Estimation of the accuracy of PIV direct numerical simulation of

I
NSTITUTE OF
P
HYSICS
P
UBLISHING
Meas. Sci. Technol. 12 (2001) 1–10
M
EASUREMENT
S
CIENCE AND
T
ECHNOLOGY www.iop.org/Journals/mt PII: S0957-0233(01)22059-1
Estimation of the accuracy of PIV treatments for turbulent flow studies by direct numerical simulation of multi-phase flow
B Lecordier, D Demare, L M J Vervisch, J R´eveillon and M Trinit´e
UMR CNRS 6614 CORIA, Universit´e et INSA de Rouen, 76821 Mont Saint Aignan, France
E-mail: bertrand.lecordier@coria.fr
Received 16 February 2001, in final form and accepted for publication
10 July 2001
Abstract
An original method, based on the direct numerical simulation (DNS) of two phase flows, is proposed to evaluate the capability for the PIV algorithms to measure turbulence properties. 3D particle fields are produced from the
DNS and are used to generate synthetic images with well-defined flow properties. The imposed velocities in the synthetic images are evaluated thanks to different PIV algorithms and these results can be compared with the initial conditions of simulation.
The first part of the present paper describes the synthetic image generator and the DNS of two phase flows. The second part is focused on the analysis of synthetic images of homogeneous turbulence by using two different PIV algorithms: a conventional PIV algorithm and a ‘sub-pixel’ iterative approach.
Keywords:
PIV, fluid flow velocity, turbulence, laser diagnostic, direct numerical simulation, fluid dynamics
Sunrise Setting
Marked Proof
MST/122059/FEA
23676p
Printed on 17/7/1 at 14.29
1. Introduction
The digital particle image velocimetry technique has experienced important improvements during the last five years (new high resolution CCD camera, development of advanced PIV algorithms).
These different improvements led the researchers to apply this optical diagnostic to study various complex flows such as turbulent flows.
During the initial stage of development, particle image velocimetry was mainly devoted to studying large unsteady structures in the flows and no detailed information was extracted from the measured vector maps.
Nowadays, it seems that this optical diagnostic can afford more detailed information about the flow such as the length scales, velocity fluctuation, spectrum
, . . .
. Nevertheless, the intrinsic limitations of the
PIV technique to measure turbulence parameters are not well known yet. Various experimental studies using welldefined flow fields such as grid turbulence, wind tunnel or pipe flow have been used to try to evaluate the capability of the PIV technique to extract information from turbulent PIV vector maps. Nevertheless, from these studies, it is always difficult to know which advanced PIV treatment is the most accurate or the most appropriate to measure a given flow characteristic. Indeed, with experimental parameters such as the energy spectrum or scales of turbulence never being known with sufficient accuracy, the comparison of PIV treatments is difficult and, then, it becomes tricky to favour one treatment rather than another. In addition, from experimental validations, it is quite difficult to isolate which experimental parameter
(seeding density, particle size
, . . .
) is the more restrictive for the accuracy of the PIV technique.
In the present work, we propose a fully digital approach to evaluate the capability of different PIV treatments to measure turbulent velocity fields and resolve their characteristics.
This procedure is based on the use of synthetic images of particles with imposed velocity fields. This technique consists of creating a first synthetic image from a digital particle field (cf figure 1) and moving the particle field by known displacements in order to create the second image of the particle. The displacement between two particle fields can be
0957-0233/01/010001+10$30.00
© 2001 IOP Publishing Ltd Printed in the UK 1
B Lecordier et al
Figure 1. Schematic view of the PIV validation by using synthetic image of particles.
either simple analytic functions [1–3] (translation, sinusoidal wave, solid vortex, Ossen vortex
, . . .
) or more realistic flow fields [4].
In a strict sense, the use of synthetic images cannot be regarded as a real experiment because it is very difficult to simulate all the phenomena involved in the image acquisition process (various noise sources, optical distortion
, . . .
). Nevertheless, the use of synthetic images is complementary to real experiments because it is a powerful way to study the effect of a given parameter (particle density, particle size, velocity gradient
, . . .
) on the accuracy of velocity measurement and also to estimate the intrinsic limitation of a
PIV algorithm [1–3, 5, 6]. Indeed, if a PIV algorithm is not able to measure with accuracy imposed velocity fields from an ideal situation such as synthetic images, we are convinced that it will not be appropriate to study real flows with comparable characteristics. The reverse remark is unfortunately not true, but we think that an approach based on synthetic images can bring significant knowledge about the ability of different PIV algorithms to measure for instance turbulent flow properties.
