CALIFORNIA STATE UNIVERSITY, NORTHRIDGE
advertisement

CALIFORNIA STATE UNIVERSITY, NORTHRIDGE
AIM-7F
SPARROW MISSILE
,,
FREE FLIGHT ANALOG SIMULATION
A thesis submitted in partial satisfaction of the
·requirements for the degree of Master of Science in
Engineering
by
John Steven Cullumber
. January, 1977
The the.s~
o.fn·ohn Steven Cullurober. is approved:
California State University, Northridge
June, 1976
ii
TABLE OF CONTENTS
Abstract
•
•
•
•
List of Figures •
•
•
•
•
0
•
•
•
List of Symbols • • • • •
e
•
•
.
..
0
•
•
•
•
•
•
•
•
•
•
•
9
0
•
•
•
0
•
e
v
. .
vii
•
• • • • • • • • • • viii
CHAPTER 1
INTRODUCTION
1.0
Simulation •
1 .. 1
Objective
e
•
•
•
•
•
•
......... .
• • • • • • • • • •
..
•
9
$
•
•
•
•
•
•
1
2
CHAPTER 2
THE MODEL
2.0
Introduction • • • • •
•
•
•
•
•
e
,
•
•
•
~
•
2.1
Hybrid/Hardware Model
•
•
•
•
•
•
•
•
•
0
•
•
3
3
Reference Systems
Acceleration and Velocity
Euler Angles
Aerodynamic Coefficients
Motion in the Inertial Reference System
2.2
Three Degree-of-Freedom Model
• • • • •
Body-Axis Acceleration and Velocity
Euler Angles
Aerodynamic Coefficients
Motion in the Inertial Reference System
Assumptions
iii
...
13
.: . ~ 1
•. \ ': ·._ ·.
CHAJ?TER 3
IMPLEMENTATION
.. .
• • •
•.
• • •
• • •
3.0
Introduction •
.3.1
~lot
3.2
Aerodynamic Stability Derivatives
J.3
Aerodynamic Force and Moment Coefficients
3 .. 4
Body-Axis Acceleration and Velocity
e
"
or Burn Dependency
• • • • • • • "
22
• • • • •
22
• • • • • •
23
0
•
•
23
e
•
24
3.5
Euler Angle" Dynamic Pressure and Velocity • •
24
3.6
Velocity Transform and Position
24 ........ ·········-
~
• • •
......
.
CHAPTER 4
THE FUTURE
.. .
4.0
The Present
4.1
Autopilot
4.2
The Target S-eel<er
..
4.3
Aircraft Interface
e
4.,4
Validation
Appendix
'"
., • • • •
" • •
• • • •
Bibliography
• • • • • • • • • • • • • •
•
. .
• • • •
34
• • " • • • • • • • • • •
J4,
• • • • • •
•
"
.. •
. .
• • •
•
5
•
li)
iv
•
.
·•
.
• • • • • •
•
•
0
..
• •
• •
.
.
. . . . .. . ... .
• • • • • • •
•
.
34
•
•
..
•
•
•
0
•
36
36
ABSTRACT
AIM~7F
SPARROW MISSILE
FREE FLIGHT
&~ALOG
SIMULATION
by
John Steven Cullumber
Master of Science in Engineering
July, 1976
An analog simulator which deals with the free flight
of the Ail-1-7F Sparrow missile is being developed at the
Pacific Missile Test Center 1 Point Mugu, California.
'!'his machine is designed to be a "quick-look" machine
used to gather engineering data on AIN.-7F free flight.
The paper begins with a discussion of the mathematical model used to develop a hybrid/hardware simulator
which is also located at the Pacific Missile Test Center.
The six degree-of-freedom model is reduced to three
degrees-of-freedom.
The two reference systems, body-axis
and inertial, and the transform between the two systems
are discussed...
The motion of the target, and the geome-
try which describes the relative position and velocity
of the missile and target are illustrated.
v
.-
.··.:.:
Finally, future work to be done on the simulator
to allovl it's completion is described.
This includes
construction of a simplified autopilot, a simplified
target seeker, interface to the actual target seeker,
aircraft interface models, and validation of the simulator.
vi
LIST OF FIGURES
.
