NUMERICAL SIMULATION OF TURBULENT FLOW INSIDE THE CYLINDER OF A

NUMERICAL SIMULATION OF TURBULENT FLOW INSIDE THE CYLINDER OF A
NEW TWO-STROKE GRAIL ENGINE DESIGN
A Dissertation by
Shoeb Ahmed Syed
Master of Science, Wichita State University, 2010
Submitted to the Department of Aerospace Engineering and the faculty of the Graduate School of
Wichita State University in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
May 2015
© Copyright 2015 by Shoeb Ahmed Syed
All Rights Reserved
NUMERICAL SIMULATION OF TURBULENT FLOW INSIDE THE CYLINDER OF A
NEW TWO-STROKE GRAIL ENGINE DESIGN
The following faculty members have examined the final copy of this dissertation for form and content, and recommend that it be accepted in partial fulfillment of the requirement for the degree of Doctor of Philosophy with a major in Aerospace Engineering.
______________________________
Klaus A Hoffmann, Committee Chair
_______________________________
Walter J Horn, Committee Member
_______________________________
Roy Y Myose, Committee Member
_______________________________
Linda K Kliment, Committee Member
_______________________________
Ikramuddin Ahmed, Committee Member
Accepted for the College of Engineering
_______________________________
Royce Bowden, Dean
Accepted for the Graduate School
_______________________________
Abu S.M. Masud, Interim Dean iii
DEDICATION
To my wife, Nazneen Ahmed for her Emotional and Moral support and Patience my eternal appreciation is with her iv
Research is what I'm doing when I don't know what I'm doing - Wernher Von Braun.
A good scientist is a person with original ideas. A good engineer is a person who makes a design that works with as few original ideas as possible.
To the optimist, the glass is half full. To the pessimist, the glass is half empty. To the engineer, the glass is twice as big as it needs to be. v
ACKNOWLEDGEMENTS
All praises and thanks are due to Allah (subhanawataala) for bestowing me with health, knowledge and patience to complete this work. I would like to offer my sincerest gratitude to the following people without whom I could not have completed this research.
I would like to express my gratitude to my PhD advisor and Professor, Dr. Klaus
A. Hoffmann, for introducing me to the Grail Engine Technologies as CFD Analyst and for giving me unstinting guidance, advice and support throughout the execution of the thesis work and especially during the difficult times. I express my deep appreciation for all his support, patience, and friendship as well as his opinions, technical comments on the research and personal advices.
Many thanks to my other PhD thesis committee members, Dr. Walter Horn, Dr.
Roy Y Myose, Dr. Linda K Kliment, and Dr. Ikramuddin Ahmed whose inputs in my proposal and final thesis work were invaluable. The patience of my thesis committee, particularly while I was traversing the learning curve, is indeed commendable.
I am extremely grateful for the extraordinary help and support from Grail Engine
Technologies. I express my special thanks to Matthew Riley, Nicholas Bennington and
Rich Duncan for their support at Grail Engine. I am very pleased with the help and support of Nicholas Bennington, President at Grail Engine Technologies in completing my PhD thesis on Grail engine.
I would like to thank my colleagues and friends in Dr. Hoffmann’s group, especially Mr.Ghulam Arshed for his fruitful chats on CFD and many personal issues,
Mr. Hasan Khurshid for his general, academic, personal discussions and support, Mr. vi
Vellu for his support as a friend and as my colleague. Everybody in their own special way contributed to my personal and professional development during my studies at
Wichita State University.
I would also like to thank my friends Ali bhai, Shifath Ikram Khan, Zoya, Michelle,
Mehmood bhai, Gulzar uncle, aunty and all others who provided wonderful company and good memories that will last a lifetime.
Finally, thanks to my parents, sisters, brother, wife and all the family members for their emotional and moral support throughout my academic career and also for their love, patience, encouragement and prayers. vii
ABSTRACT
This work presents a novel way of implementing Autodesk computational fluid dynamics (CFD) software for internal combustion (IC) engine application. The main objective of this research is to develop a high fidelity simulation methodology for a state of art hybrid two-stroke Grail engine and to investigate the complex motion of piston and intake valve of the engine. Grail engine design is unique due to presence of single intake valve within the piston itself. Thus, the intake valve moves with the piston which makes the motion much more complex to study in the present work. Since the efficiency of combustion and the production of pollutants in the internal combustion engine are strongly dependent on the turbulent flow field in the engine cylinder. The focus is put in the analysis of the in-cylinder flow field dynamics and turbulence within the cylinder and through the complete engine cycle in the initial stages of development of the Grail engine. Finally, the scavenging process of the Grail engine with mixing and scavenging efficiency was also numerically investigated. In most engines, turbulent kinetic energy
(TKE) is almost exclusively generated during the intake stroke and enhances greatly the mixing of air and fuel to give better mixing during compression stoke. The 3-D simulation of the flow through the engine is performed by using finite element method.
Autodesk Reynold’s-averaged Navier-Stokes (RANS) K model is used to perform the calculations of the flow. The performance and possibilities that Autodesk CFD gives for this kind of application is evaluated. viii
TABLE OF CONTENTS
Chapter Page
1. INTRODUCTION .................................................................................................. 1
1.1 Background ................................................................................................ 1
1.2 Turbulence in the Engine Cylinder ............................................................. 2
1.3 Grail Engine ............................................................................................... 6
1.4 Aim and Objective ...................................................................................... 9
2. LITERATURE REVIEW ...................................................................................... 12
2.1 Experimental ............................................................................................ 12
2.2 Numerical ................................................................................................. 16
2.3 Current Research .................................................................................... 21
2.4 Literature Review Conclusion .................................................................. 21
3. AUTODESK CFD NUMERICAL SIMULATION ................................................... 23
3.1 Compressible Navier-Stokes Equations ................................................... 23
3.2 Turbulence Model .................................................................................... 25
3.2.1 RANS Model Based on Standard k-ε model ............................... 27
3.2.2 Scalar Transport Equation .......................................................... 29
3.3 Boundary Conditions ............................................................................... 30
3.3.1 Pressure Boundary Condition ..................................................... 30
3.3.2 Scalar Boundary Condition ......................................................... 30
3.3.3 Viscous Wall Boundary Condition .............................................. 31
3.4 Computational Setup ............................................................................... 31
3.5 Moving Mesh in Autodesk CFD ............................................................... 33
4. VALIDATION STUDY ......................................................................................... 35
4.1 Validations of Results and Discussion ..................................................... 35
4.2 Validation Model 1 ................................................................................... 37
4.3 Validation Model 2 ................................................................................... 43
5. GRAIL ENGINE STATIC SIMULATIONS STUDY .............................................. 53
5.1 Stationary Grail Engine In-Cylinder Flow Dynamics ................................ 53
5.1.1 Study of Piston Holes ................................................................. 54
5.1.2 Study of Piston Tube Channels .................................................. 63
5.2 Stationary Complete Engine Flow Dynamics ........................................... 73 ix
TABLE OF CONTENTS (continued)
Chapter Page
6. GRAIL ENGINE DYNAMIC SIMULATIONS STUDY .......................................... 79
6.1 Inlet Valve Motion Grail Engine In-Cylinder Flow Dynamics .................... 79
6.1.1 Simulation Description ................................................................ 80
6.1.2 Simulation Results ...................................................................... 81
6.2 Complete Grail Engine Motion In-Cylinder Flow Dynamics ...................... 85
6.2.1 Simulation Description ................................................................ 85
6.2.2 Simulation Results ...................................................................... 91
6.3 Grail Engine Uniflow Scavenging Simulation ........................................... 99
6.3.1 Simulation Description ................................................................ 99
6.3.2 Simulation Results .................................................................... 102
7. CONCLUSION .................................................................................................. 108
LIST OF REFERENCES ............................................................................................. 112
APPENDIXES ............................................................................................................. 118
A. Mesh Study on Validation Model 1 ........................................................ 119
B. Calculation of Scavenging Efficiency ..................................................... 123 x
LIST OF TABLES
Table Page
4.1.
Geometrical Details of Validation Model 2 .......................................................... 46
5.1.
Mass and Volumetric Flow Rate ......................................................................... 63
6.1. Specifications of Grail Engine Model for CFD Analysis ...................................... 88 xi
LIST OF FIGURES
Figure Page
1.1. Showing the Swirl and Tumble Flow Structures ................................................... 5
1.2. Grail Engine Model Parts Labels [8] ..................................................................... 9
3.1. Showing the co-ordinate system of moving solids [9] ......................................... 33
3.2. Showing the Mesh “Masking” concept of Moving Mesh [9] ................................. 34
4.1. Geometrical details of the validation model 1, dimensions are in mm ................ 36
4.2. Geometrical details of the validation model 2, dimensions are in mm ................ 36
4.3. 3-D Mesh for Validation Model 1 ........................................................................ 39
4.4. 2-D slice of mesh for Validation Model 1 ............................................................ 40
4.5. 2-D slice of Mesh showing Boundary layer Elements ......................................... 40
4.6. Axial Velocity Profiles at z = 20 mm for Validation Model 1 ................................ 41
4.7. Axial Velocity Profiles at z = 70 mm for Validation Model 1 ................................ 41
4.8. Velocity Vector Contour Plot for Validation Model 1 ........................................... 42
4.9. Streamlines Showing Flow Structures [52] ......................................................... 42
4.10. 3-D Mesh for Validation Model 2 ........................................................................ 46
4.11. 2-D Slice Mesh for Validation Model 2 ................................................................ 47
4.12. 2-D Slice Mesh for Validation Model 2 ................................................................ 47
4.13. Axial Velocity Profiles for 36 deg CA at z = 10 mm ............................................ 48
for Validation Model 2
4.14. Axial Velocity Profiles for 36 deg CA at z = 20 mm ............................................ 48
for Validation Model 2
4.15. Axial Velocity Profiles for 36 deg CA at z = 30 mm ............................................ 48
for Validation Model 2 xii
LIST OF FIGURES (continued)
Figure Page
4.16. Axial Velocity Profiles for 144 deg CA at z = 10 mm .......................................... 49
for Validation Model 2
4.17. Axial Velocity Profiles for 144 deg CA at z = 20 mm .......................................... 49
for Validation Model 2
4.18. Axial Velocity Profiles for 144 deg CA at z = 30 mm .......................................... 49
for Validation Model 2
4.19. RANS Velocity Vector Contour Plot at 90 deg for Validation Model 2 ................ 50
4.20. RANS Velocity Vector Contour Plot at 180deg for Validation Model 2 ............... 50
4.21. LES Velocity Vector Contour Plot at 90 deg for Validation Model 2 [53] ............. 51
4.22. LES Velocity Vector Contour Plot at 180 deg for Validation Model 2 [53] ........... 51
4.23. TKE Profiles at 90 deg for Validation Model 2 .................................................... 52
4.24. TKE Profiles at 180 deg for Validation Model 2 .................................................. 52
5.1. Geometry showing 5 types of Hole Configuration ............................................... 56
Inside the Grail Piston Head
5.2. 2-D Plane Slices showing Mesh for 5 types of Hole Configuration ..................... 57
Inside the Grail Piston Head
5.3. Velocity Vector Contour plot for 5 types of Hole Configuration ........................... 59
Inside the Grail Piston Head
5.4. Pressure Contour Plot for 5 types of Hole Configuration .................................... 60
Inside the Grail Piston Head
5.5. Iso-Velocity Vectors for 5 types of Hole Configuration ........................................ 62
Inside the Grail Piston Head
5.6. Geometry showing 3 types of Tube Configuration .............................................. 66
5.7. Geometry showing Mesh for one Tube Configuration ........................................ 67 xiii
LIST OF FIGURES (continued)
Figure Page
5.8. Geometry showing Mesh for Dual Tube Configuration ....................................... 68
5.9. Geometry showing Mesh for D-Tube Configuration ............................................ 69
5.10. Velocity Vector Contour Plot at YZ and XZ Plane ............................................... 70
for 3 Types of Tube Configuration
5.11. Pressure Contour Plot at YZ and XY Plane ........................................................ 71
for 3 Types of Tube Configuration
5.12. Iso-Velocity Vectors for 3 Types of Tube Configuration ...................................... 73
5.13. Geometry showing 2 Types of Engine Configuration .......................................... 75
5.14. Geometry showing Mesh for GEN 1 Engine Configuration ................................. 75
5.15. Geometry showing Mesh for GEN 2 Engine Configuration ................................. 76
5.16. Velocity Vector Contour Plot for 2 Types of Engine Configuration...................... 77
5.17. Pressure Contour Plot for 2 Types of Engine Configuration ............................... 78
6.1. Geometry showing Rectangular Hole with D-tube Configuration ........................ 81
Inside the Grail Piston Head
6.2. 2-D Plane Slices showing Mesh for Rectangular Hole with D-tube .................... 81
Configuration Inside the Grail Piston Head
6.3. Pressure Velocity Vector Plot for Rectangular Hole with D-tube ........................ 83
Inside the Grail Piston Head
6.4. In-cylinder Vortex Structures [54] ....................................................................... 84
6.5. TKE Plot for Rectangular Hole with D-tube Configuration .................................. 84
Inside the Grail Piston Head
6.6. Geometry showing Grail Engine Model with Piston Crown ................................. 88
6.7. Geometry showing Mesh for Grail Engine Model ............................................... 89 xiv
LIST OF FIGURES (continued)
Figure Page
6.8. Valve Timing of Grail Engine .............................................................................. 90
6.9. Plot Showing Grail Engine Cylinder Volume with Crank Angle ........................... 90
6.10. Pressure Contour Vector Plot of Grail Engine .................................................... 95
at Different Crank Angles
6.11. Turbulent Kinetic Energy (TKE) Contour Vector Plot of Grail Engine ................. 96
at Different Crank Angles
6.12. Plot showing Compression Pressure for Grail Engine Cylinder Model ............... 97
6.13. Plot showing TKE for Grail Engine Cycle ........................................................... 98
6.14. Geometry showing Grail Engine Model with Piston Crown ............................... 101
6.15. Geometry showing Mesh for Grail Engine Model ............................................. 101
6.16. Pressure Contour Plot during the Scavenging Process of Grail Engine ........... 104
6.17. Pressure Mass Fraction Contour Plot during the .............................................. 106
Scavenging Process of Grail Engine xv
LIST OF ABBREVIATIONS/NOMENCLATURE
2-D Two-Dimensional
3-D Three-Dimensional
ATDC At Top Dead Center
BDC Bottom Dead Center
BSR Barrel Swirl Ratio
BTDC Before Top Dead Center
CA Crank Angle
CFD Computational Fluid Dynamics
CI Compression Ignition
DI Direct Inject
DNS Direct Numerical Simulation
FS-HCCI Forced Semi Homogeneous Charged Compression Ignition
GDI Gasoline Direct Injection
HCCI Homogeneous Charge Compression Ignition
HP Horse Power
IC Internal Combustion
ICE Internal Combustion Engine
LDA Laser Doppler Anemometry
LDV Laser Doppler Velocimetry
LES Large Eddy Simulation
Miles Per Gallon MPG’s xvi
LIST OF ABBREVIATIONS/NOMENCLATURE (continued)
PCCI Premixed Charge Compression Ignition
PISO Pressure-Implicit Split-Operator
PIV Particle Image Velocimetry
PTV Particle Tracking Velocimetry
RANS Reynolds Averaged Navier-Stokes
RMS Root Mean Square
RNG Re-Normalisation Group
RPM Revolution Per Minute
SI Spark Ignition
SIMPLE Semi-Implicit Method for Pressure-Linked Equations
TDC Top Dead Center
TKE Turbulent Kinetic Energy
URANS Unsteady Reynolds Average Navier-Stokes Equation xvii
LIST OF SYMBOLS
Gas Constant = 1.4
Density
Viscosity
t
Eddy Viscosity
Dissipation Function
S
Source Term (Rotating)
S
DR
Source Term (Distributed Resistance) k Thermal Conductivity
Turbulent Energy Dissipation q v
Volumetric Heat Source
i
Rotational Velocity
A Area b Breadth Dimension
K Turbulent Kinetic Energy l Length Dimension
P Pressure psig Pounds Square Inch Guage t Time
T Temperature
U, V, W Averaged Velocity Quantities xviii
LIST OF SYMBOLS (continued) u, v , w X, Y, and Z component of velocity
V Volume w Width Dimension xix
CHAPTER 1
INTRODUCTION
1.1 Background
Internal combustion (IC) engines are the major source of power production at present in automobile industry. IC engines find their applications in virtually every passenger car, trucks, ships, trains and aircrafts. These efficient power generators are reliable, small, light and cheap. Furthermore, they use high specific energy density fuels that can be easily stored inside a small chamber and distributed to the vehicle. These properties are very advantageous for road vehicles. The IC engines based on strokes are classified into two major categories namely four-stroke and two-stroke engines. The advantages of two-stroke engine over four-stroke are fewer parts, simplicity, reduced friction, lower maintenance and more power (twice). The disadvantages are smoky, pollution, un-economical and lubrication using petrol-oil mixture. However, due to technological advancements of today in direct fuel injection and electronic engine management systems have enabled the two-stroke engine to dominate the small engine market such as boats, snowmobile etc., compared to four-stroke competitors. The twostroke engine still doesn’t find its place in automobile industry due to the following limitations:
1. Two-stroke engine is dependent on oil mixed with fuel (total-loss) lubrication system. The burnt oil with their carbon emissions is acceptable for recreational emission regulation but not for stricter automobile industry.
