7 Computer Modeling in Basal Ganglia Disorders José Luis Contreras-Vidal
advertisement

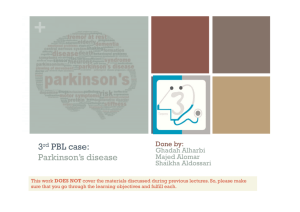
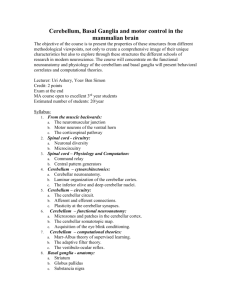
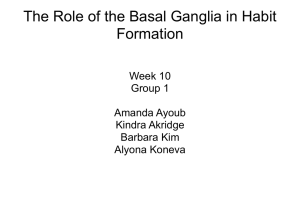
Computer Models of Atypical Parkinsonism 95 7 Computer Modeling in Basal Ganglia Disorders José Luis Contreras-Vidal 1. INTRODUCTION The last two decades have witnessed an increasing interest in the use of computational modeling and mathematical analysis as tools to unravel the complex neural mechanisms and computational algorithms underlying the function of the basal ganglia and related structures under normal and neurological conditions (1–3). Computational modeling of basal ganglia disorders has until recently been focused on Parkinson’s disease (PD), and to a smaller scale, Huntington’s disease (HD) (4–6). However, with the advent of large-scale neural network models of frontal, parietal, basal ganglia, and cerebellar network dynamics (7–9), it is now possible to use these models as a window to study neurological disorders that involve more distributed pathology such as in atypical parkinsonian disorders (APDs). Importantly, computational models may also be used for bridging data across scales to reduce the gap between electrophysiology and human brain imaging (10), to integrate data in all areas of neurobiology and across modalities (11), and to guide the design of novel experiments and intervention programs (e.g., optimization of pharmacotherapy in PD) (12). This chapter aims to present the paradigm of computational modeling as applied to the study of PD and APDs so that it can be understood for those approaching it for the first time. Therefore, mathematical details are kept to a minimum; however, references to detailed mathematical treatments are given. The brain, in its intact state, is a very complex dynamical system both structurally and functionally, and many questions remain unanswered. However, theoretical and computational neuroscience approaches may prove to be a very valuable tool for the neuroscientist and the neurologist in understanding how the brain works in health and disease. The Modeling Paradigm Computational models of brain and neurological disorders vary widely in the focus and scale of the modeling, their degrees of simulated biological realism, and the mathematical approach used (13). A combination of “top-down” and “bottom-up” approaches to computational modeling in neuroscience is depicted in Fig. 1, which shows the series of steps that need to be taken to study brain disorders computationally. One first has to measure the behavioral operating characteristics (BOCs), such as movement kinematics, average firing rates of homogenous cell populations, or neurotransmitter levels under intact conditions. The next step is to construct a mathematical model based on the behavioral, anatomical, neurophysiological, and pharmacological data concerned with the production of the BOCs. The specified model should be capable of reproducing the measured behavior. The modeled output is compared with the initial BOCs, leading to model refinement and further computer simulations until a reasonable match between the measured and the modeled BOC can be achieved. From: Current Clinical Neurology: Atypical Parkinsonian Disorders Edited by: I. Litvan © Humana Press Inc., Totowa, NJ 95 96 Contreras-Vidal Fig. 1. The paradigm of neural network modeling. Although models are usually developed to demonstrate the biological plausibility of a particular preexisting hypothesis, or to show how computational algorithms may be implemented in neural networks, the same models can be used to generate and test new ideas by analyzing the emergent properties of the model—model properties that cannot be explained by the operation or the wiring of individual model components alone. Moreover, by lesioning the intact structural components of the model, manipulating its dynamic mechanisms, or altering its inputs, it is possible to characterize the neuropathology of the disease and the associated changes in the behavior. It is then also possible to test the effect of surgical or pharmacological interventions to counteract the effects of lesions or disease (2,12). Thus, computational modeling of neurological disorders involves a succession of modeling cycles to first account for neural mechanisms underlying the normative data, followed by the characterization and simulation of diseased mechanisms and abnormal behavior. Modeling PD and APDs Although a comprehensive review of the literature on modeling of basal ganglia function in health and disease is not possible because of space limitations, the reader is referred to the reviews of Beiser et al. (1), Ruppin et al. (2), and Gillies and Arbuthnott (3) for a detailed account. These efforts have focused on explaining the roles of the basal ganglia in procedural learning (14–17), action selection (18–20), serial order (21–23), and movement planning and control (24–27). Unfortunately, although these models have provided insights on the abnormal mechanisms underlying PD, few efforts have been put forward on modeling APDs. Thus, one goal of this chapter is to describe how existing models of cortical, basal ganglia, and cerebellar dynamics can be used to model and simulate APDs. In the next section, we briefly review the neuropathology in APDs. The reader is referred to Chapters 1, 4, 8, and 18–20 of this book for detailed