Figure 2-1
Body-Axis Reference System • • • •
•
5
Figure 2-2
Inertial System and Euler Angles • • •
6
Figure 2-3
Planes of Flight
Figure 2-4
Inertial Reference System
Figure 3-1
Completed Section Flow Diagram
"'
Figure 3-2
Motor Burn Dependency Diagram
Figure 3-3
Aerodynamic Stability ·Derivatives
Figure 3-4
Figure 3-5
Flow Diagram of Cx "
• • •
Flow Diagram of Cy • .. e . ..
Figure 3-6
Flow Diagram of
Figure 3-7
Velocity and Rate Diagram
Figure 3-8
.
.
" • • •
.
18
• •
19
.
25
• • • •
26
"' • •
•
0
• • • •
c
•·
• •
27
.
• • •
.
2~
*
• • • •
~9
• •
30
.
31
Euler Angle, Pressure, and Velocity
•
32
Figure 3-9
Velocity Transform and Position
.
32
Figure 3-10
Motor Burn Timing
Figure 4-1
Proportional Navigation
Figure 4-2
Simulation Block Diagram • • •
vii
Cn. "
. .
• " • • • •
.,
• • • • •
• "
.. ..
•
• • • •
33
• •
.
• • • •
35
.
37
•
• •
Definition of
b
Symbol~
Reference wing span
Reference wing chord
Aerodynamic force coefficient along the x body
axis
Aerodynamic force coefficient along the y body
axis
Cz
Aerodynamic force coefficient along the z body
axis
Zero-lift drag coefficient
Zero-lift drag coefficient at sea level
Induced drag coefficient with respect to wing
deflection
Induced drag coefficient with respect to wing
deflection and angle of attack
Lateral force stability derivative with respect
to ( )
C.~
Aerodynamic moment coefficient along the x body
axis
Aerodynamic moment coefficient along the y body
axis
Aerodynamic moment coefficient along the z body
axis
Roll moment stability derivative with respect
to ( )
Lateral moment stability derivative with
respect to ( )
Incremental drag due to skin friction
Increment of induced drag
Function of
~To'f
Acceleration due to gravity
viii
Principal moment of inertia about the ( ) body
axis
Mach
M
Hass
p
Missile Angular Rate around the x body axis
Q
Missile Angular Rate around the y body axis
R
Missile Angular Rate around the z body axis
q
Dynamic Pressure
s
Reference wins area
~
..1..
'tela
= 2 p "l't'l
b-1issile-Target position vector or range from
:missile-target
Thrust of the missile
u
Missile velocity component· on the x body axis
v
Missile velocity component on the y body axis
w
Missile velocity component on the z body axis
Velocity of the missile
Velocity of sound
Center of gravity location
Location about which aerodynamic wind tunnel
moments are referred
Center of gravity location in the glide phase
Center· of gravity at lauilch
component of range in the inertial reference
system
X
X
y
Y component of range in the inertial reference
system
z
Z component of range in the inertial reference
system
ix
Greek Symbols
o<
Angle of attack
o<w
w/u
o(.,
v/u
~
Oi.,'TOT
To.nf3::. ~Ju.
t ..,a-\-~~) J \.\,
~f
Average wing deflection of wings 2 and 4
~l
Average wing deflection of wings 1 and 3
~~
Differential wing deflection
Euler angle rotation about the X axis of the
inertial system
Euler angle rotation about the y axis of the
inertial system
Euler angle ro,tation ciliout the Z axis of the
inertial system
p
Atmospheric density
X
Chapter 1
INTRODUCTION
1.0
Simulation
The simulation of complex systems has become one of
the most important tools in engineering.
Many systems
are too complex, too expensive, or possibly too dangerous to be used in actual data gathering activities on a
large scale, and it is in these situations that the value
of a simulator is demonstrated8
Simulation has become a major factor in the develop.ment and testing of weapon systems in the Navy 1 s arsenal •.
As these weapon systems have become more complex and
expensive, the importance of simulation has grown.
At
the Pacific l-'Iissile Test Center, Point Mugu, California,
the Navy has developed simulators for some of it•s
~issile
systems.
majo~
The functions of these simulators
include preflight simulation to determine if flight test
conditions are reasonable; establishing launch windows
and launch envelopes; and post-flight analysis to determine the cause of behavior exhibited during a flight
test.
A program of current interest at the Pacific Missile
Test Center is the AIH-7F Sparrow missile.