2. Dependency of two-stroke engine on timed crankcase compression. The process is complex and expensive due to required crankcase sealing.
1
3. Crankcase pressure dependency. It requires as little void as possible for the crankcase. The void is usually filled with flywheel making it expensive and heavy.
4. The oil-fuel lubrication system provides little amount of lubrication which in turn requires costly bearings making it expensive, heavy and complex.
Grail engine technology overcomes the above mentioned limitations that the present two-stroke engine faces with its unique design characteristics. Grail engine does not use the oil-fuel mix lubrication system instead uses the traditional lubrication system of the four-stroke engine. This is made possible by having separate channels (tubes) for the compressed air injection into the cylinder. There are no side ports and the inlet valve is present within the piston and outlet valve on the top of cylinder. This type of configuration helps in achieving uni-flow scavenging as well as avoids crosscontamination of oil in the exhaust.
1.2
Turbulence in Engine Cylinder
The flow field inside a traditional four-stroke internal combustion engine (ICE) has been the subject of research over the past four decades because of its profound influence on the performance and emission characteristics of the engine [1]. Modeling of fluid flow inside the IC engine involves extreme fluid velocities within the cylinder. These high fluid velocities results in substantial high Reynolds number which indicates the presence of turbulence inside the cylinder of the engine. Turbulent flows are characterized by cyclic variation of the flow field both spatially and temporally [2]. These fluctuating mixes helps in transferring the quantities such as energy, mass and species concentrations fast compared to the flow with no turbulence or fluctuating velocities.
2
The presence of turbulence greatly influences the combustion characteristics such as fuel distribution inside the engine cylinder, which are mainly controlled by the in-cylinder fluid flow dynamics. Further, fuel injection introduces additional complexities due to the difficulties in understanding the physics of two-phase flows. Pollutant emissions from the engine are basically controlled by the details of the combustion and turbulent fuel–air mixing processes. Therefore, a detailed understanding of the turbulent flow dynamics in a cylinder is required. Engineers are attempting to understand the turbulent nature of the flow and create an ideal flow pattern inside the cylinder which would optimally reduce emissions and improve engine performance without compromising fuel economy.
The fluid flow in the cylinder exhibits different flow characteristics depending upon the stages of the flow. During the first stage of intake stroke, the flow enters into the cylinder through the inlet valve forming a jet. This jet flow depending upon the geometry of the inlet port, valves and their timing creates two types of coherent motion in the cylinder [3]. Swirl (flow rotating about the cylinder axis) and tumble (flow rotating perpendicular to the cylinder axis) as shown in Figure 1.1. The incoming jet flow energy is converted into generating flow structures with large-scale turbulent motion during the inlet stroke.
During the second stage of the intake stroke, much of this turbulence decays due to the energy of the jet coming to an end and also due to the viscosity of the fluid. In addition, the turbulence spreads itself and transports fuel-air mixture uniformly throughout the cylinder. The presence of turbulence in the flow accelerates the transport phenomenon and does it many orders of magnitude better than molecular transport.
3
During the initial stage of compression stroke, compression of air results in increase of density and change in turbulent length scales of the flow structure. This effect results in amplifying the turbulence, although the viscous decay and turbulent transport continue. Thus, turbulence plays a vital role in charge preparation for the combustion process stage. In the final stage of exhaust stroke, minimal turbulence is left or generated.
The study of the organized flow structures such as swirl and tumble as shown in
Figure 1.1 and their effects on the turbulence is of great importance in producing an ideal ICE combustion environment. Swirl and tumble can be induced in the cylinder in the way the inlet ports and valves are arranged, the timing of the valve opening and the flow entering the cylinder [3]. It’s impossible to generate swirl without inducing some tumble but tumble can exist without swirl independently. In addition, the vorticity in the tumble can be augmented by the compression process, or by squish in the case of swirl
[3]. During the compression stroke stage, there is no change in the amount of the swirl vorticity, but the tumble vortices break during the compression stroke and contribute to a higher turbulence level at ignition [4]. Engine designers are trying to optimize the flow field which has an ideal mix of both swirl and tumble within the cylinder.
4
Figure 1.1: Showing the Swirl and Tumble Flow Structures
The flow field in the cylinder governs the flame propagation in spark-ignition engines and controls the fuel-air mixing and premixed burning in compression-ignition
(diesel) engines [1]. Therefore, it is very important to understand the flow field in the cylinder completely in order to optimize the combustion chamber for the modern internal combustion engines such as homogeneous charge compression ignition (HCCI), gasoline direct injection (GDI) engines etc.
Most of the previous research on the flow field dynamics is carried out on fourstroke engines with two inlet/exhaust valves. This knowledge of the flow field can be extended from the four-stroke engines to “Grail” engine two-stroke engine with single inlet/exhaust valves because of the similarity of design setup.
Turbulence modeling is still a difficult task when solving practical flow problems.
In general, most of the flows in nature are turbulent. It requires high computational effort to solve the governing equations exactly to the smallest scale of turbulence. Therefore, the governing Navier-Stokes equation is Reynolds averaged. This greatly reduces the computational efforts but also introduces additional terms that need to be modeled to
5
achieve a closure for the unknowns. The additional terms are modeled using different turbulence models. Not one turbulent model completely describes the process involved in the turbulent flow. This is due to the fact that information is lost during the averaging procedure. Therefore, it is necessary to solve the governing equation exactly without any modeling. Direct numerical simulation (DNS) offers potential to solve the governing equation exactly for all the relevant turbulent flow scales. However, the computational cost associated with DNS is not practical for engine studies [5]. Therefore, for IC engine applications Reynolds averaged Navier-Stokes (RANS) and more recently Large Eddy simulation (LES) based approach are typically applied for turbulent flow simulation.
RANS approach is based on ensemble average of Navier-Stokes equations and hence cannot predict the local unsteadiness in the flow. But the computational meshes typically used for RANS modeling for in-cylinder flows is sufficient to capture 85-90% of global flow characteristics and flow’s kinetic energy [6]. RANS approach with turbulence models such as K and K models are mostly used in industrial research in the initial stages of development due to the fact that they provide sufficiently accurate results for the relative in-expensive computational costs. LES [7] approach can capture local unsteadiness but are computationally more expensive than the RANS approach. It uses approximately 4 times the computational time and cost of the RANS approach.
1.3 Grail Engine
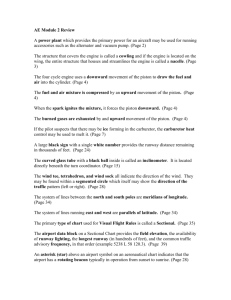
The present research is carried out in the initial design development stages of the Grail engine [8]. Grail engine is a new two-stroke engine design that will revolutionize the present two-stroke engine market with its unique design characteristics and is shown in Figure 1.2. This engine is designed to operate on multiple fuels,
6
reduced emissions compared to present two-stroke engines and better efficiencies. The major components of the two-stroke Grail engine consist of:
• A single intake valve located at the center of the piston and moves with it
• A single exhaust valve located at the center of the cylinder head
• Three spark plugs located around the centered exhaust valve
• A single fuel injector located on the cylinder head
• Two intake tube channels to piston ports on either sides
• Two piston intake tubes attached to intake tube channels
• A pre-compression inside the tubes that has one-way reed valve
The working principle of Grail engine is as follows. As the Grail engine piston travels upwards, it creates a vacuum inside the tube channels beneath the piston and allows the fresh air charge inside the tubes through the one-way reed valve. During this process, compression occurs within the cylinder with the direct injected fuel and combustion takes place at top dead center (TDC) with the three spark ignition. As the piston moves downwards after combustion, it creates the compression pressure inside the tube channels. Therefore, pushing the fresh air charge inside the combustion chamber through the intake valve located inside the piston. During this process, just before bottom dead center (BDC) exhaust valve opens to expunge out the burnt gases.
At BDC, both intake and exhaust valve are opened and closes just after BDC and this cycle continues.
The new Grail engine [8] design has resulted in two new concepts known as “Grail
Cycle,” which is combination of homogeneous charged compression ignition (HCCI) and simultaneously operating in Miller cycle and forced semi-homogeneous charged
7
compression ignition (FS-HCCI). The other major advantage of the Grail engine design is that Grail engine does not exhibit cross-contamination of fuel and air like its other twostroke counterparts. This results in reduction of Grail engine emissions and yet produces high power and torque for less fuel compared to large engines. Crosscontamination occurs due to presence of side intake and exhaust ports along the cylinder wall of the engine and the oil used for lubrication of the piston enters these side ports resulting in emissions. No lubrication to the piston results in premature wear of the piston. Therefore, fuel and oil mixture is used in conventional two-stroke engine to provide both lubrication and fuel to the engine resulting in high emissions. The present
Grail engine design solves these issues and will exceed in federal auto emissions.
The other advantages specific to Grail engine design are multiple fuels on the fly, variable compression ratio on the fly, higher efficiencies and high mileage projection compared to other two-stroke engine in the present market.
8
Figure 1.2: Grail Engine Model Parts Labels [8]
1.4 Aim and Objectives
The aim of this project is to conduct a thorough, quantitative, baseline computational fluid dynamics (CFD) study on the flow dynamics and efficiency of a single-cylinder two-stroke Grail engine to support ongoing design efforts by Grail engine technologies. The CFD analysis will primarily identify areas such as piston, tube channels and engine intake where design changes of the Grail engine could be implemented to improve its performance and evaluate the turbulent kinetic energy within the cylinder. The limited data acquired from physical testing was used to refine and
9
validate the CFD engine model to support the development of a direct-injected Grail engine. The tasks necessary to fulfill the project objectives are:
Present a novel way of incorporating Autodesk CFD [9] software implementation to Grail engine application
To test the robustness, accuracy and modeling capability of Autodesk CFD [9] finite element solver to in-cylinder flow applications
To understand the current state of the art of in-cylinder turbulence analysis
To determine the efficiency of Autodesk RANS K turbulence model by validating two validation models from literature for use in IC engine applications
To simulate Stationary Grail engine in-cylinder flow dynamics at BDC of Gen 2 engine to show the tornado effect of the flow inside the cylinder.
To simulate Stationary Complete Grail engine flow dynamics of Gen 2 and Gen 3 engine showing the drop in pressures inside the tubing and change the design accordingly
To understand the turbulence and flow dynamics for different types of piston configurations and change the design accordingly. Opening the holes inside the piston as much as we can to allow more air flow through the piston and make the flow directional to allow mixture of “swirl” and “tumble” flows inside the combustion chamber which in turn will increase the efficiency of the combustion.
To determine the most efficient mesh size for moving mesh in Autodesk CFD for
Grail engine simulations
To implement the difficult motion of inlet valve with piston in Grail engine design using Autodesk CFD software
10
To understand the flow phenomena such as turbulence and flow structure variation for the complete two-stroke Grail engine cycle and specifically for intake and compression cycle
To validate the compression pressure with the experimental data available for a given approximate intake and exhaust valve timing
To simulate the scavenging process of the two-stroke Grail engine using Scalar simulation of Autodesk CFD software [9] and approximately calculate the scavenging efficiencies
11
CHAPTER-2
LITERATURE REVIEW
The following literature survey gathers information on the in-cylinder flow dynamics, scavenging process of IC engines and the latest techniques of predicting the in-cylinder flow dynamics both experimentally and numerically. The turbulent kinetic energy generated by flow structures inside the cylinder can be divided into swirl and tumble, both of which is included in this literature review.
2.1 Experimental
The experimental method for flow visualization is a very expensive technique that uses optical and laser setups around the engine cylinder. The normal setup involves the camera, laser and optical arrangements being mounted around the engine cylinder to visualize the flow and measure instantaneous velocities of the flow. Two techniques generally used to measure the flow in the experimental configuration of IC engines are particle image velocimetry (PIV) and laser Doppler velocimetry (LDV) or laser Doppler anemometry (LDA). The type of approach used depends on the aim of the experiment.
The expensive nature of the experimental technique for analyzing the flow parameters further justifies the need for increasing the efficiency of the computational approaches.
The most distinguishing visual features of in-cylinder flow are the swirl and tumble flow structures that are generated by the piston motion inside the cylinder of the engine. These structures specifically tumble breaks down very rapidly during the compression cycle as a result of the flow turbulence.
Heywood [3] reported that generation of swirl and tumble vortices during the intake process inside the IC engine is responsible for high turbulence in the later stages
12
of the compression leading to faster and efficient combustion. Zegers et al. [10] used the PIV technique to investigate the mixing inside the cylinder by measuring the instantaneous velocities and turbulent intensities of a heavy duty premixed charge compression ignition (PCCI) engine.
Based on the experiments, Murali and Mallikarjuna [11] subsequently used PIV technique to experimentally investigate the in-cylinder fluid tumble flows in a motored IC engine with a flat piston at different engine speeds during intake and compression strokes. They found that the tumble ratio mainly varies with crank angle positions and the maximum turbulent kinetic energy (TKE) increases at higher engine speeds at the end of compression stroke.
Kuwahara and Ando [12] experimentally investigated the engine in-cylinder flow studies using particle tracking velocimetry (PTV) and observed that the effective production of turbulence inside the combustion chamber helps in better combustion control in a premixed lean burn engine and in a gasoline direct injection (GDI) engine.
Khalighi [13] investigated the in-cylinder flow measurements using PTV technique and observed that the mix of swirl and tumble flow structures should be in optimum level in order to have good turbulence during combustion. Li et al. [14] applied the digital PIV technique to study the in-cylinder flows in a single-cylinder engine and estimated the velocity fluctuations, vorticity, strain rate and turbulent length scale.
They showed that the low-frequency velocity fluctuation component is mainly responsible for the spatial variation in velocity and turbulent kinetic energy distributions inside the cylinder.
13
Yasar et al. [15] investigated experimentally the characteristics of flow emerging from the intake port of the cylinder. A High-image-density PIV technique was used to measure the velocity distribution in order to observe and analyze the flow behavior revealing the details of the flow characteristics inside the cylinder chamber. They observed that the flow structure changed substantially along the cylinder stroke due to the geometry of the intake valve port.
Li et al. [16] carried out research on a four-valve spark ignition engine. The results of PIV measurement showed the production of strong tumbling flow in the cylinder from the shrouded intake valves. They observed symmetrical distribution in a perpendicular plane to the cylinder axis from initial stages of intake to latter stages of compression. They also observed that this flow pattern helped them in the stratification of two fuels from two ports laterally.
Reeves et al. [17] used PIV technique to study the barrel swirl in a four-valve, motored, and optically accessed internal combustion (IC) engine. They observed that at both high and low barrel swirl ratio (BSR) cases, a tumbling vortex motion formed during induction persist throughout the majority of the compression stroke. However, the details of formation of barrel swirl formation during induction and its modification during compression stages depends on two events. They explained the events qualitatively as interaction between vortices of unequal strength during induction, secondly interaction between the local flow field generated by the piston during compression and the large scale swirl motion. In the case of low barrel swirl, the large-scale motion exhibits lower mean velocities and undergoes significant distortion due to significant dissipation.
14
Gerardo et al. [18] measured quantitatively intake valve flow patterns using particle image velocimetry (PIV) for a commercial 4-valve diesel cylinder. They measured the intake valve flow patterns at low (600 RPM) and high (1000 RPM) engine speeds. The results from experiments were shown in the form of vector plots on several planes in the valve area for each engine operating conditions.
