
ps
(A) for all A
R
2 C it follows from the above, that W CC (u0 ) =
Hence, for any
S
u0 d =
o
+
R
(d) d , where
as usual, we take =
u0 and d = u0
e. The corresponding dispersion function is given by:
R
(d) =
(d) d . Notice (0) = 0, by construction. To see that for all d 2 H 0 we have (d) 0,
notice that
(d)
=
=
Z
Z
Z
since
(fs 2 S : ds
Z
(d) d
0
(1
1
0
1
1
ug)
X
0
1
1
(fs 2 S : ds
P
X
s^
s^,
Z
1
(fs 2 S : v (s)
0
f^
s2S:ds^ u
^g
f^
s2S:ds^ u
^g
f^
s2S:ds^ ug
ug)) du +
s^
du +
Z
X
1
0
f^
s2S:ds^ u
^g
ug) du
s^
du,
for all u 2 R. Finally, integration by parts yields
du +
Z
1
0
X
f^
s2S:ds^ ug
s^
du =
X
s
s ds
= 0.
(b) Schmeidler (1989) shows that a preference relation admits a CEU representation if and
only if the induced preferences over state-utility vectors, %u can be represented by a function
W : Rn ! R satisfying monotonicity, translation invariance and the property that: for any
pair of comonotonic state-utility vectors u0 and u00 and any
W (u0 ) + (1
00
) u00 ) =
) W (u00 ). Translation invariance is equivalent to ' taking the quasi-linear form
. For the third property, notice that two state-utility vectors u0 =
' =
u00 =
in [0; 1], W ( u0 + (1
0
e + d0 and
e + d00 are comonotonic if and only if their dispersions d0 , d00 in H 0 are comonotonic. And,
since W (u0 ) =
u0
(d0 ),
W ( u0 + (1
,
( d0 + (1
) u00 ) = W (u0 ) + (1
) d00 ) =
64
(d0 ) + (1
) W (u00 )
) (d00 ) :
Proof of the convexity proposition (proposition 15). Part (a). Fix a representation
('; ; U; ) of %. Since the preferences % satisfy A.5, the induced preferences %u over state-utility
(:) represents these preferences on the hyperplane H 0 ,
vectors are convex. Since the function
it is immediate that
^ :R
Let W
(:) must be quasi-convex.
^ ( ; d) = ' ( ; (d)) for all ( ; d) in R
H 0 ! R be de ned by W
denote the associated induced preferences over vectors of the form ( ; d) in R
^
%W
^ is convex and that W is quasi-concave. Since
H 0 , and let %W
^
H 0 . We know that
(:) is quasi-convex, it is also ray monotonic.
0
But convexity of %W
^ implies a slightly stronger property: If for some d 2 H and some k > 1,
(kd) >
(d), then
(k 0 d) >
(kd), for all k 0 > k. To see this, suppose to the contrary, there
exists some d 2 H 0 and some k 0 > k > 1, such that
R, we have ( ; d)
u
that (
( ; kd)
c; d)
^
W
( ; kd)
u
( ; k 0 d). Consider the weight
^
W
ing in its
(
c; kd)
(
c; d) + (1
) k0 = k )
=
) ( ; k 0 d) = (
rst argument (the mean) implies ( ; kd)
^
W
(kd) >
(d). Then, for all
in
( ; k 0 d). By monotonicity and continuity, there exists c > 0, such
+ (1
By construction,
(k 0 d) =
k0
k0
satisfying
k
2 (0; 1)
1
c; kd). The fact that ' (:; :) is increas^
W
(
c; kd). But convexity implies
( ; kd): a contradiction.
This property of
allows us to construct an alternative representation (^
'; ^; U; ) of % in which
'
^ is quasi-concave by slightly strengthening an argument by Blackorby et al (1978, pp.63-4). If
f0g =
H 0 then quasi-concavity of ' reduces to quasi-concavity in the rst argument and is an
immediate consequence of monotonicity. Therefore assume that f0g ( H 0 .
n
o
Choose a d^ such that d^ = 1 and
k d^ : k 0 = H 0 . For all d in H 0 let k (d) solve
n
o
n
o
(d) =
k (d) d^ . Let k^ = sup k :
k d^ = 0 . For any k 0, set ^ k d^ := max 0; k k^ .
