Dynamic PIV : a Strong Tool to Resolve the Unsteady Phenomena. Abstract
advertisement

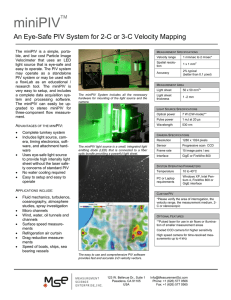
Dynamic PIV : a Strong Tool to Resolve the Unsteady Phenomena. K. Okamoto The University of Tokyo, Tokai-mura, Ibaraki, 319-1188, JAPAN okamoto@tokai.t.u-tokyo.ac.jp Abstract This paper describes the application and future of the Dynamic PIV method. It consists of a high-speed camera with high-resolution, a high-speed pulse laser and a synchronization system. The equipments are almost the same as for a conventional PIV system. However, it needs advanced software for the analysis of the dynamic system. The current status of the Dynamic PIV is discussed. The future is also shown through the application of Dynamic PIV. 1 Introduction The two-dimensional PIV (2D2C) and stereo PIV (2D3C) system had already been commercialized. In these standard PIV, high-resolution CCD camera and Double pulse Nd:YAG laser are used. The image resolution is at least 1000 x 1000 pixel. Sometimes, 2000x2000 pixel CCD can be used. Because of the limits of the camera's read-out time and laser reputation frequency, these PIV systems can measure the flow field at about 4 to 15 Hz. To improve the spatial resolution, many high-resolution PIV algorithms have been proposed, including recursive PIV, gradient PIV and so on. The interrogation area is now currently 16x16 and sometimes down to 4x4 pixel, resulting in 100,000 vectors in one image. Although the spatial resolution has been improved significantly, the temporal resolution remains about 15 Hz. Therefore, using current PIV system, only a statistical analysis can usually be carried out. Very little transient information is used. If the characteristics frequency of the target flow field is much lower than 15 Hz, e.g., 1Hz, the measured data can be directly applied for transient analysis. However, it is a very limited field. The other choice is the phase average analysis. When the phenomenon has certain periodicity, phase averaged vector fields can be measured with varying the measurement timing. Recently, because of the rapid progress of the high-speed digital camera, much higher framing rates can be reached. Also, using a high-frequency pulsed laser as 18 an illumination, enough light (10 mJ) can be supplied to the target flow field of tipically 10 cm square. In this paper, the current status of the Dynamic PIV system will be reviewed. Then, the advantage of the Dynamic PIV will be discussed. Advanced PIV algorithms for Dynamic PIV will be proposed. The post processing technique for the Dynamic PIV will be discussed. 2 Dynamic PIV System (a) Camera "Dynamic PIV" means high temporal resolution, that is a PIV system for analyzing the dynamical information in the flow field. Etoh et al., (2002) developed a 1,000,000 fps high-speed CCD camera with a 312x260 image resolutions, which allows to resolves at most a 500KHz dynamics. On the side of CMOS camera, several high speed camera had been commercialized. For example, the Photron FASTCAM Max120 (APX) can capture 1024x1024 pixel images at 2000fps. The image resolution is thus equivalent to the current conventional PIV cameras, with a temporal resolution 70 times faster. Also, the camera can capture 2048 images sequentially, corresponding to about 1 s of the phenomenon. The quantization is done on 10 bits (1024) per pixel. The sensitivity is thus better than a conventional 8 bits CCD cameras. Up to now, high-speed cameras used to sacrify the image resolution and number of images recorded in order to achieve the high frame rate. Now, CMOS cameras have enough resolution and store enough images for a useful PIV analysis. This is their main advantage. Morover, these CMOS cameras can reduce the framing rate to that of conventional PIV cameras. Therefore, they can be used also for conventional PIV applications. The author believes that the CMOS cameras will rapidly become the standard cameras for PIV. (b) Pulse laser In addition to the high-speed camera, the illumination tool is a key device. In a conventional PIV system, the