Stansfield et al. [19] experimentally measured the in-cylinder flows using PIV at the end of intake stroke on a plane in between the intake valves of a single cylinder optical engine at the engine speeds of 750, 2000 and 3500 RPM. They observed that the tumble ratio (TR) significantly changed for the higher engine speed in between 2000 and 3500 RPM. The flow structure due to change in TR is also shown for these engine speeds. At the high engine speed, an increase in the flow of air traveling underneath the recirculation vortex caused the flow structure change. This allows the vortex position to shift further up and to the right when compared to the low engine speed.
Auriemma et al. [20] experimentally investigated the complex structure of the intake flow in a diesel engine using Laser Doppler Anemometry (LDA) technique. They evaluated the turbulence intensity and mean motion of the diesel engine running at
2000 RPM using the dynamic valve flow arrangement test rig. They observed that both the mean tangential and axial velocities have maximum magnitude at valve closing and increase during the valve opening. They also quantified the velocities, complicated flow field structures and turbulent intensity profiles around the valve closure and until 60° crank angle (CA) after the valve closure.
Nadarajah et al. [21] carried out an experimental investigation of the swirling flow through an axisymmetric port and poppet valve assembly under steady flow conditions.
15
Three different swirl rates were analyzed. Swirl rate effect on the mean flow and turbulence characteristics of the flow field were studied. Laser flow visualization was used to analyze the flow structure. Laser Doppler anemometry (LDA) technique was used to calculate Reynolds stresses and velocity components of the flow. They compared the results with those obtained with the non-swirling flow.
Felice et al. [22] experimentally resolved in-cylinder cycle using LDV measurements in a diesel engine with a compression ratio of 21:1 and having a highsquish combustion chamber. The engine was operated for engine speed varying from
1000 to 3000 RPM. They concluded the influence of engine speed on the mean motion and turbulence of the engine. They also analyzed the effect of cut-off frequency selection on turbulence values.
2.2 Numerical
Most of the studies of the fluid flow dynamics inside IC engines were mainly carried out experimentally using techiques such as PIV (Particle Image Velocity), LDA
(Laser Doppler Anemometry), and cameras, etc. However, these experimental techniques are very time consuming to set-up and expensive. As a result, numerical techniques are used as an alternative solution to experimental techniques. The numerical technique such as computational fluid dynamics (CFD) has recently become a useful tool to study the fluid flow dynamics inside the cylinder of IC engines. In IC engines, CFD is especially useful to design complex components such as combustion chambers, intake and exhaust manifolds, fuel injectors, spark-plugs and other parameters. The early numerical simulations of IC engines appeared in the eighties only provided, with poor accuracy and information about the general configuration of the flow
16
field inside the cylinder. It was due to the fact that the simulations were carried out in 2-
D due to limitation of resources available at that time. Yet for detailed computation of incylinder fluid flow structures, most of the researchers agree with the 3-D modeling of these flow structures.
After these early numerical studies, numerous CFD efforts have appeared in recent years. The researches carried out the work using number of different CFD codes such as, KIVA [39, 41], STAR-CD [40, 42-44], FIRE [45,46], Fluent [47], CFX [48], etc.
Proper modeling of the in-cylinder flow dynamics and its instabilities using the appropriate turbulence model becomes important in order to achieve reliable flow predictions. Present standards in engine simulation are Reynolds Averaged Navier-
Stokes (RANS) methods and Large Eddy Simulation (LES) technique. LES and RANS techniques differ in the way they resolve the scales present in engine flow dynamics.
RANS simulations are based on a statistical averaging for mean flows and thus, models the entire spectrum of scales of the flow.
However, in LES, the large turbulent scales of the flow are directly resolved, while the small scales are modeled. Thus, LES model predicts well as compared to
RANS model. LES inherently allows addressing large scale unsteady phenomena, and thus has a good potential to predict engine unsteadiness. The problem with LES is requirement of high mesh density which would lead to a very high CPU time. Therefore, the use of LES is not very common. Whereas, the RANS method takes less CPU time and is used generally in industrial applications. In the field of RANS methods, the twoequation model standard K is the most used turbulence model to simulate IC engines.
17
Payri et al. [23] studied the in-cylinder flow of diesel engine for three different piston configurations using K turbulence model and validated the results with experimental data. They confirmed that the piston geometry had little influence on the in-cylinder flow during the intake phase and also in the initial stages of compression.
However, they confirmed that the piston geometry played a significant role during the latter stages of compression, at top dead center (TDC) and in the early phases of the expansion by controlling the ensemble averaged means and turbulent velocity fields.
Ahmadi et al. [24] numerically investigated the different variants of K turbulence model for axis-symmetric engine. The behavior of the important turbulence parameters including the intensity, large scale and dissipation time scales were investigated during the induction, compression and expansion strokes of the engine.
Haworth et al. [25] developed a numerical method by joining monte-carlo method and probability density function for 2-D and 3-D turbulence flow calculation for in-cylinder flows in IC engines. Haworth et al. [26] used the multi-dimensional code on the above two models to numerically study the influence of the intake configuration on the flow structures for 2 and 4 valve cylinder engine configuration.
Naser and Gosman [27] numerically investigated the variants of K model for axis-symmetry inlet valve assembly for incompressible fluid flow without combustion.
The numerical results were validated using the available experimental flow field data.
Gosman et al. [28] studied both numerically and experimentally the in-cylinder turbulent flow characteristics of an axis-symmetric flow in a motored reciprocating engine without combustion. The results suggested that the velocity field was influenced strongly by the engine geometry rather than engine speed.
18
Gosman and johns [29] numerically analyzed the fuel-air mixing in direct injection engine without the combustion. They observed that the spray induced velocity and turbulence levels in the air are comparable to or may be greater than the turbulence level produced during the swirl and squish phenomenon. Ahmedi-Befrui et al. [30] studied multi-dimensional calculation of combustion in an idealized homogeneous charge engine. The combustion chamber was equipped with a central spark plug, inlet and exhaust valves. The results were analyzed at different engine speed, ignition timing and fuel-air ratio. They observed that the combustion affects the mean flow turbulent structures. However, the effect on the turbulent intensity parameter is very small. The coefficients of the turbulence model are sensitive to the combustion predictions.
Gosman and Harvey [31] numerically analyzed the fuel-air mixing in an axissymmetric direct injection (D.I) diesel engine. They used their own developed code and found that the model produces qualitative realistic results predictions of the major phases of the combustion process such as fuel ignition and burning. Jakirlic et al. [32] carried out numerical study of swirl effects on the flow and turbulence in a valve less piston-cylinder assembly. They analyzed the mean velocity and turbulent stress near the cylinder wall and the piston.
Ranasinghe and Cant [33] used the model based on probability density function and modeled a turbulent combustion for spark ignition engine. The results agreed well with the experimental data of a homogeneous charge engine. Watkins et al. [34] carried out numerical investigation of the premixed turbulence combustion modeling for sparkignition engine. They used second order PISO algorithm to capture the flame behavior near the solid wall. Chen et al. [35] carried out both numerical and experimental
19
analysis of velocity of a steady flow through a straight generic inlet port. The mean flow features predicted using commercial CFD code matched well with the experimental data.
El Tahry [36] studied the basic equations for K model and its variants under engine operating conditions with a view to identify important terms that appear during compression/expansion in engine cylinders. It has been found that some of the model terms used in the turbulence model can be varied and their effect is studied.
Calculations have been carried out using the modified epsilon equation, and the results have been found to be more plausible physically than those obtained with an earlier version. It is noted that more experimental data are required for validation purposes.
Sushma and Jagadeesha [37] studied the effect of different piston configuration on in-cylinder flow structures and turbulence inside the cylinder of a diesel engine. They used Computational Fluid Dynamics (CFD) code Fluent 13 and RNG K turbulence model. Paul and Ganesan [38] studied the effect of helical-spiral, helical, and spiral combination intake manifold configuration on in-cylinder flow structures and turbulence inside the cylinder of a diesel engine motored at 3000 RPM. They predicted swirl velocity, flow structure and variation of turbulent energy inside the cylinder with different manifolds. The turbulence was modeled using RNG K model. They concluded that the maximum swirl ratio inside the cylinder was achieved using helical-spiral manifold than the helical manifold.
Epstein et al. [39] numerically simulated the scavenging flow in a two-stroke engine with a moving piston. They presented the results for three engine designs that differ only in the angle of their boost ports. They observed that the trapping efficiency
20
increases with increased boost angle. They also suggested that the computational methods developed in their work will be useful as a design tool for assessing the influence of engine design parameters on scavenging efficiencies of two-stroke engines.
Yu et al. [40] numerically simulated the direct injection (DI) two-stroke gasoline engine to better understand and assist the engine design. Two-phase flow inside the cylinder of the engine was evaluated. They analyzed two cases, one with the injector at the cylinder head and the other at the cylinder side wall. They completed the simulation for two complete cycles to obtain a developed flow filed for the fuel-injection cases.
2.3 Current Research
In the present research, the numerical investigation of the two-stroke Grail engine design was carried out utilizing Autodesk CFD finite element solver. The main purpose was to study and simulate the flow field dynamics of the Grail engine and improve the design depending on the CFD results. In the early stages of the study, stationary CFD analysis was carried out for the in-cylinder flow dynamics for different piston and tube channel configurations as well as for the complete Grail engine. In the latter stages of the study, CFD analysis was carried out for the complete two-stroke engine cycle with dynamic motion of the piston, intake and exhaust valve Grail engine assembly. Finally, numerical simulation of the scavenging process of the two-stroke
Grail engine design was carried out using the Autodesk CFD scalar formulation.
2.4 Literature Review Conclusion
The present investigation was aimed at exploring the in-cylinder flow phenomena of a two-stroke Grail engine by using the Autodesk CFD RANS based two-equation
K model. The scavenging process of the two-stroke Grail engine was also
21
simulated using the Autodesk CFD scalar formulation using two gases air and carbondioxide. In order to validate and assess the capability of Autodesk CFD finite element solver, two validation models were simulated and the results were validated from the experimental data available in the literature.
22
CHAPTER-3
AUTODESK CFD NUMERICAL METHODOLOGY
3.1 Compressible Navier-Stokes Equation
Autodesk CFD finite element solver [9] is a commercial CFD software used for solving governing flow equations (equations [1-5]) using finite element Galerkin's method of weighted residuals discretization method. In the present work, the compressible flow equations were solved using an implicit segregated solver and variants of streamline upwind scheme (ADV1). The system of equations that govern the in-cylinder flows are the compressible Navier-Stokes equations. The governing partial differential equations (pdes) can be written as:
Continuity Equation:
t
u
x
v
y
w
z
0 (1)
X-Momentum Equation:
u
t
u
u
x
v
u
y
w
u
z
g x
p
x
x
2
u
x
y
u
y
v
x
z
u
z
w
x
S
S
DR
(2)
Y-Momentum Equation:
v
t
u
v
x
v
v
y
w
v
z
g y
p
y
x
u
y
v
x
y
2
v
y
z
v
z
w
y
S
S
DR
(3)
23
Z-Momentum Equation:
w
t
u
w
x
v
w
y
w
w
z
g z
p
z
x
u
z
w
x
y
v
z
w
y
z
2
w
z
S
S
DR
(4)
There are two source terms in the above momentum equation one for rotating coordinates and the other for distributed resistances. The general form of distributed source term can be written as:
S
DR
K i f
D
H
V i
2
2
C V i
The k-factor in each momentum equation is unique with direction and is distributed equally for each momentum equation. Where ‘i’, represents global coordinates in each direction. The general form of rotating coordinates source term can be written as:
S
2 i
V i
i
i
r i
Where r is the distance from the axis of rotation and ω is the rotational speed. In the present case, the rotating source term is zero as the application involves only linear motion. For compressible flow, the general form energy equation in terms of total temperature is written as:
Energy Equation:
C p
T
0
t
V i
X
2
V i j
X
C p
V i
T
0
X i j
X i
V j
X j
X i
1
2 C
P
k
T
0
X i
X j
k
q
V
X j
V j
V
j
(5)
24
where “ ” is the dissipation function. The compressible flow equation has three additional terms compared to the incompressible equation.
In addition to the basic solver settings, a turbulence model was required to be incorporated, because of the unsteady, irregular motion of flow within the cylinder of the
IC engine. The Reynolds averaged Navier-Stokes (RANS) based on the standard
K [49] turbulence model was used with default values because the standard model is generally used for numerous applications and generally works quite well for most engineering applications. However, the separation points in the flow are not predicted accurately as required. The K turbulence model is generally used for high Reynolds number flows or flows where turbulence is more dominant in the flow regime.
3.2 Turbulence Model
The above governing 3-D time dependent equations are applicable for both laminar and as well as turbulent flows. However, due to the presence of infinite number of both time and length scales, which are required for turbulent flows. The solution of these governing equations requires huge number of finite elements to solve for a simple geometry and also require infinitesimally small time steps. For most practical applications, it is unreasonable to model the flow in this manner.
The need for such immense computer resources can be solved by averaging out the governing Partial differential equations over the time and length scales present.
There are many scale types available for averaging in the literature. Autodesk simulation solves the time averaged governing equations. The fluctuating velocity fields are characteristic of turbulent flows. The transported quantities such as momentum and energy mixes with this fluctuating quantity and causing transported quantities to
25
fluctuate as well. Since these fluctuating quantities are characterized by small length scales and thus, have high frequency spectrum. They are computationally expensive to simulate directly in practical applications due to high mesh density requirement. In order to overcome this problem, the exact governing partial differential equations are manipulated or time-averaged in order to remove the requirement of the small length scales. Thus, the equations are modified and are computationally less expensive to solve. These modified equations (equation [6-10]) contain additional unknown variables compared to the number of equations, and thus additional equations are required for the closure problem. Hence, the need for the turbulence models arises to determine these additional unknown variables in terms of the known quantities.
Continuity Equation
t
U
x
V
y
W
z
0 (6)
X-Momentum Equation
U
t
U
U
x
x
2
t
U
x
V
U
y
y
W
U
z
t
U
y
g x
V
x
P
x
S
z
S
DR
t
U
z
W
x
(7)
Y-Momentum Equation
V V
U
t x
x
t
U
y
V
V
x
V
y
W
y
V
z
g y
2
t
V
y
P
y
S
z
S
DR
t
V
z
W
y
(8)
26
Z-Momentum Equation
W
t
U
W
x
x
t
U
z
V
W
x
W
y
W
W
z
g z
y
t
V
z
P
z
S
W
y
S
DR
z
2
t
W
z
(9)
Energy Equation
C p
T
t
C p
U
x
k k t
T
x
T
x
y
C p
V
T
y
k k t
T
y
C p
W
T
z
z
k k t
T
z
q
V
(10)
The additional unknown variables are eddy viscosity ( t
) and eddy conductivity ( k t
) that needs to be determined.
Autodesk simulation CFD [9] solver provides many options for turbulence models. In the present simulation, the RANS model in Autodesk CFD based on standard K model [49] is considered as a more practical alternative to LES for predicting the flow at high Reynolds number. The unsteady RANS based on K model simulate the turbulent flow for the entire range of length scales in the flow domain.
3.2.1
RANS model based on standard K Model
The K model [49] uses the Boussinesq approach to relate mean velocity gradient to the Reynolds stresses of the flow. The present turbulence model used by
Autodesk simulation is a two-equation model with two unknown variables eddy conductivity and eddy viscosity. This model describes the two turbulent parameters, the
27
turbulent kinetic energy ( K ) and the turbulent energy dissipation ( ) of the flow. The two unknown variables eddy conductivity and eddy viscosity are determined using: k t
t
C p
t
t
C
K
2
Where the empirical constant C
=0.09 and turbulent Prandtl number t
1 . The turbulence model equations are derived from the moments of the momentum equations in terms of K and .
The generalized K turbulence model for high Reynolds number is written as equations (equation [11-12]):
Turbulent Kinetic Energy (TKE) Equation:
K
t
U
K
x
V
K
y
W
K
z
x
K t
K
x
y
t
K
K
y
z
K t
K
z
t
2
U
x
2
2
V
y
2
2
W
z
2
U
y
V
x
2
U
z
W
x
2
V
z
W
y
2
(11)
Turbulent Energy Dissipation (TED) Equation:
t
U
x
V
y
W
z
x
t
x
y
t
y
z
t
z
C
2
2
K
C
1
t
K
2
U
x
2
2
V
y
2
2
W
z
2
U
y
V
x
2
U
z
W
x
2
V
z
W
y
2
(12)
Where the empirical constants C
1
=1.44 and C
2
=1.92 and turbulent Schmidt numbers
K
=1 and
=1.3.