The AIM-7
S,eries of missiles are medium range air-to-air missiles
used by theNavy and Air Force, and the AIM-7F is the
latest version in production.
1
A hybrid/hardware simulation of the AI!-t-7F and it's
flight to a target has been developed at the Pacific
Missile Test Center.
This simulation has six
degrees-of~
freedom and the ability to operate in apurely hybrid
configuration, where a mathematical model of the missile
hardware is used, or actual missile hardware can be used
in the loop.
The simulation consists of three analog
computers, one digital processor with a hybrid interface,
computer-missile interfaces, missile guidance and control
.hardware, and peripheral analog and digital devices.
1.1
Objective
The objective of this project is to construct a
simulation of the AIM-7F' free flight which is purely
analog and much less complex
t~hat
simulator but with a 90% accuracy.
the hybrid/hardware
The problems en-
countered during the launch of the missile and it's
flight near the launching aircraft will not be cemsidered.
This simulator will involve the flight of the
missile from the time it has left the area near the
launching aircraft to intercept.
Chapter 2
THE HODEL
2.0
Introduction
The first problem encountered in building any simu-
lation is that of acquiring a mathematical model which
describes the system to the required accuracy.
In this
specific application, the problem was to generate a model
which describes the aerodynamic characteristics of a
missile and it's flight to a target.
The mathematical model which was implemented in the
hybrid/hardware simulation served as the basis for the
model implemented in this simulation,
By eliminating
three degrees-of-freedom and a few other capabilities of
the hybrid/hardware simulator, an appropriate model
evolved.
The following sections \vill present the basic model
used in the hybrid/hardware simulator and illustrate the
reduction of that model to the model implemented in this
project.
2.1
Hybrid/Hardware Model
Re.ference
System~
The hybrid/hardware simulation utilizes two reference systems.
These two systems are a body-axis refer-
ence system and an inertial reference system.
3
'···i
The equations describing the velocity and acceleration of the missile airframe are written in the body-axis.
reference system (Fig. 2-1),.
This system is a set of
three mutually perpendicular vectors which are oriented
as shown, and fixed to the missile airframe.
is at the center of gravity of the missile.
The origin
Thex axis
lies along the longitudinal axis of the missile and is
directed positive toward the nose.
l
The y axis lies in
t.he plane formed by.wings two and four, and is directed
.positive along wing two..
The z axis lies in the plane
formed by wings one and three, and is directed along wing.
three.
The velocity and acceleration components are translated from the body-axis reference system into the
inertial reference system (Fig. :l-2).
This system is
defined as fixed on a flat., nonrotating earth with it's
z axis directed down along the gravity vector,
g·. ·
In
the horizontal plane, the reference direction is defined
as the projection of the missile-to-target position
vector, ID1T 0
,
at the time of launch.,
The unit vector
triad is defined as:
k=- ~1\-s\
J ~ (\:. ~ ~Q)j\~tv\\o\~\n ~
where Q is the angle between k and RMT 0
•
a
IJl
3
Lll
'""
~
·"'""'
"Z
t~.~"':.'
:J: .-4
:<
~ ~
et:
II
3 .,;.
16 ....
~~
\)
0
.A
u
....,)
~
::t.
()
....
~
u:
1/1
0
1!
v
l
.,.
"".,.
d:
,.,
I
Figure 2-1
Body-Axis Reference System
6
Figure 2-2
Inertial System and Euler Angles
7
Acceleration and Velocity
The equations which describe missile velocity and
acceleration in the body-axis system are given by:
.
c);,s_ +
u.::.
l'4\
\1"'\
"M - ~ 5\1'\ l1\"\
..
Cy't5
'I =:=
tJ\
-t ~ s\n
w
::2
C2'}S
q, ~ co.s ~M
1> ~ c.o~
l'i\
and
- q~ ""~"~
-t>
(1)
(2)
"Vw- "R. v...
4>1"\ ~s e~ . . Y-1
-T
C{ u..
( 3)
r
u..:= v.Q +
J U.~\,.
(4)
~: "~ +5.:, «\~
(5)
(6)
u~·v 11
where
and ware the missile velocity components
along the x, y, and
z.body~axes.