And for all d in H 0 set ^ (d) := ^ k (d) d^ . In words, we have identi ed each d with the point on
the ray de ned by d^ to which it is indi erent, and then constructed ^ k (d) d^ (loosely speaking)
to be the distance up this ray to that point minus the distance over which
= 0. Clearly, ^
represents the same preferences on H 0 as does ; and has the two required properties that it be
continuous and have ^ (0) = 0.
^ ( ; d). We want to show that '
Now de ne '
^ : R ^ H 0 by '
^ ( ; ^ (d)) := W
^ is quasi-concave.
65
Thus consider two points ( 0 ; y 00 ) ; (
00
^ H 0 such that ( 0 ; y 0 ) %W
^ (
; y 00 ) in R
00
; y 00 ). Let k 0 :=
^ By construction, ^ k 0 d^ = y 0 , and ^ k 00 d^ = y 00 .
y 0 + k^ and let k 00 := y 00 + k.
Thus, '
^
0
; ^ k 0 d^
00
'
^
; ^ k 00 d^
^
and hence W
0
; k 0 d^
^
W
00
; k 00 d^ . Invoking the
^ , yields
quasi-concavity of W
^
W
for all
0
+ (1
+ (1
)
)
00
) k 00 ) d^
; ( k 0 + (1
^
W
00
; k 00 d^
in (0; 1) hence
'
^
But ^ ( k 0 + (1
0
00
) k 00 ) d^ = y 0 + (1
'
^(
0
) k 00 ) d^
; ^ ( k 0 + (1
+ (1
)
00
'
^
; ^ k 00 d^
:
) y 00 , hence
00
; y 0 + (1
) y 00 )
00
'
^(
; y 00 ) :
Since our choice of points was arbitrary, this shows that the function '
^ is quasi-concave.
Part (b) Let ('; ; U; ) be a mean-dispersion representation of % in which ' is quasi-concave
and
^ :R
is convex. As above, let W
^ ( ; d) = ' ( ; (d)) for all ( ; d)
H 0 ! R be de ned by W
in R
H 0 , and let %W
^ denote the associated induced preferences over vectors of the form ( ; d)
in R
^ is quasi-concave. But for all
H 0 . It is enough to show that W
^ (
W
+ (1
)
0
; d + (1
) d0 )
in (0; 1),
= '(
+ (1
)
0
; ( d + (1
'(
+ (1
)
0
;
) d0 ))
) (d0 ))
(d) + (1
^ ( 0 ; d0 )
' ( 0 ; (d0 )) = W
where the rst inequality is by the convexity of
and the fact that ' is decreasing in its second
^ is indeed quasi-concave.
argument, and the second inequality is by quasi-concavity of '. Thus W
Proof of Lemma 16. Fix any three common-mean acts f ,g and g 0 and an
in (0; 1). In the
de nition of consistent mean-dispersion trade-o s, set f 0 := g 0 , x = x0 , and y = y 0 . Then the
second and third line on the left side of A.2
f + (1
) x % g + (1
hold trivially, and we are left with:
) x ) f + (1
66
) y % g + (1
) y,
which is a statement of axiom A.2.
Proof of the separability theorem (theorem 17). By Lemma 16, the conditions of theorem
^ :R
and de ne W
4 are met. Thus, construct a utility function U and choose a weight function
H 0 ! R as in the proof of theorem 4; that is, for all ( ; d) 2 R
e. Consider the induced preferences %W
^ on R
u0 and d = u0
=
^ ( ; d) := W (u0 ) where
H 0 , set W
We claim that axiom A.2
implies
( ; d ) %W
^ (
0
0
^.
H 0 represented by W
0
00
00
;d );
9
>
>
>
>
>
>
=
0 0
~ 00 ; d00
^
; d~00 ; > ) ~ ; d %W
>
>
>
>
;
~ 00 ; d~00 ; >
; d~0 -W
^
00
~ 0 ; d~0 %W
^
(11)
To see this, choose two constant acts x and x0 and a utility level
(1
) U (x) and
U
f; U
(U
g
f 0; U
00
=
+ (1
(U
) U (x) =
0
g0
; d~0 ,
(U
e) = d0 ,
f
e) = d~00 . By construction, U
U
) U (x0 ) = (
g + (1
00
f 0 + (1
U
00
= (1
) [U (y 0 )
U (x0 )]. By construction,
; d00 ), U
) U (y) = ~ 0 ; d~0 , U
U
0
=
+
f + (1
~ 00 ; d~00 . Then, by lemma 26, expression (6) in the de nition of axiom A2
e) = d~0 ,
f0
) U (x) = ( 0 ; d0 ),
g 0 + (1
= (1
) U (y 0 ) = ~ 00 ; d00 , U
g + (1
(U
f + (1
; d~00 . Next choose two constant acts y and y 0 such that ~ 0
and ~ 00
0
) U (x0 ). Then choose four acts f; f 0 ; g; and g 0 such that
g 0 2 H , and such that
g; and U
e) = d00 , and
f 0 + (1
U
00
such that
) U (x0 ) =
) [U (y)
U (x)]
) U (y) = ~ 0 ; d0 ,
g 0 + (1
) U (y 0 ) =
implies expression
(11).