In the present work, to evaluate the capability of different
PIV treatments to measure turbulent velocity fields, we have created synthetic images of particles with imposed turbulent flow properties. An overview of the validation procedure from synthetic images is presented in figure 1.
The PIV technique can be applied to study a wide range of turbulent flow but, in the present paper, we have focused our attention on the capability of the PIV technique to measure isotropic and homogeneous turbulence characteristics.
In order to produce synthetic images of particles with welldefined and realistic turbulence properties, we have used direct numerical simulation of two phase flow. One of the originalities of this work is to produce synthetic images directly from 3D particle fields transported by the gas flow of the simulation. As this simulation includes for each time step the displacement of the 3D particle field, the trajectory of each individual particle is resolved.
Then, the synthetic images are produced from particles with realistic trajectory and, in contrast to similar works based on direct numerical simulation of one phase, we do not need to assimilate the particle displacement by the vector tangential to the particle trajectory. This point is of prime importance to study the effect of the time separation between images on the accuracy of the
PIV technique.
The next two sections present the synthetic image generator and the direct numerical simulation of two phase flow.
The last section is devoted to a comparison of two different PIV treatments to measure turbulence properties: the conventional cross-correlation technique and an iterative sub-pixel translation [3, 7].
For these two treatments, the PIV results are compared with the initial flow conditions (mean velocity, intensity fluctuation, dissipation rate, energy spectrum , . . .
) and significant differences to measure turbulence properties are highlighted.
2
Direct numerical simulation to evaluate the accuracy of PIV treatments using known displacements and then create the second image of the particle (figure 1).
The particle displacements can be obtained from a simple analytic equation (e.g. uniform translation, rotation
, . . .
) or in more complex ways such as direct numerical simulation.
3. Displacement of particles by direct numerical simulation
Figure 2. Principle of synthetic image generator.
2. Synthetic image generator
In order to evaluate and compare different PIV algorithms from a fully digital approach, the first stage consists in developing specific programs which produce synthetic images of particles as realistically as possible. Much care has to be taken to create such images permitting us to perform accurate comparisons.
Our synthetic image generator is based on the use of 3D particle fields. A slice of thickness e crossing the 3D particle fields defines the volume intercepted by the laser sheet in a real
PIV experiment. All the particles included in this volume are imaged at right angles to produce the final synthetic image of the particles (figure 2). The main difficulty of the synthetic image generator is the way to turn the particle located at
(x, y, z) into grey level signals. In the simulation, all the particles are independent and the particle signals are added to the synthetic image without interference. Each particle makes a symmetric 2D Gaussian light spot on the CCD and the grey level of each pixel is given by the signal integration of all the particle spots. In order to simulate phenomena such as the laser sheet profile and the out-of-focus effect, during the image creation procedure numerous parameters can be adjusted. The main parameters are the size of particle spot, the thickness and light profile of the laser sheet, the density of particles
, . . .
. The complete description of the synthetic image generator can be found in [7].
In the present work, the main parameters of the synthetic image generator have been maintained constant.
The magnification factor is equal to 64 pixels mm
− 1 and the particle pattern has a 2D Gaussian shape with a size (half height) varying in a range of 1 to 2.5 pixels between the centre and the border of the laser sheet (out-off focus effect). The laser sheet has a Gaussian profile and its thickness is 32 pixels at the
10
−
2 intensity level (level 1.0 at the centre of the slice). Three examples of synthetic images for different particle densities are shown in figure 3.
The way to create a couple of synthetic images of particles consists of moving each particle of the 3D particle field by
In the present work, the successive 3D particle fields used to create the synthetic images of particle are obtained from a 3D direct numerical simulation of multi-phase flow [8].
This simulation has been used in order to produce successive
3D particle fields with well-defined turbulence parameters
(intensity of turbulence, scale, spectrum
, . . .
).
The simulation resolves simultaneously the gaseous phase and the behaviour of a discrete phase (solid or liquid). The gaseous phase is computed by solving with a high order numerical scheme the Navier–Stokes equation up to the dissipative scales. A fully spectral scheme (with periodical boundary conditions) is used for the space derivatives and a third order Runge–Kutta scheme for the time step. The integration time step is dynamically computed from the velocity gradients and the characteristic time scale of the particle.
In the present work, it is always much smaller than 1
µ s.
Various initial conditions can be fixed in the simulation. In the present work, we have simulated flows with an isotropic and homogeneous turbulence. The simulated turbulent gaseous flow is then used to predict the dynamic behaviour of discrete particles (solid, liquid
, . . .
).
Before the first time step, discrete particles with a fixed density are randomly placed inside the computation domain.
