1D Steady State Conduction: Fins & Bessel Functions
advertisement

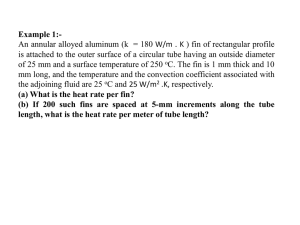
1 Chapter 2: One-dimensional Steady State Conduction 2.1 Examples of One-dimensional Conduction Example 2.1: Plate with Energy Generation and Variable Conductivity • Since k is variable it must remain inside the differentiation sign as shown in eq. (2.1) d (k dT ) + q ′′′ = 0 dx dx • This is a second order equation requiring two boundary conditions given in (c) and (d). • Direct integration of (2.1) gives the solution T(x). (2.1) Example 2.2: Radial Conduction in a Composite Cylinder with Interface Friction. • Since no heat can be conducted through the shaft, it must be at a uniform temperature. • Shaft temperature is equal to sleeve temperature at the interface r = Rs . • Temperature distribution in the sleeve is obtained by solving the heat equation • d (2.2) (r dT ) = 0 dr dr This is a second order equation requiring two boundary conditions: Specified flux at r = Rs [equation (a)] and convection at r = Ro [equation (b)]. • Direct integration of (2.2) gives the solution T(r). Example 2.3: Composite Wall with Energy Generation • For simplicity consider symmetry and analyze half the system. • Since the two plates are different and since one has energy generation, two solutions are needed; one for each plate. • The heat equation for the two plates are: d 2T1 dx 2 + d 2T2 dx 2 • q ′′′ =0 k (a) =0 (b) These equations are second order requiring two boundary conditions each. The four boundary conditions are given by equations (c)-(f). 2 • Direct integration of (a) and (b) gives the solutions T1(x) and T2(x). 2.2 Extended Surfaces: Fins 2.2.1 The Function of Fins • Fins are used to: (i) Increase the heat transfer rate from a surface at a fixed temperature, or (ii) Lower the temperature of a surface having a fixed heat transfer rate. 2.2.2 Types of Fins • Study the fins shown in Fig. 2.5. • The base is the end where the fin is attached to a surface. The tip is the opposite end. • A variable area fin is one in which the cross section varies with distance from the base. Examples are shown in Fig. 2,5 (b), (c) and (d). Is it clear why (d) is a variable area fin? 2.2.3 Heat Transfer and Temperature Distribution in Fins • Note the multi-dimensional nature of heat transfer and temperature distribution in the fin of Fig. 2.6. • Under certain conditions the temperature distribution can be assumed one-dimensional. 2.2.4 The Fin Approximation • A major mathematical simplification in the analysis of fins is the assumption that fin temperature varies with axial distance only (from base to tip). • This assumption is valid when the Biot number is small compared to unity. That is Biot number = Bi = • hδ << 1 k (2.4) δ is a measure of the lateral distance along which temperature variation is neglected. 2.2.5 The Heat Equation: Convection at Surface • Each fin has its own heat equation depending on its geometry and what takes place at its surface. • In this section we present a general formulation for fins with surface convection. • The starting point is the selection of an infinitesimal element in the direction of temperature change. In Fig. 2.7 we select an element of thickness dx. • We apply conservation of energy to the element, as in equation (a). 3 • Fourier’s law is used to described heat exchange by conduction, eq. (e). • Newton’s law is used to described heat exchange at the surface of the element by convection, eq. (f). • The resulting heat equation for this class of fins is dA q ′′′ 1 dAc dT d 2T h + − (T − T∞ ) s + =0 2 Ac ( x ) dx dx kAc ( x ) dx k dx (2.5b) • Note that Ac (x) , dAc / dx and dAs / dx are geometric quantities which are obtained once the fin geometry is specified (given). • Understanding the physical meaning of Ac (x) and As (x) is crucial. 