The rotational acceleration and velocity in the
body-axis reference system are given by the equations:
•
C-3.'\S\>
•
~m~S"'
'P~
(7)
l.u
Q. = l:;'d -
{.::r_'Z-~ -J:)fl.v.. :\
·~ 'P"R \
:t-.1 )
(8)
(9)
and
"P: 'Po +
5f> ~~ .
Q:r ~o+ sa.~'-
(10)
(11).
(12)
where P, Q, and R are the missile angular rates around
x,
y, and z body-axes.
The total missile velocity in the body-axis system
is:
(13)
The missile angles of attack are functions of velocity and are given by the equations:
( >4'& ~
"LV
,,
ul)'""
cTo.n ~ ::: U:::::
"T"'n j3
v
="U:
(14)
""-w
~ ~
The angles ~ and
(16)
~are
S :~ SS.~
approximation:i
(.15)
given by the small angle ·
~Qn ~.,
Thus
(17)
fl~
::: ..5'S.~
\.""'"" J3
(18)
and the angle of attack rates are
b t-~).
~'\.,
(19)
Euler Angles
The orientation of the missile body with respect to
the inertial reference system is described by the Euler
angles.
The equations which describe the Euler angles
are given by:
.
</.>~
..
.: . "\) "\' '"t'l"\ ~\n ~tl\
(21)
.
~M :=. Q
c.,g:;
(22)
Qlto\ - R .:s\n ~M
i-1"\::; ( Q ~\f\ q,~ -~ R
CO$
1\;..0~ 'e,~
(23)
r.t>t-\')
and
cptl\ o= <PI-\~ i' 5ci>M ~\.
eO"\=- eto\(,1" J -&,.... ~~
"'fM ~ "tMo +
Where
x,
<i>MI {)1'+\ 1
Y, and
z
and
(24)
(25)
5+~ ~\.,
i'i>\
(26)
are the angular rotation about the
axes of the inertial reference systen1.
Aerodynamic Coefficients
The equations describing the force coefficient,
ex,
are:
(27)
wllere
C. t-o ::: Ct..,
\-s'- -t- b C'1-o
(28)
(29)
and
The terms in parentheses in equation 29 show that
AC"~>o
is a function of the missile velocity and altitude, and
do not represent multiplication.
The equations describing the force coefficient, C-y,
are:
. (31)
.10
where
(32)
and
(33)
The equations describing the force coefficient, Cz,
are:
(34)
C?!: = Cz J Sy -\1 C.;..._ o(w
where
C.z~
=- CN.s -
{35)
c\'1-S...I. )~w\
and
(36)
The moment coefficient, C.l.,. used in equation 7 is
given by:
·( 37)
where
C. a.~~ .,co\'3~~ C.)).~0oo ol~o-r
=
oco\\ol.\
•
The moment coefficient,
"'
)
C~:; C..-.5\..,.:\"" Ccnc:\o...,v (a.~t'\.
Cm
1
Cs.~a-~ F (a,o"t)
( 38)
is given by:
tl>t;~Go-l-'R~
""Ci!. \
\J..c. J
(39)
where
C""s-\o..\:. ::o CC'r\.J
~r
--\-
c.~o~. o~..\.\}
( 40 >
C.'""~=: C"".so"'C""~.~, \ol.w\ + c~J~ \:r_, \
{41)
C.rnp~. =c~,.~,Q.. ctl\.r \ool..... \..., c ..... .,\~'fi.. \
(42)
\;r:, \ ::: {
(43)
\d.v \
l
.1.\ •
11
and
.
.
c"'...
= l\-T.20"\\b'i."c.\"\"'
(s7."3Q)-\-'c."''"
-.,\'\o2a~)~ ""(.c...,,~_.G-.,'3~1 b1.)~"'
oo...-nv
')
"<G
\:
:.{G
The moment coefficient, Cn, is given by:
where
C"5-\.n.~ : Cnc) ~"'j
-T
C.""JS oi."
( 4 6)
c."~ : : c~o-\- ct-'1~ \01.., \-\- C.to\ ~~ ~~\0 \
Cn_;a==-
(c.l"Y..:o+CI"'\.]'\"'-v\-tC;-~~ \~V
(
4 7)
(48)
and
C",..
:.:.(h • :ZO'\H:~~)C~ (.s7.3 R)-~ ( Cto\j -.\'\b2 ~i)fo
. g,o.-r
·
G
G
'\ (Cl'\S .-. \~~1 ~) S).