During the computation, the motion of each particle is computed by resolving the simple transport equation d
V p d t
= C u
18
ρ l
µ d
2 f
(U − V p
) with
C u
=
1 +
Re
6
2
/
3 and
Re =
ρ l
U − V p
µ f d
(1) where d is the particle diameter,
U the gas velocity at the particle location,
V p the particle velocity,
ρ l the particle density and
µ f the fluid viscosity. In the present work, the size of the particle being equal to 1
µ m, only the drag force term has been assumed to be non-negligible in the particle transport equation [9].
The interaction between the two phases in the simulation uses a one-way computation, namely, the turbulent flow is not modified by the discrete particles.
Indeed, the local modification of the flow is expected to be negligible because the particle diameter is much smaller than the Kolmogoroff scale and the particle mass load is very low. In order to obtain the motion and the location of particles, at each time step, the previous transport equation is resolved for each individual particle.
The gas velocity
U at each particle location is computed by using a linear interpolation involving the three gas velocity components and their derivatives sampled at the eight closest mesh points. The derivatives take advantages of the high accuracy of the spectral scheme used to resolve the
Navier–Stokes equations.
3
B Lecordier et al
0.004
0.003
0.002
Figure 3. Synthetic images generated for different particle densities (625, 312 and 156 particles mm
−
3 ).
1e-06
1e-09
E(k)
1e-12
Gas
Order 0
Order 1
Order 2
Order 3
1e-15
0.001
1e-18
1000 10000 k (rad/m)
Figure 5. Spectrum of reconstructed vector map from 3D particle field for different interpolation orders.
0.001
0.002
x (m)
0.003
0.5 m/s
0.004
Figure 4. Particle velocity in a thin slice of 3D DNS of two phase flow.
1e-06
Figure 4 shows an example of velocities of particles included in a thin slice of the computation domain. Each vector corresponds to one individual particle [8]. The random location of particles used to produce synthetic images is not very appropriate to obtain turbulence information such as energy spectrum or length scales. So, in order to overcome this problem, we have developed an adapted interpolation procedure to turn irregular velocity samples into velocity vectors placed at regular space intervals [8]. This stage is very tricky because it can add a significant noise to the energy spectrum.
These interpolation problems are very similar to those encountered when experimental LDA samples or
PTV measurements are interpolated at regular intervals. In order to validate our interpolation scheme, direct numerical simulation with very small particles has been performed. In such conditions, the energy spectra for two phases are identical.
Figure 5 shows the energy spectrum of the gaseous phase (dark line) and those of the discrete phase obtained from a diffuse approximation scheme of four different orders [8]. For the less accurate interpolation procedure (order zero), a low cut-off frequency can be observed. The first and second interpolation order improve the cut-off frequency, but it is necessary to reach the third order to resolve the gaseous spectrum from the discrete phase [8]. The interpolation of the irregular velocity field of figure 4 is presented in figure 7.
1e-09
E(k)
1e-12
1e-15
Gas (
Gas (
∆ t=0
∆
µ s) t=50
µ s)
Gas (
∆ t=100
µ s)
Part. (
∆ t=0
µ s)
Part. (
∆ t=100
µ s)
1e-18
1000 10000 k (rad/m)
Figure 6. Effect on the energy spectrum of time average of two
DNS time steps.
The basic principle of PIV consists in measuring the local velocity from two successive views of the particle.
Nevertheless, if the time interval between images becomes too long compared to the characteristic time scales of flow, the
PIV technique can prevent the measurement of smallest scales of turbulence. In order to define the range of time interval which permits the measurement of the whole turbulence spectrum of our simulated flow, in figure 6 we have drawn the spectrum of gaseous and discrete phases of velocity field
V p
(x p
, t) computed from the DNS results of two time steps
( t − t/
2) and ( t
+ t/
2), and defined from the following
4
Direct numerical simulation to evaluate the accuracy of PIV treatments
Table 1. Parameters maintained constant for the direct numerical simulation u
(m s
−
1 u 2
) (m s
−
1
L int
) (mm)
Re
L
0.0
0.1
1 7
η τ
η 3 d
(
µ m) (
µ s) (m 2 s
−
3
ν
) (m 2 s
−
1 )
180 2200 3 14
.
7
×
10
−
6
Mesh Volume d size (mm 3 )
ρ l
(
µ m) (kg m
−
3
ρ gas
) (kg m
−
3 )
32 3 5 3 1 940 1.18
simple approximations: x p
(t, t) = 1
2
(x p
(t
+ t/
2
)
+ x p
(t − t/
2
))
V p
(x p
, t) = 1
2
(V p
(t
+ t/
2
)
+
V p
(t − t/
2
))
As is made clear in figure 6, for t shorter than 100
µ s, only a slight deviation from the ideal situation ( t =
0
µ s) of the energy spectrum can be observed for the two phases and no parasitic cut-off frequencies are introduced. Given the previous results, in the present work, the time interval between two DNS particle fields used to create synthetic images has always be maintained shorter than 100
µ s and 100 times larger than the time step of the simulation. It can be noticed that for further investigations, the average of DNS particle fields as previously described could be interesting to study the effect of the time interval t on the cut-off frequency of velocity measurement.