double pulse Nd:YAG laser is widely used. The pulse energy is from 20 to 400 mJ. The interval between the pulses can be controllable to a nano second. However, the repetition rate is limited to be about 30 Hz. The high power pulsed lasers developed for welding can be used for the highspeed illumination. The Coherent Corona is a Nd:YAG laser (λ = 532 nm), with a repetition rate up to 25 kHz. The Peak power is 75 W, i.e. 7.5 mJ/pulse at 10 kHz. The peak pulse energy is 14 mJ/pulse at 2 kHz. Combining the 2 kHz CMOS camera with the Corona pulse laser, good quality particle images can be captured every 0.5 ms (2kHz). For some water experiments, e.g., laboratory scale water jet, 0.5 ms time interval is short enough to extract the velocity distributions. When the characteristics frequency of the jet (e.g., Invited Lectures 19 St = 0.2) is less than 1kHz, the unsteady flow information can be obtained with a 2 kHz sampling rate. Then high spatial-resolution and high temporal-resolution velocity vector can be measured using these cameras and lasers. In section 4, an example of such an experiment will be described and discussed. (c) Frame straddling For experiments in air, an 0.5 ms time interval is usually not short enough. Then, the frame straddling technique is also needed. To achieve the frame straddling illumination, twin cavity or double pulse single cavitylasers are needed. In the twin system, two pulsed laser beams will be combined into one beam (similar to the conventional PIV system). The advantages of the twin system are (1) the controllability of the time interval between the two pulses and (2) similarity of the laser intensity. With synchronizing the twin lasers and camera, any time interval can be generated. The time interval is limited by the high-speed camera dead time. Since it is about 4 µs for this camera, the minimum time interval will be 4 µs. The disadvantage of the twin system is the difficulty of the beam alignment. On the other hand, double pulse single cavity lasers had been commercialized in 2002. In this study, the Positive Light, Evolution-30 with double pulse option is used. The laser rod is made of Nd:YLF (λ = 527nm). In this system, single pulse is divided into double pulses, with controlling the Q-switch. The interval between the double pulses can be varied from 1 to 100 µs. The repetition rate is 1 to 10kHz. The pulse energy is 10mJ/pulse at 1kHz in the double pulse mode. Since the beam is generated by one rod, no beam alignment is needed. However, the beam characteristics (e.g., pulse duration) of 1st pulse is slightly different from that of the 2nd pulse. So, the user should take care the beam differences for the frame straddling illumination. Synchronizing the double pulse system (1kHz / double pulse mode) with the high-speed camera (2kHz), the velocity field can be sampled at 1kHz. The time interval between the double pulses is also limited by the camera dead time (4 µs). 3 Advanced PIV algorithms for Dynamic PIV (1) PIV Algorithms For the conventional PIV system, many PIV algorithms had been proposed using the double images. Recursive PIV considering the image distortion is the popular technique for the PIV now (e.g., Hart, 2000). In these techniques, the spatial resolution is improved dramatically, down to 8x8 pixel and in favourable situations to 4x4 pixel. Let us consider the PIV algorithm to be a low-pass filtering of the images. The image has 8x8 pixel information, which will be converted into one velocity vector. The velocity is the averaged displacement of the 8x8 pixel interrogation area. This 20 means that the obtained velocity is considered to be the low-pass filtered information of 8x8 images. This procedure is the spatial low-pass filtering. In the Dynamic PIV, high temporal resolution images are captured. Therefore, the temporal information can be used to get the velocity vectors. For example, three or four temporal images can be used to calculate one velocity vector. A temporal averaging can be taken into account in advanced Dynamic PIV algorithm. This procedure