reviews and discussion of the underlying neuropathology. Neuropathology of the APDs It is widely recognized that the differential diagnosis of APDs presents some difficult problems. First, clinical diagnostic criteria are often suboptimal or partially validated (28); and second, the Computer Models of Atypical Parkinsonism 97 usefulness of routine brain-imaging techniques, such as magnetic resonance imaging (MRI), is still debatable because of issues such as specificity, sensitivity, variations in technical parameters, and the experience of radiologists and neurologists (29). Nevertheless, modern MRI methodologies are useful to differentiate PD from APDs, as brain MRI in PD is grossly normal. Moreover, MRI studies suggest specific regional brain markers associated with the underlying pathology in APDs, such as multiple system atrophy (MSA), progressive supranuclear palsy (PSP), and corticobasal degeneration (CBD). Importantly, as these data can be used as a starting point for modeling purposes (Fig. 1), we briefly summarize the MRI findings. Multiple system atrophy of the parkinsonian type (MSA-P) appears to be characterized by putaminal atrophy, T2-hypointensity, and “slit-like” marginal hyperintensity (29–32), whereas MSA of the cerebellar type (MSA-C) usually is accompanied by atrophy of the lower brainstem, pons, middle cerebellar peduncles, and vermis, as well as signal abnormalities in the pontine and the middle cerebellar peduncles (30,31,33,34). Mild-to-moderate cortical atrophy is also common to both MSAP and MSA-C (29,35). PSP is usually characterized by widespread cell loss and gliosis in the globus pallidus, subthalamic nucleus, red nucleus, substantia nigra, dentate nucleus, and brainstem, and often cortical atrophy and lateral ventricle dilatation (29). These patients also show decreased 18F-flurodopa in both anterior and posterior putamen and caudate nucleus, and an anterior–posterior hypometabolic gradient (36). On the other hand, CBD may be differentiated by the presence of asymmetric frontoparietal and midbrain atrophy (29). Interestingly, cortical atrophy in APDs, particularly in cases involving damage of frontoparietal networks, is consistent with reports of ideomotor apraxia, which can also be seen in PD patients when their pathology is coincident with cortical atrophy (36–39). In particular, patients with PD and PSP, who showed ideomotor apraxia, had the greatest deficits in movement accuracy, spatial and temporal coupling, and multijoint coordination (38). However, as has been noted elsewhere, it remains to be seen if the kinematic deficits observed in this patients are characteristic of apraxia or are caused by elementary motor deficits (40). Given the pathological heterogeneity seen in patients with APDs, and even in PD, it seems that computer modeling would be a useful tool to study how damage to frontoparietal networks and their interaction with a dysfunctional basal ganglia and/or cerebellar systems may increase the kinematic abnormalities beyond some threshold that would result in the genesis of limb apraxia. MODELING STUDIES In this section we present two examples of computational models of basal ganglia disorders. The first example presents a model formulated as a control problem to investigate akinesia and bradykinesia in PD, whereas the second example, formulated as a large-scale, dynamic neural network model involving frontoparietal, basal ganglia, and cerebellar networks, investigates the effects of PD and PSP on limb apraxia. Modeling Hypokinetic Disorders in PD Contreras-Vidal and Stelmach proposed a neural network model of the sensorimotor corticostriato-pallido-thalamo-cortical system to explain some movement deficits (the “BOCs” in the modeling cycle) seen in PD patients (24). This model, originally specified as a set of nonlinear differential equations, proposed the concept of basal ganglia gating of thalamo-cortical pathways involved in movement preparation (or priming), movement initiation and execution, and movement termination (Fig. 2A). In this model, three routes for cortical control of the basal ganglia output exist: activation of the “direct pathway” opens the gate by disinhibition of the thalamic neurons (route 1), whereas activation of both a slower indirect (through GPe, route 2) pathway and a faster direct cortical (route 3) pathway closes the gate through inhibition of thalamo-cortical neurons. 98 Contreras-Vidal Fig. 2. (A) Three pathways for control of pallidal output by cortical areas. B) Block diagram of the corticobasal ganglia-thalamo-cortical network of Contreras-Vidal and Stelmach (24). The basal ganglia output (GPi) gates activity at the ventro-lateral thalamus (VLo), thus modulating cortico-cortical communication in the “vector integration model” that progressively moves the endeffector (PPV) to the target location (TPV). The basal ganglia gating allows priming and controls the speed of change from limb present position (PPV) to target position (TPV). Filled circles imply inhibitory connections, whereas arrows imply excitatory connections. In this theoretical framework, activation of pathway 1 would result in activation of thalamo-cortical motor circuits leading to initiation and modulation of movement, whereas activation of pathway 2 would lead to breaking of ongoing movement. Activation of pathway 3 would facilitate rapid movement switching, or prevent the release of movement. The