~
Motion in the Inertial. Reference System
As the missile velocities are calculated in the
body-axis reference, they are translated into the inerreference system.
It is in the inertial reference system
that missile velocity and position, and target velocity
and position are calculated.
The velocity components of the missile in the inertial reference system are obtained from the body-axis
components by means of the equa thm:
12
. -.· •
v
~!
(51}
where
0
\"f)=
0
(52)
\
0
(53)
0
0
0
0
c.o~ fj>
:; \n IJ>
0
-:s~n4
c.o!>4
(54)
The velocity components of the target are given by:
•
(.55)
"iT
The position of the missile and target are given
by:
5 .;.M ~\-.
'11"\
'iM.o -\- S~"" ~\,
ZM::.
5~"'-~
'1.,1"\ -:
)\1'1\o
+
'=
2Mo-\-
(!>6)
(57)
{58)
13
and
"'r ="'~o +Si, ~\:.
(59)
'1't ~
J60}
~ 5ZT C\~
(61)
'h :: "('to -\ j
ZT '= Z-t 0
The range from missile to target is calculated by
the equation
~,,.
"R ""' =
t t~"''):l. ~ ( '< .....~)'4
-t
1
(62)
\,z""S
where
{63)
(6 4)
(65)
2.2
Three Degree-of-Freedom Model
The reduction of the system to three degrees-of-
freedom is relatively straightforward.
By assuming that
the missile does not roll 1 does not move in the pitch
plane, and does not change altitude during flight, three
degrees-of-freedom are eliminated.
The assumption that
the missile does not roll represents no real restriction,
as the Sparrow missile does not roll in flight.
The
assumptions that the missile does not change altitude or
move in the pitch plane confines the flight of the
missile to the plane formed by wings two and four and
to a single altitude.
14
The assumptions mentioned in the preceding paragraph
imply that there is no angular rotation in roll and pitch
and that there is no velocity component in the z axis.
This statement applies to both reference systems.
Thus:
(66)
•
¢"' :. cf>IW\ :: 0
s~~ ~1"\ ~
o
Body-Axis Acceleration and Velocity
With the assumptions discussed above, the body-axis
accelerations and velocities become:
(67)
.-
{68)
vand
(69)
(70)
The rotational acceleration and velocity equations
are reduced to:
• c'"' '\ Sc.
'R-:::. :tac-.
(71)
"R ~ ~0 +
(72)
and
S -R ~'-
15
The total missile velocity is given by:
~J~
"1M.: (~4,..'-~aJ
(73)
The missile angles of attack become:
\ o.n
J3 ::: ~ ::: ot..., ::~TO\
(74)
and the angle of attack rates become:
(75)
where
(76)
Euler Angles
Since the three degree-of-freedom model assurnes
roll and pitch are zero, the Euler angle relationships
become:
(77)
and
(78)
Aerodynamic Coefficients ·
The equation describing the force coefficient, ex,
becomes:
(79)
where
C._. 0
::
C.-.."\~'"' -T
bC¥o 0
b.C.,. 0 s b Cl'-o (.M~C::.\\) + ~C-, 0 lf\\.TJ:'\V~£)
(80)
(81)
16 :
and
(82)
In the equation describing bC" , the Sv terms become
zero due to a characteristic of the Sparrow missile ..
Wings one and three control the yaw motion of the missile
and wings two and four act to control the pitch and roll
of the missilee
Thus, the movement of wings two and four
can be considered to be zero.
'l'he equation describing the force coefficient,
cy,
remains unchanged:
(83)
tv here
(84}
and
(85}
The equation describing: the moment coefficient, Cn,
becomes:
Cr.= Chs\...-\. +
Cr-.~.,.-v (2~r-) +C'i (~~;~:~
(86)
where
C.ns~\:.
=::
Cna ~'( -\- Cnf3~"
(87)
c"~ = c.t'\~ 0 +eMs~\=("\
(88)
Cnf3:- ( C~o + CM.,~." \OI.v\)
(8.9)
and
C.n
~...... l'
:::o
l\4-. 2e>'\\O~) C..~ G (51. oR) ""~9"\..i. G-.\'\C~L\~~-\- (c.""s~-..\~'\"'\till)
l"t
.