But expression (11) is exactly Wakker's (1989) generalized triple cancellation condition (see
his Lemma III.6.4, p 70) for the preference relation %W
^ de ned on R
H 0 . Hence the existence
of a continuous additive representation follows from his Theorem III.6.5, (see p.70).
Proof of theorem 18 (probabilistic sophistication I) To see that the condition given in
expression (8) is su cient, suppose that
f
f
1
(x) =
g
1
(x) for all x 2 X. We need to show
g. But since the probability distributions over utilities induced by
the same, their mean utilities with respect to
and U from f and g are
are the same, and the probability distribution of
di erences from the mean are the same. Hence by expression (8), the the dispersion measures will
67
be the same. Hence they are indi erent.
To see that the condition given in expression (8) is necessary, rst recall that we can always
normalize ' and
so that for each d in H 0 , (d) :=
W (d) where W (d) e
u
d. Next consider
two state-utility functions d and d0 in H 0 with the property given on the left side of expression (8).
That is, these two state utility functions induce the same distribution over utilities with respect
to , hence by probabilistic sophistication, they must indi erent. Since d and d0 both have mean
0, it follows that
(d) = (d0 ).
Proof of theorem 19 (probabilistic sophistication II) The proof of (b))(a) is the same
as for theorem 18. For (a))(b), we rst need to show that 0 %u u0 for all state-utility functions
u0 in the set H 0 ; loosely speaking this is the analog of saying that H 0 is a `supporting hyperplane'
at 0.
Suppose not. Then there exists a state-utility function u
~ in H 0 such that u
~
u
0. Since
is
nonatomic (or uniform) we can approximate u
~ by another state-utility function u0 measurable with
respect to some N -element partition fE1 ; : : : EN g such that
and such that u0
u
(Ej ) = 1=N for all j = 1; : : : ; N ,
0. We can think of any state utility function that is measurable with respect
to this partition as an N -dimensional vector of \event-utilities". Abusing notation, let u0 also
refer to its corresponding vector. By (a), the vector u0 is indi erent to all its permutations (since
each induces the same distribution of utilities according to ), and hence each such permutation
u
~0 is strictly preferred to 0. Since the distribution on the N element partition is uniform, each
of these permutation vectors u
~0 lie in H 0 . Hence the convex hull of these permutation vectors
includes 0. Since there exists a mean-dispersion representation of the preferences, there must exist
a ^ such that 0 %u u00 for all u00 in H ^0 . (This follows from the fact that, in all mean dispersion
representations, ' is weakly decreasing in
and
0). Thus, for each of the permutation vectors
P
1
u
~0 their expectation with respect to ^ is greater than 0; that is, t2R
[~
u0 ] (t) t > 0 for all u
~0
which is a permutation of u0 . But this contradicts 0 lying in the convex hull of the permutation
vectors.
Now suppose that CAAA holds. Abusing notation, let e denote the constant state-utility
68
function that yields 1 in every state. Since the preferences have a mean-dispersion representation,
there exists a corresponding representation W of the induced preferences %u satisfying W (u0 ) e
u
u0 for all state-utility functions u0 . Since translation invariance applies, we can construct the
function analogously to the proof of theorem 4. For all state-utility functions d0 in H 0 , let
(d0 ) :=
W (d0 ). For all
d0 + e where d0 := (u0
2 R, and each state-utility functions u0 in H , we can write u0 as
e) : By the construction of , we know that d0
by translation invariance, u0
u
(
(d0 )) e. Hence W (u0 ) =
u
(d0 ) e and hence,
(d0 ) as desired.