28
Autodesk CFD [9] provides three variants of K , i.e., the standard Renormalization group (RNG), low Re K and standard K models. These three model variants are similar in form but the major differences are as follows:
The method in which the turbulent viscosity is calculated
The way in which the turbulent Prandtl numbers governs the turbulent diffusion of
K and equations
The generation and destruction terms in the turbulent energy dissipation ( ) equation of the model
The relative low computational cost associated with the RANS model is beneficial for the present application. Autodesk CFD integrates the standard K model with wall-bounded functions. This concept really helps during the meshing stages of the simulation model. If the domain is meshed sufficiently fine near the wall to resolve the laminar sub-layer, the shear stress is then determined from the stress and strain equations. If the mesh is too coarse near the wall of the model, the law of the wall is employed.
3.2.2
Scalar Transport Equation
The generalized averaged scalar equation can be written as follows:
F
t
u
F
x
v
F
y
w
F
z
x
D t
F
x
y
D t
F
y
z
D t
F
z
(13)
The unknown variable, eddy diffusivity ( D t
) is calculated using eddy viscosity ( t
) and the turbulent Schmidt number ( t
):
29
D t
t t
.
Where the turbulent Schmidt number ( t
=1.0).
3.3 Boundary Conditions
Boundary conditions plays major role in influencing the accuracy of the flow prediction and convergence properties of the solution. The Autodesk CFD [9] solver uses a finite element discretization with solution points located on the boundaries of the elements. Autodesk CFD solver imposes the wall boundary conditions implicitly even for complex applications in order to improve the stability of the numerical scheme.
3.3.1 Pressure Boundary Condition
The Pressure boundary condition is typically used at inlet and outlet boundaries.
Autodesk CFD [9] recommends static gage pressure with a value of 0 at the outlet boundary. When applied, no other boundary conditions are needed at an outlet boundary. If the pressure drop across the inlet and outlet boundaries is known, a total gage pressure drop is specified, and a value of 0 static gage at the outlet. A non-zero value can be specified at the inlet condition. In the present simulation, inlet was assigned for 10 psig (total) and 0 psig (static) at the outlet for most of the cases of simulation.
3.3.2 Scalar Boundary Condition
Scalar is a dimensionless quantity ranging between 0 and 1 that represents the concentration of the scalar quantity for tracking concentrations. To simulate the mixing of two fluids, the scalar boundary condition is applied to track the relative concentrations of the two fluids. This is in addition to the typical flow boundary conditions required to
30
drive the flow. A single material is defined within the flow region, and is defined so that its properties depend on the scalar condition. In the present simulation, the scavenging process of Grail engine was carried out using two similar fluids. ‘0’ was assigned for the air medium and ‘1’ for the carbon-dioxide medium with diffusion coefficient of 0.16 cm
2
/s. This diffusion coefficient defines the mass diffusivity of the scalar quantity into the surrounding fluid.
3.3.3 Viscous Wall Boundary Condition
Wall boundary conditions are used to bound fluid and solid regions. In viscous flows, Autodesk CFD applies no-slip boundary condition at walls by default and a tangential velocity component can be specified in terms of the translational or rotational motion of the wall boundary. The no-slip condition of the flow, a zero pressure gradient, and adiabatic thermal condition are enforced for the viscous solid surface for current simulations. Autodesk CFD [9] automatically sets wall boundary conditions on all surfaces that are not defined as inlets, outlets, symmetry, slip, or unknown. It is not necessary to set a zero velocity (no-flow) condition at any fluid/solid interface.
3.4 Computational Set-Up
Simulations were conducted using the Navier-Stokes equations solver Autodesk simulation CFD [9]. This code is quite diverse and allows for a multi-block/zone grid option that is useful for an efficient execution in a parallel mode on a cluster. It provides a variety of higher-order spatial and explicit and implicit schemes. The time-averaged numerical simulation is carried out using the segregated implicit unsteady double precision solver. The prediction of in-cylinder turbulence is very sensitive to pressure and thus, the numerical diffusion usually found in the numerical schemes must be
31
reduced. Higher-order schemes have lower numerical diffusions. For this reason, higher-order schemes are preferable for IC engine computations.
The segregated solver used in this work employs a SIMPLE-R solution algorithm.
The finite element Galerkin's method of weighted residuals is used directly on the diffusion and source terms. However, for numerical stability, the advection terms are treated with upwind method along with the weighted integral method. Autodesk simulation uses four upwind methods depending upon the stability and application. In the present simulation, ADV1 monotone streamline upwind scheme is used. The pressure-implicit splitting of operators (PISO) pressure-velocity coupling scheme was applied to derive an equation for pressure from the discrete continuity equation. For compressible flow, the density-pressure coupling was considered.
For transient analyses, the transient terms are discretized using an implicit or backward difference method. A time step of 1x10
-4
seconds was selected with iterative time advancement scheme. Air was modeled as an ideal gas. The RANS model based on K turbulence model was employed as a numerical approach to simulate turbulence effects. The solution was carried out using the Autodesk CFD [9] enhanced wall treatment for compressible flows. The boundary-layer flow was assumed to be fully turbulent within the entire computational domain.
The in-cylinder simulation using RANS model based on K [9] viscous solver was applied using a second order implicit scheme. The pressure boundary conditions were applied both at the inlet and outlet. The flow was driven because of the pressure difference. The boundary conditions for the validation models were set up identical to the experimental conditions.
32
3.5 Moving Mesh in Autodesk CFD
The strategy that is applied to moving solids modeling in Autodesk CFD [9] is simple compared to other commercial solvers available in the market. In this solver, the fluid nodes that come in contact with the solid nodes are initialized with the instantaneous velocity at the point of contact and no-slip boundary condition is applied.
For any generalized motion, each moving part is assigned with local coordinate system and is assumed to be motionless with respect to local coordinate system. The global coordinate system is shown in Figure 3.1 and the local coordinate system of the moving part moves with respect to it. The global coordinates of any point on the moving solid is computed by using the following transformation.
x
z y t t
x y
z
x
x
t
z y
y z
o o o
x o y z o
o
Figure 3.1: Showing the co-ordinate system of moving solids [9] where (x, y, z) are the global coordinates computed at any time (t); ( o
, o
, o
) are the local co-ordinates of the moving part and are marked with a superscript ‘o’ to
33
indicate that there are computed only once at time zero. By definition, ( x
, y
, z
) are the components of the local x axis, ( x
, y
, z
) are the components of the local y axis, (
x
, y
, z
) are the components of the local z axis, and ( x o
, y o
, z o
) are the global position of the local coordinate system.
Autodesk CFD does not create dynamic meshing at each time level, instead it allows the solid mesh elements to pass through the fluid mesh elements. The velocity of each fluid mesh elements are then “masked” with the velocity of the closest solid mesh elements. Figure 3.2 shows the fluid mesh element marked with the arrow is being masked by the solid mesh element located at the corner of the moving part. The velocities of all the fluid mesh elements within the moving solid boundaries are controlled by the moving solid and are considered as masked.
Figure 3.2: Showing the Mesh “Masking” concept of Moving Mesh [9]
34
CHAPTER 4
VALIDATION STUDY
The finite element solver of Autodesk CFD is used in simulating the turbulence phenomenon of the two-stroke Grail engine design. Since Autodesk CFD finite element solver is new to IC engine application such as Grail engine, it is necessary to establish the present solver applicability to IC engine application and validate the solver with already established experimental models provided in the literature. The K two equation turbulence model of Autodesk CFD is used in present simulation. The two equation models are also called complete models because all the turbulence characteristics required to explain the turbulent viscosity are obtained from the transport equation. The K model is widely used model for simulating engines. In the mainstream industrial research, analyst prefer K model because of its less computational cost and sufficiently accurate results. The K model and its formulation in Autodesk CFD finite element solver is explained in great detail in Chapter
3.
4.1 Validations of Results and Discussion
In this section the results obtained by K model of Autodesk CFD finite element solver for turbulent flows are discussed. However, before understanding the turbulence phenomenon inside the cylinder of Grail engine two different flow validation models are considered: (1) the flow around a fixed valve as shown in Figure 4.1, and (2) the flow in a simple piston cylinder assembly with fixed open valve as shown in Figure
4.2. Among the two flow models considered in this section, the flow around a fixed valve
35
is the simplest one as it does not involve any moving component. The second flow model is more complicated and involves a fixed open valve and a moving piston.
Figure 4.1: Geometrical details of the validation model 1, dimensions are in mm
Figure 4.2: Geometrical details of the validation model 2, dimensions are in mm
36
4.2 Validation Model 1
The validation model 1 as shown in Figure 4.1 consists of an axis-symmetric sudden expansion with a stationary valve. The diameter of the downstream pipe is 3.5 times the upstream pipe. A constant mass flow rate of 0.05 kg/sec is provided at the inlet with a Reynolds number of 30,000. The results are validated by comparing the experimental Laser Doppler Anemometry (LDA) measurements data of Graftieux et. al.
[50]. Autodesk finite element solver is used to solve Reynolds averaged Navier-Stokes
(RANS) flow equations. RANS computations are performed using the Autodesk standard K turbulence model [49].
The RANS computations are performed on a full 3-D unstructured mesh, composed of 4.1 million elements, as shown in Figure 4.3. The 2-D slices of the mesh showing the boundary layer elements near the intake valve are shown in Figures 4.4 and 4.5 respectively. As seen in Figures 4.3 to 4.5 the mesh is clustered near the valve head and vicinity of valve head in order to properly simulate the vortices and limit the cpu time. The mesh consists of boundary layer elements near the wall and unstructured tetrahedral elements away from the wall. The region near the valve is refined using 3 layers auto-gradation mesh system of Autodesk. The wall function is used to calculate the wall distance and stresses near the wall in order to properly capture the boundary layer without much mesh requirements. The mesh resulted in the wall y+ value of 30 at the valve seat and at the valve head. Grid independent study is performed on this model and the results are presented in the appendix A.
The segregated finite element solver is used to discretize the governing equations. The diffusion and source terms are discretized using the shape function and
37
weighted integrals method. Monotone streamline upwind scheme (ADV1) is used to discretize the advection term. This upwind scheme is much more numerically stable for complex geometries and used for all the simulations.
The boundary condition of constant mass flow rate of 0.05 kg/sec is used at the inlet and a constant static atmospheric pressure applied on the downstream end of the model. Solid walls are considered as adiabatic and no slip.
In a typical IC engine, the large scale vortical fluid motion are developed downstream of the intake valve during the intake stroke of the engine. These vortical motions produced during the intake stroke are responsible for producing turbulence which in turn helps in better fuel-air mixing and better combustion efficiencies in the latter stages of the engine operation. This model helps in assessing the ability of the
Autodesk CFD solver to capture these vortices in sudden expansion geometry.
Figures 4.6 and 4.7 shows the profiles of the axial mean velocity and root-mean square (RMS) velocities at z=20 mm and z=70 mm respectively from the cylinder head.
The simulation RANS results are compared with the LDA measurements of Graftieux et. al. [50]. There is a good agreement between RANS and LDA data. The peaks of axial mean velocities at both axial locations due to the breakdown of the valve jet are better predicted by RANS. The sharp peaks of fluctuations (RMS velocities) are reasonably well captured by RANS computations. The peaks are little bit diffused and position of the peak is also little offset. The discrepancy between the numerical and experimental data in the region close to the cylinder wall can be attributed to the wall model used in the Autodesk finite element solver. But overall, the RANS K model of Autodesk
CFD performs well in capturing the turbulence data.
38
Figure 4.8 shows the velocity vectors contour plot and confirms the generation of large scale vortical fluid motions downstream of the valve and in the corners of the cylinder head and cylinder wall. The fluid jet accelerating around the valve enters the cylinder and hits the cylinder walls, separating the flow into three regions. The vortices are formed at the corners of the cylinder near the cylinder head on either side and the reflected part near the wall creates the wake like flow structures. Figure 4.9 [52] showing the flow structures validate the velocity vector contour plot as shown in Figure
4.6 from the present simulation.
Figure 4.3: 3-D Mesh for Validation Model 1
39
Figure 4.4: 2-D Slice of mesh for Validation Model 1
Figure 4.5: 2-D Slice of Mesh showing Boundary layer Elements
40
Mean Axial Velocity at z=20
15
10
5
0
-5
0 0.5
r/R
mm
1
Exp
(Graftieux et.al) k-ε model
(Autodesk)
5
4
3
2
1
0
6
RMS Axial Velocity at z = 20 mm
Exp (Graftieux et.al)
0 0.5
1 k-ε model
(Autodesk) r/R
Figure 4.6: Axial Velocity Profiles at z = 20 mm for Validation Model 1
Mean Axial Velocity at z=70 mm
15
10
-5
-10
5
0
0 0.5
r/R
1
Exp (Graftieux et.al) k-ε model
(Autodesk)
4
3
2
1
0
6
RMS Axial Velocity at z = 70 mm
5
Exp (Graftieux et.al)
0 0.5
1 k-ε model
(Autodesk) r/R
Figure 4.7: Axial Velocity Profiles at z = 70 mm for Validation Model 1
41
Figure 4.8: Velocity Vector Contour Plot for Validation Model 1
Figure 4.9: Streamlines Showing Flow Structures [52]
42
4.3 Validation model 2
The validation model 2 as shown in Figure 4.2 is a simple piston-cylinder assembly with a stationary open valve. The selected flow was particularly suitable for understanding the in-cylinder flow dynamics and validation of Autodesk CFD solver procedure to such complex geometries with moving boundaries and K turbulence model capability to capture the turbulence. The geometrical details of the model are shown in Table 4.1. The model has a stationary open valve with the piston moving in simple harmonic motion with a low RPM of 200. The flow Reynolds number calculated based on the cylinder diameter and piston motion is 2000. The mean piston velocity
(Vp) calculated is 0.4 m/sec and is used to plot the non-dimensional velocity profile in the results.
The experimental data were available for the validation of the numerical results.
In particular, Morse et al. [51] used LDA to measure phase-averaged mean and rms radial profiles of axial velocity at 10 mm increments starting from the cylinder head for crank angles 36 deg and 144 deg after top dead center (ATDC).
Figure 4.10 shows the 3-D unstructured mesh with 6.6 million elements used in the simulation of validation model 2. The 2-D Slices of the mesh showing the clustered mesh region near the valve and the piston are shown in Figures 4.11 and 4.12 respectively. Since the model involves moving piston the mesh strategies of moving mesh of Autodesk CFD are used in the simulation. Autodesk simulation uses different kind of moving mesh technique compared to dynamic mesh. The technique used is called “masking”. This technique correlates the interaction between moving solids and the fluid through which the solids move by masking the fluid nodes with that of solid
43
nodes, meaning that the velocity on those nodes is governed by the motion of the solid.
The mesh density of a moving solid and the fluid in its path must be sufficiently dense to sense the interaction between the solid and the fluid. The mesh size used on the surface of the piston is 0.09 and fluid mesh size of 0.1 resulting in the mesh of 6.6 million elements. The wall function is used and resulted in the wall y+ value of 30 in the region of valve and the piston.
The segregated finite element solver is used to discretize the governing equations. The RANS K model is used to solve governing equations. A time step of
0.001 seconds was selected with 10 internal iterations to produce a converged solution.
Air was modeled as an ideal gas. ADV1 scheme which is more numerically stable is used to discretize the advection term. The boundary condition of a constant static atmospheric pressure applied on the intake of the model. Solid walls are considered as adiabatic and no slip. The piston was assigned with the linear motion moving with 200
RPM.
Figures 4.13 to 4.15 shows the comparison between the numerical and experimental mean and rms radial profiles of axial velocity at the crank angle of 36 deg after top dead center (TDC) at z = 10 mm, z = 20 mm and z = 30 mm respectively from the cylinder head. The numerical results are in good agreement with the experimental data of Morse et. al. [25]. It is clear from the Figures that the mean profiles are better predicted by RANS K model. However, the rms profiles are reasonably well captured by the model. The peaks of rms profiles are little flat because of the more dissipative nature of the turbulence model, which tends to smooth out all velocity gradients. Figures 4.16 to 4.18 shows the same profiles as Figures 4.13 to 4.15 but for
44
a crank angle of 144 deg after TDC, and again the results are very satisfactory. The same quality of agreement is obtained for the profiles at different crank angles. A very important point to be noted is that the flow has very strong variation from cycle to cycle and this variation on the velocity profiles should also be considered.