2.2.6 Determination of dAs /dx • dAs is the surface area of the element in Fig. 2.7(b) through which heat is exchanged by convection. This area is dAs = C ( x)ds (a) • C (x ) is the circumference of the element in contact with the ambient fluid which exchanges heat with the element by convection. • From the geometry of Fig. 2.7 (b) and (c) we obtain dAs dy 2 ⎤ ⎡ = C ( x ) ⎢1 + ( s ) ⎥ dx dx ⎦ ⎣ • 1/ 2 (2.6a) In many applications the term dy s / dx is usually small compared to unity and thus can be neglected (unless it is equal to a constant). 2.2.7 Boundary Conditions • Eq. (2.5b) is second order requiring two boundary conditions. • Boundary conditions are based on what takes place physically at two locations of a fin. 2.2.8 Determination of Fin Heat Transfer Rate q f • For steady state, heat transfer from a fin can be determined by one of two methods: (1) Conduction at the base (Fourier’s law) q f = q(0) = − kAc (0) (2) Convection at the fin surface ( Newton's law) dT (0) dx (2.7) 4 q f = qs = • ∫ As h[T ( x ) − T∞ ] dAs (2.8) Note that it is easier to apply eq. (2.7) than (2.8). 2.29 Applications: constant Area Fins with Surface Convection • The heat equation for constant area fins is obtained from eq. (2.5b). • Note how eq. (2.5b) simplifies to eq. (2.10) d 2θ 2 2 −m θ =0 dx • Review the assumptions leading to this equation. • The solution to eq. (2.10) is expressed in terms of hyperbolic functions: θ ( x ) = C1 sinhmx + C2 coshmx • (2.10) (2.11b) This solution is valid for all constant area fins with surface convection. C1 and C2 are constants of integration. They depend on specific boundary conditions and change accordingly: Case (i): Specified base temperature, convection at tip. Solutions for θ (x) and q f are given by equations (2.12) and (2.13). Case (ii): Specified base temperature, insulated tip. Solutions for θ (x) and q f are given by equations (2.14) and (2.15). 2.2.10 Corrected Length Lc • A small error in fin solution is introduced if heat loss from the tip is neglected. To compensate for this approximation the fin length is increased by a small increment ΔLc . 2.2.11 Fin Efficiency η f • This dimensionless factor compares fin heat transfer rate with the maximum possible rate. Maximum fin heat transfer corresponds to a fin whose entire surface is at the base temperature. 2.2.12 Moving Fins • Example: A long wire moving through a furnace. • The heat equation for a moving fin must take into consideration the effect of fin velocity. • We consider a fin moving with constant velocity and exchanging heat by convection and radiation. The starting point is the selection of an infinitesimal element dx in the direction of temperature change (Fig. 2.11) and applying conservation of energy. 5 • Use Fourier’s law, Newton’s law and Stefan-Boltzmann radiation law to described heat exchange by conduction, convection and radiation and account for energy exchange due to fin motion The resulting heat equation for this class of fins is εσ C 4 d 2T ρ c p U dT hC 4 − − (T − T∞ ) − (T − Tsur )=0 2 k dx k Ac k Ac dx • (2.19) Review the assumptions leading to this result. 2.2.13 Applications of Moving fins Example 2.4: Moving Fin with Surface Convection • The heat equation for this fin is obtained from eq. (2.19) by neglecting radiation to obtain d 2T ρ c p U dT hC − − (T − T∞ ) = 0 k dx k Ac dx 2 • (2.19) This is a second order equation with constant coefficients. Two boundary conditions are needed. The solution based on boundary conditions (e) and (f) is ⎡ ρ c pU T ( x ) − T∞ = exp ⎢ − 2 To − T∞ k ⎣⎢ ( ρ 2c kpU ) 2 + h(W + 2t ) ⎤ ⎥x k W t ⎦⎥ (2.22) 2.2.14 Variable Area Fins • The area through which heat is conducted varies as one moves from the base towards the tip. • We formulate the heat equation for two examples of variable area fins. Both examples represent special cases of equation (2.5b). The key factor in specializing eq. (2.5b) is the determination of correct expressions for the conduction area Ac (x ) and the convection circumference C (x ) . • Case (i): The annular fin. This is a disk of constant thickness which is mounted on a tube. Eq. (2.5b) reduces to d 2T 1 dT + − ( 2h / kt )(T − T∞ ) = 0 dr 2 r dr • Case (ii): The Straight triangular fin. This is a wedge like fin. Eq. (2.5b) reduces to 1 d 2T 1 dT + − (2hL / kt ) [(1 + (t / 2 L )2 ]1 / 2 (T − T∞ ) = 0 2 x dx x dx • (2.24) (2.25) Note that equations (2.24) and (2.25) are second order with variable coefficients. Solutions to such equations are discussed in the following section. 