Motor control and learning in altered dynamic environments
James R Lackner and Paul DiZio
Dynamic perturbations of reaching movements are an
important technique for studying motor learning and
adaptation. Adaptation to non-contacting, velocity-dependent
inertial Coriolis forces generated by arm movements during
passive body rotation is very rapid, and when complete
the Coriolis forces are no longer sensed. Adaptation to
velocity-dependent forces delivered by a robotic
manipulandum takes longer and the perturbations continue to
be perceived even when adaptation is complete. These
differences reflect adaptive self-calibration of motor control
versus learning the behavior of an external object or ‘tool’.
Velocity-dependent inertial Coriolis forces also arise in
everyday behavior during voluntary turn and reach movements
but because of anticipatory feedforward motor compensations
do not affect movement accuracy despite being larger than the
velocity-dependent forces typically used in experimental
studies. Progress has been made in understanding: the
common features that determine adaptive responses to
velocity-dependent perturbations of jaw and limb movements;
the transfer of adaptation to mechanical perturbations across
different contact sites on a limb; and the parcellation and
separate representation of the static and dynamic components
of multiforce perturbations.
Addresses
Ashton Graybiel Spatial Orientation Laboratory, Brandeis University,
415 South Street, Waltham, Massachusetts, 02454-9110, USA
Corresponding author: Lackner, James R (agsol@brandeis.edu)
Current Opinion in Neurobiology 2005, 15:653–659
This review comes from a themed issue on
Motor systems
Edited by Giacomo Rizzolatti and Daniel M Wolpert
Available online 3rd November 2005
0959-4388/$ – see front matter
# 2005 Elsevier Ltd. All rights reserved.
DOI 10.1016/j.conb.2005.10.012
Introduction
Dynamic perturbations of movement control can involve
sensory or force perturbations. Here, we review studies
concerning adaptation to dynamic inertial and mechanical
perturbations of limb and jaw movements. We show that
inertial perturbations provide insight into mechanisms of
self-calibration of the body and mechanical perturbations
provide insight into tool use and motor learning of object
properties. We identify contact cues as an important way
the central nervous system distinguishes inertial from
mechanical perturbations and adapts in a context-specific
way.
www.sciencedirect.com
Inertial and mechanical perturbations of
limb movements
Adaptation in response to dynamic perturbations of limb
movements was initially identified in rotating environments [1,2]. The velocity-dependent inertial Coriolis
forces (see Glossary) generated by reaching movements
in a rotating environment initially disrupt movement
trajectory and endpoint, a finding in contradiction to
equilibrium point theories (see Glossary) of movement
control [3–5]. However, after about 20 repeated movements, even without visual feedback, normal accuracy is
regained and the reaching individual no longer perceives
the Coriolis force. Post-rotation movement paths are
initially mirror images of the first reaches during rotation,
this demonstrates the persistence of a central feedforward
compensation for the no-longer present Coriolis force.
Moreover, the individual feels a new force deviating the
arm although none is physically present. See Figure 1a
[6].
Later studies used a robotic manipulandum (see Glossary) to create velocity-dependent forces analogous to
inertial Coriolis forces [7]. As the individual moves the
handle to point to visual targets, a programmable force is
applied to deflect its path. With visual feedback, straight
and accurate trajectories can be regained within a hundred or so reaches [8,9]. Even without visual feedback
accuracy can be eventually attained. Upon removal of the
velocity-dependent force field, aftereffects are experienced with movement paths being deflected in the opposite direction to that initially experienced.
Typically, Coriolis force and robotic perturbations are
referred to as comprising ‘dynamic force environments’;
however, they differ physically in several important ways.