As the piston moves down, jet enters the cylinder through the annular gap between the valve and the cylinder head. This high speed jet impinges on the side of the cylinder wall and separates the flow into vortical flow structures due to viscous effects. The flow becomes completely dominated by the vortices, which grows in size as the piston moves down. Figures 4.19 and 4.20 shows the velocity vector plots at crank angle of 90 deg and 180 deg respectively obtained from the RANS K model and demonstrates the above phenomenon. These figures are compared with the large Eddy simulation (LES) of the same model at the same crank angles carried out by Verzicco et. al. [53] and are shown in Figures 4.21 and 4.22 respectively. The flow structures from both simulations are in good agreement except you find more small flow structures in the LES simulation, as expected.
To further quantify the turbulence parameter and to check the ability of Autodesk
CFD solver, the distribution of turbulent kinetic energy inside the cylinder has been investigate. Figure 4.23 shows the turbulent kinetic energy (TKE) profiles at crank angle of 90 deg at axial position of z = 10 mm, 20 mm and 30 mm respectively. Figure 4.23 shows that the intensity of the turbulent kinetic energy is maximum for the axial position z = 10 mm. This can be explained by the fact that this region is close to the jet flow formation where the flow motion is disorganized. Figure 4.24 shows the TKE at crank angle of 180 deg at the same axial locations. It is clearly observed that the intensity of
45
TKE becomes weak and there is a change in peak position. The amplitude of turbulence is increasing from the cylinder lateral wall to the symmetry axis. This TKE turbulence parameter is used in the study of the Grail engine to quantify the turbulence inside the cylinder.
Table 4.1: Geometrical Details of Validation Model 2
Bore
Stroke
Compression
Ratio
Valve OD
Annulus OD
Seat Angle piston Motion
RPM
Reynolds number (b) b=2R
S
(S+C):C
Z
2r v
2r a
α p
(t)
Ω
ΩSR/15ν
75 mm
60 mm
3:1
33.6 mm
41.6 mm
60
Simple
Harmonic
200
2000
Figure 4.10: 3-D Mesh for Validation Model 2
46
Figure 4.11: 2-D Slice Mesh for Validation Model 2
Figure 4.12: 2-D Slice Mesh for Validation Model 2
47
10
8
6
0
-2
4
2
-4
0
Mean Axial Velocity for 36 deg
CA at z = 10 mm
20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
4
RMS Axial velocity for 36 deg
CA at z = 10 mm
3
2
1
0
0 20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
Figure 4.13: Axial Velocity Profiles for 36 deg CA at z = 10 mm for Validation Model 2
10
8
6
0
-2
4
2
0
Mean Axial Velocity for 36 deg
CA at z = 20 mm
20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
3
2
4
RMS Axial Velocity for 36 deg
CA at z = 20 mm
Exp (Morse et.al) k-ε model
(Autodesk) 1
0
0 20 r (mm)
40
Figure 4.14: Axial Velocity Profiles for 36 deg CA at z = 20 mm for Validation Model 2
10
8
6
4
2
0
-2
0
Mean Axial Velocity for 36 deg
CA at z = 30 mm
20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
4
RMS Axial Velocity for 36 CA at z = 30 mm
3
2
1
0
0 20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
Figure 4.15: Axial Velocity Profiles for 36 deg CA at z = 30 mm for Validation Model 2
48
10
Mean Axial Velocity for 144 deg CA at z = 10 mm
5
0
-5
-10
0 20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
5
RMS Axial Velocity for 144 deg
CA at z = 10 mm
4
3
2
1
0
0 20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
Figure 4.16: Axial Velocity Profiles for 144 deg CA at z = 10 mm for Validation Model 2
10
Mean Axial Velocity for 144 deg CA at z = 20 mm
5
0
-5
-10
0 20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
5
RMS Axial Velocity for 144 deg
CA at z = 20 mm
4
3
2
1
Exp (Morse et.al) k-ε model
(Autodesk)
0
0 20 r (mm)
40
Figure 4.17: Axial Velocity Profiles for 144 deg CA at z = 20 mm for Validation Model 2
10
Mean Axial Velocity for 144 deg CA at z = 30 mm
5
0
-5
-10
0 20 r (mm)
40
Exp (Morse et.al) k-ε model
(Autodesk)
5
4
3
2
1
0
0
RMS Axial Velocity for 144 CA at z = 30 mm
40 20 r (mm)
Exp (Morse et.al) k-ε model
(Autodesk)
Figure 4.18: Axial Velocity Profiles for 144 deg CA at z = 30 mm for Validation Model 2
49
Figure 4.19: RANS Velocity Vector Contour Plot at 90 deg for Validation Model 2
Figure 4.20: RANS Velocity Vector Contour Plot at 180 deg for Validation Model 2
50
Figure 4.21: LES Velocity Vector Contour Plot at 90 deg for Validation Model 2 [53]
Figure 4.22: LES Velocity Vector Contour Plot at 180 deg for Validation Model 2 [53]
51
Turbulent Kinetic Energy for
Theta 90 deg
0.04
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
0 10 20
TKE (m2/s2)
30 40
X=10 mm x=20 mm x=30 mm
Figure 4.23: TKE Profiles at 90 deg for Validation Model 2
0.04
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
0
Turbulent Kinetic Energy for
Theta 180 deg
0.1
0.2
0.3
0.4
0.5
0.6
0.7
TKE (m2/s2) x=10 mm x=20 mm x=30 mm
Figure 4.24: TKE Profiles at 180 deg for Validation Model 2
52
CHAPTER 5
GRAIL ENGINE STATIC SIMULATIONS STUDY
Autodesk CFD [9] finite element solver is used in simulating the turbulence phenomenon of the two-stroke Grail engine design. The K two equation turbulence model of Autodesk CFD is used in present simulations. At the initial stages of the study, stationary simulation of in-cylinder flow dynamics and the flow in a complete Grail engine is investigated. The flow is analyzed and proper changes were made in the next iterative design of the Grail engine. In the latter part of the study, the dynamic motion analysis of the two-stroke Grail engine was carried out for the complete two-stroke cycle. The results were validated with the limited experimental data available. In the final stage of the study, simulation of the scavenging effect of the Grail engine was carried out using the scalar model of Autodesk CFD [9]. The results of all the cases are presented in this chapter.
5.1 Stationary Grail Engine In-Cylinder Flow Dynamics
Two cases were investigated in the stationary Grail engine in-cylinder flow dynamics. Both of these cases are inter-related and the effect of each on the other is studied by having one case fixed. The first case was related to the hole that can be made in the head of the piston for the intake air inside the combustion chamber. The second case was related to the shape of the tubes that can be used below the piston for the intake runners from the reed valve to the intake valve. Two cases are presented below. The inlet was applied with 10 psig total pressure boundary and the outlet was applied with 0 psig static pressure boundary. The wall boundary was treated with no-slip condition.
53
5.1.1 Study of Piston Holes
Figure 5.1 shows the geometry of the 5 types of hole configuration inside the piston head for a given D-tube channel of the Grail engine. These holes are made in such a way to provide directional effect to the flow that enters inside the cylinder of the engine. The effect of the hole sizes on the pressure, the directionality of the flow and the volumetric flow rate has been studied. Figure 5.1 (a) shows the original hole configuration with a hole diameter of 0.4375 inch resulted in total area of 0.60132 in
2
.
Figure 5.1 (b) shows the medium hole configuration with a hole diameter of 0.6 inch resulted in total area of 1.13 in
2
. Figure 5.1 (c) shows the large hole configuration with a hole diameter of 0.85 inch resulted in total area of 2.26 in
2
. Figure 5.1 (d) shows the 6 hole configuration with a hole diameter of 0.3 inch resulted in total area of 0.848 in
2
.
Figure 5.1 (e) shows the rectangular hole configuration with l x b of 1.19 x 0.459 inch resulted in total area of 1.09242 in
2
.
Figure 5.2 illustrates the 2-D plane slices with unstructured mesh ranging from
0.7 to 1.2 million elements. The RANS computations were performed on a full 3-D unstructured mesh as shown in Figure 5.2. As seen in Figures 5.2 the mesh is clustered near the intake valve and the region close to exhaust valve in order to properly capture the vortices and limit the cpu time. The mesh consists of unstructured tetrahedral elements away from the wall. The wall function is used to calculate the wall distance and stresses near the wall in order to properly capture the boundary layer without much mesh requirements. The mesh resulted in the wall y+ value of 30 which is sufficient to identify the flow structures necessary in the present study.
54
Figure 5.3 shows the velocity vector contour plot for all type of holes configuration. The vortices formed near the intake valve were clearly seen in the Figure
5.3. Figures 5.3 (a, d, e) shows the symmetry of vortices on either edges of the intake valve. While, the velocity is much more diffused in the center of the intake and exhaust valves in the cases seen in Figures (b, c). The darker region of velocity at the center of the intake and exhaust valves for cases shown in Figures (a, d, e) shows the structure of the tornado in 2-D plane.
Figure 5.4 shows the pressure contour plot for all the types of hole configurations. The pressure variation just below the intake valve from various type of hole configurations were studied. Since any pressure loss that occurs due to change in shape or size of the hole directly effects the energy needed to provide the pressure for two-stroke Grail engine. It is observed from the figures 5.4 that the pressure variation for different hole configuration is relatively small. However, the rectangular hole configuration provides the minimal pressure loss as seen in Figure 5.4 (e).
Figure 5.5 shows the iso-velocity vector for all the hole type configurations. It is clearly observed from the Figure 5.5 the swirl/tornado effect of flow inside the cylinder of
Grail engine. The swirl/tornado effect is strong and centered on the intake and exhaust valves for the original, 6, rectangular hole configurations as shown in Figures 5.5 (a, d, e). The swirl/tornado effect is not seen in the medium, large hole configurations as shown in Figure 5.5 (b, c) which is mostly dominated by tumble motion.
Table 5.1 presents the mass and volumetric flow rates for all the hole configurations. Depending on the above simulation flow results and optimal values of mass and volumetric flow rate we suggested the rectangular hole configuration for the
55
next generation Grail piston head design. The swirl effect of the flow with a single vortex centered at the center of the cylinder as shown in Figure 5.5 (e) and the tumble effect of the flow with velocity vectors on the plane as shown in Figure 5.3 (e) for the rectangular hole configuration. This resultant flow field from the rectangular hole configuration of
Grail engine design will enable an ideal homogeneous/stoichiometric fuel-air mixture for higher combustion efficiency.
(a) Original Hole Configuration (b) Medium Hole Configuration
(c) Large Hole Configuration (d) 6 Hole Configuration
Figure 5.1: Geometry showing 5 types of Hole Configuration inside the Grail
Piston Head
56
(e) Rectangular Hole Configuration
Figure 5.1: (continued)
(a) Original Hole Configuration (b) Medium Hole Configuration
Figure 5.2: 2-D Plane Slices showing Mesh for 5 types of Hole Configuration inside the Grail Piston Head
57
(c) Large Hole Configuration (d) 6 Hole Configuration
(e) Rectangular Hole Configuration
Figure 5.2: (continued)
58
(a) Original Hole Configuration (b) Medium Hole Configuration
(c) Large Hole Configuration (d) 6 Hole Configuration
Figure 5.3: Velocity Vector Contour plot for 5 types of Hole Configuration inside the
Grail Piston Head
59
(e) Rectangular Hole Configuration
Figure 5.3: (continued)
(a) Original Hole Configuration (b) Medium Hole Configuration
Figure 5.4: Pressure Contour Plot for 5 types of Hole Configuration inside the
Grail Piston Head
60
(c) Large Hole Configuration (d) 6 Hole Configuration
(e) Rectangular Hole Configuration
Figure 5.4: (continued)
61
(a) Original Hole Configuration (b) Medium Hole Configuration
(c) Large Hole Configuration (d) 6 Hole Configuration
Figure 5.5: Iso-Velocity Vectors for 5 types of Hole Configuration inside the Grail
Piston Head
62
(e) Rectangular Hole Configuration
Figure 5.5: (continued)
Table 5.1: Mass and Volumetric Flow Rate
Model Original Medium Large
6 holes
Mass Flow
Rate (lbm/min) 17.05 24.95 26.4 18.18
Volume Flow
Rate (FCPM) 177.89 229.58 234.87 187.46
Rectangular
Hole
20.89
199.94
5.1.2 Study of Piston Tube Channels
The GEN-2 Grail engine cold tests provided valuable information of the potential engine operation as well as the design challenges that must be overcome to develop a consistently functional engine. The obvious finding in the engine design is that the air intake towers must be sealed in some conventional manner. One of the unique attributes of the Grail cycle engine is that the separation of the intake air from the crankcase will eliminate oil mist cross contamination from the combustion chamber thus, reducing overall engine emissions. Three tube configurations were identified and are listed as follows:
63
1. Single Tube Configuration
2. Dual Tube Configuration
3. D-Tube Configuration
To fully understand the dynamics and flow behavior of each tower configuration, static Computational Fluid Dynamics (CFD) test scenarios were performed. Figure 5.6 shows the geometry of the 3 types of tube configuration below the piston head for a given rectangular hole of the Grail engine. Figure 5.6 (a) shows the single tube configuration with a total area of 0.277 in
2
. Figure 5.6 (b) shows the dual tube configuration with a total area of 0.554 in
2
. Figure 5.6 (c) shows the D-tube configuration with a total area of 1.66 in
2
. The length of all the tube configurations is 3.5 inches.
Figures 5.7-5.9 shows both the 3-D and 2-D plane slices with unstructured mesh of 2.4 million elements. As seen in Figures 5.7-5.9 the mesh is clustered near the intake valve and the region close to exhaust valve in order to properly catch the vortices and limit the cpu time. The mesh consists of unstructured tetrahedral elements away from the wall. The mesh resulted in the wall y+ value of 30.
Figure 5.10 shows the velocity vector contour plot for all type of tube configuration at YZ and XZ planes. The vortices formed near the intake valve were clearly seen in the Figure 5.10. Figure 5.10 show the formation of tumble vortices on either edges of the intake valve. Several small vortices in the XZ plane of the cylinder for all tube configurations were observed.
Figure 5.11 shows the pressure contour plot for all three tube configurations. The pressure variation from engine intake tube channels to piston tube channels below the piston head for various type of tube configurations were studied. Since pressure
64
induction takes from an external source in Grail engine any pressure loss that occurs due to change in shape or size of the tube directly relates to energy loss for two-stroke
Grail engine. It is observed from the figure 5.11 (a, b) the pressure drop for single and dual tube configuration is approximately 4-5 psig from the original 10 psig. However, the
D-tube configuration provides the minimal pressure loss as seen in Figure 5.11 (c).
Figure 5.12 shows the iso-velocity vector for all the tube type configurations. It is clearly observed from the Figure 5.12 (c) the swirl/tornado effect of flow inside the cylinder of Grail engine starting to take place for the D-tube configuration. The swirl flow during the intake stage of the flow is always desirable [48]. For the single and dual tubes the flow is dominated by tumble vortices as seen in Figure 5.12 (a, b).
Each configuration offers advantages and disadvantages depending on different parameters involved in solving the Grail cycle intake tower sealing. The optimal intake tower solution that yields the highest air mass flow rate and pressure loss efficiency is the D-tube Tower configuration. Unfortunately, this design lends itself to be the most difficult to seal primarily due to its shape. The sealing for D-shape tube is difficult to find in the market and they are available on custom orders which are costly compared to the sealing readily available in the market.
The Dual tube solution offers secondary improvement in mass flow rate and volumetric efficiency. However, the position of the dual towers offset from the piston centerline will prove a challenge in the wear of intake tube seal rings as the piston tends to “rock” about its wrist pin axis as it travels downward after spark ignition occurs. The
Single tube tower configuration offers the best chance of sealing the intake air via use of traditional piston rings and the position of the tubes located along the center of the
65
piston will minimize piston rocking interference and wear. It’s mass flow rate and volumetric efficiency is less desirable than the other configurations noted in this document, but it does offer the opportunity to provide a Grail cycle engine design with pre-pressurized intake runners that separate the intake air from crankcase air at present for cold run testing of the engine.