17
Hotion in the Inertial Reference System
The assumptions restrict the motion of the missile
to a plane.
However, the performance of any airborne
vehicle varies at different altitudes due to changing
atmospheric characteristics, such as viriations in atmospheric density.
In order Eo
t;:ferm~t-simulation
of
flights at various altitudes 6 this simulation will have
the capability of establishing the plane of flight at
various altitudes.
The terms which are dependent on
altitude are implemented in such a manner that the operator of the simulator may select the altitude, but once
the simulation is started the altitude is fixed (Fig. 23).
The inertial reference system which is implemented
in this three degree-of-freedom model is somewhat different from that used in the hybrid/hardware model.
The inertial system is a fixed rectangular system which
is independent of the missile-to-target position vector
(Fig. 2-4).
The motion of the target is confined to the same
plane as the missile, and it's velocity is confined to be
parallel to the X axis of the inertial system.
The tar-
get may be placed at any point in the plane, but once
the simulation has started, the motion is only in the
X direction.
-.~
Thus:
18
Figure 2-3
Planes of Flight
Figure 2-4
Inertial Reference System
20
(92)
and
(93)
(94)
The equations which translate the missile velocities
from the body-axis system into the inertial reference
system are:
t}\-'f)
(95)
l"A...,t') - ~ c..o~ (.)\-1")
(96)
)\i"\::: u..cos('l>..-''lf")""" 'J
~"" = """:i\.~
s\n
where
A=
to.n..\
'(1'-)t'\
').T- ~\"\
(97)
"l'he equations which describe the position of the
missile and the relative position of the missile and
target are given by:
){ b"' : ~t-\o-\'1&¥\ '::.
'(Mo T
RM\ ::
Sit'\ d.\:.
. (98)
c}\.
(99}
s-;t'-\
L(XI"\·•S
-\a
('C\'0\"t)a]
(100)
where
(.101)
(102)
The equation which describes the missiLe-target
relative velocity is given by:
( 103) .
21
where
(104)
2.3
Assumptions
As in all models of a system, it is very important
that the basic assumptions be kept in mind.
The assump-
tions involved in this simulation are:
(1)
Standard-day atmospheric properties are
assumed ..
(2)
The· simulation is a two-body model, the missile
and the target.,
It is assumed that the target
is constantly illuminated from launch to inter-
cept ..
(3)
The missile airframe is assumed to be a rigid
body with inflexible wings.
(4)
It is assumed that the missile experiences no
roll or pitch angular motion, nor is there
D\ovement along the vertical axis during flight.
Chapter 3
IMPLE!-1ENTATION
3.0
Introduction
Once the model has been developed, it must be imple-
mented in the necessary form.
In this case the implemen-
tation will consist of electronic analog devices.
t
Analog'
simulation provides real-time solution of differential
equations which is necessary in this simulation.
A·flow
diagram of the completed sections of the simulator is
·shown in figure
3.1
3-1~
Motor Burn De2endency
The mo·tor in the Sparrow is a boost-sustain motor 1
thus there are three stages of motor burn; boost,. sustain
and glj,de.
Each stage occurs for a. set period of time.
The thrust produced by the motor is constant in each
stage·but decreases in each stage until the thrust is
zero in the glide stage, as shown in figure 3-lo.
As the motor burns, certain physical properties of
the missile change such as mass and the location of the
center of gravity.
The hybrid/l1.ardware simulation report
provided the values of these terms as functions of time·
and motor burn phase.
These terms. are implemented as having a single value
for each phase of motor burn.
The terms which vary with-
in each phase are implemented with the value that occurs
22
t
!
c
at the midpoint of each stage.
The motor burn phase timing is implemented by using
resistor-capacitor networks with the appropriate time
constants.
Electronic relays select the appropriate RC
network in order to provide that each phase is of the
correct length..
Other switching networks insure that the
correct values of the missile properties are selected
for each phase&
3.,2
A flow diagram is shown in figure 3-2.
Aerodynamic Stability Derivatives
The aerodynamic force and moment stability deriva-
tives are nonlinear functions of missile velocity.
The
values of these functions were provided in the hybrid/
hardware simulation report.
By utilizing least squares
regression, a best fit, first order curve was determined
for each function.
Those terms which are functions of
altitude were are linearized in the same manner.
The
diagram in. figure 3-3 illustrates these functions.