2.3 Bessel Differential Equations and Bessel Functions 6 2.3.1 General Form of Bessel Equation • The following is a general form of a second order equation with variable coefficients x2 [ ] [ ] d2y dy + (1 − 2 A) x − 2 B x 2 + C 2 D 2 x 2C + B 2 x 2 − B (1 − 2 A) x + A 2 − C 2 n 2 y = 0 (2.26) 2 dx dx • This equation is known as Bessel equation. • Carefully study the general features of this equation (detailed on page 33). • This equation represents many special cases depending on the values of A, B, C, D and n. • Certain variable area fin equations may be special cases of this equation. • In this course the dependent variable y in this equation represents temperature. 2.3.2 Solutions: Bessel Functions • If a an equation you wish to solve is a special case of eq. (2.26), proceed as follows: (1) Rewrite your equation such that the first term of your equation is identical to that of eq. (6.26) (2) Compare, term by term, your equation with eq. (2.26) and determine the values of the constants A, B, C, D and n. (3) Depending on the values of D and n, select one of the four solutions given by equations (2.27)-(2.30) • Solutions to Bessel differential equations are expressed in terms of Bessel functions. 2.3.3. Forms of Bessel Functions • Bessel functions represent infinite power series. Equation (2.31) is a typical example. 2.3.4. Special Closed-form of Bessel Functions: n = • oddintegra l 2 Such functions are expressed in terms of familiar functions such as sin, cos, sinh and cosh. 2.3.5 Special Relations for n = 1, 2, 2, … • Note relations between certain Bessel functions. 2.3.6 Derivatives and Integrals of Bessel Functions • Equations (2.39)-(2.46) are formulas for the derivatives of Bessel functions. • Equations (2.46) and (2.47) and Appendix B give formulas for the integral of Bessel functions. 2.3.7 Tabulation and Graphical Representation of Selected Bessel Functions 7 • Recall that the focal in conduction is the determination of temperature distribution. In certain problems the solution to temperature distribution may be expressed in terms of Bessel functions. Thus it is helpful to know the general characteristics of some of these functions. • Study Table 2.1. It gives the values of six common Bessel functions when the argument of the function x = 0 and x = ∞. • Fig. 2.15 gives the general behavior of six common Bessel functions. 2.4 Equidimensional (Euler) Equation d2y dy x + a1 x + a 0 y = 0 2 dx dx 2 (2.49) • Note the distinct pattern of the coefficients: x 2 multiplies the second derivative, x multiplies the first derivative and x 0 multiplies the function y. • Although this is a second order differential equation with variable coefficient, it is not a Bessel equation. It is known as equidimensional or Euler equation. • There are three possible solutions to this equation. They are given in equations (2.51)(2.53). 2.5 Graphically Presented Solutions to Fin Heat Transfer Rate q f • Solutions to certain fins may be expressed in terms of Bessel functions. In such cases numerical determination of fin heat transfer rate requires evaluation of infinite power series. Based on such computations, graphs of fin efficiency have been constructed. Knowing fin efficiency the heat transfer rate can be easily determined. • Examples are shown in Figs. 2.16 and 2.17.