Inertial Coriolis forces (and inter-brachial interaction
forces; see Glossary) function without mechanical contact
on the reaching arm. Contact forces (see Glossary) are
obligatory with robotic perturbations and most often are
applied locally to the hand or wrist, but some distribution
of the surface contact is possible with modern devices
such as the recently introduced KINARM (see Glossary)
[10]. Coriolis force magnitudes and directions on the arm
are determined by three variables: the arm mass plus the
mass of any carried objects, the angular velocity of the
torso relative to space, and the linear velocity of the arm
relative to the torso. Robotic experiments are typically
programmed to deliver perturbations contingent on a
single variable — the velocity of the manipulandum in
relation to space. Coriolis forces, in terms of their physical
determinants and non-contacting nature, constitute what
might be considered a platonic or ideal perturbation (see
Current Opinion in Neurobiology 2005, 15:653–659
654 Motor systems
Glossary
Contact forces: Forces that are exerted though contact between
objects, as opposed to forces that act at a distance, such as the force
of gravity. Muscles and tendons apply internal contact forces on
bones that counter external contacting and non-contacting forces.
Coriolis force: A velocity-dependent force that is imposed on
objects when they move in relation to a rotating environment. The
Coriolis force on an object equals its mass, m, times the crossproduct of its linear velocity in the rotating environment, v, and the
angular velocity of the environment, v: FCor = 2m(v v).
De-adaptation: Return to normal behavior following the removal of a
dynamic perturbation to which one had adapted. It is distinguished
from re-adaptation, which refers to general learning of any transition
type between dynamic environments.
Equilibrium point models: These models posit that a neural
executor changes the state of the spinal level of control, and that
movement kinetics and kinematics emerge from the interaction of the
new spinal configuration with the load. This unifies the control of
posture and movement. In the lambda model, descending commands
change the threshold of the stretch reflex. In the alpha model,
descending commands to the alpha motoneurons change the stretch
reflex stiffness.
Inter-brachial interaction forces: Forces that act between the
segments of the moving arm, measurable in the frames of reference of
the moving segments. In a natural arm movement, the upper arm
moves and the motion of the forearm and hand in relation to it
generate Coriolis and centrifugal forces. Accelerations of the distal
segments exert contact forces on more proximal segments.
KINARM: An advanced manipulandum that exerts torques at the
shoulder and elbow to individually perturb the upper arm and forearm
[48].
Manipulandum: A general name for an object, tool or device that one
must move or exert force against with the hand or other body part.
Experiments on dynamic motor control investigate how the dynamics
of manipulanda are controlled and learned.
Platonic or ideal perturbation: Coriolis forces are ideal for the study
of motor calibration of our own bodies because they provide no
contact cues that would give information that the force is external and
information about the pattern of the force. Adaptation must be based
on signals about motion and force from muscles and tendons.
Positive or negative gain: The ratio of output to input in a servo
system. For the servo-controlled platform, a positive gain is when the
platform turns in the same direction relative to space as the torso turns
relative to the platform, and negative gain is when the platform and
torso move in opposite directions.
Servo-controlled platform: A rotary platform with a control system
that allows it to turn relative to space at a rate that is a fraction of the
rate of body rotation relative to it. It creates a situation in which torso
movement relative to the feet and relative to space are different.
Glossary) for testing theories of movement control.
Robotic perturbation paradigms are useful for studying
manipulation of objects and adaptive tool use.
Adaptations to Coriolis forces and robotic dynamic force
fields differ in several ways. Restoration of movement
accuracy during Coriolis force exposure occurs much
more rapidly than it does during robotic perturbations
[1,7]. See Figure 1b. Robotic perturbations wane in
apparent intensity over hundreds of movements but
are never totally inaccessible to consciousness, whereas
after a few tens of movements subjects no longer feel the
presence of the Coriolis forces for which they are successfully compensating. Adaptation to Coriolis forces is only
slightly slower than the decay of aftereffects, whereas deCurrent Opinion in Neurobiology 2005, 15:653–659
adaptation (see Glossary) is much faster than adaptation
for completely novel robotic perturbations [11]. It has
been suggested that de-adapting as well as re-adapting to
a scaled down version of a learned robotic field are quicker
than adapting to the novel field because scaling down an
existing compensation is quicker than learning a new one
[12]. Movement aftereffects experienced following
adaptation to robotic perturbations are contingent on
contact with the device — without contact, little or no
aftereffect is experienced [13]. See Figure 1c. A process
even more rapid than de-adaptation, essentially an instant
switch, occurs in this case.
