Kinetic analysis of arm reaching movements during voluntary
advertisement

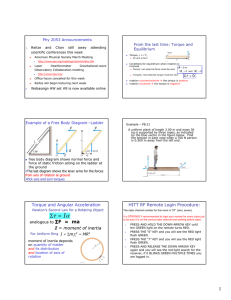
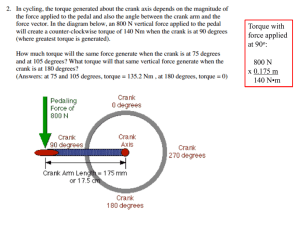
Exp Brain Res (2008) 187:509–523 DOI 10.1007/s00221-008-1321-0 R ES EA R C H A R TI CLE Kinetic analysis of arm reaching movements during voluntary and passive rotation of the torso Simone B. Bortolami · Pascale Pigeon · Paul DiZio · James R. Lackner Received: 9 January 2007 / Accepted: 11 February 2008 / Published online: 11 March 2008 © Springer-Verlag 2008 Abstract Reaching movements made to targets during exposure to passive constant velocity rotation show signiWcant endpoint errors. By contrast, reaching movements made during voluntary rotation of the torso are accurate. In both cases, as a consequence of the simultaneous motion of the arm and the torso, Coriolis forces are generated on the arm tending to deXect its path. Our goal in the present paper was to determine whether during voluntary torso rotations arm movement accuracy is preserved by feed forward compensations for self-generated Coriolis forces. To test this hypothesis we analyzed and quantiWed the contribution of torso rotation and translation to arm dynamics and compared the kinematics and kinetics of pointing movements during voluntary and passive torso rotation. Coriolis torques at the shoulder increase nearly sixfold in voluntary turn and reach movements relative to reaches made without torso rotation, yet are equally accurate. Coriolis torques during voluntary turn and reach movements are more than double those produced by reaching movements during passive body rotation at 60°/s. Nevertheless, the endpoints of the reaches made during voluntary rotation are not deviated, but those of reaches made during passive rotation are deviated in the direction of the Coriolis forces generated during the movements. We conclude that there is anticipatory pre-programmed compensation for self-generated S. B. Bortolami · P. Pigeon · P. DiZio · J. R. Lackner Ashton Graybiel Spatial Orientation Laboratory, Brandeis University, Waltham, MA, USA S. B. Bortolami (&) The Charles Stark Draper Laboratory, Inc., 555 Technology Square, Cambridge, MA 02139-3563, USA e-mail: simborto@brandeis.edu Coriolis forces during voluntary torso rotation contingent on intended torso motion and arm trajectory. Keywords Arm model · Arm reaching · Inverse dynamics · Coriolis perturbation · Voluntary movement · Passive movement Introduction When a reaching movement is made while the torso is simultaneously turning, an inertial Coriolis force is generated on the reaching arm (see Fig. 1). The elementary Coriolis force (dFcor) on a particle is proportional to its mass (dm), its velocity (v) relative to the rotating environment, and the rotation velocity () of the environment, and acts orthogonally to the particle velocity direction: dFcor = ¡2dm( £ v). The total Coriolis force on the arm is given by the integration of the elementary forces dFcor over the volume of the moving segments. Coriolis forces can arise during passive or active rotation. If a reaching movement to a target is made during passive, constant velocity rotation in a fully enclosed slow rotation room, its trajectory and endpoint will be signiWcantly deviated in the direction of the Coriolis force generated on the arm (Lackner and DiZio 1992, 1994). If the individual makes additional reaches to the target, even without visual feedback of hand motion, subsequent reaches will become straighter and more accurate until they are indistinguishable from prerotation reaches. When a reach is then made with the room again stationary, a mirror image aftereVect will be apparent reXecting an anticipatory compensation for a Coriolis force that is no longer present during the reaching movement. It is fairly well accepted that adaptation to Coriolis forces during passive rotation is accomplished through plastic 123 510 Exp Brain Res (2008) 187:509–523 Fig. 1 Illustration of the Coriolis force perturbation of the arm relative to the torso produced during a Simple Reach made in a rotating room turning counterclockwise at a constant velocity. The Coriolis force (Fcor) magnitude is twice the product of the arm mass (m), arm velocity relative to the torso (v) and body angular velocity in space, , and its direction is orthogonal to both v and changes in internal models of the muscle activations associated with intended kinematics (Lackner and DiZio 1994, 2005). Adaptation of reaching movements to mechanical analogs of Coriolis forces, planar curl Welds imposed by a robotic manipulandum, is also thought to reXect the structure and formation of an internal model (Shadmehr and Mussa-Ivaldi 1994). In a fully enclosed slow-rotation-room (SRR), the Coriolis acceleration is due to the passive rotation, SRR, of the torso delivered in a way which eliminates sensory and cognitive cues signifying rotation. The subject always feels perfectly stationary. In robotic force Weld experiments (Shadmehr et al. 1993; Shadmehr and Mussa-Ivaldi 1994), the torso does not move. In both paradigms, the reaching task presented to the CNS is equivalent in torso and world frames of reference, both paradigms initially evoke reaching errors, and both involve feed forward control through adaptable internal models. Voluntary torso rotations in a stationary environment also generate Coriolis accelerations on the moving arm (see Fig. 2). During voluntary turn and reach (T&R) movements, the peak velocity of the arm relative to the torso and the peak rotational velocity of the torso, Torso, occur very close together so that Coriolis forces on the arm are actually maximized (cf. Pigeon et al. 2003a, b). However, the accuracy of reaching movements made at diVerent speeds with and without voluntary torso rotation is not aVected by the Coriolis forces. The goal of the present paper is to test the hypothesis that during voluntary T&R movements, the CNS compensates in a feed forward fashion for the torso-relative Coriolis forces that are generated on the reaching arm, thus preventing the forces from disrupting performance. Because of the additional degrees of freedom of free torso rotation in the T&R paradigm relative to the SRR and robotic force Weld paradigms, it is by no means certain that the modes of 123 Fig. 2 Experimental set-up, showing the subject’s starting position and the locations of the targets for T&R movements, requiring a torso turn and an arm reach, and Simple Reach movements, requiring mostly arm reaching with little torso rotation compensation will be identical. For example, one component of compensation in the T&R paradigm is a potentially plastic representation of torso rotation relative to world coordinates (Hudson et al. 2005). This factor is not relevant for the SRR and robotic manipulandum paradigms because neither involves sensory or motor activity related to torso rotation. Our approach was to compare the kinematic and kinetic characteristics of reaching movements made under diVerent speeds of voluntary torso rotation in a stationary environment and during passive torso rotation in a rotating environment. To determine the speciWc patterns of joint torques associated with reaches made during active and passive rotation, it was necessary to develop an inverse dynamics model of the arm and torso appropriate for our test conditions. This model, its rationale, and underlying assumptions are presented in detail in the companion paper (Bortolami et al. 2008). Methods Subjects Six subjects (four males, two females) participated in the SRR experiments and seven subjects (Wve males, two females) participated in the T&R test conditions. Their ages ranged from 19 to 55 years, and they were without physical or neurological deWcits that could have impaired their performance on the