The parameters maintained constant for the simulation are summarized in table 1. Initially, 625 000 particles are randomly placed into the computation domain to reach a particle concentration of 5000 particles mm
−
3
, that is the particles take up 0
.
002% of the total volume. In order to produce a synthetic image of particles with lower particle concentration and the same flow property, only one out of n particles can be introduced into the synthetic image generator program, where n is an integer.
5.0
4.0
3.0
2.0
1.0
1.0
2.0
x (mm)
3.0
0,5 m/s
4.0
5.0
Figure 7. Reconstructed vector map from 3D particle field of DNS.
5.0
4.0
4. Results
3.0
4.1. Introduction
In the present paper, synthetic images of particles are used to compare two different PIV treatments: a usual crosscorrelation PIV method and a sub-pixel iterative PIV approach.
The usual cross-correlation PIV method is referred to as conventional PIV. It consists of cross-correlating small corresponding windows taken from two successive images of particles. In order to increase the dynamic of the velocity measurement, the particle displacements in fractions of a pixel are determined from a sub-pixel correlation peak interpolation.
In the present work, a 5
×
5 pixel 2D Gaussian peak interpolation method has been used [10].
The second PIV treatment is referred to as an iterative
sub-pixel PIV. The main idea of our new PIV method consists in an iterative measurement of particle displacement, which tends toward the measure of the most accurate detectable displacement, the zero displacement. The iterative shifting technique is started by a first estimation of the velocity field obtained from the conventional PIV method. Next, at each step, the interrogation windows are shifted in fractions of a pixel given by the previous local estimated velocity.
The iterative loop is stopped when the ‘maximum’ possible resolution of measurement is reached, that is, the measured displacement is (nearly) equal to zero [3, 7]. In addition, in
2.0
1.0
0.0
0.0
1.0
2.0
x (mm)
3.0
0,5 m/s
4.0
5.0
Figure 8. PIV velocity map from synthetic images of particles.
order to improve the measurement of velocity gradient, the interrogation windows are oriented to align the windows with the predicted direction of the particle displacement [3, 7]. The mains advantages of our treatment are the increasing of the dynamic range of velocity measurement and the reduction of
‘peak-locking phenomena’ [6, 11, 12].
In the present work, for the two PIV treatments, the velocity fields are computed with 50% overlap for an interrogation window of 32
×
32 pixels. For other interrogation window sizes, the same mesh was used because it was adapted at the space resolution of our direct numerical simulation.
5
B Lecordier et al
5.0
0.12
0.10
0.08
0.06
0.04
0.02
Conventional PIV
Iterative PIV
Simulation 4.0
3.0
2.0
1.0
Conventional PIV
Iterative PIV
Simulation
0.00
16x16 32x32 64x64
Window size
128x128
Figure 9. Measurement of velocity fluctuation for different sizes of interrogation window.
0.0
16x16 32x32 64x64
Window size
128x128
Figure 10. Measurement of 2D dissipation rate for different sizes of interrogation window.
4.2. Global structure and mean turbulence parameters of the flow
The first stage of this study has consisted in making a visual comparison of imposed velocity fields (DNS) to PIV vector maps. This simple comparison from more than 50 velocity fields reveals the capability of the two tested PIV treatments to resolve the large flow structures and to give, with accuracy, the global behaviour of flow. A comparison can be performed from the vector maps presented in figures 7 and 8 corresponding respectively to an imposed velocity field (DNS) and the associated vector map measured by using the conventional PIV technique. From these two vector maps, it is very difficult to point out any difference in the large flow structures.
The measurement of the mean velocity has confirmed the previous visual observations.
Indeed, for the two
PIV treatments, the mean velocities were always accurately measured for a large range of flow conditions.
The first significant difference between the imposed flow the velocity fluctuation (
√ u
2 ).
The velocity fluctuations measured from instantaneous vector maps are reported in figure 9 and compared to the imposed velocity fluctuations
(right bar). For the small interrogation windows (16
×
16), the conventional PIV approach overestimates the turbulence intensity ( u
). This phenomenon can be explained by the low number of particles involved in the computation of correlation, which leads to add significant high frequency noise.
