B033 CLOSED-LOOP WATERFLOODING
advertisement

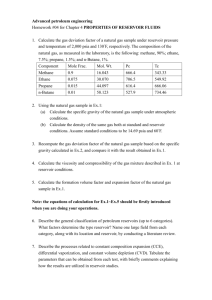
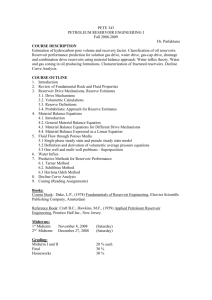
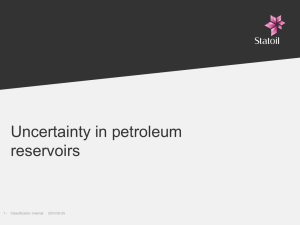
1 B033 CLOSED-LOOP WATERFLOODING ‡ † K.M. OVERBEEK*, D.R. BROUWER* , G. NAEVDAL , C.P.J.W. VAN KRUIJSDIJK* , J.D. JANSEN* *Delft University of Technology, Dept of Geotechnology, PO box 5028, 2600 GA Delft, The Netherlands † Shell International Exploration and Production, Exploratory Research, PO box 60, 2280 AB Rijswijk ‡ RF – Rogaland Research, Thormøhlensgate 55, N-5008 Bergen, Norway Abstract Closed-loop waterflooding involves the combined use of model-based optimization techniques and data assimilating techniques, which are used to maximize ultimate recovery or net-present value (NPV) and to update the reservoir model during the producing life of the reservoir. In particular we used Optimal Control Theory (OCT) in combination with an Ensemble Kalman Filter (EnKF) to perform closed-loop water flooding. Testing the effectiveness of the closed-loop approach was done on a synthetic reservoir model (SRM), mainly because of repeatability and time aspects. We used the SRM to generate synthetic data such as production measurements and time-lapse seismics. As a first step we used simple, two-dimensional models to demonstrate the feasibility of this workflow, i.e. the use of closed-loop reservoir management techniques combined with a SRM. We used a commercial reservoir simulator as the SRM, and an in-house Matlab reservoir model for the OCT and EnKF. The EnKF uses an ensemble of model representations to update the permeability field and the states (pressures and saturations) of the reservoir from ‘measured’ pressures from the SRM. OCT is then applied, using the most recently estimated permeability field, to optimize injection and production rates in a fixed configuration of wells. We obtained an increase in NPV of 29% after injecting one pore volume, as a result of a higher oil production (increase of 20%) and a lower water production (decrease of 34%). The estimated permeability field revealed the main heterogeneities of the SRM. The use of the SRM allowed for rapid testing of different varieties of OCT and EnKF techniques. 1 Introduction In order to establish the most favorable development and management of a hydrocarbon reservoir, we usually use a numerical reservoir model. These models are a crude approximation of reality and frequently contain a large amount of uncertainties. History matching is a way to adapt the parameters of the model, but it is usually done on a campaign basis, for example, once every five years. With data assimilation techniques we can shift from a campaign-based ad-hoc history matching procedure to a near-continuous systematic updating of the reservoir parameters based on data from different sources during the producing life of the reservoir. In our study we have only used pressure and flowrate measurements as data, but the scope for expansion in data sources is wide, e.g. the use of time-lapse seismics or passive seismics. In a numerical model for water flooding we can systematically optimize reservoir production strategies by using smart field technology, in particular when we use model- based optimization techniques to steer the waterfront in the reservoir and in this way optimize the ultimate recovery or net-present value (NPV). In this study we will combine model-based optimization techniques and data assimilating techniques. In particular we will use Optimal Control Theory (OCT) as described by Brouwer et al. [1], in combination with an Ensemble Kalman Filter (EnKF) to perform closed-loop water flooding. The EnKF uses an ensemble of model representations to update the reservoir states (pressures and saturations) and parameters (permeabilities), and the associated model uncertainty. With the most recent updated states and parameters, we will then apply OCT to optimize injection and production controls in a fixed configuration of wells. The pressure measurements from downhole 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 2 gauges