experimental tasks. Each subject signed an informed consent form approved by the Brandeis Human Subjects Committee. Exp Brain Res (2008) 187:509–523 511 SRR apparatus and procedure lifted to begin a reach. The target positions were chosen so that one required substantial leftward trunk rotation and arm extension (T&R) and the other involved comparable arm extension relative to the trunk without signiWcant trunk rotation (Simple Reach). The height of the target surface and locations of the targets were chosen so that subjects could perform the T&R movements with a minimum of torso translation and bending and with a reasonably planar arm movement while avoiding the arm joint limits. The T&R target was located at an angle of 105.8° left of midline about the start button and 56.1 cm from the start button; the Simple Reach target was 25.4° left of midline and 30.6 cm from the start position. The table surface was set for each subject at about the height of the T3 spinal segment. Trials were run in blocks of 18, with the two types of movements (T&R and Simple Reach) in random order. Blocks were run at two movement speeds (slow and fast). The slow movements were instructed to be at a pace to pick up an object on the table, the fast movements were meant to be at the speed and accuracy necessary to trap a Xy. All movements were made in complete darkness to prevent diVerences in visually based corrections across movement speeds. An Optotrak™ motion analysis system was used to record at 200 Hz the positions of infrared emitters attached to the tip of the right index Wnger, the styloid process of the ulna (wrist), the lateral epicondyle (elbow), the left and right acromion processes (left and right shoulders), the sternal notch (sternum), and above the left and right eyes. The test subject sat in a chair surrounded by a wrap-around Plexiglas table with a uniform, smooth surface (see Fig. 1) located at the center of the Brandeis SRR, which is a fully enclosed chamber 23 ft in diameter. A start button was located near the proximal edge of the table, near the body midline. A light emitting diode embedded in the underside of the transparent surface served as target. The target was illuminated when the subject depressed the start button with his/her right index Wnger and extinguished when the Wnger was lifted to begin the reach. The target was located 35 cm in front of the start button (target distance) and 5.7° left of the body midline (target longitude). The height of the target surface was approximately 10 cm above the waist. The subject’s head was at the center of rotation. Reaching movements to the target were run in blocks of 8, with 6 blocks for each of the three conditions: pre-, per-, and post-rotation, for a total of 144 reaches per subject. During the pre- and post-rotation conditions: the SRR was stationary. For the per-rotation condition, the SRR was accelerated at 1°/s2 to a constant angular velocity of 60°/s or 120°/s. Three subjects were tested with a per-rotation rate of 60°/s and three at 120°/s. After two minutes had elapsed at constant velocity (to allow any semicircular canal activity to decay) the subject performed the per-rotation reaches. Before the post-rotation reaches, the SRR was decelerated to rest and 2 min were allowed to elapse. Rotational speeds of 60 and 120°/s were chosen because they bracket the speeds of torso rotation seen in natural, voluntary T&R movements. All movements were made in complete darkness (to avoid subjects using visual feedback to correct their movements) and the subjects were instructed to reach rapidly to the target while trying to be accurate. At all stages of the experiment, subjects always felt completely stationary. They kept their body still except when making the pointing movements. An Optotrak™ motion analysis system was used to record at 200 Hz arm motion relative to the rotating room. It tracked the positions of infrared markers attached to the tip of the right index Wnger, the styloid process of the ulna (wrist), the lateral epicondyle (elbow), the left and right acromion processes (left and right shoulders), and the sternal notch (sternum). T&R apparatus and procedure The test subject stood at a wrap-around Plexiglas table with a smooth uniform surface (see Fig. 2). A start button was located at the near edge of the table on the body midline, and light emitting diodes served as targets. A target was illuminated when the subject depressed the start button with his/her right index Wnger and extinguished when the Wnger Kinematics data processing, T&R data Marker frequency content was negligible above 20 Hz. Arm marker positions were numerically diVerentiated twice with a LaGrange Wve-point central approximation formula to obtain marker velocities and accelerations and Wltered before and after each diVerentiation with a seven point, zero lag averaging Wlter. To determine the beginning and end of each movement, we employed a threshold equal to 5% of the peak Wnger velocity or peak trunk angular velocity, whichever occurred Wrst and last, respectively. DiVerences in movement duration across subjects (§10% on average) were compensated for by re-sampling the time series to the average length of the set. For each subject, we averaged together, sample by sample, repetitions within the same conditions (nine T&R slow, nine Simple Reach slow, nine T&R fast, and nine Simple Reach fast). Hereafter, we will simply refer to these averaged time series as arm marker positions. Kinematics data processing, SRR data The same procedures were followed as for the T&R data except for the pooling of data within conditions. We 123 512 averaged, sample-by-sample, the last eight pre-rotation and the last eight per-rotation reaches to constitute the preexposure baseline and the adapted baseline, respectively. The Wrst per-rotation reach and Wrst post-rotation reach were unique trials, which are emphasized in our analyses because they reveal the eVects of unexpected introduction and removal of Coriolis forces. Kinematics data processing, torso rotation and shoulder position Trunk angular velocity, Torso, was calculated from the motions of the markers on the sternum and both shoulders. The companion paper (Bortolami et al. 2008) describes how we derived Torso from these three points, which as a group rotate, and in addition may moderately deform due to shoulder protraction. We obtained torso angular acceleration by numerical diVerentiation and Wltering of the angular velocity as was done with the marker positions. Torso angular position was obtained by integration of Torso. Arm model The variations of the velocity vectors of the hand and forearm markers in our T&R and SRR data were nearly planar. However, the motion of the upper arm had an oV-plane component due to shoulder abduction during reaching. For T&R movements, the hand and forearm had oV-plane velocity components within 10% rms of their respective peak velocities (the projected hand and forearm length variations were approximately 4 and 2% rms of their respective mean values). For the SRR paradigm, the corresponding length variations with respect to average values were 1 and 0.5% rms, respectively, for the forearm and hand. Consequently, we modeled the forearm and hand as rigid bodies in planar motion. The variation of the projected length of the upper arm for the T&R paradigm was approximately 19% of its maximum during Simple Reaches and approximately 25.5% during T&R movements. For the SRR, the variation of the projected length of the upper arm was about 19%. Therefore, we modeled the upper arm as an extendable planar link, which enabled us to account for the eVect of upper arm abduction and shoulder protraction (shoulder protraction is a much smaller component than the upper arm abduction) on the horizontal plane dynamics. The details are presented in the companion paper (Bortolami et al. 2008). To obtain the reduced planar equations of motion of the upper arm, we projected the 6 degrees of freedom dynamics equations of the upper arm onto the horizontal plane. We used rigid body models in planar motion for the forearm and hand. Masses, inertias, and center of mass locations of the arm segments were calculated by means of a regression model (Zatsiorsky and Seluyanov 1985). 