Coriolis forces and self-calibration
The rapid adaptation to Coriolis forces generated by limb
movements in a passively rotating environment represents one aspect of the continuous, normal process of
sensory–motor self-calibration. In everyday behavior,
very large Coriolis forces are generated on the arm during
simultaneous turning and reaching for an object [14].
Normal people coordinate turn and reach movements
with nearly synchronous torso and arm velocity peaks
(within 75ms), which maximizes the Coriolis force, rather
than segmenting their behavior into turn then reach to
minimize Coriolis forces. The Coriolis forces generated
by voluntary turn and reach movements are orders of
magnitude greater than those in passive rotation studies,
yet they do not affect movement path nor endpoint
accuracy. Movement accuracy in this situation must
reflect the action of feedforward processes that compensate for the effect of the self-generated Coriolis forces on
movement trajectory. Figure 2 shows the movement
trajectories of a subject as she turns and points to a target
and when she reaches holding a 450 g object. There is no
change in movement path nor accuracy, although the
Coriolis torque at the shoulder increases substantially.
Adaptation to a robot involves acquiring a general internal
model of the perturbation, not just learning a stereotyped
compensation for the specific practiced movement [15].
Compensation for self-generated Coriolis forces must
involve feedforward anticipatory control rather than rote
learning of specific patterns for every possible combination of arm and torso speed and grasped mass. Feedforward compensations derived from internal models have
been demonstrated to contribute to learning robotic
dynamic perturbations, and transfer of adaptation occurs
to nearby, non-practiced movement directions [16,17]. It
remains to be seen how well subjects compensate with
their non-dominant arm in the turn and reach task [18].
Evidence for feedforward processes is apparent also from
studies involving virtual rotation. Subjects who are physically stationary but experiencing illusory whole body
spatial rotation exhibit curved arm movement trajectories
and endpoint errors when reaching towards objects that
are stationary in relation to them [19]. The movement
curvature and endpoint deviation are in the opposite
www.sciencedirect.com
Motor control and learning in altered dynamic environments Lackner and DiZio 655
Figure 1
direction to the Coriolis forces that would be generated if
they were actually rotating, thus reflecting an active
compensatory process. Stiffening of the arm is not a
possible explanation for directional errors in response
to ‘phantom’ Coriolis forces. By contrast, with robotic
perturbations, the initial responses during reaching are a
sudden stiffening of the arm and hand to resist the force of
the manipulandum [20]. With stable perturbations,
repeated movements lead to less stiffening and more
guidance of the ‘tool’ [21], but with unstable robotic
perturbations stiffness remains high [22].
Adaptation of whole body turning
movements
Anticipated torso angular velocity relative to space is one
important determinant of feedforward compensations for
Coriolis forces on arm movements. During natural voluntary turns, torso velocity is predicted accurately and
compensation is near perfect. In a new paradigm, perturbations of natural whole body turning movements have
been achieved using a servo controlled platform (see
Glossary) [23]. The subject standing on the platform
in the dark swivels head and torso (no pointing movements) to face alternately two platform fixed targets. A
fraction of the torso displacement relative to the platform
(which subjects keep virtually constant) is fed with either
positive or negative gain (see Glossary) to the platform
motor. With positive gain, when the subject turns the
platform turns in the same direction by a fraction of the
movement, thus displacing the feet relative to space and
increasing the muscular effort needed to turn the body
relative to the platform because the torso lags behind the
feet owing to its large inertial mass. Using small gain
increments, subjects could be exposed to 0.5 gains
without them sensing the platform move, any change
in effort, or any change in body displacement with respect
to external space, even though it changed by 50%.