In similar conditions the iterative sub-pixel technique gives a more accurate estimation of velocity fluctuation. When the interrogation window size becomes larger, the conventional
PIV treatment tends toward an underestimation of velocity fluctuation due to smoothing of velocity maps. For the iterative treatment, the underestimation is less pronounced and becomes significant for interrogation windows larger than 64
×
64 pixels (1
×
1 mm
2
). It is clear from these results that the measurement of velocity fluctuation is less sensitive to the interrogation window size for the iterative PIV technique than for the conventional PIV.
All the previous turbulent parameters have been measured from the raw data of vector maps ( u
, u
). From the same velocity fields, we have estimated the dissipation rate
2 d involving the computation of space derivative of vectors maps.
A few results of 2D dissipation rate are plotted in figure 10.
These results exhibit a high sensitivity of dissipation rate measurement to the size of interrogation window. For the conventional and iterative PIV techniques with 16
×
16 pixels interrogation window size, the measured dissipation rate is respectively four and two times larger than the imposed value.
This overestimation is due to the low number of particles in the correlation window, which introduces high frequency noise on the velocity measurement, and so biases the computation of the space derivatives. For the studied flow, it is necessary to use window size larger than 16
×
16 to measure the same order of magnitude as the imposed dissipation rate. In these conditions, the two PIV techniques give similar results for the measurement of dissipation rate and it seems that the derivative scheme plays an important role. The best estimation is for 32
×
32 pixels (0
.
5
×
0
.
5 mm
2
). When the window becomes larger, the smoothing of high velocity gradients tends to decrease the magnitude of dissipation rate and the influence of high frequency noise is less pronounced.
In order to improve the accuracy of the measurement of turbulence parameters involving space derivatives (dissipation rate, vorticity
, . . .
), further investigations have to be made.
Indeed, the accuracy of the measurement of space derivative involves many contradictory conditions.
The number of particles in the interrogation windows must be large enough to reduce parasite noise, but the size of the interrogation window has to be kept small to be able to resolve high velocity gradient.
To fulfil these two conditions, the accuracy of PIV treatment and a precise control of particle density are very important.
The second important point is the accuracy of the computation of the space derivative. In the present work, we have used a symmetrical derivative scheme of second order, which is quite sensitive to data noise. In future, to obtain more reliable results, it will be interesting from this simulation to evaluate the most adapted digital scheme to extract the space derivatives from
PIV vector maps.
4.3. Local error and velocity distribution
In the previous section, only a few mean turbulence properties have been studied without takes into account the local error of velocity vector. Nevertheless, even if the main turbulence
6
parameters are obtained from statistical analysis, the capability of the PIV technique to accurately measure each individual vector is still very important to resolved a wide range of turbulent scale.
Indeed, one of the main assumptions of the PIV technique is to assimilate the real curved trajectory of particles to the straight segment defined by two separate particle locations. This assumption is even better if the flight distance of particles between two flow exposures is maintained as small as possible. This remark leads to favouring a short value of t in order to reduce the low pass filtering effect of the PIV technique and then resolve the smallest scale of turbulence. Nevertheless, the use of very short time delay t can dramatically reduce the dynamic range of velocity measurement if the PIV algorithm is not sensitive and accurate to detect small particle displacement. Then, the accuracy of measuring each individual vector from a given PIV algorithm is very important because it can allow us to reduce the time delay and then improve the low-pass filtering effect of the PIV measurement. In addition, in numerous studies of turbulent flow the maximum acceptable time delay t depends on the 3D random behaviour of the flow.
Indeed, to reduce the undesirable effects (e.g. low correlation level) of loss of pairs due to the particle motion normal to the laser sheet, the flight distance of particles between two flow exposures must be smaller than the laser sheet thickness. In practice, the interrogation window size being very often larger than the laser sheet thickness, the range of particle displacement into the interrogation window is then limited to a few pixels.
Recent use of the PIV technique to study turbulent flow strengthens the previous remark.
Indeed, the stereoscopic
PIV studies have shown [13] a significant influence of the particle displacement perpendicular to the laser sheet on the accuracy of the in-plane velocity measurement. This effect can become non-detectable when the maximum in-plane particle displacement is lower than a few pixels and thus leads to using short times between two successive flow exposures. However, these working conditions mean that it is necessary to detect and accurately measure small particle displacements.
From our digital validation procedure, the accuracy of the PIV algorithm to measure small particle displacement in a turbulent flow is possible and can bring important information to compare different PIV algorithms.