are used as data for the EnKF to estimate the states and the permeability field, the OCT assigns the control settings to the surface chokes. Earlier studies on estimating permeability fields with EnKF by Naevdal et al. [2] and maximizing recovery with OCT by Brouwer et al. [1] have shown promising results, and a first step of combining the two techniques was described by Brouwer et al. [3]. Testing the effectiveness of closed-loop reservoir management was done on a synthetic reservoir model (SRM), an environment that represents the real asset, because of repeatability and time aspects. In contrast to a related study by Brouwer et al. [3], which used the same (low-order) model for the SRM as the reservoir model, we are using a high-order, commercial reservoir model for the SRM and a low-order, in-house Matlab reservoir model with which we perform the EnKF and the OCT. 2 Role of the synthetic reservoir model in closed-loop reservoir management The SRM is a numerical model that, as closely as feasible, represents the real reservoir, and has all the relevant parameters and characteristics of the real reservoir. The benefits of using a SRM instead of a real reservoir are mainly repeatability and time aspects. Of course, the use of a numerical model to test another numerical model (the reservoir simulator) can be questioned. The SRM is a numerical approximation of the truth and not reality. If the number of states in the SRM is large with respect to the number of states of the reservoir simulator, which is used for optimization, we feel that this approach can be justified as a first step in this research. Similar SRM approaches are also used in e.g. Saputelli et al. [4]. Just as for a reservoir in reality, the parameters of the SRM before the start of production are known to a limited extent to the user of the reservoir simulator that is used for the optimization. When we start producing, we obtain production data from the wells. The wells in the SRM are controlled by surface chokes and are monitored by downhole gauges and multiphase flow meters. The flow and pressure measurements are the main data sources for data assimilation in this project. The SRM, after running for a certain period, gives us ‘measured’ output, which is used with the EnKF to obtain updated states of the reservoir model. These updated states are used in the OCT to control the rates and optimize the NPV of the reservoir simulator and thus the SRM. The closed-loop procedure can be illustrated by figure 1 and 2. 1. asset Synthetic Virtual reservoir model Noise Input Controllable input Output Outpu High-order System reservoir model Output Noise 3. Optimization Control algorithms Sensor models Low-order reservoir model 4. Measured output Parameter updating 5. Fig. 1– Schematic overview of closed-loop reservoir management. 3 2. Run the simulation for the synthetic reservoir model for a certain period. Obtain measurement data. Create an ensemble of model representations, and run the forward simulation until the time of measurement. Perform the EnKF with the measurement data and the ensembles. Obtain ensemble of analyzed states. (Parameter updating in figure 1). Perform optimal control with most recent analyzed states. Obtain new controls for injection and production wells. (Optimization in figure 1). Constrain the SRM with the new controls, run it for another certain period, obtain new measurement data and continue with step 3. Fig. 2 – Closed-loop procedure. Ensemble Kalman filter We use an EnKF for continuous updating of the reservoir model by using measured data. The EnKF is a variation of the original Kalman filter, a set of mathematical equations that provides an efficient computational (recursive) solution of the least-squares method [5]. The EnKF computations are based on an ensemble of realizations of the reservoir model. The filter consists of sequentially running a forecast step, followed by an analysis step. During the forecast step the reservoir simulator is run for each of the model realizations up to the time where new measurements become available. With