Next consider the case where weak smoothness holds. We know that H 0 is the analog of a
supporting hyperplane of the induced preferences %u at 0. More precisely, for any N -element
partition fE1 ; : : : EN g for all j = 1; : : : ; N , the set of state-utility functions that are measurable
with respect to the partition can be thought of as N -dimensional vectors. The set of such vectors
that lie in H 0 form a hyperplane in RN . From the argument above, we know that this hyperplane supports the induced preferences on such N -dimensional utility vectors at 0. For any such
partition, this hyperplane has normal vector ( (E1 ) : : : ; (EN )).
We know that the preferences support a mean-dispersion representation. Let ^ be part of that
representation. We claim that ^ =
almost everywhere. Suppose not. Then, we can nd an
N -element partition fE1 ; : : : EN g such that ( (E1 ) : : : ; (EN )) 6= (^ (E1 ) : : : ; ^ (EN )). Since ^
forms part of a mean-dispersion representation, the set of state-utility vectors that lie in H ^0 form
a supporting of the induced preferences on such N -dimensional state-utility vectors at 0. But
since these two hyperplanes of RN are di erent and since they intersect at 0, there must be a kink
in the induced preferences at 0; a contradiction of weak smoothness.
Proof of theorem 20 (Variation Aversions) It is immediate that uncertainty aversion
implies common-mean uncertainty aversion. Example 5 illustrates that the converse is false. Ergin
& Gul (2007) show that second-order risk aversion implies issue preference but not the converse.
To see that common-mean uncertainty aversion implies second-order risk aversion, notice that
if an agent is SOPS with respect to , then
f
=
g
implies f
g. Moreover, if two acts f and
g induce the same two-stage lottery with respect to then they have the same `mean' constant
P
P
f 1 (y) y = y2X
g 1 (y) y. Since these are meanact; i.e., the constant act x := y2X
69
dispersion preferences with respect to , we know that x is a mean for f and g. Therefore if f
and g satisfy the conditions of second-order risk aversion they also satisfy those for common-mean
uncertainty aversion.
To see that issue preference implies common-mean monotonicity,
x f and (using the fact
that the outcome space is rich) construct an act f^ that is degenerate in each second stage and
that induces the same utility vector as f . By our our substitution axiom A.4 , f^
f . Let
P
x = y2X
f^ 1 (y) y be the mean constant act of f^ with respect to (which, by construction
is also a mean of f ). Then (again by our substitution axiom A.4 ), f^+(1
)x
f +(1
) x.
The former is not degenerate in the second stage so by issue preference it is preferred to f^. Hence
we have shown that for any f with mean x, f + (1
) x % f.
Appendix B: Details of the Examples
Multiple-Priors Given a particular multiple-prior preference relation with dual representation
W M P (u0 ) = minp2D p u0 ,where D is a convex, compact set of probability vectors over S, we can
nd a corresponding primal representation as follows. First x a
by
:=
u0 and the di erences are given by d := u0
2 D. The mean is thus given
e. Then the corresponding dispersion
function is given by:
(d) = maxp2D p ( d)
Notice
(0) = 0, and for all d 2 H 0 we have
( d)
0, since
d = 0 by construction.
Straightforward calculation yields
(d)
=
u0
=
u0 + minp2D p u0
To see that if the dispersion function
maxp2D p ( u0 + (
u0 ) e)
u0 = W M P (u0 ) .
(:) is linearly homogenous and convex then the pref-
erences have a multiple-prior representation, let W : Rn ! R de ned by W (u0 ) :=
(u0
u0 ) represent the induced preferences %u . Then linear homogeneity of
is equivalent
to the following property: for all acts f in F and constant acts x in X; if u (x) =
70
u0
U
f
(that is, if x is a mean of f with respect to
) then W (U
[ f + (1
)] x) =
in (0; 1). Clearly, W also satis es W (u0 + ) = W (u0 ) +
W (U
f) +
for all u0 2 Rn
(1
) U (x) for all
and
> 0. But Chambers & Quiggin (2004, result 1, p.100) show that this combination implies
that W (U
and all
[ f + (1
) y]) = W (U
f ) + (1
) U (y) for all acts f and all constant acts y
in (0; 1) (indeed, any two of these properties imply the third). Since
is convex, W is
quasi-convex. But Safra & Segal (1998) and Chambers & Quiggin (1998) show these properties
imply that preferences have a multiple-prior representation.
Multiplier Preferences. MMR (2006b) show that we can write Hansen-Sargent preferences as
i
hP
u0s
0
ln
s . Where us := U (f (s)). To convert this into the form of expression (2),
s exp
add and subtract
u0 to the right hand side, to obtain,
:=
ln
X
ds
exp
s
.
s
(12)
Notice that by Jensen's inequality,
(d) := ln
X
s
ds
exp
ln exp
s
d
= 0,
and (0) = 0. Hence (5) constitutes a quasi-linear mean-dispersion representation of the multiplier
preferences.