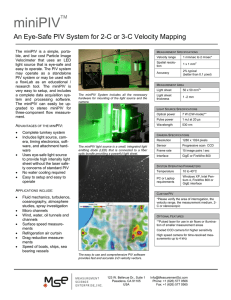
In order to illustrate this particular point, two instantaneous contour plots for the conventional (left) and iterative (right) PIV algorithm are plotted in figure 11. The level of the contour plot is proportional to the absolute deviation of the u component of PIV measurement from the imposed value, namely proportional to
| u
P IV
− u
DNS
|
. For the conventional PIV, the contour plot exhibits significant spatial variations on the whole of the velocity field. For the iterative sub-pixel PIV algorithm, the local error is lower. The spatial distribution is also more uniform and then indicates that the accuracy of this algorithm is less dependent than the conventional algorithm on the magnitude of velocity vector.
For this example, the mean error of the conventional PIV is three times larger than the mean error of the iterative PIV. This is around the same for the StDev of local error.
In addition, from the contour plot of the conventional PIV, we can observe a predominance of vertical strips corresponding to large error value.
Similar behaviour can observed for
Direct numerical simulation to evaluate the accuracy of PIV treatments the v component but in this case the strip orientations are horizontal.
This effect is attributed to the ‘peak-locking’ bias described by several authors [3, 6, 11, 12] as a biasing of the measured displacement towards the integer values of the displacement. This is a systematic error with a period of 1 pixel and the maximum uncertainties on the velocity measurement are introduced for the particle displacement with fractional part close to 0.5 pixel.
In order to illustrate the influence of ‘peak-locking’ on the velocity measurements, we have drawn in figure 12 the distributions of u and v components obtained from 50 couples of synthetic images of particles.
In this figure, the solid line corresponds to the imposed velocity distribution from the simulation. For this example, the velocity range is included between
−
6 and 6 pixels and the mean velocity is close to zero.
For the conventional PIV (at the top), the ‘peaklocking’ problem has a significant influence on the distribution shape.
The probability of velocity vector with a discrete displacement is overestimated to the detriment of velocity with a displacement in fractions of 0.5 pixels. This effect is undetectable for the sub-pixel iterative algorithm (bottom plots) and the shapes of velocity distributions are well determined. Similar results from experimental measurements of a turbulent flow have been observed in [3].
A discussion of the peak-locking phenomena is beyond the scope of the present paper and this problem is still a subject of controversy, but it is very interesting to notice that our digital PIV validation procedure is able to retranscribe the peak-locking phenomena, and so it will be useful to study which image parameters (particle pattern diameter, particle density
, . . .
) have a significant effect on the peak-locking bias.
For the measurement of turbulent flow by PIV, the previous results have important consequences. For the conventional
PIV, to reduce the effect of the ‘peak-locking’ bias on statistical turbulence parameters, it is necessary to have long time delay between pulses to keep a wide dynamic range of particle displacement (e.g. one-quarter of the interrogation window size). Nevertheless, from a highly accurate PIV algorithm such as the iterative sub-pixel approach, it is possible to reduce the time delay t between frames without increasing the uncertainties on the velocity measurements. These working conditions must lead to the reduction of the low pass filtering effect of the PIV technique and then increase the range of turbulent scale accessible by PIV. From our approach based on DNS of multi-phase flow this particular aspect can be accurately studied because the trajectory of each particle of the simulation is resolved and is independent of the time delay between images.
4.4. Velocity correlation and energy spectrum
A turbulent flow is characterized by a wide range of time and length scales. An accurate measurement of characteristic length scales is then of prime importance.
From PIV measurements, it is difficult to conceive a direct measurement of the smallest scales of turbulence and only a rough estimation from parameters such as , u can be used. If the measurement of a large scale of turbulence seems possible from PIV vector maps, the smallest accessible scales are not well defined.
In order to estimate the range of scales accessible to the
7
B Lecordier et al
A.U
4.3
3.6
2.9
2.1
1.4
0.7
0.0
10.0
9.3
8.6
7.9
7.1
6.4
5.7
5.0
Figure 11. Example of local error of u component for the conventional (left) and iterative (right) PIV algorithms.
u (m/s)
0.0
0.1
0.2
0.3
v (m/s)
0.0
0.1
0.2
-0.2
-0.1
Conventional PIV
-0.2
-0.1
Conventional PIV
0.3
Simulation
0.2
Simulation
0.2
A.U
5.0
4.3
3.6
2.9
2.1
1.4
0.7
0.0
10.0
9.3
8.6
7.9
7.1
6.4
5.7
0.1
0.1
0.0
-4.0
-2.0
-0.2
Iterative PIV
-0.1
0.0
u (pixel) u (m/s)
0.0
2.0
0.1
0.2
4.0
0.3
0.0
-4.0
-2.0
-0.2
Iterative PIV
-0.1
0.0
v (pixel) v (m/s)
0.0
2.0
0.1
0.2
4.0
0.3
Simulation Simulation
0.2
0.2
0.1
0.1
0.0
-4.0
-2.0
0.0
u (pixel)
2.0
4.0
0.0
-4.0
-2.0
0.0
v (pixel)
2.0
Figure 12. Comparison of velocity distribution for conventional and iterative PIV method.