these measurements, all realizations in the model are updated by combining the new real measurements with forecasts from the ensemble, which happens during the analysis step. In the Kalman filter the CLOSED-LOOP WATERFLOODING 3 ensemble members are propagated in time by the non-linear dynamic system eq. (5) which represents the reservoir model and which is defined in terms of the state vector x containing oil pressures and water saturations. In our implementation of the Kalman filter we also treat the permabilities as unknowns, which leads to the use of an extented state vector x , containing oil pressures, water saturations and permeabilities. The extended state vector after running the N th forecast step is denoted f a x N 1 , after the analysis step x N . To initialize the filter we generate a random initial ensemble, with a specified mean and covariance matrix. The mean value of the initial ensemble should preferably be a good estimate of the initial true state, and therefore the mean is based on well data. The members of the ensemble are drawn randomly assuming a Gaussian distribution, with a predefined spatial correlation length. A more detailed explanation of the generation of the initial ensemble can be found in Naevdal et al. [2]. The analyzed state can be calculated as the mean of the analyzed ensemble, because the true state can be approximated by the mean of the ensemble 1 N ª a f obs f (1) x N 1 ¦ x N 1i K N 1 y N 1 Cx N 1i º¼ , N i 1¬ obs where N is the sample size of the ensemble, y N 1i is the observed measurement including measurement noise, C is a matrix that selects from the extended state vector only the pressures in the wells and K is the Kalman gain f f K N 1 P N 1 CT CP N 1 CT R N 1 1 . (2) f Here, P N 1 is the forecasted error covariance matrix for the states of the system and R N 1 is the covariance matrix for the measurement errors. The error covariance matrix that we need for computing the Kalman gain can be calculated as P N 1 where L N 1 f f L N 1 f T L N 1 f , (3) ª x N 1 f x N 1 f , ! , x N 1 f x N 1 f º and N 1 ¼ N 1 ¬ 1 a x 1 N ¦ xi . N i1 f The analyzed covariance error matrix P N 1 can be computed similarly as P N 1 . For a more detailed description of EnKF see Evensen [6] and Naevdal et al. [2]. 4 Optimal control theory This short introduction to OCT is largely based on Brouwer et al. [1]. Optimal control is a gradientbased optimization technique that allows us to find those values of the input variables u that minimize or maximize a certain objective function $ . The gradients are obtained with the aid of an adjoint or co-state equation in terms of Lagrange multipliers which represent the objective functions’s sensitivities to changes in the state variables. In our study, the objective function $ represents the net-present value (NPV) K 1 K 1 ª N prod r q º o o k n rw qw k n k ¦« ¦ $¦ $ (4) » 't k , a k 0 k 0« n 1 1 b /100 ¬ ¼» where r is the price per unit volume, q is the flow rate, b is the annual interest rate, a is the number of years since the start of production, ǻt is the time interval corresponding to timestep k, K is the total number of time steps, and Nprod is the number of production wells. To derive the influence of changes in u on the magnitude of $ , we need to work out the changes in x first, because $ is a function of x, while x is a function of the input variable u. The problem we have stated here can be interpreted as a constrained optimization problem, where the constraint is the dynamic system g x k 1 , x k , u k 0 , (5) which represents the reservoir model and specifies the relation between x and u. In short, the solution to the constrained optimization problem is as follows. First, the dynamic system (eq. (5)) is included as a constraint with the aid of a vector of Lagrange multipliers Ȝ in the objective function $ . We derive the modified objective function $ : 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 4 K 1 $ ª$ x k , u k Ȝ k 1T g x k 1 , x k , u k º ¦ ¬ ¼ k 0 K 1 ¦ k , (6) k 0 is an auxiliary variable known as the Hamiltonian. It is then possible to express