Example 3 (Extreme Mean-Standard Deviation Preferences). To see that the preferences
violate local monotonicity around certainty, notice that
=
=
=
=
q
q
q
p
2
1 d1
1
2
2 d2
+
(u1
2
2 u2 )
1 u1
2
2
1 2
(u1
u2 ) +
1 2
ju1
u2 j .
+
2
2 1
(u2
2
(u2
1 u1
2
2 u2 )
2
u1 )
Hence we can rewrite the representation of the preferences over state-utility vectors as
1 u1
+
hence they are decreasing in u1 for u1
2 u2
p
1 2
ju1
u2 j
u2 , even locally around certainty.
71
(13)
By construction, these mean-standard deviation preferences admit a weighting vector
hence they show that local monotonicity is not necessary for
0,
0. But these preferences
also admit a di erent mean-dispersion representation that has a weighting vector that is not a
probability. Let ^ be given by ^ 1 :=
and ^ 2 :=
1
2
+
where
The new representation over state-utility vectors is given by ^
:=
p
1 2.
Thus, ^ 1 < 0.
^, where ^ := ^ u and the
dispersion function given by
^ d^1 ; d^2 :=
8
>
>
<
if d^1
0
>
>
: 2
d^2
d^1
d^2
.
if d^1 < d^2
To see this, notice that expression (13) can be written as ^ 1 u1 + ^ 2 u2 when u1
d^1
d^2 ); and as ^ 1 u1 + ^ 2 u2
Example 4 (Hurwicz
2 (u2
u2 (i.e., when
u1 ) when u1 < u2 (i.e., when d^1 < d^2 ).
-MEU Preferences). Consider the CEU preferences characterized by
U and the `Hurwicz capacity'
given by
8
>
>
>
0 if E = ?
>
>
>
<
(E) =
if E 2
= f?; Sg , where
>
>
>
>
>
>
: 1 if E = S
is not convex since for any pair of distinct states s0 and s00 , we have
This capacity
(fs00 g) = 2 >
=
H
0
(u )
=
Z
=
=
=
P
s2S
(fs0 g) +
(fs0 ; s00 g). Straightforward calculation yields
W
where,
1=n.
u0s =n and d = u0
u0 d =
+
+
max us + (1
s2S
max ds + (1
s2S
Z
) min us
s2S
) min ds
s2S
(d) d ;
e. It remains to show that the Choquet integral of
the d with respect to the Hurwicz capacity
is non-positive. To see this, consider the uniform
probability vector, ^ = (1=n; : : : ; 1=n). Since
1=n, the vector ^ is an element of the core
P
C associated with since for any A
S, s2A ^ s = jAj =n
(A). Hence we have, for every
72
d 2 H ^0 ,
0=^ d
n 1
1
max ds +
min ds
n s2S
n s2S
max ds + (1
s2S
) min ds =
s2S
Z
(d) d .
References
Anscombe, F.J. and R.J. Aumann (1963): \A De nition of Subjective Probability," The
Annals of Mathematics and Statistics, 34, 199-205.
Chambers, R.G. and J. Quiggin (1998): \Risk Premiums and Bene t Measures for Generalized Expected Utility Theories," Journal of Risk and Uncertainty, 17, 121-137.
Chateauneuf, A. and J.-M. Tallon (2002): \Diversi cation, convex preferences and nonempty core in the Choquet expected utility model," Economic Theory, 19, 509-523.
Dupuis, P. and R.S. Ellis (1997): A Weak Convergence Approach to the Theory of Large
Deviations. Wiley Series in Probability and Statistics, John Wiley & Sons, New York.
Epstein, L.G (1985): \Decreasing Risk Aversion and Mean-Variance Analysis", Econometrica, 53, 945-961.
Ergin, H. and F. Gul (2004): \A Subjective Theory of Compound Lotteries," mimeo Princeton University.
Gilboa, I and D. Schmeidler (1989): \Maxmin Expected Utility with a Non-Unique Prior,"
Journal of Mathematical Economics, 18, 141-153.
Ghirardato, P. and F. Maccheroni (2002): \Ambiguity made precise: a comparative foundation," Journal of Economic Theory 102, 251-289.