4.0
PIV technique, the space correlation of velocity and the measurement of the energy spectrum have been studied.
Figure 13 presents an example of measurement of transverse velocity correlation. For correlation windows larger than 16
×
16 pixels, the characteristic shape of the transverse correlation signal is well resolved even if the signal does not tend toward zero for large value of x due to the limited size of correlation domain. From such results, a large characteristic length scale can be extracted. For an interrogation window of
16
×
16 pixels the measurement of the length scale is more tricky. Indeed, for the x value close to zero, we can observe a steep fall of correlation signal due to the low correlation of noise. This effect is larger for the conventional PIV treatment than for the iterative PIV treatment, but it slightly persists even for the iterative PIV treatment. For small interrogation window, it seems difficult to accurately measure the length
8
Direct numerical simulation to evaluate the accuracy of PIV treatments
1.0
10
-9
0.5
Simulation
16x16 (Iter. PIV)
32x32 (Iter. PIV)
64x64 (Iter. PIV)
128x128 (Iter. PIV)
16x16 (Conv. PIV)
10
-12
0.0
10
-15
Simulation
16x16
32x32
64x64
128x128
-0.5
0.0
0.5
1.0
∆ x (mm)
1.5
2.0
2.5
Figure 13. Transverse velocity correlation for different sizes of interrogation window.
10
-18
100 1000 k (rad/m)
10000
Figure 15. Energy spectrum from iterative PIV results.
10
-9
10
-12
10
-15
Simulation
16x16
32x32
64x64
128x128 window does not seem to have a strong influence on the cutoff frequency. Indeed, when the interrogation decreases, the energy of the high frequencies increases due to the noise introduced by the PIV treatments. Thus, it seems that the reduction of size of the interrogation window for a given image of particles is not always a guarantee of improvements for the measurement of small scales of turbulence.
5. Conclusions
10
-18
100 1000 k (rad/m)
10000
Figure 14. Energy spectrum from conventional PIV results.
scales from a correlation signal without applying a spatial filtering of raw velocity before the correlation calculation. The study of such filtering could be realized from this fully digital approach.
The ‘ultimate’ turbulence information to measure is the energy spectrum. Indeed, the energy spectrum provides much information about the accuracy of the PIV technique and it gives a direct view of the scale range accessible to the PIV method.
Figures 14 and 15 show the energy spectra obtained respectively from the conventional PIV technique and the iterative sub-pixel method. These results show that the two
PIV techniques are well adapted to resolve the large scale of turbulence (low frequency). Nevertheless, the iterative subpixel is more accurate to measure low frequency whatever the size of interrogation window.
These results are in good agreement with those presented in figure 9.
For large correlation window (128
×
128) we can observe an underestimation of the energy spectrum, which indicates a loss of energy due to a smoothing of the large scale of turbulence. On the other hand, for the small scale, the cutoff frequencies are very similar for the two PIV treatments and an accurate measurement of the value of cut-off frequency would be necessary to study possible improvement of iterative
PIV treatment.
In addition, the size of the interrogation
In the present paper, a complete procedure to objectively compare the capability of different PIV algorithms to measure the properties of turbulent flows has been described.
Our approach is based on synthetic images with imposed velocity fields. The synthetic images are created from 3D particle fields generated from the direct numerical simulation of two phase flow.
This paper gives a short description of the multi-phase direct numerical simulation and explains how to use 3D particle fields to produce synthetic images of particles and the different parameters of the synthetic image generator.
In the present work, the simulation is used to produce
3D turbulent flow fields with homogeneous and isotropic properties. The discrete phase (particle) is transported by the gas phase and this simulation allows us to resolve the trajectory of each individual particle.
The turbulence properties of the flow field imposed on synthetic images are computed from the particles extracted from the 3D particle fields and involved in the creation of images.
To make easier the computation of turbulence properties (e.g. spectrum, scale
, . . .
) from the particles of the simulation, we have developed an adapted interpolation scheme to turn an irregular velocity field
(particle field) into a regular velocity field.
The accuracy of different interpolation schemes has been investigated by spectrum analysis and a third order diffuse approximation scheme has been retained. The maximum time delay between two simulated particle fields to create synthetic images of particles has also been studied in order to impose a turbulent velocity field without introducing a cut-off frequency.