3. 3
Aerodynamic Force and
~!oment
Coefficients
The next step is the implementation of the aerodynamic force and moment coefficients which are used to
calculate the body-axis velocity and acceleration components.·
Analog diagrams illustrating the calculation of
Cx, Cy 1 and Cn are shown in figures 3-4, 5, and 6 respectively8
The number in each block shown in figures 3-4,
5 1 and 6 is the page number on which an analog diagram of
24
that block will be found.
3.4
~_ody-Axis
Acceleration and Velocity
The aerodynamic force and moment coefficients are
used in the calculation of the velocity components and
angular rates in the body-axis reference system.
A flow
diagram of the calculation of u, v, and R is shown in
figure 3-7.
3.5
~uler
Angles, Dynamic Pressurer and Total Velocity
As the body-axis velocities and angular rates are
calculated, they are used to calculate the Euler angle,
dynamic pressure, and total velocity.
Figure 3-8 is a
flow diagram of these calculations.
3.6
yelocity Transform and
Positi~n
It is here that the body-axis velocities of the
missile are translated into the inertial reference systern.
As the inertial reference velocities are calculated .
the position of the missile, the position of the target,
and the missile-target relative positions and velocities
are calculated.
A flow diagram is shown in fig,ure 3-9.
25
Figure 3-1
Completed
S~ction
Flow Diagram
,.c.·
4
I
I
}
rD
t
'JI..
~
"3
0
u
!"'
~
~
3
~
Vl
s
...
..
tG
4
~
:I
Ill
l:t
l'f
'"I
0
J
(!)
Vl
~
I
t
5
Jo4
~
"'3,..
~
()
IJ
r::
3
"'
\II
z.
V'l
..
"'
HH"
....
It
~H,,
I\
1,,
,.
'·
~~P'
1111
c:O· ~
•
1.0
~
t!
':t
fJ
......
3
01
Figure 3-2
fl
v
d
""
o:c
~
"..
0
2
Ul
z
Motor Burn Dependency Diagram
)(.
0
0
::r
-
l
k
[~
I
'
l.
r
t
I.
r!
:
~· .
-..?.
~"!'~ ·;
n
0""' {.,§
()
..9
0
0
..
0
.,~
j')
ro <!\
0
0
tiD
;}
v
()
"
Figure 3-4
Flow Diag:ram of Cx
i
~l
A
f
i
I
~
.
•
I
(}"
('()
I
1',
i!
j
;
~
1'
;
l
t'
f
(){'Q
(
l
Figure 3-5
Flow Diagram of Cy
--,.....
n
__s
~
N
""
Ill
t:
u
N
:r
l
li
r
l
~
&
._._,
I
J
I
N
I
~
:r
IIli
I"
.,,('
~
4
::r
l
.,
!
I
""
.
~
~
ru"ct:;;~• ~;
Figure 3-6
Flow Diagram of Cn
31
!
'I
I
£)!\
\
w
'T
"
~/M
T}M
\R
•
~
0
-4
iI
E
•
u.
I
J
6
R
u..
,.fi
0
'R
R
Figure 3-7
Velocity and Rate Diagram
r.
I
~:.. ..
,...-....
~ ----~
I
~-o-tt,
!
i
''~M
:euler Angle, J?ressuret and Velocity
Figure 3-8
!
r
!!
l~-
i
u.
'
"}3
;J
';~
~3
"#.M
'P1
'l'M
19
I.\I
1
'/'f
Figure 3-9
'19
-
'IMT
~
)\M
"'{..,.,
)\T
~- ~f'IWG~
Velocity Transform and Position
Figu~e
3-10
Motor Burn Timing
Chapter 4
THE FUTURE
<;
4.0
-·
The Present
Chapters one and two are discussions of those funct.ions which have been implemented to this point.
As a
summary, those funtions are the aerodynamic characteristics of the missile 5 the velocity and position of the
missile! and the velocity and position of the target ..
4.1
Autopilot
The next step in the development of the simulator is
the construction of a synthetic autopilot, and this autopilot is being constructed at the present time.
It is
basical-ly the same as the ll.IM-7F autopilot except that
the roll and pitch sections are not required ..