(a) Single Tube Configuration (b) Dual Tube Configuration
(c) D-Tube Configuration
Figure 5.6: Geometry showing 3 types of Tube Configuration
66
(a) 3-D Unstructured Mesh
(b) 2-D Plane Slices showing Mesh
Figure 5.7: Geometry showing Mesh for one Tube Configuration
67
(a) 3-D Unstructured Mesh
(b) 2-D Plane Slices showing mesh
Figure 5.8: Geometry showing Mesh for Dual Tube Configuration
68
(a) 3-D Unstructured Mesh
(b) 2-D Plane Slices showing mesh
Figure 5.9: Geometry showing Mesh for D-Tube Configuration
69
(a) One Tube Configuration
(b) Dual Tube Configuration
Figure 5.10: Velocity Vector Contour plot at YZ and XZ Plane for 3 types of Tube
Configuration
70
(c) D-Tube Configuration
Figure 5.10: (continued)
(a) One Tube Configuration
Figure 5.11: Pressure Contour plot at YZ and XY Plane for 3 types of Tube
Configuration
71
(b) Dual Tube Configuration
(c) D-Tube Configuration
Figure 5.11: (continued)
72
(a) Single Tube Configuration (b) Dual Tube Configuration
(c) D-Tube Configuration
Figure 5.12: Iso-Velocity Vectors for 3 types of Tube Configuration
5.2 Stationary Complete Engine Flow Dynamics
Two types of engine configurations were analyzed. The first type is a GEN 1 engine which has an engine intake reed valve setup in such a way that the engine intake air enters from the topsigde of the engine as shown in Figure 5.13 (a). The second type is a GEN 2 engine which has an engine intake reed valve setup in such a way that the engine intake air enters from the side of the engine as shown in Figure
73
5.13 (b). Numerical simulation was carried out with an inlet pressure of 10 psig (total) and outlet pressure of 0 psig (static). This simulation of GEN 1 and GEN 2 engines will provide a good insight into airflow, pressure drops, and necessary improvements needed.
Figures 5.14-5.15 shows both the 3-D and 2-D slice mesh for GEN 1 and GEN 2 engine configurations. GEN 1 engine was meshed with a 3-D tetrahedral of 0.9 million elements. GEN 2 engine was meshed with 1.2 million tetrahedral elements. The mesh is both engines were clustered near the valve and the wall of the cylinder as shown in
Figures 5.14-5.15 (b). Autodesk CFD wall model was used resulting in a y+ value of 30 in the present simulation.
Figure 5.16 shows the velocity contour plot for both engine configurations. It is clearly observed that the flow is accelerated near the bend of GEN 1 engine, which results in low pressure after the bend. However, in the case of GEN 2 engine the flow is much more uniform throughout the tube channel. Figure 5.17 shows the pressure contour plot for both the engine configurations. There is a pressure drop of 4 psig through the intake runners for the GEN 1 engine compared to the 1 psig drop in the
GEN 2 engine.
74
(a) GEN 1 Engine (b) GEN 2 Engine
Figure 5.13: Geometry showing 2 types of Engine Configuration
(a) 3-D Unstructured Mesh
Figure 5.14: Geometry showing Mesh for GEN 1 Engine Configuration
75
(b) 2-D Plane Slices showing mesh
Figure 5.14: (continued)
(a) 3-D Unstructured mesh
Figure 5.15: Geometry showing Mesh for GEN 2 Engine Configuration
76
(b) 2-D Plane Slices showing mesh
Figure 5.15: (continued)
(a) GEN 1 Engine (b) GEN 2 Engine
Figure 5.16: Velocity Vector Contour plot for 2 types of Engine Configuration
77
(a) GEN 1 Engine (b) GEN 2 Engine
Figure 5.17: Pressure Contour plot for 2 types of Engine Configuration
78
CHAPTER 6
GRAIL ENGINE DYNAMIC SIMULATIONS STUDY
Autodesk CFD [9] finite element solver was used in simulating the turbulence phenomenon of the two-stroke Grail engine design. The K two equation turbulence model of Autodesk CFD was used in present dynamic simulation. The dynamic motion analysis of the two-stroke Grail engine was carried out by analyzing the engine in three stages. In the first stage, the study of the in-cylinder flow field was carried out only during the induction stage i.e., with inlet valve motion. In the second stage, study of incylinder flow field with the complete Grail engine cycle was carried out. In the final stage, the scavenging phenomenon of the Grail engine cycle was demonstrated. The results were validated with the limited experimental data available. The results of all the dynamic stages are presented in this chapter.
6.1 Inlet Valve Motion Grail Engine In-Cylinder Flow Dynamics
The purpose of the simulation to be discussed here was to visualize the flow structure as a whole and obtain a complete picture of flow field during the important induction process. Turbulence was almost exclusively generated during the induction process [11]. High shear flow during the induction process was the source of turbulence in all the internal combustion engines and this very nature of the flow was demonstrated in the figures obtained from the present numerical simulation. The inlet was applied with
10 psig total pressure boundary and the outlet was applied with 0 psig static pressure boundary. The wall boundary was treated with no-slip condition.
79
6.1.1 Simulation Description
Figure 6.1 shows the geometry of the rectangular hole configuration inside the piston head for a given D-tube channel of the Grail engine. The dimensions of the rectangular hole configuration was l x b of 1.19 x 0.459 inch resulted in total area of
1.09242 in
2
. Figure 6.2 shows the 2-D plane slices with unstructured mesh of 3.2 million elements. The RANS K turbulence model was used to perform computation on a full 3-D unstructured mesh as shown in Figure 6.2.
As seen in Figure 6.2, the mesh was clustered near the intake valve in order to accommodate the inlet valve motion. The technique used in moving mesh was called masking. As the moving solid elements passes through the fluid element nodes, its elements were masked by the fluid nodes i.e., the velocity on those nodes was governed by the motion of solid elements. The geometry was meshed with unstructured tetrahedral elements away from the wall. The wall function was used to calculate the wall distance and stresses near the wall in order to properly capture the boundary layer without much mesh requirements. The mesh resulted in the wall y+ value of 30 which was sufficient to capture the flow structures necessary in the present study.
At the start of the simulation, the inlet valve was in closed position and the exhaust valve was in open position. Both the inlet and exhaust valves were opened to
0.25 inch at complete open position. Linear motion boundary was applied to the inlet valve which opens from 0 to 0.25 inch. The flow takes place due to the pressure difference between the inlet and outlet boundaries. The two D-tube intake runners were applied with the inlet total pressure of 10 psig. The exhaust tube on the top of the cylinder was applied with the outlet static pressure of 0 psig (atmospheric).
80
Figure 6.1: Geometry showing rectangular Hole with D-tube Configuration inside the
Grail Piston Head
Figure 6.2: 2-D Plane Slices showing Mesh for rectangular Hole with D-tube
Configuration inside the Grail Piston Head
6.1.2 Simulation Results
Figure 6.3 demonstrates the flow structures during the induction stage of the twostroke Grail engine cylinder. The velocity vectors shown in Figure 6.3 (a) demonstrates the flow field when the inlet valve was in closed position. The velocity vectors in Figure
6.3 (b) shows the start of flow due to pressure difference between the inlet and outlet boundaries. The jet flow through the inlet valve just after the inlet valve was opened is
81
shown in Figure 6.3 (c), produces large toroidal symmetrical vortex structures in the cylinder of the engine. These vortex structures formed are of the scale as the cylinder itself and are very predictable from cycle to cycle.
Figure 6.3 (d) demonstrates the flow field after sometime was passed. The vortex structures formed near the intake valve travels away from the intake valve with time.
This numerically simulated flow field results are validated with the visualization photos obtained from the hot-wire anemometry experimental data [54] as shown in Figure 6.4.
Similar flow field structures are observed in both numerical and experimental photos.
Figure 6.3 (a) also demonstrates the pressure contour plot with 10 psig at inlet and 0 psig at outlet. Figure 6.5 shows the turbulent kinetic energy (TKE) profiles at bottom dead center (BDC) at axial position of near the inlet valve, center of the inlet and exhaust valves and near the exhaust valve respectively. Figure 6.5 shows that the intensity of the turbulent kinetic energy is maximum near the inlet valve. This can be explained by the fact that this region was close to the jet flow formation, where the flow motion was disorganized. It was clearly observed that the intensity of TKE becomes weak away from the intake valve. The amplitude of turbulence was increasing from the symmetry axis to the cylinder lateral wall.
82
(a) Inlet-Valve Close (b) Inlet-Valve just opened
(c) Inlet-Valve after opening (d) Inlet-Valve opened for sometime
Figure 6.3: Pressure Velocity Vector Plot for rectangular Hole with D-tube Configuration inside the Grail Piston Head
83
Figure 6.4: In-cylinder Vortex Structures [54]
Turbulent Kinetic Energy At BDC
-100
0.1
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
0
Inlet center outlet
100 200 300 400 500
TKE (m 2 /s 2 )
Figure 6.5: TKE Plot for rectangular Hole with D-tube Configuration inside the Grail
Piston Head
84
6.2 Complete Grail Engine Motion In-Cylinder Flow Dynamics
The purpose of the simulation to be discussed here is to visualize the flow structure as a whole and obtain a complete picture of flow field during the complete twostroke Grail engine process. In-cylinder fluid flow dynamics in Spark-ignition (SI) engines plays a vital role during combustion process. Engine performance and emissions of a spark-ignition (SI) engine are dependent on the stratified fuel-air distribution inside the cylinder. The efficiency of a SI engine depends on the stratified mixture preparation and its distribution inside the combustion chamber. All the above parameters are based on the interaction of the in-cylinder flow structures such as swirl, squish, tumble and turbulence of the flow field.
Due to the limitation of computational capability and the mesh generation methodology above studies have been concentrated on obtaining the turbulence kinetic energy parameter, compression pressure and the flow field of the Grail engine during the intake and compression strokes of the engine. These preliminary results provide insight into the flow field dynamics of the new two-stroke Grail engine design and helps in designing future generation models.
6.2.1 Simulation Description
Grail engine model studied is a new engine design with a single-cylinder spark ignition (SI) engine with one intake valve located at the center of the piston and exhaust valve located at the center of the cylinder head as shown in Figure 6.6 and equipped with piston as depicted in Figure 6.6. The piston crown is considered to investigate the behavior and pattern of swirl, tumble and turbulence intensity field occurring inside the cylinder in order to study the flow field dynamics of Grail engine. The piston shape is
85
representative of the real Grail engine geometry model that usually operated to obtain the higher compression ratio as well as the optimum combustion process in a Grail engine.
Table 6.1 provides the operating conditions and the specifications of the Grail engine model used in the present CFD analysis during the intake and compression stroke of the engine. Grail engine is a typical two-stroke automotive engine with direct injection system. The fuel injector is located on the cylinder head at 45 deg angle inside the combustion chamber and multiple spark plugs were positioned around the vicinity area of it to provide the homogeneous mixture and rapid combustion process. Grail engine design restricts the RPM of the engine with maximum RPM targeted around
2000. Turbulence of the internal combustion engine increases with RPM [11].
Therefore, the present CFD simulation study is carried out at low engine speed of 500
RPM.
The computational domain for the CFD calculation covers the intake port, intake valve, exhaust port, exhaust valve, the cylinder head and the piston as shown in Figure
6.7. Higher mesh densities were generated near the valve seat region. The mesh grid generation was carried out in three steps. In the first step, the computational domain was divided into small logical blocks. Because of the complexities of geometry, each block was considered carefully. Since the physical quantities such as velocities, pressure, turbulent intensities etc, change significantly at the valve seat region special care was taken for more accurate calculation.
In the second step, the computational grid was generated on each face of block.
In the final step, full mesh generation of 3-D volume was carried out. The process of
86
mesh generation was quite intensive and time consuming due to the complexities of
Grail engine geometry and the un-structured mesh requirement. The tetrahedral mesh of 5 million elements was generated. Half of the cells were used to generate the mesh at the cylinder head and piston considering the grid sensitivity and reasonable computer run time. The fine grid structure was necessary for moving mesh during the valve and piston motion.
At the start of the simulation, the inlet valve was in open position and the exhaust valve was also in open position. Both the inlet and exhaust valves were opened to 0.25 inch at complete open position. Linear motion boundary was applied to both inlet and exhaust valve which opens from 0 to 0.25 inch. The inlet and exhaust valve timings used in the present simulation is shown in Figure 6.8. Grail engine cylinder volume variation with the crank angle is shown in Figure 6.9 for one complete cycle. The piston was applied with linear sinusoidal motion with a speed of 500 RPM. Since the intake valve was located inside the piston, the motion of intake valve was inter-dependent on the motion of the piston itself. A small program was written to correlate this motion. The flow takes place due to the pressure difference between the inlet and outlet boundaries.
The intake runners were applied with the inlet total pressure of 10 psig. The exhaust tube on the top of the cylinder was applied with the outlet static pressure of 0 psig
(atmospheric).
87
Figure 6.6: Geometry showing Grail Engine Model with Piston Crown
Table 6.1: Specifications of Grail Engine Model for CFD Analysis
Engine Parameters
Number of cylinders
Engine Type
Displacement Volume
(in3)
Bore (in)
Stroke (in)
Connecting rod length (in)
Crank radius (in)
Compression ratio
Maximum intake valve lift
(in)
Maximum exhaust valve lift (in)
Value
1 two-stroke
36.08644844
3.8
3
5
1.5
15.06
0.25
0.25
88
(a) 3-D Unstructured Mesh
(b) 2-D Plane Slices showing mesh
Figure 6.7: Geometry showing Mesh for Grail Engine Model
89
Figure 6.8: Valve Timing of Grail Engine
-200
Grail Cylinder Volume with
Crank Angle
40
35
30
25
20
15
10
5
0
-100 0 100
Crank Angle (in Deg)
200
Grail Cylinder
Volume
Figure 6.9: Plot Showing Grail Engine Cylinder Volume with Crank Angle
90
6.2.2 Simulation Results
The detailed investigation of the Grail engine model on the fluid flow field and turbulence characteristics for a two-stroke direct injection engine under motoring condition has been carried out. The results are presented here in two important sections for fluid flow field and turbulence characteristics, which are completed with its discussions for the Grail piston shape. The in-cylinder flow structures such as swirl and tumble are generated in the combustion chamber during the intake stroke due to intake manifold design, intake valve, and piston shape. Tumble flow structures are more crucial for modern direct injection SI engines than the swirl flow for proper mixing of fuel and air, and spark propagation rate especially during the compression stroke of the engine. Therefore, this study is focused on the in-cylinder turbulence during the intake and compression stroke of the engine. In addition, the plots of compression pressure and turbulent kinetic energy (TKE) parameters are plotted according to degree of crank angle.
Figure 6.10 shows the pressure contours during the intake cycle 165 deg BTDC to compression cycle at TDC. The pressure inside the cylinder starts to rise after the intake and exhaust valves closes at 115 deg BTDC. The gradual increase in compression pressure at 95, 80, 65, 30 BTDC and at TDC is clearly observed.
Figure 6.10 (a) To 6.10 (c) also shows the ensemble average velocity vectors for intake cycle 165 deg BTDC to compression cycle at TDC at an engine speed of 500
RPM. From 165 to 115 BTDC, opening of the intake valve takes place. Since, the intake valve is located in the center of the piston; the air enters the cylinder from the both sides of the intake valve in the form of a jet almost parallel to the cylinder head. This air jet
91
reaches the both sides of the cylinder wall, strikes it and diverted. Since, the air flow near the cylinder wall is more predominant, the central part of intake valve and cylinder space will be a low pressure zone. Therefore, some amount of air from both side of the intake valve and cylinder space tries to rush towards the low pressure zone and mixing with the ambient air rapidly and form two vortex structures rotating in opposite directions inside the cylinder. This also leads to formation of turbulence. These two vortex structures or tumble flow structures (flow perpendicular to the cylinder axis) are moving within the cylinder as the engine enters into the compression cycle of the engine. These phenomena are clearly depicted in Figure 6.10.
Figures 6.10 (d) to 6.10 (h) shows the in-cylinder flow pattern during the compression stroke on a central plane from 95 to 30 BTDC to TDC. At 95 BTDC, two large tumble vortex created at the end of suction stroke has been symmetrically located on either side of the cylinder with reduced size. Both the vortices are striking each other and forming a bifurcation zone at the center of the cylinder space. This may be also due to the upward motion of the piston during compression stroke which is compressing the in-cylinder flow pattern as a whole. At 30 deg BTDC, the piston has moved further up and thereby reducing the cylinder space further. Due to compression, the large vortices formed earlier have been vanished. From Figure 6.10 (g), it is seen that the entire air flows upward with small vortices.