model postulated a role of the pallidal output for generating an analog gating signal (at the thalamus) that modulated a (hypothesized) cortical system that vectorially computed the difference between a target position vector and the present limb position vector, the so-called Vector-Integration-To-Endpoint (VITE) model (Fig. 2B) (41). In this computational model, the basal ganglia output had the role of gating the onset, timing, and the rate of change of the difference vector (DV), therefore controlling movement parameters such as movement initiation, speed, and size. Moreover, the proposed basal ganglia gating function allows three control modes: preparation for action or priming (gate is closed), initiation of action (gate starts to open), and termination of action (gate starts to close). Simulations of this model demonstrated a single mechanism for akinesia, bradykinesia, and hypometria, and a correlation between degree of striatal dopamine depletion and the severity of the PD signs. In the terminology of control theory, it can been shown that the sensorimotor cortico-basal ganglia network of Contreras-Vidal and Stelmach (24) can be approximated as a proportional + derivative controller (Equation 1) with time-varying position (Gp; Equation 2) and velocity (Gv; Equation 3) gains. The system described by the second-order differential equation (1) represents the motion of the endpoint (P) toward the target (T) under the initial position and velocity conditions P = P0 and dP0/dt = 0, respectively. d 2 P = Gv d P – G p P – T dt dt 2 (1) Computer Models of Atypical Parkinsonism G p = α G0 99 t 1+t Gv = 1 + t 2 – α 1+t (2) (3) where α represents an integration rate and G0 is a scaling constant and t is the time in sec. The system given by Equations 1–3 is based on the experimentally testable assumption that pallidal signals modulate the ventro-lateral thalamus (VLo) such that the pattern of thalamic output has a sigmoidal shape or is gradually increasing as a function of time as in Equation 4. This assumption implies that either a compact set of pallidal neurons progressively decrease their firing rate as a function of time before movement onset, therefore gradually disinhibiting the motor thalamus, or an increasing number of (inhibitory) pallidal cells, controlling the prime movers, are depressed as the movement unfolds. VL o = G 0 t 1+t (4) Figure 3 shows the mean cumulative distributions of onsets (decreases and increases) for GPi neurons prior to movement onset obtained from a set of neurophysiological studies published between 1978 and 1998 (Table 1) in which information about the timing of internal globus pallidus (GPi) neurons was available. The plot shows a gradual buildup or decrease of the mean cumulative distribution of neurons whose activations were either enhanced or depressed prior to movement onset. Overall, increases in GPi activity were predominant (48% and 26% for increases and decreases, respectively). It is likely that the small percentage of GPi depressions prior to movement onset reflects the focused activation of prime mover muscles required to produce an arm movement. Interestingly, the mean cumulative distribution shows an increasing number of GPi neurons that are depressed, which supports the foregoing model’s assumption. Computer simulations of the set of equations (1–4) show that smaller-than-normal position and velocity gains can lead to bradykinesia (Fig. 4). Therefore, it is hypothesized that a function of basal ganglia networks is to compute these time-varying position and velocity gains. Low gains would prevent appropriate opening of the pallidal gate leading to poor activation of thalamo-cortical pathways involved in movement, whereas high gains may lead to excess or unstable movement. Interestingly, Suri and colleagues also used a dynamical linear model to model basal ganglia function and their simulations suggested that low gains in the direct and indirect pathways resulted in PD motor deficits (26). In addition, reduced movement amplitudes may be caused by premature resetting of these gains that prevent movement completion. Indeed, we have shown that smaller-than-normal (in duration and size) pallido-thalamic signals produced by dopamine depletion in the basal ganglia can reproduce micrographic handwriting (12). Modeling Abnormal Kinematics During Pointing Movement and Errors in Praxis in PD and APDs To study the kinematic aspects of movement in basal ganglia disorders, we have performed computer simulations of the finger-to-nose task and a “bread-slicing gestural task”; the latter task is used commonly in testing for ideomotor apraxia (38). These two tasks require the integration and transformation of sensory information into motor commands for movement, and therefore successful task completion depends on accurate spatial and temporal organization of movement. 