The potentialities of our digital approach to validate and compare PIV algorithms for measurements of turbulent flows have been illustrated by the comparison of two different
9
B Lecordier et al
PIV treatments, the conventional PIV method and a subpixel iterative technique [3, 7]. The measurement accuracy of a few statistical turbulence parameters (fluctuations, dissipation, correlation
, . . .
) from the two PIV treatments have been performed for different sizes of interrogation window.
Examples of more detailed comparisons of local velocity measurement error have been presented and they have shown that the velocity error of the sub-pixel iterative technique is lower than the conventional PIV algorithm and less dependent on the velocity magnitude. From these preliminary results, it seems that the sub-pixel iterative technique is more appropriate to measure the turbulence properties and it produces less measurement noise than conventional PIV. In addition, the capability of our iterative sub-pixel PIV algorithm to detect small particle displacement allows us to measure a turbulent velocity field from a smaller range of particle displacement than the conventional PIV. That permits us to use a short time delay between images and then leads to improvement of the low-pass filtering of PIV technique and reduction of the undesirable effects of 3D particle motion.
These first results have shown the capability of our digital approach to perform an objective comparison of different
PIV treatments. Velocity bias observed from experimental
PIV studies of turbulent flow (peak-locking, velocity gradient, cut-off frequency
, . . .
) have been simulated from our digital validation procedure of the PIV algorithm. Such approaches can then be used to investigate, identify and dissociate the relevant parameters (particle diameter, size of particle pattern, particle concentration, velocity gradient, thickness of laser sheet, influence of time separation
, . . .
) involved in phenomena such as cut-off frequency, velocity measurement error or other important limitations for turbulence measurement. The dissociated variation of these different parameters would permit us to define characteristic numbers useful for real experiments.
A second aspect of our validation procedure is the possibility to define the appropriate post-processing of the PIV vector map. For instance, it could be interesting to study which derivative scheme is the most accurate to measure dissipation rate and vorticity from PIV vector maps.
These different analyses for various turbulent flows
(isotropic, boundary layers
, . . .
) will be useful to find the
‘best’ experimental settings for a given flow (laser sheet, particle density
, . . .
) in order to obtain reliable measurements of turbulence properties.
References
[1] Huang H T, Fielder H E and Wang J J 1993 Limitation and improvement of PIV: part I Exp. Fluids 15 168–74
[2] Westerweel J 1999 Theoretical analysis of the measurement precision and reliability in PIV Proc. 3rd Int. Workshop on
PIV (Santa Barbara, 1999)
[3] Lecordier B, Lecordier J C and Trinit´e M 1999 Iterative sub-pixel algorithm for the cross-correlation PIV measurements Proc. 3rd Int. Workshop on PIV (Santa
Barbara, 1999)
[4] Okamoto K, Ishio S, Kobayashi T and Saga T 1998 Particle imaging velocimetry standard images for transient three-dimensional flow Proc. 9th Int. Symp. on Application of Laser Techniques to Fluid Mechanics (Lisbon, 1998)
[5] Raffel M, Willert C and Kompenhans J 1998 Particle Image
Velocimetry—a Practical Guide (Berlin: Springer)
[6] Nogueira J, Lecuona A and Rodriguez P A 2001 Identification of a new source of peak-locking, analysis and its removal in conventional and super-resolution PIV techniques Exp.
Fluids 30 309–16
[7] Lecordier B 1997 Etude de l’int´eraction de la propagation d’une flamme pr´em´elang´ee avec le champ a´erodynamique, par association de la tomographie laser et de la v´elocim´etrie par images de particules PhD Thesis University of Rouen
[8] Vervisch L M J 1999 D´eveloppement d’outils num´eriques d´edi´es `a l’´etude de la combustion turbulent PhD Thesis
University of Rouen
[9] Maxey M R and Riley J J 1983 Equation of motion for a small rigid sphere in a non-uniform mixture Phys. Fluids 26
883–9
[10] Lourenco L and Krothapalli A 1995 On the accuracy of velocity and vorticity measurements with PIV Exp. Fluids
18 421–8
[11] Westerweel J 1998 Effect of sensor geometry on the performance of PIV interrogation Proc. 9th Int. Symp. on
Application of Laser Techniques to Fluid Mechanics
(Lisbon, 1998)
[12] Scarano F and Riethmuller M L 1999 Iterative multi-grid approach in PIV image processing with discrete window offset Exp. Fluids 26 513–23
[13] Lecerf A, Renou B, Allano D, Boukhalfa A and Trinit´e M
1999 Stereoscopic PIV: validation and application to an isotropic turbulent flow Exp. Fluids 26 107–15
10