123 Exp Brain Res (2008) 187:509–523 Inverse dynamics To calculate the multisegmental inverse dynamics from the kinematics data we used the Cartesian Coordinate approach (Nikravesh 1988). We expressed the kinematics of the arm with respect to a moving, torso-Wxed reference frame with the origin S located at the shoulder. Figure 3 shows the environment frame, which is the frame with respect to which the kinematics data are collected (EXEY) and the torso reference frame (XY) with respect to which the kinematics of the arm motion are calculated. Arm kinetics were apportioned to force components associated with torso and arm motions as follows: RSHOULDER TRAN torso translation and shoulder protraction; RTORSO ANG ACC torso and environment angular acceleration; RRELATIVE arm motion relative to the torso; torso and environment angular velocity; RCENTRIFUGAL RCORIOLIS environment and torso Coriolis accelerations. These are generalized joint forces that have the following structure (R = Rx1, Ry1, 1, Rx2, Ry2, 2, Rx3, Ry3, 3) where the components Rx and Ry represent the forces exchanged at a speciWc joint while represents the related joint torque components. In our Results and Discussion sections we present the joint torque components of the Rs, which are labeled here, respectively, SHOULDER, TORSO ANG ACC, Fig. 3 Multibody representation of the torso and arm during reaching. The Wgure indicates the orientation of the torso reference frame with respect to the frame of the enviroment. S symbolizes the shoulder (see text) and origin of the torso reference frame with respect to which the motion of all of the other links is referred. The segments are drawn separated to indicate the joint torques and forces exchanged between the segments, which constitute the inverse dynamics of the arm motion. Each other segment’s reference frame is Wxed with respect to the segment, located at its center of mass and oriented along its longitudinal axis. The link-Wxed references are in planar motion with respect to the torso reference Exp Brain Res (2008) 187:509–523 RELATIVE, CENTRIFUGAL, and CORIOLIS. The sign of the torques is representative of the muscle action. For example, Coriolis forces during a leftward T&R movement tend to extend the right upper arm and forearm, therefore, a Xexing torque developed at a joint to counteract the Coriolis perturbation is deWned as a positive . RELATIVE represents the torque components that are computed by inverse dynamics equations using the accelerations of the arm segments measured in the frame of reference of the torso. TORSO ANG ACC represents torques due to torso and environment angular acceleration. It causes tangential accelerations on the arm. CENTRIFUGAL includes torques due to angular velocity of the torso and of the environment. It causes centrifugal accelerations on the arm. SHOULDER represents the torque due to shoulder translation, which results from torso translation and shoulder protraction. CORIOLIS is the Coriolis component caused by the simultaneous translation of the arm and rotation of the environment or the torso. The sum of SHOULDER TRAN + TORSO ANG ACC + RELATIVE + CENTRIFUGAL + CORIOLIS will be referred to as “total torque”. These total torques are indicated in Fig. 3, respectively, for shoulder, elbow, and wrist as s, e, and w. Sainburg (2002) uses the term “muscle torque” for what we call total torque. Our analysis is designed to show the segmental forces caused by external inertial forces attributable to voluntary or passive torso rotation and translation. For this reason, we do not partition out the inter-brachial forces entirely attributable to arm segment motions in relation to one another. Our relative torque includes what Hollerbach and Flash (1982) called “normal inertial interaction” plus their “Coriolis” and “centripetal torques”. Our TORSO ANG ACC, SHOULDER TRAN, CENTRIFUGAL, and CORIOLIS are the additional torques generated at the shoulder, elbow, and wrist by the 513 translation and rotation of the torso. These torques were not treated by Hollerbach and Flash nor by later investigators whose paradigms typically involve a stationary torso. All inverse dynamics calculations are aVected by uncertainty. Uncertainty arises from the variability of the data used and its interaction with the non-linear nature of the inverse dynamics equations (cf. Bortolami et al. 1997a, b). The Optotrak™ system we used to track marker positions is accurate to within 0.5 mm £ 0.5 mm £ 0.5 mm rms. Masses, inertias, and center of mass locations of the subject’s arm segments were calculated by means of the regression model of Zatsiorsky and Seluyanov (1985). To evaluate the reliability of our inverse dynamics calculations we applied the numerical procedure to the average kinematics data of eight fast T&R movements for one subject. Then we fed the algorithm the same average position data plus and minus one standard deviation. Figure 4 shows that the resulting torques vary somewhat in magnitude and shape and location of their maxima, but that their basic patterns are quite well preserved. Results Accuracy The statistical analysis of movement endpoint began with separate one-way ANOVAs of the T&R and SRR lateral endpoint errors. The T&R ANOVA included two factors, movement type (Simple Reach, T&R) and movement speed (slow, fast), and it showed no main eVects or interaction eVects on movement endpoint. Bonferroni corrected t tests comparing across conditions indicated that the endpoint accuracy of T&R slow and fast movements did not diVer Fig. 4 Evaluation of the sensitivity of the inverse dynamics calculations due to the intrinsic variability of measurements, data processing, and calculation. The data utilized are also plotted in Fig. 5 123 514 Exp Brain Res (2008) 187:509–523 from each other or from that of slow and fast Simple Reaches either in distance or lateral position. Although nonsigniWcant diVerence can be due to a lack of power, these nonsigniWcant results are consistent with a previous study (Pigeon et al 2003a) that had greater statistical power and found no diVerences. Throughout this paper, wherever an ANOVA is followed by pair-wise comparisons, those comparisons were conducted with t-tests corrected for the number of comparisons with the Bonferroni method. Unless otherwise stated, the criterion for signiWcance was P < 0.05, adjusted. The SRR ANOVA included two factors, SRR speed (60 and 120°/s) and rotation period (baseline pre-rotation, initial rotation and Wnal per-rotation), and it showed signiWcant main eVects of both factors as well as a signiWcant interaction of the two factors (P < 0.05, at least). Movement lateral endpoints were signiWcantly diVerent (P < 0.001) for the initial per-rotation reaches at 60 and 120°/s from baseline nonrotating conditions. The deviations were in the direction of the Coriolis forces generated. Endpoint distance was not aVected. The endpoint of the Wnal per-rotation reaches, both at 60 and 120°/s, were not diVerent from baseline (P > 0.05). The endpoints of the initial but not Wnal post-rotation reaches were signiWcantly diVerent from baseline, 60 and 120°/s (P < 0.001). Table 1 summarizes the Wndings. These Wndings indicate that reaching movements made during voluntary rotation of the torso are accurate while those made during passive rotation