100 Contreras-Vidal Fig. 3. Mean cumulative (SE) distributions of activations and depressions of GPi activity obtained from set of studies in Table 1. Table 1 Cumulative Distribution of Onsets for GPi Cells Initial Timing of Discharge (%) Prior to: –150 ms Ref 42a 43b 44d 45 46e 47g 48h 49i Location C (m. N) NAc DL EP NA VL VL (m. 2) DL EP DL/VL Mean % Total –100 ms –50 ms 0 ms EMG 7 — 22 — — — 57 — 0 — 14 — — — 16 — 27 — 45 — 10f 19 57 17 0 — 29 — 4 3 16 17 40 2 48 — — 81 63 25 7 2 31 — — 14 18 53 53 — 53 38 29 84 66 62 13 — 34 26 12 15 19 91 20 7 37 11 2 37 NA NA 10.8 3.8 21.9 8.6 32.4 15.6 48.1 26.3 cells # 0 7 24 14 1 7 NA NA 15 35 114 36 41 68 28 18 14.3 6.63 — 355 , increase;, decrease; C, centered; DL, dorsolateral; EMG, onset of first muscle activity in prime movers; EP, entopenduncular nucleus (GPi-like structure in felines); GPi, internal globus pallidus; m., monkey; NA, data not available; VL, ventrolateral. All times with respect to movement onset, except EMG data. Notes: a biphasic stimulation trains (from Fig. 8), b EMG recordings were made at separate times from the single-cell recordings; c recording was done from “full extent of GP” and percentages of discharges were divided equally in increases and decreases; d estimated from Fig. 9 (61%: , 39%: ); e for VisStep task (71% [29%] GPi increased [decreased] their discharge overall); f estimated from Fig. 5, by counting number of samples during time interval and dividing by the maximum number of conditions (four); g data estimated from Fig. 6C (85%: , 15%: ); h estimated from Fig. 4 (assumes uniform distributions of 78% activations in EP); i data estimated from Fig. 3B. Computer Models of Atypical Parkinsonism 101 Fig. 4. Simulations of normal (thick lines) and Parkinson’s disease (thin lines) movement control. Joint position (ramp trajectories) and velocity (bell-shaped trajectories) for three different position and velocity gain settings are shown (α = 10; G0 = 10; normal: Gp = Gv = 1.0; PD1: Gp = Gv = 0.6; PD2: Gp = Gv = 0.2). Reducing the gain resulted in slower movement (bradykinesia). Figure 5 depicts a schematic diagram of frontal, parietal, basal ganglia, and cerebellar networks postulated to be engaged in the learning and updating of sensorimotor transformations for reaching to visual or proprioceptive targets. The model is based on an extension of the computational models of Bullock et al. (9) and Burnod et al. (8), and recent imaging and behavioral experiments (50–53) that suggest distinct roles for fronto-parietal, basal ganglia, and cerebellar networks. In the model, visual and/or proprioceptive signals about target location and end-effector position are used to code an internal representation for target (T) and arm (Eff), presumably in posterior parietal cortex (PPC). These internal representations are compared to compute a spatial difference vector (DVs) as in the cortical “vector integration model” depicted in Fig. 2B. The DV’s outflow must be transformed into a joint rotation vector (DVm) in order to guide the end-effector to the target. This spatial direction-tojoint rotation transformation is an inverse kinematic transformation and computationally, it can be learned through certain amount of simultaneous exposure to patterned proprioceptive and visual stimulation under conditions of self-produced movement—referred to as “motor babbling” (8,9). The cortical network just described is complemented by two subcortical networks connected in two distinct, parallel, lateral loops, namely, a frontostriatal network and a parieto-cerebellar system. The former provides a learned bias term that rotates the frame of reference for movement, whereas the latter provides a correction term that is added to the direction vector whenever the actual direction of movement deviates from the desired one. The frontostriatal network is modeled as an adaptive search element that performs search and action selection using reinforcement learning (15). This system uses an explicit error (dopamine) signal to drive the selection and the reinforcement/punishment mechanisms used for learning new procedural skills. It searches and evaluates candidate visuomotor actions that would lead to acquisition of a spatial target. The cerebellar component is modeled as an adaptive error-correcting module that continuously provides a compensatory signal to drive the visuomotor error (provided by the climbing fibers) to zero (7). 102 Contreras-Vidal Fig. 5. Diagram of hypothesized networks involved in sensorimotor transformation for reaching. See text for description. Simulating the Finger-to-Nose Test in Control, PD, and APD The model summarized in the previous discussion was implemented in Matlab Simulink (following the mathematical equations in refs. 8 and 9) to investigate the effects of PD and APDs in the spatial and temporal characteristics of repetitive pointing movement to the nose (a kinesthetic target). Figure 6 depicts the movement trajectories and the joint angles for a simulated arm with three joints (shoulder, elbow, wrist). The simulation assumed horizontal movements at the nose level, and therefore the paths are shown as two-dimensional plots. As expected, in the virtual control subject, the finger-to-nose trajectories were slightly curved and showed high spatial and temporal accuracy. The joint excursions reflected the repetitive nature of the task with most of the movement performed by elbow flexion/extension followed by the shoulder and to a lesser degree by the wrist. To simulate PD, the gain of the basal ganglia gating signal was decreased by 30% with respect to that in the intact system. In addition, Gaussian noise (N(0,1)*30) was added to the internal representation of the hand to account for kinesthetic deficits reported in PD patients (degradation of the kinesthetic representation of the spatial location of the nose would have had the same effect) (54). Computer simulations of the PD network showed decreased movement smoothness and increased spatial