Figure 6.10 (h) shows the flow pattern at TDC. It is observed that entire air flows towards the center of the cylinder due the presence of squish region inside the combustion chamber of the Grail engine. Therefore, during the combustion, the air
92
movement and the vortex formation inside the combustion chamber of the Grail engine will aid proper flame propagation leading to effective combustion.
Figures 6.11 (a) To 6.10 (h) shows the turbulent kinetic energy (TKE) parameter for intake cycle 165 deg BTDC to compression cycle at TDC at an engine speed of 500
RPM. From 165 to 115 BTDC, opening of the intake valve takes place. Since, the intake valve is located at the center of the piston; the air enters the cylinder from both sides of the intake valve. From Figures 6.10 (a) to (c), it is also observed that maximum TKE are reaching their peaks. This may be due to higher inlet air velocity from the opening of the inlet valve creating the jet effect. Variation of TKE is almost in line with the variation of the average air velocities. The TKE increases from the center of the cylinder to the lateral cylinder walls. This is expected as the flow from the intake Valve flow is predominant near the cylinder walls than at the center of the cylinder.
Figures 6.10 (d) to 6.10 (h) shows the turbulent kinetic energy (TKE) parameter during the compression stroke on a central plane from 95 to 30 BTDC to TDC. The TKE was observed to be uniformly distributed inside the whole space of the cylinder. Gradual decrease in the TKE magnitude is seen during the compression stroke suggesting that not much tumble breakdown taking place inside the cylinder.
Figure 6.12 shows the calculated and experimental compression pressure curves under the motoring condition during intake and compression stroke. It is observed that the numerical peak pressure is in a close agreement with the experimental result.
Therefore, the CFD calculation and the mesh generated in the present analysis are sufficient enough for carrying out further turbulence analysis and intensive investigation.
As can be seen, the cylinder compression pressure obtained from the CFD simulation
93
has slightly lower value due to the difference in intake valve timings compared with the experimental setup and it is usually accepted for any validation of simulation results.
The generation of turbulence kinetic energy (m
2
/s
2
) during the intake and compression stroke can be obtained from the K model. The turbulence kinetic energy (TKE) was quantified for the Grail engine piston during the intake and compression stroke and plotted in Figure 6.13. During the initial stages of the intake stroke, the jet flow interactions between the flow and intake valve opening are the most important mechanism for the production of TKE. At the maximum intake valve lift, the production associated with the jet interaction penetrates inside the engine cylinder and the TKE production remains very homogeneous or stratified along the cylinder wall and cylinder head of the engine. This behavior continues throughout the intake cycle of the engine. At 115 deg BTDC, both inlet and exhaust valves closes leading to no intake jet flow and the velocity gradient associated with the flow. This leads to overall decrease in the production of turbulence near the cylinder head because of the absence of the source of generating the TKE.
However, as the piston moves upward during the compression stroke, the production of the TKE takes place due to the vortex or tumble stretching phenomenon releasing the turbulence energy in the process. This energy produced during the compression stroke helps in maintaining the turbulence. The locations where TKE produced are useful in order to distinguish the small scale mixing for the preparation of spark ignition for the rapid combustion process. As observed in the Figure 6.13 the TKE drastically decreased during the compression stroke suggesting that the tumble or vortex stretching phenomenon is not dominant which is not expected in the SI engines.
94
This suggest that the Grail engine piston and the cylinder head design needs modifications to have more tumble effect inside the combustion chamber at TDC.
However, the magnitude of the TKE achieved at TDC in the simulation is very much in the range achieved in majority of the literature [11, 37].
The magnitude of TKE obtained in this research is in the range of typical value of
TKE based on the published literature [11, 37, and 55]. Therefore, the investigation on the effect of Grail piston crown to the dynamic flow and turbulence in this effort has adequate comparison to be recognized as a valid CFD result.
(a) At 165 deg BTDC (b) At 145 deg BTDC
(c) At 130 deg BTDC (d) At 95 deg BTDC
Figure 6.10: Pressure Contour Vector Plot of Grail Engine at Different Crank
Angles
95
(e) At 80 deg BTDC (f) At 65 deg BTDC
(g) At 30 deg BTDC (h) At TDC
Figure 6.10: (continued)
(a) At 165 deg BTDC (b) At 145 deg BTDC
Figure 6.11: Turbulent Kinetic Energy (TKE) Contour Vector Plot of Grail Engine at Different Crank Angles
96
(c) At 130 deg BTDC (d) At 95 deg BTDC
(e) At 80 deg BTDC (f) At 65 deg BTDC
(g) At 30 deg BTDC (h) At TDC
Figure 6.11: (continued)
97
Compression Pressure Plot
(Cold Testing)
300
250
200
150
100
50
Sim. Data
Exp. Data
-200 -100
0
0 100 200
-50
Crank Angle (in Deg)
300
Figure 6.12: Plot showing Compression Pressure for Grail Engine Cylinder Model
TURBULENT KINETIC ENERGY
(TKE) (m
2
/s
2
)
INTAKE COMPRESSION
120
EXPANSION EXHAUST
-200
100
80
60
40
20
-100
0
0 100
-20
Crank Angle (in Deg)
200
TKE (m2/s2)
Figure 6.13: Plot showing TKE for Grail Engine Cycle
98
6.3 Grail Engine Uniflow Scavenging Simulation
The purpose of the simulation to be discussed here is to visualize the scavenging process as a whole and obtain a complete picture of flow field during the intake cycle of two-stroke Grail engine. Scavenging is the process of replacing the burnt gases with fresh charge from the cylinder. It plays an important role in increasing the performance and efficiency of the general two-stroke engine. Due to the difficulties associated with the experimental measurement techniques, Computational Fluid Dynamics (CFD) is a very helpful tool to analyze the flow pattern inside the cylinder. CFD simulations can provide more detailed information than experimental studies. For this reason, this section focuses on a numerical analysis to simulate the scavenging process inside the
Grail engine cylinder.
Due to the limitation of computational capability and the mesh generation methodology above studies have been concentrated on obtaining the mass flow rate parameter and the flow field of the Grail engine during the intake stroke of the engine.
These preliminary results provide insight into the scavenging process of the new twostroke Grail engine design and helps in designing future generation models.
6.3.1 Simulation Description
Grail engine model studied is a new engine design with a single-cylinder spark ignition (SI) engine with one intake valve located at the center of the piston and exhaust valve located at the center of the cylinder head as shown in Figure 6.14 and equipped with piston and piston tube channels as depicted in Figure 6.14. The piston crown and the piston tube channels below the piston is considered to investigate the behavior and pattern of the flow field dynamics during the scavenging process of the Grail engine.
99
The computational domain for the CFD simulation covers the intake port (piston tube channels), intake valve, exhaust port, exhaust valve, the cylinder head and the piston as shown in Figure 6.14. Higher mesh densities were generated near the valve seat region. The process of mesh generation was quite intensive and time consuming due to the complexities of Grail engine geometry and the un-structured mesh requirement. The tetrahedral mesh of 4 million elements was generated as shown in
Figure 6.15. Most of the cells were used to generate the mesh at the cylinder head and piston considering the grid sensitivity and reasonable computer run time. The fine grid structure was necessary for moving mesh during the valves and piston motion.
The scavenging process is numerically simulated only during the intake cycle of the Grail engine. At the start of the simulation, the inlet valve is in closed position and the exhaust valve is also in closed position. Both the inlet and exhaust valves were opened to 0.25 inch at complete open position. Linear motion boundary was applied to both inlet and exhaust valve which opens from 0 to 0.25 inch. The piston was applied with linear sinusoidal motion with a speed of 1000 RPM. The flow takes place due to the pressure difference between the inlet and outlet boundaries. The intake runners were applied with the inlet total pressure of 10 psig. The exhaust tube on the top of the cylinder was applied with the outlet static pressure of 0 psig (atmospheric). The cylinder was initialized with the static pressure of 20 psig. The exhaust port was initialized with a static pressure of 0 psig.
100
Figure 6.14: Geometry showing Grail Engine Model with Piston Crown
(a) 3-D Unstructured Mesh
(b) 2-D Plane Slices showing mesh
Figure 6.15: Geometry showing Mesh for Grail Engine Model
101
6.3.2 Simulation Results
The detailed investigation of the Grail engine model on the scavenging process for a two-stroke direct injection engine under motoring condition was carried out. The operational cycle of the two-stroke Grail engine was described with the intake and exhaust port during the intake cycle of the Grail engine. After the power stroke, the piston comes down. Just before the bottom dead center (BDC), the exhaust valve is opened and the burnt gases are purged out due to pressure difference between the cylinder chamber and the exhaust port. At BDC, the inlet valve is opened by the pressurized air and drives out the remaining exhaust gases. This process of introducing fresh air charge and expelling burnt gases is called scavenging. The incoming fresh air charge is used to expunge out the exhaust gases and then to fill up the space with fresh air. charge After reaching BDC, the piston moves upward on its return stroke. Both the intake and exhaust valve are closed, the air is then compressed as the piston moves to the top of its compression stroke.
Scavenging process has not only influences the consumption of fuel but also on the power and pollution of the engine. In an ideal CFD simulation, the air entering the cylinder acts like a wedge in pushing the burnt gases out of the cylinder without mixing with them. But in reality, the real scavenging process is characterized by mixing of the fresh and burnt gases and the short-circuiting losses. Short-circuiting losses occur due to expelling of some of the fresh-air charge directly to the exhaust and due to mixing small amount of burnt gases are trapped with the new air charge without being expelled out. In the present simulation, the mixing coefficient used between the air and carbondioxide was 0.16 cm
2
/s.
102
Figure 6.16 shows the static pressure field during the intake of scavenging process. As can be seen, the initial in-cylinder pressure, Figure 6.16 (a), is 20 psig. The intake pressure was set at 10 psig and exhaust pressures was set at 0 psig
(atmospheric), imposed as boundary conditions at the intake and exhaust ports. At the beginning of the simulation, the exhaust valve is opened and the burnt gases are purged out due to pressure difference and the pressure reduction is shown in Figures
6.16 (b) to 6.16 (e). Finally, when the intake valve is opened, Figure 6.16 (f), the remaining exhaust gases are expelled out by the incoming pressurized fresh air and filling the in-cylinder space for the next compression phase of the engine.
The mass fraction field during the intake of scavenging process is shown in
Figure 6.17. As can be seen, fresh air (blue color) enters through the inlet valve situated inside the piston of the cylinder and burnt gases (red color) are expelled through the exhaust valve situated at the top part of the cylinder head. Initially, the cylinder is full of burned gases (red color), the exhaust port with the fresh air (blue color), Figure 6.17 (a).
When the exhaust valve is opened, the burnt gases enters the exhaust port and the color is changed from blue to red color as shown in Figure 6.17 (b).When the scavenging process begins, the fresh air charge (blue color) throws away the burned gases out the cylinder, Figure 6.17 (b) and (f). At the end of the process as shown in
Figure 6.17 (f), the cylinder is full of fresh air charge and little amount of burned gases is seen due to mixing.
A very important advantage of CFD codes over experimental setups is that it is very easy to compute the portion of burnt gases which could not be expelled. In this thesis, it is quantified by means of the scavenging efficiency. This indicates the mass of
103
delivered air that is trapped by comparison with the total mass of air and fresh charge that is retained at exhaust closure. The scavenging efficiency is calculated using the
Equation 12 and its value is 79.82 for the parameters studied. The details of the calculation are given in appendix B.
Scavenging
Mass of Delivered Air Retained
Mass of Mixture in the Cylinder
(12)
(a) (b)
Figure 6.16: Pressure Contour Plot during the Scavenging Process of Grail Engine
104
(c) (d)
(e) (f)
Figure 6.16: (continued)
105
(a) (b)
(c) (d)
Figure 6.17: Mass Fraction Contour Plot during the Scavenging Process of Grail
Engine
106
(e) (f)
Figure 6.17: (continued)
107
CHAPTER 7
CONCLUSION
The main goal of the present research is to model the in-cylinder flow dynamics of new two-stroke Grail engine design using computational fluid dynamics (CFD).
Autodesk finite element solver with RANS K modeling is used in the present investigation. The present solver applicability to IC engine application and validity of the solver is established by using two experimental models provided in the literature. The simulations were divided into two categories, static and dynamic simulations. Finally, scavenging process of the Grail engine is also simulated. The conclusions drawn from all the simulation will be discussed in detail.
At the start of the study, the main aim is to validate the solver model used in simulating the in-cylinder flow dynamics of the Grail engine design. The use of K turbulence model is also justified with this study. Two different flow validation models were considered: (1) the flow around a fixed valve, and (2) the flow in a simple piston cylinder assembly with fixed open valve. The RMS velocity fluctuations at different locations and the TKE profiles inside the cylinder were calculated. The results obtained from the simulation agreed well with the experimental data.
The next step is to simulate the static Grail engine model and study different design parameters of the engine such as the inlet tubes below the piston and the holes inside the piston and their effect on the in-cylinder flow dynamics. Two cases were studied in the stationary Grail engine in-cylinder flow dynamics. Both of these cases are inter-related and the effect of each on the other is studied by having one case fixed. The first case is related to the hole that can be made in the head of the piston for the intake
108
air inside the combustion chamber. The second case is related to the shape of the tubes that can be used below the piston for the intake runners from the reed valve to the intake valve. The design that is recommended based on the CFD study is the piston with rectangular hole with D-tube configuration. The criterion used to decide the efficiency of this model is to have all this characteristics such as the swirl flow during the intake, minimal pressure drop during the flow in the channels and optimum value for the mass flow rate inside the cylinder. All this parameters were studied during the simulation.
The dynamic simulations of the Grail engine model were carried out. A moving mesh with a moving piston, intake, and exhaust valves is generated. The investigation and the analysis of the in-cylinder flow dynamics is numerically carried out under motoring conditions during the intake and compression stroke of the two-stroke Grail engine. Transient moving valves were modeled to resolve the swirl and tumble flow structures generated during the intake as well as the turbulence flow field parameters in the vicinity of valve and engine cylinder wall. The evaluation of the Grail piston crown shape is carried out to evaluate the effect of the Grail engine combustion chamber shape to the fluid flow structures and turbulence field for the preparation of air-fuel mixture. The results of the simulation such as velocity vector plots, pressure contour plots, compression pressure plots and turbulent kinetic energy (TKE) were presented for every crank angle (CA) throughout the intake and compression stroke. During the intake stroke, the shape of the piston crown plays an important role in developing the large scale fluid motion.
109
The dynamic simulation predicts a similar jet structure and strength between the valves and cylinder wall as found in the stationary simulation during the intake process.
During the compression stroke, the effect of compression on the flow field is minimal and as a result the velocity magnitudes and turbulent kinetic energy decreased rapidly.
This only suggests that the tumble breakdowns during the compression in the Grail engine cylinder are not dominant and therefore, design of the Grail piston crown and cylinder head needs consideration.
Finally, the numerical study of the scavenging process of new two-stroke Grail engine is carried out. In general, this study shows that CFD predictions yield reasonably accurate results that allow improving the knowledge of the fluid flow characteristics of the Grail engine. This model is very useful to understand the scavenging system of new
Grail engine. The mixing of the burnt gases and the fresh air charge entering the cylinder is also considered. The pressure field is useful for identifying areas where the gas flow is inefficient and should be corrected. The velocity vector field is useful for locating the vortices. Finally, the mass fraction field is useful for calculating the scavenging efficiency of 79.82.
In general, this preliminary study obtained from the CFD prediction gives reasonable results and helps in understanding the in-cylinder flow pattern and characteristics during the intake and compression strokes of the Grail engine instead of using the experimental test. At this moment, the CFD analysis results have not been validated with the experimental result due to high cost for experimental setup. However, the cylinder compression pressure under motoring condition has been validated with the experimental data of Grail engine model and its moving mesh generated during the
110
simulation have the capability to approach the real Grail engine condition. In addition, the analysis presented here represents the basic understanding of the fluid flow dynamics inside the cylinder of Grail engine.
111
REFERENCES
112
REFERENCES
[1] B. Murali Krishna, A. Bijucherian, and J.M. Mallikarjuna, “Effect of Intake Manifold
Inclination on Intake Valve Flow characteristics of a Single Cylinder Engine using
Particle Image Velocimetry,” Proceedings of World Academy of Science:
Engineering & Technology , Vol. 46, Oct. 2008, pp. 853.
[2] S.A. Basha, K. Raja Gopal, “In-Cylinder Fluid Flow, Turbulence And Spray
Models—A Review,” Renewable and Sustainable Energy Reviews , Vol. 13,
Issues 6-7, Sep. 2009, pp. 1620–1627.