are not. To see whether feed forward compensations for anticipated Coriolis forces account for the accuracy of reaching during voluntary rotation it is necessary to examine the kinematic and kinetic properties of the reaches in the diVerent conditions. The Wndings would not be surprising if much smaller Coriolis forces were generated during T&R movements than during reaching in the SRR. Table 1 Averages and standard deviations of kinematic characteristics of slow and fast T&R and Simple Reach movements (N = 7), and averages and standard deviations of kinematic characteristics of baseline reaching in the SRR (N = 6) Kinematics Table 1 summarizes the kinematic parameters of the T&R, Simple Reach, and SRR reaching data. On average, across subjects and movement speeds, T&R involved 77° of shoulder Xexion, 88° of elbow extension, and 60° of trunk rotation. Simple Reaches involved a similar range of arm motion (62° of shoulder Xexion, 83° of elbow extension), but very little trunk rotation (9°). T&R movements displaced the Wnger further in external space and lasted longer than Simple Reach movements. The average durations were 0.45 and 0.72 s, respectively, for fast and slow T&R movements and 0.33 and 0.60 s, respectively, for fast and slow Simple Reaches. The peak velocity of the Wnger relative to the torso was 1.7 and 0.86 m/s for fast and slow T&R movements and 1.88 and 1.07 m/s for fast and slow Simple Reaches. These diVerences within speed conditions were not signiWcant. For the SRR data, baseline reaches (combined baselines of 60 and 120°/s rotation sessions) involved 54° of shoulder Xexion, 94° of elbow extension, and 12° of torso rotation. For 60 and 120°/s, respectively, the average durations of the movements were 0.41 and 0.37 s for baseline reaches, 0.37 and 0.38 s for the Wrst per-rotation reaches, 0.42 and 0.38 s for adapted per-rotation reaches, and 0.45 and 0.39 s for Wrst post-rotation reaches. The peak velocity of the Wnger in relation to the torso was 1.48 m/s in the SRR baseline trials and did not diVer signiWcantly in any of the per- and post-rotation movements for either the 60 and 120°/s conditions. Kinetics We calculated the complete set of component torques for subjects in the T&R and SRR experiments (See Figs. 5, 6, 7). Turn and Reach Simple Reach Fast Fast Slow Finger peak vel. relative to torso (m/s) 1.71 § 0.06 0.86 § 0.17 Torso peak ang. vel. (°/s) 204 § 47 Torso ang. displ. (°) 136 § 22 SRR Slow 1.88 § 0.42 1.07 § 0.16 1.48 § 0.38* 54 § 24 35 § 17 9.5 § 10* 59 § 9 62 § 11 9§5 11 § 6 12.0 § 11.5* 510 § 270 216 § 68 429 § 149 210 § 44 186 § 66* Shoulder peak Xexion (°) 81 § 23 73 § 20 66 § 13 60 § 14 54 § 13* Elbow peak ext. vel. (°/s) 430 § 216 191 § 49 504 § 169 255 § 43 322 § 101* Shoulder peak Xexion vel. (°/s) Elbow ext. displ. (°) 93 § 17 86 § 20 86 § 9 83 § 13 94 § 15* Finger reach distance error (cm) 0.0 § 2.6 0.8 § 2.4 1.7 § 2.4 2.4 § 2.3 ¡0.2 § 1.8* ¡1.0 § 2.4a a Per-rotation reaches in SRR @ 60°/s b Per-rotation reaches in SRR @ 120°/s * Baseline reaches in SRR 123 2.2 § 2.5b Finger reach longitude error (°) ¡5.2 § 3.5 ¡4.2 § 3.7 ¡0.8 § 4.9 ¡0.5 § 4.4 0.1 § 2.7* 5.9 § 3.6a 11.8 § 7.6b Exp Brain Res (2008) 187:509–523 515 Fig. 6 Torques produced at the shoulder and elbow joints during reaching at 60°/s in the SRR. The Wgure shows the torques related to baseline reaching when the room is not rotating, during the Wrst reach while the room is rotating, during the Wnal, adapted reach while the room is rotating, and during the Wrst reach after the room has stopped. The total torque (black) is plotted as well as the same torque components described in Fig. 5. The plotted torques are the compensations exerted by the muscles to the listed actions Fig. 5 Torques produced at the shoulder and elbow joints during fast and slow T&R movements and Simple Reaches. The total torque (black) is plotted as well as the components due to simultaneous arm translation relative to the torso (Relative, blue) and torso angular velocity (Coriolis, red) and acceleration (Torso Angular Acceleration, cyan), centrifugal forces (Torso and Environment Centrifugal, violet), and shoulder translatory acceleration (Shoulder Translation, green). The plotted torques are the compensations exerted by the muscles to the listed actions For each subject in the T&R experiment we averaged the kinematics for each movement type, T&R slow and fast and Simple Reach slow and fast. These values were the input for the torque calculations. For each SRR subject, we used the average kinematics of the baseline, Wrst per-rotation, adapted per-rotation, and Wrst post-rotation reaches as the input for torque calculations. For statistical purposes, each shoulder and elbow torque time series was characterized in terms of peak Xexion (maxima) and extension (minima) torque. A complete summary of the composite torques for the diVerent test conditions is presented in Tables 2, 3 and 4. In the tables, the peak total torques are not simple sums of the peaks of the individual torque components because the maxima and minima of the components do not occur at the same time. For the T&R paradigm we performed a MANOVA on all of the torque components to assess the eVects of movement type (T&R versus Simple Reach) and movement speed (fast versus slow). For the reaches in the SRR, twoway repeated measure MANOVAs were performed to evaluate the eVects of rotation speed (60°/s vs. 120°/s) and reach type (baseline versus Wrst per-rotation versus perrotation adapted versus Wrst post-rotation) on the torque components. Both MANOVAs showed signiWcant main eVects and interaction eVects (P < 0.05, at least), so they were followed by speciWc pair-wise comparisons, reported below. Total torque T&R paradigm: peak Xexion values more than double at the shoulder (P < 0.01) and elbow (P < 0.05) for fast versus slow movements both for T&R and Simple Reaches. Shoulder peak torque extension also doubles with increased speed (P < 0.01), but elbow extension torque is insensitive to movement speed. Total shoulder Xexion (P < 0.05) and elbow extension (P < 0.01) torques diVer between T&R and Simple Reach while their opposite extremes, shoulder 123 516 Exp Brain Res (2008) 187:509–523 to the torso for T&R movements and Simple Reaches. SRR paradigm: relative torques at the shoulder were not signiWcantly diVerent across movement types and room speeds, and similarly for the elbow except for elbow Xexion during movements made at 60°/s versus 120°/s; P < 0.05 (cf. Table 4). Coriolis torque Fig. 7 Torques produced at the shoulder and elbow joints during reaching at 120°/s in the SRR. The organization of the Wgure is the same as Fig. 6 extension and elbow Xexion, do not. SRR paradigm: shoulder Xexion and elbow extension peak torques are insensitive both to movement type (baseline versus Wrst per-rotation versus adapted versus Wrst post-rotation) and SRR speed (60 and 120°/s), while elbow Xexion and shoulder extension values are diVerent (P < 0.01) between movement types, and elbow Xexion values increase with SRR speed. Relative torque T&R paradigm: the size and shape of the apparent joint torques, i.e., the torques solely required by the relative motion of the arm with respect to the torso, are comparable for T&R and Simple Reach movements of the same speeds, slow or fast (cf. Table 2). The Xexion and extension peaks of relative torque also occur at approximately the same proportion of movement time for the T&R and Simple Reaches. Relative shoulder torques more than double for fast versus slow movements (P < 0.01). Elbow torques are overall much smaller than shoulder torques and are less for slow versus fast movements (Table 2). The relative torques at the shoulder and elbow are insensitive to movement type (T&R versus Simple Reach). This result was