and temporal movement variability. Moreover, the joint rotations were slower and progressively decreased in amplitude. Thus, the simulation is consistent with reports of deficits in the production of multiarticulated repetitive movement in PD. Following the observations of cortical atrophy in frontal and parietal areas in APD summarized in subheading Neuropathology of the APDs, we modeled this disease in two steps: First, we added noise (uniform distribution between 0 and 1.5) to the adaptive synaptic weights of the frontoparietal network in the intact (“control”) system; second, we pruned the synaptic weights by randomly setting 50% of the weights to zero; and third, the gain of the basal ganglia gating signal was reduced to 50% of the control value. Simulation of the APD network model showed that the movement trajectories Computer Models of Atypical Parkinsonism 103 Fig. 6. Simulations of the finger-to-nose test in normal, PD, and APD models. Movement trajectories and joint angles are shown. See videoclip for real-time simulation. were severely affected. The virtual subject showed misreaching to the nose and produced movement paths that varied widely in space. This was reflected in the joint excursions, which were characterized by noisy and asymmetrical flexion and extension ranges, as well as some periods of joint immobility. Thus, simulation of APD had the largest effect on the spatial and temporal aspects of movement coordination. 104 Contreras-Vidal Simulating the Bread-Slicing Gesture in Control, PD, and APD Recent clinical studies suggest that apraxia may be explained in terms of damage to a frontoparietal network involved in reaching and prehension (38). According to Rothi, ideomotor apraxia is characterized by “impairment in the timing, sequencing, and spatial organization of gestural movements” (55). Studies involving patients with PD and APDs, including PSP and CBD, indicate that combined involvement of basal ganglia and cortical networks may underlie the presence of apraxia in these patients (37,38). Moreover, in a group of studies by Leiguarda and colleagues, they found that patients with PD, PSP, and CBD, who tested positive for apraxia in the clinical test, showed larger kinematic abnormalities than those patients who do not show apraxia on clinical examination. However, as discussed initially by Roy, it is still a matter of debate whether these kinematic abnormalities are a result of an apraxia-like impairment or to basic motor control deficits (40). For example, do the basic motor control deficits seen in these clinical populations explain the abnormal kinematic deficits seen in patients with ideomotor apraxia? In the computer simulations that follow we focus on production errors, which are associated with deficits in the programming and execution of gestural movements, like the bread-slicing task. Simulations of higher-order content errors would require modeling of frontal areas related to ideational or conceptual processing, which are not included in the current model. In the model simulations, it is assumed that the planning and control components are disturbed because of the pathology in frontoparietal networks. Figure 7 shows the performance in the ‘bread slicing’ task in a normal virtual subject (Control), and after simulated PD and APD. Both diseases were simulated as in subheading Modeling Hypokinetic Disorders in PD. In the control simulation the slicing gesture, depicted as a continuous dark line, reflected a tight, curvilinear trajectory, which was primarily a result of the repetitive, periodic, shoulder rotations. Elbow and wrist joint angles also showed sustained, periodic patterns albeit of smaller amplitude. Simulation of the parkinsonian network resulted in reduced spatial and temporal accuracy of the slicing movement. This was accompanied by slower and asymmetrical joint oscillations that were maximal for the shoulder joint, but considerably reduced for the wrist joint. In fact, as the slicing gesture was generated, the wrist joint was progressively rotated from ~18° to ~38° (see geometry of the arm in top panel of Fig. 7). Simulation of PSP resulted in large production errors as evidenced by distorted spatial trajectories, some of which left the spatial area for the simulated bread surface. The profiles of the joint angles also resemble those reported in recent studies (see e.g., Fig. 5 in ref. 38). For example, the angular changes of virtual patients with PD and APDs are smaller, irregular, and distorted compared to the simulated control subject. CONCLUSIONS Models of basal ganglia disorders have been advanced in the last two decades. These models have mostly focused on PD, in part because of the computational burden of simulating large-scale models that include multiple brain areas. However, recent computational work on frontal, parietal, cerebellar, and basal ganglia dynamics involved in sensorimotor transformations for reaching provide a window to study widespread pathologies as those seen in APDs. These models can inform the experimentalist about the various potential sources of movement variability in various types of tasks (simple vs sequential, pantomime vs real tool use, kinesthetic vs visual cueing, etc.). Moreover, simulated lesions and interventions can be used to test hypotheses and guide new experiments. For example, we modeled the pharmacokinetics and the pharmacodynamics using a neural network model