is then a spatial-temporal low-pass filtering. Many spatial-temporal low-pass filtering algorithms can be considered. In this paper, three types will be shown. (2) Higher-order gradient method Nishio and Okamoto (2003) have proposed advanced algorithms based on the gradient method (Sugii et al, 2001). In the usual gradient method, the following constraint equation is solved in a small interrogation area, ∂f ∂f ∂f (1) +u +v =0 ∂t ∂x ∂y where f is the image grey level. In a higher-order method, this equation becomes : ∂f 1 ∂f ∂u ∂u ∂u ∂f ∂f + u + u + v ∆t + + v ∆t 2 2 ∂ ∂ ∂ ∂y ∂ ∂ ∂ t x y x t x 1 ∂f ∂v 1 ∂2 f ∂2 f ∂2 f ∂v ∂v + u + v ∆t 2 + 2 + u 2 2 + v 2 2 ∆t 2 + 2 ∂y ∂t 2 ∂t ∂x ∂y ∂x ∂y ∂2 f ∂2 f ∂2 f 2 ∆t = 0 + u + uv +v ∂x∂y ∂y∂t ∂x∂t (2) Using several sequential images, the velocity term, , and the higher order terms, can be directly calculated. (3) Hybrid PIV/PTV Hong (2003) proposed an hybrid technique of PIV and PTV. In the four-time step PTV (Nishino et al., 1989), the particle movement was tracked for four time steps. In Hong's technique, initially, the cross-correlation functions are calculated for every sequential image : C t ( p, q ) = ∑ f t (i, j ) f t +1 (i + p, j + q ) (3) where superscript t means the temporal index and f is the image grey level. In the correlation function, Ct, several peak locations are searched. Then, the peak location of the correlation functions is tracked for several sequential functions. The same algorithms for the particle tracking techniques can be applied. The particle location is replaced to the correlation peak location. Usually, there are several Invited Lectures 21 peak locations in one correlation function. The correct peak is tracked among several peaks through the temporal sequential correlation functions. This procedure is the same with four-time step tracking (e.g., Nishino et al., 1989). The peak locations are calculated with sub-pixel accuracy. (4) Lagrangian PIV Okamoto and Sugii (2003) have proposed a higher order cross-correlation. In the above techniques, the cross-correlation function or gradient functions are calculated at the same interrogation area. These procedures are considered to be the Eular expressions. Here, the correlation function for a sequence of three images is defined as follows : C t ( p, q ) = ∑ f t −1 (i − p, j − q ) f t (i, j ) + ∑ f t (i, j ) f t +1 (i + p, j + q ) (4) This correlation function is a Lagrangian expression. Also, the location of the measured vector is the center of interrogation area at time t. Figure 1 shows the example of the improvement of accuracy using the present technique using the Standard Image #301 (Okamoto et al., 2001). The interrogation area is 4x4. Although there are so many peaks in the normal correlation field, there will be only one peak for the present correlation field. Even when the interrogation area is only 4x4 pixel, the Lagrangian cross-correlation gives a single peak in the correlation field. Because the information of the correlation function increases, the accuracy also improves. The peak location also moves a little because of the temporal variation of the vector. In the present case, the two correlations are added as shown in Eq (4). The multiplication of the correlation can also be applicable, which may be similar to Hart's algorithm (2000). There will be many algorithms based on the similar concept, i.e., the temporalspatial low-pass filtering. With increasing the temporal directional averaging, spatial resolutions can be improved to be 1 pixel. (This is the original gradient technique (optical flow) proposed in 1980s). For the recursive procedure, not only the spatial direction, but also the temporal direction can be taken into account to increase the resolution. (a) (b) Fig. 1. Improvement of correlation peak detection using Lagrange PIV. (a) Single pair correlation. (b) Double pair correlation (Eq.(4)). 