the effect where of a small change in u on the value of (and therefore the value of $ ) provided the Lagrange multipliers obey a system of ‘adjoint’ differential equations which can be derived through taking the first variation of eq. (6) and reorganising the results leading to 1 ª w$ k º § wg k 1 · T T T wg k (7) Ȝ k Ȝ k 1 ¸ , with final condition Ȝ K 0 . « »¨ wx k ¬« wx k ¼» ©¨ wx k ¹¸ After a forward integration of the dynamic system (5) we can integrate equations (7) backward in time, and when all the Lagrange multipliers have been calculated, we can calculate G $ T § w k · G uk ¦ ¨¨ ¸¸ k 0 © wu k ¹ K 1 G$ T ª w$ k T wg k º Ȝ k 1 « » G uk . ¦ wu k ¼» k 0¬ « wu k K 1 (8) Eq. (8) shows the first order change in the objective function resulting from a change in the input vector u. It can be shown that in a constrained optimum reaches a maximum, and we used the steepest ascent method to find the corresponding (local) optimal value of u: w k , (9) u k new u k old H wu k where H is a factor determining the optimal change in u along the search direction w Brouwer et al. [1]. 5 5.1 wu ; see Examples and results Project setup To represent the SRM, we`used a two-dimensional, horizontal, two-phase, high-order reservoir model, implemented in commercial reservoir simulation software. The reservoir parameters have been displayed in table 1. Porosity Permeability Oil density Water density Initial oil pressure Initial water saturation Connate water saturation Residual oil saturation ij k ȡo ȡw po,ini Sw,ini Swc Sor [-] [mD] [kg/m3] [kg/m3] [MPa] [-] [-] [-] 0.2 200 – 10000 1000 1000 80 0.1 0.1 0.1 Table 1 – Reservoir parameters. We assumed the compressibility of the fluids to be constant at a value of 10-10 1/Pa. The formation volume factors were also kept constant at a value of 1. The viscosity of the water and the oil were set to 10-3 Pa s. The permeability field, depicted in figure 3, ranged from 200 mD to 10000 mD. There were 10 vertical injection and 10 vertical production wells, located at opposite sides at the borders of the reservoir. The wells were operated under voidage replacement at constant field rates of 2600 m3/day, and we assumed that they were rate-controlled by surface chokes, and monitored by downhole pressure gauges and surface multiphase flow meters. The accuracy of well-callibrated gauges according to various manufacturer is around 0.01 MPa (see table 2). However we used a value of 0.5 MPa to account for additional operational error sources. The accuracy of the flow meters was not quantified explicitly, but was accounted for in the model error. The SRM was 1100 by 1100 meters wide, with a depth of 10 meters, discretized using 110 by 110 by 1 grid blocks such that the amount of states (pressures and saturations) in the SRM was 24200. CLOSED-LOOP WATERFLOODING 5 10000 Injection well Production well 200 Fig. 3 – Top-view of the SRM. Permeability field [200 – 10000 mD]. Fig. 4 – Top-view of the low-order, in-house Matlab reservoir model. Manufacturer Range Accuracy 0 – 68.9 MPa 0.1 % full scale 0.07 – 140 MPa 21 kPa full scale 10.3 – 138 MPa 0.05 % full scale 0 – 138 MPa 0.02 % full scale Tubel Technologies [7] Roxar [8] Senz-it [9] Calsan [10] Product In-Line Real Time Downhole Wireless Gauge Roxar Quartz Pressure and Temperature Gauges (RQPG) Real Time Pressure Temperature Module (RTPT) Wolvirine Quartz Gauge Table 2 – Accuracy of various downhole pressure gauges. The low-order, in-house Matlab reservoir model, represented by eq. (5) that we used for EnKF and OCT was a two-dimensional, horizontal, two phase reservoir model. We assumed all the reservoir properties, except the permeability, to be known. The PVT data and relative permeabilities were also known. The model had 10 injectors and 10 producers at opposite sides, as shown in figure 4. The rates in the wells were set equal to the rates in the corresponding SRM wells, i.e. to a total field rate of 2600 m3/day. Because the wells were assumed to be rate-constrained, no well models were used. The model had a dimension of 1100 by 1100 by 10 meters, discretized in 10 by 