parameterized by the measurements of the handwriting kinematics of PD patients (12). Other mathematical treatments of the dose–effect relationship of levodopa and motor behavior treat the motor control system as a black-box system and do not provide insights on the mechanisms, although they may still be useful for therapy optimization purposes (56). On the other hand, a biologically inspired, albeit highly simplified neural network model of cortico-basal ganglia dynamics Computer Models of Atypical Parkinsonism 105 Fig. 7. Simulations of the bread-slicing gesture commonly used to test ideomotor apraxia in basal ganglia disorders. Simulations show movement trajectories and joint angles (shoulder, elbow, and wrist) for normal, PD, and APD simulations. See videoclip on accompanying DVD for real-time simulation. during normal and neurological conditions would be valuable to assess which parameters might be most amenable to therapeutic intervention, including individual optimization of pharmacological therapy, while at the same time informing about abnormal mechanisms. Limitations of Current Models of Basal Ganglia Disorders APDs are caused by various diseases, therefore involving a complex neuropathophysiology and a wide spectrum of abnormal behavioral signs. Currently, there is no mathematical or conceptual model that can explain all the symptoms based on abnormal mechanisms within the basal ganglia, cerebellum, and/or cortical areas. This limitation is partially because of the necessary simplification of the neurobiology required to make the model computationally or mathematically tractable for formal investigation. Thus, it is likely that some aspect of any proposed model may be wrong; however, the likelihood of this happening can be minimized by developing a step-by-step reconstruction of the system under study, with each step required to account for additional sources of neural or motor 106 Contreras-Vidal variability. Moreover, manipulations of model components, such as simulated lesions or deep brain stimulation paradigms, are also oversimplifications of the processes occurring in the brain in response to such events. We hope that computational models of basal ganglia disorders will be developed further to help elucidate and account for the complexity of the clinical symptoms seen in PD and APDs, in such a way that these models can guide further theoretical and applied research and foster interactions between clinicians, modelers, and neuroscientists. FUTURE DIRECTIONS A controversial question in apraxia research is the relevance of ideomotor apraxia for real-life action (57). Earlier reports suggested that patients with apraxia may use single objects appropriately even when they are unable to pantomime their use (58,59), whereas other have found the same types of spatiotemporal errors in both object pantomime and during tool use (58) or reported that subjects with ideomotor apraxia, assessed by gesture pantomime, had more errors with tools while eating than matched controls (61). The large-scale neural network presented in this chapter may help to elucidate any potential relationship of ideomotor apraxia to skilled tool use in naturalistic situations. Extension of the large-scale neural network model to include visual and tactile signals produced by the sight and on-line interaction with the object would be critical to answer this question. Another important direction for future work relates to the integration of stored movement primitives (so-called gesture engrams) and dynamic movement features required to produce and distinguish a given gesture from others. Although the simulations of the “slicing” gesture in anapraxic neural network model presented in this chapter were based on degraded sensorimotor transformations for movement, it should also be possible to evaluate the effects of disruptions in the on-line sequential (dynamic) processes underlying the repetitive nature of the slicing task, which were intact in the present simulations. Finally, the hypothetical effects of neuromotor noise in different model components could also be assessed through neural network simulations. ACKNOWLEDGMENTS The author thanks Shihua Wen, University of Maryland’s Department of Mathematics, for running the simulations shown in Figs. 6 and 7. The author’s computational work summarized herein has been supported in part by INSERM and the National Institutes of Health. FIGURES Figures were generated in Matlab and filtered using Abobe Illustrator. MEDIA Procedure Used to Generate the MPEG Files: In the CD disk, there are six mpeg files, the file names represent the simulated tasks, which are described below. The frames in format .avi were generated by the computational model written in MatLab's Simulink. The .avi files are generated by a shareware named "HyperCam" produced by Hypererionics Technology (www.hperionics.com). The mpeg files were obtained using the freeward softward "avi2meg" written by USH (www.ush.de). All the movies are recorded at a rate of 30 frames per second. Description of Movies: Finger-to-nose Control (duration: 1:48): Simulation shows the end-pont trajectories during the finger-to-nose task. A three segments arm is shown. These segments are linked by the shoulder, elbow, and wrist joints. This simulation of an intact (Control) network shows almost linear trajectories. Computer Models of Atypical Parkinsonism 107 Finger-to-nose PD: This movie shows