expected and demonstrates that the targets we chose elicited arm movements having the same kinematics and kinetics with respect 123 The Coriolis torque proWles are unidirectional, always having maxima in the direction of Xexion for both shoulder and elbow. T&R paradigm: Coriolis torques: (1) are four to seven times larger in T&R movements than Simple Reaches at the same speeds (P < 0.01), (2) are more than double in fast versus slow T&R movements (P < 0.01), and (3) are greater at the shoulder than the elbow in comparable conditions (cf. Table 2). Two-way ANOVAs also showed an interaction eVect of movement type and movement speed on the Coriolis force at the shoulder (P < 0.01) and the elbow (P < 0.05). SRR paradigm: Analogous results are found for reaching movements in the SRR. Coriolis peaks at both shoulder and elbow are signiWcantly larger (P < 0.01) during rotation versus baseline movements. The baseline reaches have minimal Coriolis torques (cf. Table 3) while the adapted reaches during rotation have maximum Coriolis torques. Coriolis torque is also increased by SRR room speed (P < 0.05, 120°/s vs. 60°/s) as expected. Translation torque Torso translation and shoulder protraction (to a very small extent) are responsible for this torque component. T&R paradigm: For fast and slow reaches translation torque Xexion was signiWcantly greater (P < 0.01) at the elbow and shoulder for T&R versus Simple Reach movements. SRR paradigm: shoulder extension and Xexion values are insensitive to movement type or SRR speed. Torso angular acceleration T&R paradigm: speed of execution aVected torso acceleration for both T&R and Simple Reach movements. As a consequence, both shoulder and elbow extension and Xexion peak torque values were signiWcantly diVerent (P < 0.01) across movement types and speed. SRR paradigm: torso angular acceleration was statistically indistinguishable across reaching conditions and SRR rotation speeds, and there were no torque diVerences among conditions. This is predictable because in the SRR the torso is rotated passively and reaching movements are comparable in torso acceleration to the baseline reaches, which also involve very little torso angular acceleration. Exp Brain Res (2008) 187:509–523 517 Table 2 Medians and inter-quartile ranges (N = 7) of maxima and minima of joint torques (Nm) of the arm during T&R and Simple Reach movements made in the dark Turn and Reach Simple Reach Fast Slow Fast Slow Shoulder total torque 7.1 (6.1, 8.9) 2.9 (2.3, 3.4) 4.5 (3.4, 5.7) 1.8 (1.3, 1.9) Shoulder relative torque 5.0 (4.3, 6.8) 1.9 (1.2, 2.4) 4.4 (3.9, 6.0) 1.9 (1.1, 2.0) Shoulder torso ang acc torque 1.8 (1.3, 2.3) 0.8 (0.6, 1.0) 0.8 (0.6, 1.5) 0.3 (0.2, 0.4) Shoulder coriolis torque 3.1 (2.9, 3.7) 1.1 (1.0, 1.2) 0.8 (0.4, 0.9) 0.2 (0.1, 0.4) Shoulder centrifugal torque – – – – Shoulder translation torque 2.0 (1.7, 2.6) 0.8 (0.6, 0.8) 0.6 (0.3, 0.8) 0.1 (0.1, 0.2) Flexion MAX Elbow total torque 1.7 (1.5, 2.0) 0.9 (0.8, 0.9) 0.7 (0.6, 0.8) 0.3 (0.3, 0.3) Elbow relative torque 1.0 (1.0, 1.3) 0.4 (0.4, 0.4) 0.7 (0.5, 0.9) 0.3 (0.2, 0.3) Elbow torso ang acc torque 0.7 (0.6, 0.8) 0.3 (0.3, 0.3) 0.4 (0.3, 0.6) 0.1 (0.1, 0.2) Elbow coriolis torque 2.0 (1.7, 2.1) 0.7 (0.7, 0.8) 0.4 (0.2, 0.5) 0.1 (0.1, 0.2) Elbow centrifugal torque 0.4 (0.4, 0.6) 0.2 (0.2, 0.3) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) Elbow translation torque 0.9 (0.7, 1.0) 0.3 (0.3, 0.4) 0.3 (0.2, 0.3) 0.1 (0.1, 0.1) Extension MIN Shoulder total torque ¡3.9 (¡4.6, ¡3.1) ¡1.6 (¡1.8, ¡1.4) ¡3.1 (¡3.9, ¡2.7) ¡1.4 (¡1.4, ¡1.2) Shoulder relative torque ¡5.4 (¡6.9, ¡4.8) ¡2.2 (¡2.7, ¡1.4) ¡3.9 (¡4.9, ¡3.1) ¡1.6 (¡1.9, ¡1.2) Shoulder torso ang acc torque ¡4.5 (¡5.2, ¡3.8) ¡1.8 (¡1.9, ¡1.5) ¡1.4 (¡2.4, ¡1.2) ¡0.5 (¡0.7, ¡0.3) Shoulder coriolis torque – – – – Shoulder centrifugal torque – – – – Shoulder translation torque ¡0.1 (¡0.2, 0.0) 0.0 (¡0.1, 0.1) ¡0.3 (¡0.5, ¡0.1) ¡0.1 (¡0.1, ¡0.1) Elbow total torque ¡0.5 (¡0.6, ¡0.5) ¡0.2 (¡0.2, ¡0.2) ¡1.0 (¡1.1, ¡0.9) ¡0.4 (¡0.5, ¡0.4) Elbow relative torque ¡1.4 (¡1.7, ¡1.1) ¡0.5 (¡0.6, ¡0.4) ¡1.0 (¡1.2, ¡1.0) ¡0.4 (¡0.6, ¡0.4) Elbow torso ang acc torque ¡1.7 (¡2.1, ¡1.5) ¡0.7 (¡0.7, ¡0.6) ¡0.5 (¡0.9, ¡0.5) ¡0.2 (¡0.3, ¡0.1) Elbow coriolis torque – – – – Elbow centrifugal torque – – – – Elbow translation torque ¡0.6 (¡0.6, ¡0.6) ¡0.3 (¡0.3, ¡0.2) ¡0.2 (¡0.3, ¡0.2) ¡0.1 (¡0.1, ¡0.1) Centrifugal torque T&R paradigm: centrifugal torques, were negligible except at the elbow during fast and slow T&R, where there is a signiWcant eVect (P < 0.01) of movement speed. SRR paradigm: centrifugal torque increases with room speed, consequently there is a signiWcant eVect (P < 0.01) of movement type and room speed. Comparison of torque components of T&R movements versus SRR movements A one-way MANOVA was conducted to compare the torque components in T&R and SRR conditions with signiWcant Coriolis perturbations (Conditions: Initial reaches in the SRR at 60°/s, Initial reaches in the SRR at 120°/s, T&R slow reaches, T&R fast reaches). There was a signiWcant main eVect of condition (P < 0.05), so we made pairwise comparisons of SRR and T&R conditions. T&R movements involved signiWcantly higher shoulder transla- tion and torso angular acceleration components than movements made at 60 and 120°/s in the SRR. Total torque at the shoulder was also higher for the T&R movements than the reaches during 60 and 120°/s rotation in the SRR. Next, we conducted a regression analysis (and ANOVA) of the relationship of shoulder torque to longitudinal (lateral) endpoints of T&R movements and of movements during rotation in the SRR. We used as predictors the peak values of: (1) total shoulder torque, (2) torque generated at the shoulder by the torso angular acceleration, (3) torque generated at the shoulder by torso translation, and (4) Coriolis torque generated at the shoulder. The regression analysis indicated that only the Coriolis torque peak values across the subjects and conditions were a signiWcant predictor (P < 0.05) of lateral endpoint errors. Figure 8 plots the relationship between endpoint errors and Coriolis torque peak values for T&R and Simple Reach, fast and slow. For the SRR reaches, the endpoint errors are plotted for the baseline reaches and the initial per-rotation movements at 60 and 120°/s. For both T&R and SRR movements during 123 518 Exp Brain Res (2008) 187:509–523 Table 3 Medians and inter-quartile ranges of maxima and minima of joint torques (Nm) of baseline and Wrst per-rotation reaches made in the SRR at 60°/s and 120°/s passive rotation Baseline First Per-Rotation 60°/s 120°/s 60°/s 120°/s Shoulder total torque 2.5 (1.6, 2.8) 2.2 (1.6, 2.4) 2.3 (1.9, 2.9) 2.6 (2.5, 3.1) Shoulder relative torque 2.4 (1.7, 2.7) 2.1 (1.6, 2.5) 1.3 (1.3, 2.0) 1.2 (1.1, 2.7) Shoulder torso ang acc torque 0.4 (0.3, 0.4) 0.2 (0.1, 0.4) 0.5 (0.5, 0.9) 0.4 (0.4, 1.0) Shoulder coriolis torque 0.2 (0.1, 0.3) 0.0 (0.0, 0.3) 1.2 (1.0, 1.5) 2.1 (1.8, 2.8) Shoulder centrifugal torque 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) 0.2 (0.2, 0.2) 0.8 (0.8, 0.8) Shoulder translation torque 0.2 (0.1, 0.3) 0.3 (0.2, 0.5) 0.2 (0.2, 0.4) 0.2 (0.1, 0.5) Elbow total torque 0.6 (0.5, 0.7) 0.5 (0.5, 1.1) 1.2 (1.2, 1.4) 2.1 (1.9, 2.6) Elbow relative torque 0.6 (0.5, 0.7) 0.5 (0.5, 1.0) 1.1 (0.9, 1.2) 1.4 (1.1, 2.0) Elbow torso ang acc torque 0.1 (0.1, 0.1) 0.1 (0.0, 0.1) 0.2 (0.1, 0.3) 0.1 (0.1, 0.3) Elbow coriolis torque 0.1 (0.0, 0.1) 0.0 (0.0, 0.1) 0.4 (0.4, 0.5) 0.7 (0.7, 0.9) Elbow centrifugal torque 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) 0.1 (0.1, 0.1) 0.3 (0.3, 0.3) Elbow translation torque 0.1 (0.1, 0.1) 0.1 (0.0, 0.1) 0.2 (0.2, 0.2) 0.3 (0.3, 0.3) Flexion Extension Shoulder total torque ¡1.8 (¡2.2, ¡1.3) ¡1.8 (¡2.4, ¡1.5) ¡1.0 (¡1.3, ¡0.8) ¡0.1 (¡0.5, 0.0) Shoulder relative torque ¡1.5 (¡1.9, ¡1.2) ¡1.9 (¡2.2, ¡1.6) ¡1.5 (¡1.7, ¡1.4) ¡1.9 (¡2.9, ¡1.6) Shoulder torso ang acc torque ¡0.8 (¡1.0, ¡0.5) ¡0.2 (¡1.2, ¡0.2) ¡0.5 (¡1.3, ¡0.4) ¡0.5 (¡1.7, ¡0.4) Shoulder coriolis torque – – – – Shoulder centrifugal torque 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) 0.2 (0.1, 0.2) 0.6 (0.6, 0.6) Shoulder translation torque ¡0.2 (¡0.3, ¡0.1) ¡0.2 (¡0.5, ¡0.2) ¡0.3 (¡0.3, ¡0.2) ¡0.3 (¡0.5, ¡0.3) Elbow total torque ¡1.4 (¡1.6, ¡1.1) ¡1.4 (¡2.1, ¡1.3) ¡1.3 (¡1.4, ¡1.2) ¡1.6 (¡2.0, ¡1.1) Elbow relative torque ¡1.4 (¡1.5, ¡1.1) ¡1.4 (¡2.1, ¡1.3) ¡1.5 (¡1.6, ¡1.5) ¡2.0 (¡2.5, ¡1.5) Elbow torso ang acc torque ¡0.2 (¡0.3, ¡0.1) ¡0.1 (¡0.4, ¡0.1) ¡0.2 (¡0.4, ¡0.1) ¡0.2 (¡0.6, ¡0.1) Elbow coriolis torque – – – – Elbow centrifugal torque 0.0, (0.0, 0.0) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) Elbow translation torque ¡0.1 (¡0.1, ¡0.1) ¡0.1 (¡0.1, ¡0.1) ¡0.2 (¡0.2, ¡0.1) 0.0 (0.0, 0.0) rotation the Coriolis forces acted in the direction of shoulder extension. The slopes of the regression lines are very diVerent for the two cases. For T&R movements, the slope is shallow and negative and there are small errors in the Xexion direction, the direction opposite the Coriolis force generated during the movements. The best Wtting regeression line is: Y = ¡0.69 ¡ 0.45 £ X. The slope of the Wt is not signiWcantly diVerent from zero (P > 0.05, F = 2.39). By contrast, for the SRR reaches the slope is steep and positive and the errors are in the direction of shoulder extension, the same direction as the Coriolis forces generated by the movements. The best Wtting regression line is: Y = ¡2.21 + 4.2 £ X. The slope of the Wt is signiWcantly diVerent from zero (P < 0.05, F = 31.7). SRR reaches: adapted versus non-adapted Figure 6 provides an example of torques for the baseline, initial per-rotation and Wnal (adapted) per-rotation, and ini- 123 tial post-rotation movements made by subjects at 60°/s. Several features stand out: (1) the torque proWles of the initial per-rotation movements are “jittery” not smooth like the pre-rotation movements, (2) the torque proWles of the Wnal per-rotation movements are as smooth as those of the pre-rotation movements, and (3) the initial post-rotation movements are again jittery. The torque proWles for the Wrst per-rotation and Wrst post-rotation reaches are not smooth largely because they were computed on kinematic data from single reaches for each subject, whereas the baseline and adapted reach torque proWles were each computed on several reaches per subject. The nature of the initial disruption can be seen by comparing the proWles of the baseline reaches and the initial per-rotation reaches. The compensation achieved with additional reaching movements that restores reaching accuracy can be seen by subtracting the torque proWles of the baseline and Wnal per-rotation, adapted reaches (see Fig. 9). It is the persistence of this compensation when no longer necessary in the initial post- Exp Brain Res (2008) 187:509–523 519 Table 4 Medians and inter-quartile ranges of maxima and minima of joint torques (Nm) of the adapted reaches and Wrst post-rotation reaches in the SRR at 60 and 120°/s passive rotation Adapted Reach First Post-Rotation 60°/s 120°/s 60°/s 120°/s 2.9 (2.2, 3.0) 2.8 (2.4, 3.4) 2.8 (2.0, 3.1) 2.6 (2.1, 3.1) Shoulder relative torque 2.2 (1.7, 2.3) 1.7 (1.2, 2.4) 2.3 (1.9, 2.8) 2.6 (2.1, 3.1) Shoulder torso ang acc torque 0.2 (0.2, 0.4) 0.1 (0.1, 0.4) 0.6 (0.5, 0.7) 0.3 (0.3, 0.8) Shoulder coriolis torque 1.2 (1.0, 1.6) 1.8 (1.7, 2.8) 0.2 (0.1, 0.2) 0.1 (0.1, 0.3) Shoulder centrifugal torque 0.2 (0.2, 0.2) 0.6 (0.6, 0.7) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) Shoulder translation torque 0.1 (0.1, 0.4) 0.1 (0.1, 0.3) 0.3 (0.3, 0.3) 0.3 (0.3, 0.5) Elbow total torque 0.9 (0.9, 1.0) 1.4 (1.4, 2.1) 0.5 (0.4, 0.5) 1.0 (0.8, 1.2) Elbow relative torque 0.6 (0.5, 0.6) 0.7 (0.6, 1.4) 0.5 (0.5, 0.5) 1.0 (0.8, 1.3) Elbow torso ang acc torque 0.1 (0.1, 0.1) 0.0 (0.0, 0.1) 0.2 (0.2, 0.2) 0.1 (0.1, 0.3) Elbow coriolis torque 0.5 (0.4, 0.6) 0.8 (0.7, 1.1) 0.1 (0.0, 0.1) 0.0 (0.0, 0.1) Elbow centrifugal torque 0.1 (0.1, 0.1) 0.2 (0.2, 0.2) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) Elbow translation torque 0.1 (0.1, 0.2) 0.3 (0.3, 0.3) 0.1 (0.1, 0.1) 0.1 (0.1, 0.2) Flexion Shoulder total torque Extension Shoulder total torque ¡0.6 (¡0.9, ¡0.6) 0.3 (¡0.3, 0.3) ¡2.4 (¡2.6, ¡1.9) ¡2.3 (¡3.2, ¡2.1) Shoulder relative torque ¡1.8 (¡1.9, ¡1.6) ¡1.1 (¡2.0, ¡1.1) ¡2.6 (¡2.8, ¡2.2) ¡2.3 (¡3.0, ¡2.2) Shoulder torso ang acc torque ¡0.4 (¡0.9, ¡0.4) ¡0.1 (¡0.7, ¡0.1) ¡1.2 (¡1.2, ¡0.9) ¡0.9 (¡1.5, ¡0.7) Shoulder coriolis torque – – – – Shoulder centrifugal torque 0.1 (0.1, 0.1) 0.5 (0.5, 0.5) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) Shoulder translation torque ¡0.2 (¡0.3, ¡0.1) ¡0.4 (¡0.4, ¡0.3) ¡0.3 (¡0.3, ¡0.3) ¡0.3 (¡0.5, ¡0.3) Elbow total torque ¡0.9 (¡1.3, ¡0.8) ¡1.1 (¡1.6, ¡0.8) ¡1.1 (¡1.4, ¡1.0) ¡1.4 (¡1.7, ¡1.1) Elbow relative torque ¡1.2 (¡1.6, ¡1.1) ¡1.5 (¡2.2, ¡1.2) ¡1.1 (¡1.4, ¡1.0) ¡1.4 (¡1.7, ¡1.2) Elbow torso ang acc torque ¡0.1 (¡0.3, ¡0.1) 0.0 (¡0.2, 0.0) ¡0.3 (¡0.4, ¡0.3) ¡0.3 (¡0.5, ¡0.2) Elbow coriolis torque – – – – Elbow centrifugal torque 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) 0.0 (0.0, 0.0) Elbow translation torque 0.0 (¡0.1, 0.0) 0.1 (0.0, 0.1) ¡0.2 (¡0.2, ¡0.2) ¡0.1 (¡0.2, ¡0.1) rotation movements that causes renewed lateral endpoint errors. Discussion Our goal was to test the hypothesis that the CNS compensates in a feed forward fashion for the Coriolis forces that are generated on the moving arm when reaching movements are made during voluntary trunk rotation. Such movements are as accurate as those made with the trunk stationary and are little aVected by movement speed. By contrast, reaching movements made during passive body rotation are initially inaccurate and errors are even greater with higher rotation speeds. To determine whether this diVerence in reaching endpoint accuracy was related to smaller torques being generated on the arm during voluntary as compared with passive torso rotation it was necessary to compute the torques involved. To achieve this analysis we developed an inverse dynamics model that allowed us to compare the total torque and the torque components present on the arm during voluntary and passive torso rotation. The model is presented in the companion paper (Bortolami et al. 2008). We have found that there were a number of large and signiWcant changes in torque components when reaching movements were made during passive or active torso rotation compared with stationary reaches. These changes are large both in absolute terms and in relation to torques solely related to moving the arm relative to the torso. All of the torques at the shoulder and elbow related to or aVected by torso rotation (total torque, torso angular acceleration torque, Coriolis torque) were larger during fast voluntary T&R movements than during passive rotation in the SRR (see Tables 2, 3). Our analysis indicated that the crucial torque aVecting endpoint accuracy in the passive rotation conditions was the Coriolis torque. In T&R movements relative to Simple Reaches, the Coriolis Xexion torques resulting 123 520 Fig. 8 Regression plots of lateral reaching errors as function of the Coriolis forces generated by torso and environment rotation. a Reaching errors as a function of self-generated Coriolis torque at the shoulder produced during fast and slow T&R trials. b Reaching errors as a function of the Coriolis torque at the shoulder produced by baseline reaches prior to SRR rotation and during rotation in the SRR at 60 and 120°/s Fig. 9 Torque diVerences between adapted SRR per-rotation reaches and pre-rotation baseline reaches at 60 and 120°/s 123 Exp Brain Res (2008) 187:509–523 from torso