10 by 1 grid blocks. The ensemble for the EnKF consisted of 100 members. Because we updated the permeability field of the reservoir model with the EnKF, we had to use an initial ensemble of (ln-)permeability fields. These fields were based on the permeability values from the wells in the SRM and were randomly generated using a pre-defined spatial correlation length of 2 grid blocks with a standard deviation of 0.1 grid blocks. The standard deviation for the generation of the ln-permeability field was 0.5 ln-mD. 5.2 Results We applied the filter to take into account the information gained from 20 measurements at each assimilation, one for each production well and one for each injection well. The measurements were the bottom hole pressures from the 20 wells and were generated after 2, 4, 7, 9, 11, 23, 46, 69, 92, 116, 231, 463 and 694 days. We finished the simulation after 750 days. The time span of producing for 750 days was based on the reference case, in which we flooded the SRM with one pore volume of water assuming constant pressure in the wells. (In the reference case, we choose the rates in the wells depending on the permeability in the neighbouring gridblocks to achieve an almost constant pressure situation. The corresponding rates were equal to the rate at t 0 days depicted in figure 5d.) The water and oil saturations resulting from the conventional flooding strategy are shown in figure 5a. In figure 5b we present the outcome of the optimized case after 0, 46, 116, 463 and 750 days of optimized flooding of the SRM. In figure 5c the estimated permeability field of the reservoir model is shown. The estimated permeability ranges from 20 to 7000 mD. The initial permeability field (figure 5c at t = 0 days) ranges from 640 to 800 mD. Figure 5d shows the injection rates for the SRM at the different measurement times. The initial injection for the optimized case is also based on a constant pressure in the wells, like in the reference case. In figure 6a and 6b the oil and water rates and the cumulative production of the reference case versus the optimized case are shown. 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 6 a. Saturations for conventional water flooding (white = oil, black = water). b. Saturations for optimized water flooding with estimated permeability field (white = oil, black = water). c. Estimated permeability field [20 (white) – 7000 (black) mD]. 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 1 1 1 1 1 1 2 2 2 2 2 3 3 3 3 3 4 4 4 4 4 5 5 5 5 5 6 6 6 6 6 7 7 7 7 7 8 8 8 8 9 9 9 9 9 10 10 10 10 10 2 3 4 5 6 7 8 9 10 d. Injection rates. The total injection rate is constant and 2600 m3/day. 8 Fig. 5 – Saturations, permeability field and injection rates at times t = 0, 46, 116, 463 and 750 days. 3000 1600000 1400000 2500 1200000 cumulative production [m3] rate [m3/day] 2000 1500 1000 1000000 800000 600000 400000 opt oil opt wat ref oil ref wat 500 opt oil opt wat ref oil ref wat 200000 0 0 0 100 200 300 400 500 600 700 800 0 100 200 time [days] 300 400 500 600 700 800 time [days] Fig. 6a – Oil and water rates as a function of time. Fig. 6b – Cumulative oil and water production as a function of time. The NPV (eq. 4) was calculated with a revenue of produced oil, ro, of $80 per m3, the cost of the produced water, rw, was $20 per m3. The costs of water injection were disregarded. We used an annual interest rate of zero, b 0 , thus the results are non-discounted NPVs. The economic results are shown in table 3. CLOSED-LOOP WATERFLOODING 7 Results after 750 days reference case NPV cum oil cum waterrecovery tot PV [$] [m3] [-] [%] [-] 8.44E+07 1.23E+06 7.16E+05 64% 1.01 Normalised results after 750 days reference case NPV cum oil cum waterrecovery tot PV [-] [-] [-] [-] [-] 1.00 1.00 1.00 1.00 1.00 optimized case NPV cum oil cum waterrecovery tot PV [$] [m3] [-] [%] [-] 1.09E+08 1.48E+06 4.71E+05 76% 1.01 optimized case NPV cum oil [-] [-] 1.29 1.20 cum waterrecovery tot PV [-] [-] [-] 0.66 1.20 1.00 Table 3 – Results after 750 days for the reference case and the optimized case. Conclusions x x x x x x Combining