the performance of the computer model after simulating severe PD. In this simulation, the movement becomes slower, discrete, and noisy. Moreover, some of the targeted movements do not reach the nose. Finger-to-nose APD: This movie shows the finger-to-nose simulations after damage to the frontoparietal network involved in sensorimotor trnsformations for reaching, which simulated APD. The end-point trajectories become irregular, coarse, fragmented, and dyscoordinated. Slicing Control: This clip shows a simulation of the "bread slicing" gesture as seen from directly above. The rectangle represents the loaf of bread. Note that there were not constrains on the way the virtual arm was supposed to produce the gesture. Note that during the repetitive movement the wrist joint was initially slightly flexed, but gradually became extended. This illustrates the fact that in a redundant arm there are many possible arm configurations that can be used to move the end point to a spatial target or along a given spatial trajectory. Slicing PD: The PD simulation shows reduced range of motion for all joints, discontinuous movements, and a difficulty in generating the repetitive slicing gesture. In this particular simulation, the wrist is in the extended position from the onset of the movement. Slicing APD: This video shows the slicing gesture task after simulated APD. This simulation shows production errors as the arm fails to move the end point along the desired slicing trajectory. This resulted in highly disrupted spatial and temporal organization. REFERENCES 1. Beiser DG, Hua SE, Houk JC. Network models of the basal ganglia. Curr Opin Neurobiol 1997;7:185–190. 2. Ruppin E, Reggia JA, Glanzman D. Understanding brain and cognitive disorders: the computational perspective. Prog Brain Res 1999;121:ix–xv. 3. Gillies A, Arbuthnott G. Computational models of the basal ganglia. Mov Disord 2000;15:762–770. 4. Amos A. A computational model of information processing in the frontal cortex and basal ganglia. J Cogn Neurosci 2000;12:505–519. 5. Lorincz A. Static and dynamic state feedback control model of basal ganglia-thalamocortical loops. Int J Neural Syst 1997;8:339–357. 6. Wickens JR, Kotter R, Alexander ME. Effects of local connectivity on striatal function: stimulation and analysis of a model. Synapse 1995;20:281–298. 7. Contreras-Vidal JL, Grossberg S, Bullock D. A neural model of cerebellar learning for arm movement control: corticospino-cerebellar dynamics. Learn Mem 1997;3:475–502. 8. Burnod Y, Grandguillaume P, Otto I, Ferraina S, Johnson PB, Caminiti R. Visuomotor transformations underlying arm movements toward visual targets: a neural network model of cerebral cortical operations. J Neurosci 1992;12:1435–1453. 9. Bullock D, Grossberg S, Guenther FH. A self-organizing neural model of motor equivalent reaching and tool use by a multijoint arm. J Cogn Neurosci 1993;5:408–435. 10. Tagamets MA, Horwitz B. Interpreting PET and fMRI measures of functional neural activity: the effects of synaptic inhibition on cortical activation in human imaging studies. Brain Res Bull 2001;54:267–273. 11. Horwitz B, Poeppel D. How can EEG/MEG and fMRI/PET data be combined? Hum Brain Mapp 2002;17:1–3. 12. Contreras-Vidal JL, Poluha P, Teulings HL, Stelmach GE. Neural dynamics of short and medium-term motor control effects of levodopa therapy in Parkinson’s disease. Artif Int Med 1998;13:57–79. 13. Bower JM. Modeling the nervous system. TINS 1992;15:411–412. 14. Schultz W, Dayan P, Montague R. A neural substrate of prediction and reward. Science 1997;275:1593–1599. 15. Contreras-Vidal JL, Schultz W. A predictive reinforcement model of dopamine neurons for learning approach behavior. J Comput Neurosci 1999;6:191–214. 16. Nakahara H, Doya K, Hikosaka O. Parallel cortico-basal ganglia mechanisms for acquisition and execution of visuomotor sequences—A computational approach. J Cogn Neurosci 2001;13:626–647. 17. Suri R, Schultz W. Learning of sequential movements by neural network model with dopamine-like reinforcement signal. Exp Brain Res 1998;121:350–354. 18. Contreras-Vidal, JL. The gating functions of the basal ganglia in movement control. In: JA Reggia, E Ruppin, DL Glanzman (eds.). Progress in Brain Research. Disorders of Brain, Behavior and Cognition: the Neurocomputational Perspective. Amsterdam: Elsevier, 1999:261–276. 19. Humphries MD, Gurney KN. The role of intra-thalamic and thalamocortical circuits in action selection. Network 2002;13:131–156. 108 Contreras-Vidal 20. Gurney K, Prescott TJ, Redgrave P. A computational model of action selection in the basal ganglia. II. Analysis and simulation of behaviour. Biol Cybern 2001;84:411–423. 21. Beiser D, Houk J. Model of cortical-basal ganglia ganglionic processing: encoding the serial order of sensory events. J Neurophysiol 1998;79:3168–3188. 22. Fukai T. Sequence generation in arbitrary temporal patterns from theta-nested gamma oscillations: a model of the basal ganglia-thalamo-cortical loops. Neural Netw 1999;12:975–987. 23. Berns GS, Sejnowski TJ. A computational model of how the basal ganglia produce sequences. J Cogn Neurosci 1998;10:108–121. 24. Contreras-Vidal JL, Stelmach GE. A neural model of basal ganglia–thalamocortical relations in normal and Parkinsonian movement. Biol Cybern 1995;73:467–476. 25. Connolly CI, Burns JB, Jog MS. A dynamical-systems model for Parkinson’s disease. Biol Cybern 2000;83:47–59. 