22 Y/D 1 0 -1 0 1 2 3 4 5 X/D 6 7 (a) Fig. 3. Average velocity distributions Fig. 2. Schematic of water jet experiment 100 Y/D=0.35, X/D=3 Suu Svv 10 Spectral Density 0.0170281 1 0.119245 Y/D 0.204425 0 0.221462 0.170353 0.247016 1 0.1 -1 0 1 2 3 4 X/D 5 6 7 (b) 0.01 1 10 100 1000 Frequency (Hz) 2 Fig. 4. Fluctuating term( u ' ) Fig. 5. Spectrum of fluctuation 4 Application of Dynamic PIV 4.1 Water jet Using the Dynamic PIV system, a water jet experiment was examined. Figure 2 shows the experimental set-up. The round jet is injected into a large open bath (1200x600mm and 300 mm in depth). The jet nozzle is settled horizontally at the center of the bath. The nozzle inner diameter, D, is 14 mm. The average velocity of the jet is 650 mm/s, giving a Reynolds number Re = 9100. The viewing area is from 0 to 6.6D downstream of the nozzle. The characteristics frequency of the jet is estimated to be 20Hz, based on the Strouhal number St = fD/U = 0.2. Therefore, recording 1000 velocity maps per second allows to fully resolve the phenomenon in time.. The diameter of tracer particle is 30 µm. The image resolution is 1024x512 pixel at 1000 fps. A single pulse laser (Corona) is used for the illumination, synchronized with the camera Invited Lectures 23 allowing to capture one image every millisecond. The number of images captured in one set is 2048, corresponding to. about 2 seconds of the phenomenon. Considering the characteristics frequency, 20Hz, this total sampling timeis long enough to capture the statistical flow field. By analyzing the sequential images, velocity maps are obtained every 1ms. The experiment had been repeated 4 times, resulting in 8 seconds of data. The averaged velocity vector field is shown in Fig. 3. Figure 4 shows the dis2 tributions, u ' . The spectrum of the fluctuation in the shear layer (x/D = 3, y/D=0.35) is shown in Fig. 5. The dominant frequency is confirmed to be about 15Hz. The 1000Hz sampling frequency and 2s sampling time are sufficient to analyze the data. The temporal variation of the velocity will be analyzed in Section 5. 4.2 Mist jet into air (Hayami et al., 2003) The above water jet experiment shows relatively slow transient. To investigate the capability of extracting the fast transient, an air jet with mist is visualized. A moisturizer is used for the mist jet generation. A double nozzle system with 120 degree angle generates tan air jet with small droplet. The upstream tank pressure is set to be 0.2MPa, in gauge pressure. The light sheet is set horizontal and an area of 100mm downstream of nozzle is visualized using a double pulse laser system (Evolution-30). (a) (b) Fig. 6. Mist velocity distributions with 1kHz sampling (1024x1024 pixel). (a) Example of captured image. (b) Measured Velocity field. In case 1, the camera framing rate is 2,000 fps, with 1024x1024 pixels. The time interval between the double pulses is 0.1 ms , using theframe straddling technique. An example of captured image and measured velocity field are shown in Fig. 6. High-resolution vector maps are captured at 1 kHz. In case 2, the camera framing rate is 10,000 fps, with a 512x256 pixels resolution. In this case, the single pulse mode is used for the laser illumination, so that the time interval between the images is 0.1ms. An example of captured image is 24 shown in Fig. 7. The mean velocity map for a total of 16,000 images is shown in Fig. 8. Figure 9(a) shows the temporal variation of the velocity. The vortex motions can be observed in these figures. To emphasize the flow characteristics, the fluctuating part of the velocity , i.e. u ' = u − U ., is shown in Fig 9b. In the fluctuation vector map, the vortex is clearly evidenced. Following the sequential vector map, the vortex transport is also easily recognized. Fig. 7. Mist image with 10 kHz (512x256) (a) Fig. 8 Averaged Velocity vectors (b) Fig. 9. Temporal fluctuation of the mist flow (10kHz, 512x256). Instantaneous velocity. (b) Fluctuation term (u'). Invited Lectures 25 5 Post-processing of the Dynamic PIV vectors In the 2D PIV analysis, POD(Proper Orthogonal Decomposition) technique is widely used. However, in these techniques, the temporal domain information is not taken into account. Since there is enough information