Ghirardato, P., F. Maccheroni, and M. Mariancci (2004): \Di erentiating ambiguity and
ambiguity attitude," Journal of Economic Theory 118, 133-173.
Grant, S. and A. Kajii (2007): \The epsilon-Gini-contamination multiple priors model admits a linear-mean-standard-deviation utility representation," Economic Letters 95, 39-47.
Hansen, I.N. and T. Sargent (2001): \Robust Control and Model Uncertainty," American
Economic Review, 91, 60-66.
Herrnstein, I. and J. Milnor (1953): \An Axiomatic Approach to Measurable Utility," Econometrica, 21, 291-297.
Hurwicz, L. (1951): \Optimality criteria for decision making under ignorance," Discussion
Paper 370, Cowles Comission.
Klibano , P., M. Marinacci and S. Mukerji (2005): \A Smooth Model of Decision Making
under Ambiguity," Econometrica, 73, 1849-1892.
Kopylov, I. (2007): \Procedural Rationality in Multiple Priors Model," mimeo, University
of California, Irvine.
73
Maccheroni, F., M. Marinacci and A. Rustichini (2004): \Portfolio selection with monotone
mean-variance preferences."
Maccheroni, F., M. Marinacci and A. Rustichini (2006a): \Ambiguity Aversion, Robustness,
and the Variational Representation of Preferences," Econometrica, 74, 1447-1498.
Maccheroni, F., M. Marinacci and A. Rustichini (2006b): \Dynamic Variational Preferences", Journal of Economic Theory, 128, 4-44.
Mas-Colell, A., M. Whinston and J.R. Green (1995): Microeconomic Theory. Oxford University Press, Oxford.
Moulin, H. (1988): Axioms of Cooperative Decision Making. Cambridge University Press,
Cambridge.
Quiggin, J. and R.G. Chambers (1998): \Risk Premiums and Bene t Measures for Generalized Expected Utility Theories," Journal of Risk and Uncertainty 17, 121-137.
Quiggin, J. and R.G. Chambers (2004): \Invariant Risk Attitudes," Journal of Economic
Theory, 117, 96-118.
Roberts, J. (1980): \Possibility Theorems with Interpersonally Comparable Welfare Levels,"
Review of Economic Studies, 47, 409-420.
Safra, Z. and U. Segal (1998): \Constant Risk Aversion," Journal of Economic Theory, 83,
19-42.
Schmeidler, D. (1986): \Integral Representation without Additivity," Proceedings of the
American Mathematical Society, 97(2), 255-261.
Schmeidler, D. (1989): \Subjective Probability and Expected Utility without Additivity,"
Econometrica, 57, 571-587.
Siniscalchi, M. (2007): \Vector Expected Utility and Attitudes toward Variation," mimeo
Northwestern University.
Strzalecki, T. (2007): \Axiomatic Foundations of Multiplier Preferences," mimeo Northwestern University.
74
TABLE 1 — Dual Representations of Variational Preferences
Mean-Dispersion Form
MMR Dual Form
Family
W (u)
μ − ρ (d)
min p · u + c (p)
SEU
π·u
μ = π · u, ρ (d) ≡ 0
c (p) = 0 if p = π; ∞ otherwise.
Multiple Priors
min p · u
p∈D
p
μ = π · u, for some π ∈ D,
c (p) = 0 if p ∈ D; ∞ otherwise, where
ρ (d) = max p · (−d)
D is a convex & compact set of prob. distns.
p∈D
Multiplier Preferences
(Hansen-Sargent [2001])
(Monotone) Mean Variance
Mean-Standard-Deviation
P
−θ ln [ s πs exp (−us /θ)]
W (u) ≥ π · u − θσ 2
π · u − τσ
μ=π·u
P
ρ (d) = −θ ln [ s π s exp (−ds /θ)]
μ = π · u, ρ (d) =
1
2θ
μ = π · u, ρ (d) = τ
75
P
2
s π s ds
c (p) = θR (p|π) if p ¿ π, ∞ otherwise,
where θ > 0 & R (p|π) =
2
s π s ds
s
ps ln (ps /π s ).
c (p) = θ2 G (p|π) if p ¿ π, ∞ otherwise,
where θ > 0 & G (p|π) =
pP
P
P
s
([ps /π s ] − 1)2 π s .
c (p) = 0 if p ∈ Dsd ; ∞ otherwise, where
n
o
P
Dsd = p ∈ [0, 1]2 : s ps = 1, G (p|π) ≤ τ 2