26. Suri RE, Albani C, Glattfelder AH. A dynamic model of motor basal ganglia functions. Biol Cybern 1997;76:451–458. 27. Borrett DS, Yeap TH, Kwan HC. Neural networks and Parkinson’s disease. Can J Neurol Sci 1993;20:107–113. 28. Litvan I. Recent advances in atypical parkinsonian disorders. Curr Opin Neurol 1999;12:441–446. 29. Yekhlef F, Ballan G, Macia F, Delmer O, Sourgen C, Tison F. Routine MRI for the differential diagnosis of Parkinson’s disease, MSA, PSP, and CBD. J Neural Transm 2003;110:151–169. 30. Schrag A, Kingsley D, Phatouros C, et al. Clinical usefulness of magnetic resonance imaging in multiple system atrophy. J Neurol Neurosurg Psychiatry 1998;65:65–71. 31. Schrag A, Good CD, Miszkiel K, et al. Differentiation of atypical parkinsonian syndromes with routine MRI. Neurology 2000;54:697–702. 32. Kraft E, Schwarz J, Trenkwalder C, Vogl T, Pfluger T, Oertel WH. The combination of hypointense and hyperintense signal changes on T2-weighted magnetic resonance maging sequences: a specific marker of multiple system atrophy? Arch Neurol 1999;56:225–228. 33. Savoiardo M, Strada L, Girotti F, Zimmerman RA, Grisoli M, Testa D, Petrillo R. Olivopontocerebellar atrophy: MR diagnosis and relationship to multisystem atrophy. Radiology 1990;174:693–669. 34. Savoiardo M, Grisoli M, Girotti F, Testa D, Caraceni T. MRI in sporadic olivopontocerebellar atrophy and striatonigral degeneration. Neurology 1997;48:790–792. 35. Horimoto Y, Aiba I, Yasuda T, et al.Cerebral atrophy in multiple system atrophy by MRI. J Neurol Sci 2000;173:109–112. 36. Fahn S, Green PE, Ford B, Bressman SB. Handbook of Movement Disorders. London: Blackwell Science, 1997. 37. Leiguarda RC, Marsden CD. Limb apraxias: higher-order disorders of sensorimotor integration. Brain 2000;123:860–79. 38. Leiguarda R, Merello M, Balej J, Starkstein S, Nogues M, Marsden CD. Disruption of spatial organization and interjoint coordination in Parkinson’s disease, progressive supranuclear palsy, and multiple system atrophy. Mov Disord 2000;15:627–640. 39. Litvan I. Progressive supranuclear palsy and corticobasal degeneration. Baillieres Clin Neurol 1997;6:167–185. 40. Roy EA. Apraxia in diseases of the basal ganglia. Mov Disord 2000;15:598–600. 41. Bullock D, Grossberg S. Neural dynamics of planned arm movements: emergent invariants and speed-accuracy properties during trajectory formation. Psychol Rev 1988;95:49–90. 42. Anderson ME, Horak FB. Influence of the globus pallidus on arm movements in monkeys. III. Timing of movementrelated information. J Neurophysiol 1985;54:433–448. 43. Brotchie P, Iansek R, Horne MK. Motor function of the monkey globus pallidus. 1. Neuronal discharge and parameters of movement. Brain. 1991;114:1667–1683. 44. Cheruel F, Dormont JF, Amalric M, Schmied A, Farin D. The role of putamen and pallidum in motor initiation in the cat. I. Timing of movement-related single-unit activity. Exp Brain Res 1994;100:250–266. 45. Georgopoulos AP, DeLong MR, Crutcher MD. Relations between parameters of step-tracking movements and single cell discharge in the globus pallidus and subthalamic nucleus of the behaving monkey. J Neurosci 1983;3:1586–1598. 46. Mink JW, Thach WT. Basal ganglia motor control. I. Nonexclusive relation of pallidal discharge to five movement modes. J Neurophysiol 1991;65:273–300. 47. Nambu A, Yoshida S, Jinnai K. Movement-related activity of thalamic neurons with input from the globus pallidus and projection to the motor cortex in the monkey. Exp Brain Res 1991;84:279–284. 48. Neafsey EJ, Hull CD, Buchwald NA. Preparation for movement in the cat. II. Unit activity in the basal ganglia and thalamus. Electroencephalogr Clin Neurophysiol 1978;44:714–723. 49. Turner RS, Anderson ME. Pallidal discharge related to the kinematics of reaching movements in two dimensions. J Neurophysiol 1997;77:1051–1074. 50. Contreras-Vidal JL, Buch ER. Effects of Parkinson’s disease on visuomotor adaptation. Exp Brain Res 2003;150:25–32. 51. Buch ER, Young S, Contreras-Vidal JL. Visuomotor adaptation in normal aging. Learn Mem 2003;10:55–63. 52. Inoue K, Kawashima R, Satoh K, et al. A PET study of visuomotor learning under optical rotation. Neuroimage 2000;11:505–516. 53. Balslev D, Nielsen FA, Frutiger SA, et al. Cluster analysis of activity-time series in motor learning. Hum Brain Mapp 2002;15:135–45. Computer Models of Atypical Parkinsonism 109 54. Klockgether T, Borutta M, Rapp H, Spieker S, Dichgans J. A defect of kinesthesia in Parkinson’s disease. Mov Disord 1995;10:460–465. 55. Rothi LJG, Ochipa C, Heilman KM. A cognitive neuropsychological model of limb praxis. Cogn Neuropsychol 1991;8:443–458. 56. Hacisalihzade SS, Mansour M, Albani C. Optimization of symptomatic therapy in Parkinson’s disease. IEEE Trans Biomed Eng 1989;36:363–372. 57. Buxbaum LJ. Ideomotor apraxia: A call to Action. Neurocase 2001;7:445–458. 58. Poizner H, Mack L, Verfaellie M, Rothi LJ, Heilman KM. Three-dimensional computer graphic analysis of apraxia. Neural representations of learned movement. Brain 1990;113:85–101. 59. Liepmann H. The left hemisphere and action. London, Ontario: University of Western Ontario, 1905. 60. De Rensi E, Motti F, Nichelli P. Imitating gestures. A quantitative approach to ideomotor apraxia. Arch Neurol 1980;37:6–10. 61. Foundas AL, Macauley BL, Raymer AM, Maher LM, Heilman KM, Gonzalez Rothi, LJ. Ecological implications of limb apraxia: evidence from mealtime behavior. J Int Neuropsychol Soc 1995;1:62–66.