[3] J.B. Heywood, Internal Combustion Engine Fundamentals , McGraw-Hill,
Singapore, 1988.
[4] A. Chen, A. Veshagh, and S. Wallace, “Intake Flow Predictions Of A Transparent
DI Diesel Engine,” SAE Technical paper No. 981020, 1998,
DOI:10.4271/981020.
[5] W.A. Sirignano, “Volume Averaging for the Analysis of Turbulent Spray Flows,”
International Journal of Multiphase Flow , Vol. 31, Issue 6, June, 2005, pp. 675-
705, DOI: 10.1016/j.ijmultiphaseflow.2005.02.005.
[6] S.E. Tahry, and D. Haworth, “Directions In Turbulence Modeling For In-Cylinder
Flows In Reciprocating Engines,” AIAA Journal of Propulsion and Power , Vol. 8,
No. 5, 1992, pp. 1040–1048, DOI: 10.2514/3.23590.
[7] D.C. Haworth, “Large-Eddy Simulation Of In-Cylinder Flows,” Oil & Gas Science and Technology - Rev. IFP , Vol. 54, No. 2, April, 1999, pp. 175-185.
[8] www.grailengine.com
, Grail Engine Technologies Inc. [cited 21 January 2015]
[9] Autodesk CFD User’s Manual, Autodesk CFD 2014, ver. 14.0, Autodesk Inc.
[10] R.P.C. Zegers, T.J. van der Meyden, C.C.M. Luijten, N.J. Dam, R.S.G. Baert and
L.P.H. de Goey "Crank Angle Resolved flow field Characterization Of A Heavy-
Duty (PCCI) Engine," Proceedings of the European Combustion Meeting , 2009.
[11] B. Murali Krishna and J.M. Mallikarjuna “Effect Of Engine Speed On In-Cylinder
Tumble Flows In A Motored Internal Combustion Engine An Experimental
Investigation Using Particle Image Velocimetry," Journal of Applied Fluid
Mechanics , Vol. 4, Issue 1, 2011, pp. 1-14.
113
[12] K. Kazunari, and H. Ando “Diagnostics Of In-Cylinder Flow, Mixing And
Combustion In Gasoline Engines," Journal of Measurement Science and
Technology , Vol. 11, Issue 6, June, 2000, pp. R95–R111, DOI:10.1088/0957-
0233/11/6/202.
[13] B. Khalighi, “Study of the Intake Tumble Motion by Flow Visualization and
Particle Tracking Velocimetry," Journal of Experiments in Fluids , Vol. 10, Issue 4,
Jan. 1991, pp. 230-236.
[14] Y. Li, H. Zhao, Z. Peng, and N. Ladommatos, "Particle Image Velocimetry
Measurement of In-Cylinder Flow In Internal Combustion Engines Experiment
And Flow Structure Analysis," Proceedings of the Institution of Mechanical
Engineers, Part D: Journal of Automobile Engineering, Vol. 216, No. 1,Jan. 2002, pp. 65-81 .
[15] A. Yasar, B. Sahin, H. Akilli, and K. Aydin, "Effect of Inlet Port On The Flow In
The Cylinder Of An Internal Combustion Engine," Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science ,
Vol. 220, No. 1, Jan. 2006, pp. 73-82.
[16] Y. Li, H. Zhao and T. Ma, "Flow and Mixture Optimization for a Fuel Stratification
Engine Using PIV and PLIF Techniques," Journal of Physics : Conference Series,
Vol. 45, 2006, pp. 59–68.
[17] M. Reeves, M.J. Haste and N.A. Halliwell, "Barrel Swirl Breakdown In Spark-
Ignition Engines: Insights From Particle Image Velocimetry Measurements,"
Proceedings of the Institution of Mechanical Engineers, Part D: Journal of
Automobile Engineering , Vol. 213, No. 6, June,1999, pp. 595-609.
[18] V. Gerardo, D. Kaufman and P. Farrell, " Intake Valve Flow Measurements Using
PIV," SAE Technical Paper No. 932700, 1993, DOI:10.4271/932700.
[19] P. Stansfield, G. Wigley, T. Justham, J. Catto and G. Pitcher, " PIV Analysis Of
In-Cylinder Flow Structures Over A Range Of Realistic Engine Speeds," Journal of Experiments in Fluids , Vol. 43, Issue 1, July, 2007, pp. 135–146.
[20] M. Auriemma, F.E. Corcione, U.Di Martino, and G. Valentino, "Analysis Of The
Intake Flow In A Diesel Engine Head Using Dynamic Steady Flow Conditions,"
SAE Technical Paper No. 2001-01-1307, 2001, DOI:10.4271/2001-01-1307.
[21] S. Nadarajah, S. Balabani, M.J. Tindal, and M. Yianneskis, "The Effect Of Swirl
On The Annular Flow Past An Axi-Symmetric Poppet Valve," Proceedings of the
Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering
Science, Vol. 212, No. 6, June, 1998, pp. 473-484 .
114
[22] F. Corcione and G. Valentino, “Analysis of In-Cylinder Turbulent Air Motion
Dependence on Engine Speed," SAE Technical Paper No. 940284, 1994,
DOI:10.4271/940284.
[23] F. Payri, J. Benajes, X. Margot, A. Gil, “CFD Modeling Of The Incylinder Flow In
Direct-Injection Diesel Engines,” Journal of Computers & Fluids , Vol. 33, 2004, pp. 995-1021.
[24] B. Ahmadi-Befrui, A.D. Gosman, “Assesment of Variants of The K-Ε Turbulence
Model For Engine Flow Applications,” International Journal for Numerical
Methods in Fluids , Vol. 9, No. 9, 1989, pp. 1073-1086.
[25] D.C. Haworth, S.H. El Tahry, “Probability Density Function Approach For
Multidimensional Turbulent Flow Calculations With Application To Incylinder
Flows In Reciprocating Engine,” AIAA Journal , Vol. 29, No. 2, 1991, pp. 208-218.
[26] D.C. Haworth, S.H. El Tahry, M.S. Huebler, S. Chang, “Multidimensional Port-
And-Cylinder Flow Calculations For Two-And Fourvalve-Per-Cylinder Engines:
Influence Of Intake Configuration On Flow Structure,” SAE Transactions,
900257, pp. 647-678, 1990.
[27] J.A. Naser, A.D. Gosman, “Flow Prediction In An Axisymetric Inlet Valve/Port
Assembly Using Variants Of K-Ε,” Proc. Instn. Mech. Engrs.
, Vol. 209, 1995, pp.
57-69.
[28] A.D. Gosman, A. Melling, J.H. Whitelaw, P. Watkins, “Axisymmetric Flow In A
Motored Reciprocating Engine,” Heat and Fluid Flow IMechE , Vol. 8, No. 1,
1978, pp. 21-31.
[29] A.D. Gosman, R.J.R. Johns, “Computer Analysis Of Fuel-Air Mixing In Direct-
Injection Engines,” SAE Transactions, 800091, pp. 581-596, 1980.
[30] B. Ahmadi-Befrui, A.D. Gosman, F.C. Lockwood, A.P. Watkins, “Multidimensional
Calculation Of Combustion In An Idealised Homogeneous Charge Engine: A
Progress Report,” SAE Transactions, 810151, pp. 636-651, 1981.
[31] A.D. Gosman, P.S. Harvey, “Computer Analysis Of Fuel-Air Mixing In An
Axisymmetric D. I. Diesel,” SAE Transactions, 820036, pp. 121-141, 1982.
[32] S. Jakirlic, C. Tropea, I. Hadzic, H. Pascal, K. Hanjalic, “Computational Study Of
Joint Effects Of Shear, Compression And Swirl On Flow And Turbulence In A
Valveless Piston-Cylinder Assembly,” SAE Transactions, 2001-01-1236, pp.
1402-1439, 2001.
115
[33] J. Ranasinghe, S. Cant, “A Turbulent Combustion Model For A Stratified
Charged, Spark Ignited Internal Combustion Engine,” SAE Transactions, 2000-
01-0275, pp. 336-346, 2000.
[34] A.P. Watkins, S.P Li, R. S. Cant, “Premixed Combustion Modeling For Spark-
Ignition Engine Applications,” SAE Transactions 961190, 1996.
[35] A. Chen, K.C. Lee, M. Yianneskis, “Velocity Characteristics Of Steady Flow
Through A Straight Generic Inlet Port,” International Journal for Numerical
Methods in Fluids , Vol. 21, 1995, pp. 571-590.
[36] S.H. El Tahry, “ k Equation For Compressible Reciprocating Engine Flows,”
AIAA Journal of Energy , Vol. 7, No. 4, 1983, pp. 345-353.
[37] H. Sushma, and K.B. Jagadeesha,“ CFD Modeling Of The In-Cylinder Flow In
Direct-Injection Diesel Engine,” International Journal of Scientific and Research
Publications , Vol. 3, Issue 12, December, 2013.
[38] Benny Paul, V. Ganesan, “Flow Field Development In A Direct Injection Diesel
Engine With Different Manifolds,” International Journal of Engineering, Science and Technology , Vol. 2, No. 1, 2010, pp. 80-91.
[39] P.H. Epstein, R.D. Reitz, and D.E. Foster, "Computations Of Two-Stroke Cylinder
And Port Scavenging". SAE Technical Paper No. 919672, 1991.
[40] L. Yu, T. Campbell, and W. Pollock, "A Simulation Model For Direct-Fuel-
Injection Of Two-Stroke Gasoline Engines," SAE Technical Paper No. 970367,
1997.
[41] A.A. Amsden, P.J. O´Rourke, T.D. Butler, K. Meintjes, and T.D. Fansler,
"Comparisons Of Computed And Measured Three-Dimensional Velocity Fields In
A Motored Two-Stroke Engine," SAE Technical Paper No. 920418, 1992.
[42] B.D. Raghunathan, and R.G. Kenny, "CFD Simulation And Validation Of The
Flow Within A Motored Two-Stroke Engine," SAE Technical Paper No. 970359,
1997.
[43] Hariharan Ramamoorthy, N.V. Mahalakshmi, "Setting Up A Comprehensive CFD
Model Of A Small Two Stroke Engine For Simulation," International Journal of
Applied Engineering Research . Vol. 4, Issue 11, 2009.
[44] W. Zahn, H. Rosskamp, M. Raffenberg, and A. Klimmek, "Analysis Of A Stratified
Charging Concept For High-Performance Two-Stroke Engine," SAE Technical
Paper No. 2000-01-0900, 2000.
116
[45] F.J. Laimböck, G. Meist, and S. Grilc, "CFD Application In Compact Engine
Development," SAE Technical Paper No. 982016, 1998.
[46] H. Hori, T. Ogawa, and K. Toshihiko, "CFD In-Cylinder Flow Simulation Of An
Engine And Flow Visualization," SAE Technical Paper No. 950288, 1985.
[47] S.R. Pitta, R. Kuderu "A Computational Fluid Dynamics Analysis On Stratified
Scavenging System Of Medium Capacity Two-Stroke Internal Combustion
Engines," Journal of Thermal Science , Vol. 12, Issue 1, 2008, pp. 33-42.
[48] A. Albanesi, C. Destefanis, A. Zanotti, "Intake Port Shape Optimization In A Four-
Valve High Performance Engine," Mecánica Computacional , Vol. 28, 2009, pp.
1355-1370.
[49] B.E. Launder, & D.B. Spalding, "The Numerical Computation Of Turbulent
Flows", Computer Methods in Applied Mechanics and Engineering , Vol. 3, Issue
2, 1974, pp. 269-289.
[50] L. Graftieux, ”Combining LDA and PIV for Turbulence Measurements in
Unsteady Swirling Flows”, Measurement Science & Technology , Vol. 12, No. 9,
2001.
[51] A.P. Morse, J.H. Whitelaw, M. Yianneskia, "Turbulent flow Measurement By
Laser Doppler Anemometry In A Motored Reciprocating Engine," Imperial
College Dept. Mech. Eng., Report FS/78/24, 1978.
[52] A. Banaeizadeh, A. Afshari, H. Schock, and F. Jaberi, "Large-Eddy Simulations
Of Turbulent flows In Internal Combustion Engines," International Journal of Heat and Mass Transfer , Vol. 60, 2013, pp. 781–796.
[53] R. Verzicco, J. Mohd-Yusof, P. Orlandi and D. Haworth, "LES In Complex
Geometries Using Boundary Body Forces," Center for Turbulence Research
Proceedings of the Summer Program, 1998.
[54] Agop Ekchian, Flow Visualization Study of the intake process of an internal combustion engine , PhD thesis, Massachusetts Institute of Technology, 1978.
[55] Wendy Hardyono Kurniawan, Shahrir Abdullah, Kamaruzzaman Sopian, Zulkifli
Mohd. Nopiah and Azhari Shamsudeen, "CFD Investigation Of Fluid Flow And
Turbulence Field Characteristics In A Four-Stroke Automotive Direct Injection
Engine," Journal - The Institution of Engineers , Vol. 69, No. 1, 2008.
117
APPENDIXES
118
APPENDIX A
MESH STUDY FOR VALIDATION MODEL 1
Mesh are important part of computational fluid dynamics study and especially so in simulations of unsteady shear layer problems. The resolution of the mesh should be sufficiently dense to resolve important flow parameters. In the present study, grid independent study is performed on a 3-D grid of validation model 1 for three different meshes and their effects on the solution are analyzed. The main aim is to illustrate the application of the solver for engine flow application.
To perform the mesh study for validation model 1, three different grids, (Grid 1,
Grid 2 and Grid 3) were generated. Figures A1-A3 illustrates an overall view of these grids. Grid 1 was generated with an unstructured mesh of 3.2 million elements, while
Grid 2 was generated with 4 million elements and Grid 3 resulted in 4.8 million elements. Autodesk CFD [9] finite element solver with K turbulence model was used to obtain the solution for the validation model 1 for all the grids. The computation was performed for a total of 3000 time steps or total of 0.03 second with a time step size of 1x10
-5
second.
119
APPENDIX A (continued)
Figure A1: Grid 1 Mesh
Figure A2: Grid 2 Mesh
120
APPENDIX A (continued)
Figure A3: Grid 3 Mesh
The mean and rms velocities are presented for validation model 1 for three grid models, Grid 1, Grid 2 and Grid 3 and are shown in Figure A4 and Figure A5 for two different locations. The behavior of the solution of all the grid models with the experimental data was similar. The variations in the velocity plot for all the grid models were small and the solution was considered to be mesh independent. Slight variations in amplitude of velocity profiles are observed at some times. This variation is due to the unsteady nature of the problem involved and is expected.
121
APPENDIX A (continued)
Mean Axial Velocity
RMS Axial Velocity
15
10
5
0
-5
0
EXP
Grid 1
Grid 2
Grid 3
6
4
2
0
0 0.5
r/R
1 0.5
r/R
1
Figure A4: Axial Velocity Profiles at z = 20 mm for Validation Model 1
EXP
Grid 1
Grid 2
Grid 3
-0.5
15
10
5
0
-5
-10
0
Mean Axial Velocity
0.5
1 r/R
EXP
Grid 1
Grid 2
Grid 3
3
2
1
0
0
RMS Axial Velocity
0.5
r/R
1
Figure A5: Axial Velocity Profiles at z = 70 mm for Validation Model 1
EXP
Grid 1
Grid 2
Grid 3
122
APPENDIX B
CALCULATION OF SCAVENGING EFFICIENCY
The scavenging efficiency is defined as:
Scavenging
Mass of Delivered Air Retained
Mass of Mixture in the Cylinder
From the simulation, the following data are obtained for a single cylinder engine
Mass of Mixture in the cylinder = 0.0009495 kg.
Mass flow rate at the inlet = 0.06638 kg/s.
Inlet valve timing = 0.0142 sec.
Total mass of air that entered the cylinder during the inlet valve opening = 0.000942596 kg.
From the literature, approximately on average 20% of air is short-circuited for a wide open throttle.
Mass of the fresh air retained = 0.0007441 kg.
The approximate scavenging efficiency of the Grail engine with short circuiting is
79.82%.
From the scalar simulation, the mean averaged scalar value within the cylinder after scavenging is 0.127. However, scavenging by definition is the amount of burnt gases that are expunged out of the cylinder by the fresh charge. The amount of burnt gases
(co2) that is expunged out from the cylinder is 87.3%.
123