in the temporal direction for Dynamic PIV, the three-dimensional (2D in space, 1D in time) POD analysis can be carried out, showing the 3D dominant modes of the phenomenon. The details of the 3D-POD analysis for Dynamic PIV are discussed by Bi et al. (2003). The 3D-POD analysis may also be considered as a low-pass filtering in 3D. Fig. 10 shows the comparison of the spectrum between the measured data and reconstructed POD data, (sum of first 6 modes). The original data is measured in the water jet experiment described in Section 4.1. It shows that most of the energy is contained in the first 6 modes in the present case. Fig. 10. 3D-POD reconstructed spectrum 1 m/s 1.1 1 m/s 1.1 1 1 0.9 0.9 0.8 0.8 0.7 0.6 Y/D Y/D 0.7 0.5 0.4 0.5 0.3 0.2 0.2 0.1 0 0.6 0.4 0.3 0.1 2 3 4 X/D 5 (a) 0 2 3 4 X/D 5 (b) (a) (b) Fig. 11. Comparison between the measured and reconstructed vector. (a) Measured vector. (b) Reconstructed vector (Sum of first 6 modes). Fig. 11 shows the instantaneous velocity distribution and the reconstructed one. The basic component of the flow structure is correctly reconstructed. The noise and error are considered to belong to the higher order mode, they can be removed by the POD analysis. It is considered to b e the low-pass filtering in 3D frequency domain (2D spatial + 1D temporal). Since the dominant first 6 modes are 3D, it is 26 very difficult to show them in 2D on paper. They are displayed as a movie file at the following URL (http://www.utnl.jp/~okamoto/3dpod/). 6 Conclusion As was illustrated in the present contribution, Dynamic PIV can provide a new insight in the unsteady aspects of flow fields. By providing a large amount of good quality data, it can resolve quantitatively the dynamics of the flow field. Dynamic PIV will surely be soon a standard tool for transient flow analysis. Based on the present experience, for further evaluation on the dynamics of the flow field, the following procedure should be investigated. 1) To obtain highly-reliable velocity data, the low-pass filtering technique in both the spatial and temporal domains should be standardized, including the PIV evaluation algorithm. 2) To analyze the spatio-temporal information, the three-dimensional POD technique works well as a post processing tool, allowing to retaine the most energetic modes and to remove most of the PIV noise. 3) Advanced techniques for comparison between the measured results and computer simulations will be needed. Both spatial and temporal frequency analysis will also benecessary. The wavelet analysis and advanced POD analysis should be applicable. Acknowledgement A part of this work is carried out under the support of JSPS Grant-in-aid for scientific research A (No.14205031, Prof. Hayami, Kyushu University). The author would like to express special thanks to Prof. H. Hayami and Mr. S. Aramaki, Kyushu University, and Dr. Y. Sugii and Dr. W.T. Bi, The University of Tokyo. References Bi, W.T., Sugii, Y., Okamoto, K. and Madarame, H., Proper orthogonal decomposition of round jet turbulence measured by Dynamic PIV, ASME FEDSM (2003), 45217. Etoh, G.T., Takehara, K. and Takano, Y., J. Visualization, 5, (2002) 213. Hayami, H., Okamoto, K., Aramaki, S., Kobayashi, T., Proc. 7ASV, (2003) Hart, D.P., Super-resolution PIV by Recursive Local-correlation, J. Visualization, 3, (2000) 187. Hong, S.D., Ph.D thesis, Univ. Tokyo, (2003) Nishino, K., Kasagi, N. and Hirata, M., Three-dimensional particle tracking velocimetry based on automated digital image processing, Trans. ASME, J. Fluid Eng., 111, (1989), 384. Invited Lectures 27 Nishio S. and Okamoto, K. "Mathematical study on the algorithm for higher-order PIV measurement," Report of JPIV, (2003) Okamoto, K., Nishio, S., Kobayashi, T., Saga, T. and Takehara, K., Evaluation of the 3D-PIV Standard Images (PIV-STD Project), J. Visualization, 3, (2000) 115 Okamoto, K. and Sugii, Y, Report of JPIV (2003) Sugii, Y., Nishio, S., Okuno, T. and Okamoto, K., A highly accurate iterative PIV technique using a gradient method, Measurement Science Technology, 11, (2000) 1666.