rotation increase greatly, sixfold at the shoulder and elbow for fast movements and twofold for slow. The proportion of the relative torque component at the shoulder resulting from the Coriolis torque increased from 50 to 84% for slow Simple versus T&R reaches and from 15 to 55% for fast reaches. The changes were even larger at the elbow. Nevertheless, movement accuracy was preserved. The magnitude of Coriolis shoulder and elbow torques produced by torso rotation which we found is an order of magnitude greater than the Coriolis elbow torques reported by Hollerbach and Flash (1982) due to upper arm rotation. During T&R movements, subjects voluntarily achieved much higher torso rotational velocities than subjects who were passively exposed to rotation in the SRR. Slow T&R movements involved active peak trunk velocities of t140°/ s, and fast t200°/s, compared with SRR passive velocities of 60 and 120°/s. As a consequence, considerably higher Coriolis forces were generated on the reaching arm during T&R movements compared with reaches in the SRR. The Coriolis forces at the shoulder were 1.5 times larger in fast T&R movements than in reaches made at 120°/s in the SRR. The slow T&R movements had Coriolis torques equivalent to those during reaches at 60°/s in the SRR. Nevertheless, T&R movements were little aVected by Coriolis force magnitude whereas initial SRR movements showed signiWcant Coriolis force dependent endpoint errors in the same direction as the Coriolis forces (see Fig. 8). These performance diVerences mean that in T&R movements the CNS must be controlling movement in such a way as to mitigate the consequences of self-generated Coriolis forces related to torso rotation. The nature of this compensation can be computed using the inverse dynamics model presented in the companion paper. This model allows us to simulate the dynamics of a reach made during passive rotation in the SRR and to compare them with the dynamics of a reach made in a stationary environment during voluntary rotation of the torso. Figure 10 shows the results of feeding the measured kinematics of an actual fast Simple Reach (the reach whose dynamics are shown in Fig. 5, which was a straight and accurate reach) into the model along with a simulated constant torso rotation velocity of 60°/s CCW. This simulates our actual 60°/s SRR condition. The calculated joint torques are what must be produced by a subject to achieve the same movement path in the rotating room during rotation at 60°/s. Note that the simulated relative torque has the same value as in Fig. 5 because it is determined by the identical arm motion relative to the torso. However, the torques related to torso rotation, e.g., the Coriolis torque, and consequently the total torque have increased greatly relative to those in Fig. 5 because a reach made at 60°/s in the slow rotation room would be deviated in the direction of the Coriolis force if these joint torque adjustments were not generated. Exp Brain Res (2008) 187:509–523 Fig. 10 Calculated torques necessary during reaching in the SRR to produce the same accurate movement path as a fast Simple Reach whose dynamics are shown in Fig. 5 The simulated joint torques of Fig. 10 match what subjects in fact learn to produce when they are fully adapted in the rotating room (Fig. 6, adapted) and what they fail to produce in their Wrst reaches during constant velocity rotation. The simulated Coriolis torques are only one third as large as the torques generated during an actual fast T&R movement and only half as large as during a slow T&R movement (see Fig. 5). The change in joint torques between fast and slow T&R movements, which do not diVer in movement path or endpoint, is about the same as the torque which adapted subjects in the SRR produce to prevent deviation of their reach by Coriolis forces. In comparing the dynamics of the Simple Reach with those of the simulated reach during 60°/s rotation, it is notable that diVerences in the dynamics are apparent within 50 ms of movement onset. This simulated rapid torque onset agrees with the rapid onset observed in subtracted torque traces of real adapted and unadapted reaches (see Fig. 9). Similarly, comparing the dynamics of the fast Simple Reach of Fig. 5 with the fast T&R reach, it is apparent that diVerences are present within 50 ms of movement onset. These diVerences are the compensations that must be generated to preserve movement accuracy. We believe that the major proportion of these compensations are pre-computed rather than due to passive or reXexive stiVness. This contention is supported by studies of joint stiVness. Flash and Mussa-Ivaldi (1990) and Gomi and Kawato (1996) found shoulder and elbow stiVness during reaching movements made with the torso stationary to be in the range of 10–80 Nm/rad. We can reasonably assume from their results that during a T&R movement shoulder stiVness may be about 50 Nm/rad when the Wnger is extended roughly 50 cm from the shoulder. The increment of torque at the shoulder between fast and slow T&R movements is approximately 4.2 Nm on average (Table 2). With a shoulder stiVness of 50 Nm/rad, the Wnger should have deXected in the direction opposite torso displacement at least an extra 521 4 cm during the fast T&R movements but we found no increase in deXection. The shoulder stiVness would have had to be at least 500 Nm/rad to prevent a deXection of the order of 4 mm and virtually inWnite to explain our Wnding of an absence of a deXection increase. Therefore, passive or quasi-passive properties of the arm cannot explain the accuracy of T&R movements across diVerent torso rotation velocities. Instead, our results indicate that muscles must be activated to produce “pre-computed torques” (cf. Slotine and Li 1990). This assertion does not necessarily imply that the CNS has to compute inverse dynamics equations nor that it has to separately represent the components of torque we have identiWed and quantiWed. Several studies have demonstrated that when an arm movement is combined with trunk translation, kinematic features of the hand path are preserved (Cockell et al. 1995; Ma and Feldman 1995; Pigeon et al. 2000; Wang and Stelmach 1998; Marteniuk et al. 2000). In particular, the translation of the trunk in the sagittal plane does not inXuence the hand trajectory in relation to the target (Kaminski et al. 1995; Ma and Feldman 1995; Saling et al. 1996). The motion of the trunk and arm are smoothly interrelated to bring the hand to the target. When trunk motion outlasts hand motion, the potential inXuence of the continuing trunk movement on hand position is nulliWed by appropriate compensatory modiWcations of elbow and shoulder angles. This phenomenon has been likened to the vestibular-ocular reXex (VOR) that prevents the gaze shift that would otherwise be elicited by head rotation (Pigeon et al. 2000; Pigeon and Feldman 1998). However, the VOR is a kinematic stabilizing mechanism with relatively simple dynamic properties. The kinematics and kinetics analysis that we have presented here shows that any mechanism responsible for compensating for the inXuence of trunk motion on the control of the arm has to control multiple body segments with substantial inertia. The application of our arm movement model and analysis to kinematics data produced during active versus passive torso rotation also provides an avenue for approaching the issue of motor planning. It demonstrates that the inertial loads generated by natural reaching movements involving torso rotation are orders of magnitude greater than those in multi-joint movements not involving torso motion. This unexpected Wnding suggests that to understand normal unconstrained movements it will be critical to understand the forces generated by truncal rotation and how they are