The autopilot is a
devic~
which has missile acceler-
ation, angul.ar rateg and COimnanded acceleration as it's
input and calculates the wing deflection necessary to
implement the commanded acceleration.,
4.2
The Target Seeker
Since the Sparrow is a semiactive mis-sile it depends.
on the launching aircraft to illuminate the target.
The
signal reflected by the target is received by the front
antenna on the missile and the target seeker processes
this signal to compute a co;nmanded. acceler.'\tion.
34
"
35
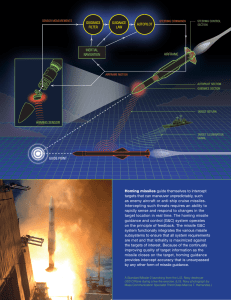
The Sparrow flies a course governed by proportional
navigation.
Proportional navigation requi:ces that the
acceleration of the missile be proportional to the
of-sight rate
line~
or
where k is ·the navigation constant, see figure 4-l.
The simulator will be able to operate in two modes as far .
as the seeker is concerned.,
A highly simplified model of
I
the seeker will be constructed in the simulator fer use
when an actual seeker is not available..
The simulator
will.also have the capability of operating with an. actual
target seeker in the loope
Figure 4-1
Proportional Navigation
I
36
4.3
Aircraft Interface
~efore
a Sparrow is launched the aircraft provides
information to the target seeker and autopilot concerning the velocity and location of the target.
An aircraft
interface will be incorporated into the simulator to
provide the seeker and autopilot with this infQrmation.,
A block diagram of the simulator is shown in figure. 4-2.
4 .. 4
Validation
Validation of the simulator will take place after
the autopilot and target seeker are constructed, and
an actual seeker is available..
The process which will
be used is not clearly defined, but the only raethod of
achieving a valid evaluation is to compare simulation
data with actual flight test data. ·
L
'
37
Aerodynamic·.
Response
Autopilot
r-
J
Geometry
'l'arget
AIM-7F
Seeker
Model
Target
Seeker
. ""':l..
.
;-- ~ Launch
1
LaWlch
.•
Aircraft
L
Interface
Figure 4-2
1
Simulation Block Diagram
APPENDIX
38
' -
i
Analog Diagram of Cy
.
G( ~
u
-o
v
~; ~·
·&;;'
~
G
:;)
,b 1-4...
.P !:i
u .._,
tt
43
1:
"7
.r
\)
<I
-~ v;?
t
Analog Diagram of Cy
li
I
.Analog Diagram of C n Qcunp
~
.:i.l
t
v l
Analog Diagram of Cn and R
-..
!
I
~
i
t!
I
~
fj
:J
~
~
I
~
t:
-~
II'
Analog Diagram of v and YM
'P
t
6<olt
•)
u
'· ~··:
.
~: ~·
Analog Diagram of u and XM
Analog Diagram
i
-l
K
li "':,
f
J-l
;,..;.
~
'
~
""T
Analog Diagram
47
•1:::._~
'~r-··
I
..c
""'-J.
'
$.,.
4(;
r l...
1
i
·~.
~
j
>!
;>l'"
I
Analog Diagram of Trigonometric Terms
A
~
I
0
v
c·
·~
Q
~
.,
~.
'"'
~ ... '
.
.
'
~!
.·j~
l
Analog Diagram of Trigonometric Terms
I
V)
0
u
.....
!.
~
&t.-1)
L
u:
...p
'!..
~
:r,
~
.;...-
...
~
:&.
~
l
...
-"
·I·
1
~IN
,;:
7
l
r
rt
?
-+
r'-J
Analog Diagram
·';:
-··~
.j
BIBLIOGRAPHY
Naval Missile Center, The Hybrid/Hardware Simula- ·
t.ion of the Sparrow II!, AIM-7F Missile 1 2 vols. 1 by
S. M. McWherter and J. E. S~mmons, Po~nt Mugu, California, NNC, 16 August 1974 (Technical Publication TP-74-37)
CONFIDENTIAL ..
Jacob Millman and Christos c. Halkias, Integrated
Electronics: Analo and Di ital.Circuits and S stems,
McGraw-H~ll Book Co .. ,
972
·
Leonard Strauss, Wave Generation and Shaping,
(McGraw-Hill Book Co., 1970)
General Dynamics, Sparrow AIM-7F Parametric Description, (General Dynamics,. Pomona oi vision, 1974)
.(GM6-335-ll3B} ..
50