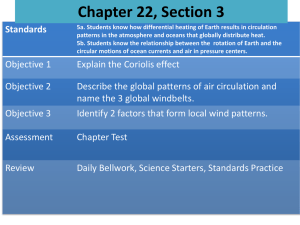
Patterns of adaptation and aftereffects for reaching movements
exposed to non-contacting Coriolis forces and contacting robotic
forces. Filled circles give lateral endpoint errors (plots of movement
curvature are similar) and open circles show magnitude estimates of the
perturbation force scaled to the first perturbation, which was assigned a
value of 10. Coriolis forces were generated by unfettered reaches during
constant velocity rotation, and velocity-dependent robotic forces were
generated by a PHANToM robot. The perturbation exposures (gray
areas) were designed to be as comparable as possible: first, all subjects
were naı̈ve, second, rightward forces with peak magnitudes of 4 N
were generated during forward movements, third, subjects reached from
a single starting location to a single straight-ahead target that
extinguished at movement onset, fourth, all reaches were in complete
darkness, and fifth, individual trials (averaged across subjects) were
plotted using the same horizontal scale. (a) Endpoint errors during
exposure to Coriolis forces and aftereffects are absent within 20
movements. Subjects perceive the Coriolis force when it is first
introduced and an illusory mirror-image force when it is removed, and
the apparent forces decay to zero within 20 reaches in both periods.
(b) Reaching errors decay more slowly during exposure to robotic
dynamic forces than Coriolis forces, but when subjects continue
www.sciencedirect.com
The altered spatial displacement is well above detection
thresholds for the semicircular canals. Consequently,
direct vestibular signals are not determining the apparent
spatial displacement of the body, which appears to be in a
foot centered frame of reference [24], and could be
derived from either proprioceptive signals about footto-torso rotation or canal signals modulated by motor
planning signals [25]. When platform gain is reduced to
zero, subjects show aftereffects by turning their torso too
much after adaptation to positive gain and too little for
negative gains. Subjects who turn and reach when platform gain is returned to zero show large undershoots of
arm movement endpoints (relative to the torso) after
reaching with the de-activated manipulandum return to baseline occurs
at about the same rate as Coriolis re-adaptation. The magnitudes of
apparent forces during and after exposure follow the same patterns as
movement errors. (c) Aftereffects are absent if subjects, after adaptation
to the robot, make free, unfettered reaches.
Current Opinion in Neurobiology 2005, 15:653–659
656 Motor systems
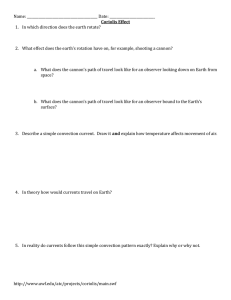
Figure 2
Top views of twelve finger paths when a subject pointed to three
targets while simultaneously turning leftward. The extension of the
hand relative to the torso was approximately the same for all targets,
torso movement amplitude averaged 68, 288 and 588 for the three
targets. Arm extension and torso rotation velocities occurred nearly
simultaneously, so the rightward Coriolis force magnitudes increased
with target eccentricity. Subjects reached with: normal execution speed
(thin, black lines); normal speed, carrying a 450 g mass (thick, black
lines); fast execution speed (thin, red lines); fast execution with the
weight (thick, red lines). Coriolis forces on the arm were about 78%
greater in fast than slow movements, and were about 27% larger
with than without the weight. The nearly perfect overlap of finger
paths shows that variations in Coriolis force due to target
eccentricity, execution speed and grasped load do not affect
movement paths nor endpoints.
adaptation to positive gains, and overshoots for negative
gains. These pointing errors reflect the feedforward compensations for the intended body movements that no
longer match the executed movements.