controlled. Such information could also illuminate the study of compensations for unexpected perturbations in healthy individuals as well as disorders of motor control. For example, Guillaud et al. (2006) recently showed that reaching movements to Earth- and body-Wxed targets are altered if passive yaw body rotation is imposed unexpectedly at movement onset. They suggested that some of the 123 522 compensations they saw were not fully reXexive. A full analysis of their data with our dynamics model could help separate vestibular (cf Bresciani et al. 2005) and proprioceptive contributions to their results. A variety of disorders leads to speciWc deWcits in control of multi-joint movements when inter-segmental interactions are signiWcant. Subjects without proprioception cannot adequately compensate for naturally occurring inter-segmental forces nor readily learn to compensate for experimentally introduced alterations in inter-segmental forces (Ghez and Sainburg 1995; Gribble and Ostry 1999; Sainburg et al. 1993, 1995). Cerebellar (Bastian et al. 1996; Topka et al. 1998), Parkinson’s (Benecke et al. 1987; Dounskaia et al. 2000; Flash et al. 1992; Poizner et al. 2000; Seidler et al. 2001) and hemiparetic (Beer et al. 2000) patients often can produce normal single joint movements, but when they are required to make multi-joint movements abnormal trajectories result. Such observations point to diYculties in representing or actuating the necessary component torque patterns to achieve desired movement direction and speed during multi-joint movements. Acknowledgments We thank Dr. Alberto Pierobon and Dr. Enrico Chiovetto for technical advice and assistance. Support was provided by grant from the National Institutes of Health, RO1 AR48546–01. References Bastian AJ, Martin TA, Keating JG, Thach WT (1996) Cerebellar ataxia: abnormal control of interaction torques across multiple joints. J Neurophysiol 76:492–509 Beer RF, Dewald JPA, Rymer WZ (2000) DeWcits in the coordination of multijoint arm movements in patients with hemiparesis: evidence for disturbed control of limb dynamics. Exp Brain Res 131:305–319 Benecke R, Rothwell JC, Dick JPR, Day BL, Marsden CD (1987) Simple and complex movements oV and on treatment in patients with Parkinson’s disease. J Neurol Neurosurg Psychiat 50:296–303 Bortolami SB, Riley PO, Krebs DE (1997a) Modeling the systematic uncertainty of photogrammetric tracking of human motion. ASME J Dyn Sys Measure Control 119:358–361 Bortolami SB, Riley PO, Krebs DE (1997b) Numerical DiVerentiation of tracking data of human motion: the virtual accelerometer. ASME J Dyn Sys Measure Control 119:355–358 Bortolami SB, Pigeon P, DiZio P, Lackner JR (2008) Dynamics model for analyzing reaching movements during active and passive torso rotation (submitted) Bresciani JP, Gauthier GM, Vercher JL, Blouin J (2005) On the nature of the vestibular control of arm-reaching movements during whole-body rotations. Exp Brain Res 164:431–441 Cockell DL, Carnahan H, McFadyen BJ (1995) A preliminary analysis of the coordination of reaching, grasping, and walking. Percept Mot Skills 81:515–519 Dounskaia N, Van Gemmert AWA, Stelmach GE (2000) Interjoint coordination during handwriting-like movements. Exp Brain Res 135:127–140 Flash T, Mussa-Ivaldi FA (1990) Human arm stiVness characteristics during maintenance of posture. Exp Brain Res 82:315–326 123 Exp Brain Res (2008) 187:509–523 Flash T, Inzelberg R, Schectman E, Korcyzn AD (1992) Kinematic analysis of upper limb trajectories in Parkinson’s disease. Exp Neurol 118:215–226 Ghez C, Sainburg R (1995) Propriceptive control of interjoint coordination. Can J Physiol Pharmcol 73:273–284 Gomi H, Kawato M (1996) Equilibrium-point control hypothesis examined by measured arm stiVness during multijoint movements. Science 272:117–120 Gribble PL, Ostry DJ (1999) Compensation for interaction torques during single- and multi-joint limb movement. J Neurophysiol 82:2310–2326 Guillaud E, Simoneau M, Gauthier G, Blouin J (2006) Controlling reaching movements during self-motion: body-Wxed versus Earth-Wxed targets. Motor Control 10:330–347 Hollerbach JM, Flash T (1982) Dynamic interactions between limb segments during planar arm movement. Biol Cybernet 44:67–77 Hudson T, Lackner JR, DiZio P (2005) Rapid adaptation of torso pointing movements to perturbations of the base of support. Exp Brain Res 165:283–293 Kaminski TR, Bock C, Gentile AM (1995) The coordination between trunk and arm motion during pointing movements. Exp Brain Res 106:457–466 Lackner JR, DiZio P (1992) Rapid adaptation of arm movement endpoint and trajectory to Coriolis force perturbations. Soc Neurosci Abstr 18:515 Lackner JR, DiZio P (1994) Rapid adaptation to Coriolis force perturbations of arm trajectory. J Neurophysiol 72(1):299–313 Lackner JR, DiZio P (2005) Motor control and learning in altered dynamic environments. Curr Opin Neurobiol 15:653–659 Ma S, Feldman AG (1995) Two functionally diVerent synergies during arm reaching movements involving the trunk. J Neurophysiol 73:2120–2122 Marteniuk RG, Ivens CJ, Bertram CP (2000) Evidence of motor equivalence in a pointing task involving locomotion. Motor Control 4:165–184 Nikravesh PE (1988) Computer-aided analysis of mechanical systems. Prentice Hall, New Jersey Pigeon P, Feldman AG (1998) Compensatory arm-trunk coordination in pointing movements is preserved in the absence of visual feedback. Brain Res 802:274–280 Pigeon P, Bortolami SB, DiZio P, Lackner JR (2003a) Coordinated turn and reach movements. I. Anticipatory compensation for selfgenerated Coriolis and interaction torques. J Neurophysiol, 89:276–289 Pigeon P, Bortolami SB, DiZio P, Lackner JR (2003b) Coordinated turn and reach movements. II. Planning in an external frame of reference. J Neurophysiol 89:290–303 Pigeon P, Yahia LH, Mitnitski AB, Feldman AG (2000) Superposition of independent units of coordination during pointing movements involving the trunk with and without visual feedback. Exp Brain Res 131:336–349 Poizner H, Feldman AG, Levin MF, Berkinblit MB, Hening WA, Patel A, Adamovich SV (2000) The timing of arm-trunk coordination is deWcient and vision-dependent in Parkinson’s patients during reaching movements. Exp Brain Res 133:279–292 Sainburg RL (2002) Evidence for a dynamic-dominance hypothesis of handedness. Exp Brain Res 142(2):241–258 Sainburg RL, Poizner H, Ghez C (1993) Loss of proprioception produces deWcits in interjoint coordination. J Neurophysiol 70:2136– 2147 Sainburg RL, Ghilardi MF, Poizner H, Ghez C (1995) Control of limb dynamics in normal subjects and patients without proprioception. J Neurophysiol 73:820–835 Saling M, Adler CH, Alberts JL, Stelmach GE (1996) Kinematic properties of prehensile movements in Parkinson’s disease patients. Neurol 46:A141 Exp Brain Res (2008) 187:509–523 Seidler RD, Alberts JL, Stelmach GE (2001) Parkinson’s disease aVects the ability to control multijoint movements. Exp Brain Res 14:335–344 Shadmehr R, Mussa-Ivaldi FA, Bizzi E (1993) Postural force Welds of the human arm and their role in generating multi-joint movements. J Neurosci 13:45–62 Shadmehr R, Mussa-Ivaldi FA (1994) Adaptive representation of dynamics during learning of a motor task. J Neurosci 14:3208–24 Slotine J-JE, Li W (1990) Applied nonlinear control. Prentice-Hall, New Jersey 523 Topka H, Konczak J, Schneider K, Boose A, Dichgans J (1998) Multijoint arm movements in cerebellar ataxia: abnormal control of movement dynamics. Exp Brain Res 119:493–503 Wang J, Stelmach GE (1998) Coordination among the body segments during reach-to-grasp action involving the trunk. Exp Brain Res 123:346–350 Zatsiorsky Z, Seluyanov V (1985) Estimation of the mass and inertia characteristics of the human body by means of the best predictive regression equations. Biomechanics IX:233–239 123