model-based optimization and data assimilation to perform closed-loop water flooding gave promising results for both optimizing NPV and estimating heterogeneities in the reservoir. The dynamic optimization led to a distinct increase in NPV compared to the reference case. This was due to a significant increase in oil production and an even more significant decrease in water production. With EnKF we were able to tune the state variables and the permeability of the reservoir model. The main heterogeneities in the estimated permeability fields, corresponding to the heterogeneities in the SRM, were rapidly recovered. It is important that the generation of the initial permeability fields correctly reflects the uncertainty. It is not straightforward to obtain an adequate initial ensemble, but it is essential for realistic results. Therefore, more research has to be done on this part in the future. Accounting for modeling errors is crucial, especially since we are working with a reservoir model to influence the flow in a real asset or synthetic reservoir model. Adding modeling errors influences the uncertainty in the states. The nature and magnitude of the model errors require further investigation. The use of the SRM allowed for rapid testing of different varieties of OCT and EnKF techniques. Nomenclature a b C g k k N K K $ L p P 9th = time, t, a = annual interest rate = measurement matrix = non-linear vector function = Hamiltonian, M, $ = simulation time step = permeability, L2, m2, mD = measurement time step = final time step = Kalman gain matrix = objective function (cost function), M, $ = left factor of covariance matrix P = pressure, m/(L t2), Pa, bar = covariance matrix of model uncertainty = flow rate, 1/t, L3/t, 1/s, m3/day = price per unit volume M/L3, $/m3 = covariance matrix of measurement error = saturation = input (control) vector = state vector = measurement vector = time interval, t, s q r R S u x y ǻt H ȡ ij Ȝ 0 = weighting factor = density, m/L3, kg/m3 = porosity = vector of Lagrange multipliers = null vector European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 8 Subscripts Superscripts i ini inj n o or prod w wc a f obs t = index (ensemble members) = initial = injector = index (number of wells) = oil = residual oil = producer = water = connate water = analyzed (aposteriori) = forecasted (apriori) = observed = true References [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] Brouwer, D.R. and Jansen, J.D.: “Dynamic optimization of water flooding with smart wells using optimal control theory”, paper SPE 78278 presented at the SPE European Petroleum Conference, Aberdeen, U.K., 29-31 October 2002. Naevdal, G., Johnsen, L.M., Aanonsen, S.I., Vefring, E.H.: “Reservoir monitoring and continuous model updating using Ensemble Kalman filter”, paper SPE 84372 presented at the SPE Annual Technical Conference and Exhibition, Denver, USA, 5-8 October 2003. Brouwer, D.R., Naevdal, G., Jansen, J.D., Vefring, E.H., van Kruijsdijk, C.P.J.W.: “Improved reservoir management through optimal control and continuous model updating”, paper SPE 90149 accepted for presentation at the SPE Annual Technical Conference and Exhibition in Houston, USA, 26-29 September 2004. Saputelli, L., Nikolaou, M., Economides, M.J.: “Self-learning reservoir management,” paper SPE 84064 presented at the SPE Annual Technical Conference and Exhibition, Denver, USA, 5-8 October 2003. Welch, G. and Bishop, G.: “An introduction to the Kalman Filter”, UNC-Chapel Hill, TR 95041, March 2002. Evensen, G.: “Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics”, J. Geophys. Res., 99: 10, 143-10, 162, 1994. Tubel Technologisch, Inc.: Wireless gauges, Inline Real Time Downhole Wireless Gauge. http://www.tubeltechnologies.com Roxar: Production Management, Proven Permanent Downhole Monitoring System (PDMS), Roxar Quartz Pressure and Temperature Gauges (RQPG). http://www.roxar.com. Senz-it: Real Time Pressure Temperature Module (RTPT). http://www.senz-it.com. Calsan: Products, Quartz Downhole Gauges, Wolvirine. http://www.calsan.net. CLOSED-LOOP WATERFLOODING