Spatial goals and adaptation to jaw and limb
perturbations
Robotic manipulanda have been used to create jaw velocity-dependent perturbations while subjects produce particular speech sounds [26]. Subjects show rapid
adaptation under these conditions and then exhibit transient motor aftereffects, just as with limb movement
control, when the perturbation is suddenly removed.
Importantly, subjects trained to make the same jaw movements without making the speech sounds fail to show any
adaptation at all when subjected to velocity-dependent
jaw perturbations. A similar spatial goal dependency has
been found for subjects whose pointing movements to
visual targets are perturbed by a velocity-dependent
robotic force field [27]. Subjects instructed to hit the
target adapt with additional reaches. Those instructed
to point to the target but to maintain a constant effort, that
is, repeat the same movement, fail to show adaptation.
These studies indicate the adaptive mechanisms for
speech and limb motor control are goal and contextdependent.
Current Opinion in Neurobiology 2005, 15:653–659
Consolidation of motor learning
The use of robotic manipulanda to perturb movements
has generated considerable interest in what is being
learned and how it is being learned. Initial studies
reported that as long as learning of a second dynamic
perturbation came at least some minimum time
(5 hours) after learning of the first task, it did not affect
retention of the first, which suggests a period of consolidation after initial learning [28]. Recent studies that
involve a variety of dynamic motor and visuomotor tasks
have failed to show evidence for such a consolidation
process with interference occurring even when learning
periods are separated by a week [29]. It has been suggested that depending on the context, nature and scheduling of tasks that anterograde interference with
retrieval rather than disruption of consolidation might
occur [30,31].
Internal models of motor control
The contexts of self-generated Coriolis force loads and
external robotic loads differ — Coriolis loads are selfgenerated and non-contacting, whereas robotic loads are
external and contacting. The general notion that the
neuromotor system can maintain multiple, long-term,
context-dependent internal models is consistent with
several factors: first, that in everyday life we can engage
and disengage familiar loads without error [32,33], second, computational models of modular adaptation [34–
36], third, functional magnetic resonance imaging (fMRI)
evidence for formation of multiple internal models in the
cerebellum [37]. The existence of multiple internal models is inconsistent with the general failure of robotic
perturbation experiments to demonstrate context-specific
learning of dynamics [38]. However, context-specific
motor learning is typically studied with serially presented
dynamic robotic perturbations. Subjects are exposed to
multiple novel force fields in different contexts [39], or to
one novel force field in one context and the ‘null field’
(which is actually the normal field) in a different context
[40]. For example, when subjects grasping a robotic
manipulandum are presented alternating pairings of a
leftward dynamic perturbation with a red light and a
rightward perturbation with a green light visible, they
fail to adapt to either perturbation [38].
Recently, paradigms and computational models have
been developed to evaluate the effect of a single trial
of a perturbation that differs from the surrounding perturbation sequence [41]. The ‘outlier’ perturbation does
not contribute to a contextually dependent internal
model but alters the current working memory [42]. Outside the laboratory the natural environment contains
multiple forces that act simultaneously, at a scale relevant
to posture and movement. Gravity is constant but our
orientation changes, we lift objects, manipulate active
machines, wear restrictive clothing, move through resistive media, travel in vehicles that impose dynamic forces,
www.sciencedirect.com
Motor control and learning in altered dynamic environments Lackner and DiZio 657
Figure 3
The brain generates separate internal models of different components of the entire load, such as contacting forces (e.g. movable objects,
mechanical devices, support surfaces) and non-contacting external (e.g. gravity) and internal (e.g. Coriolis and inertial) influences. Coriolis forces
might be entirely self-generated due to effects of active torso rotation on arm extension, or be externally generated due to passive rotation or
wielded objects, or be composed of both external and internal components. Self generated Coriolis forces can be recognized by the presence of
errors in limb trajectory and total muscle force relative to an internal forward model and the absence of unexpected contact force and body rotation.
External mechanical loads can be discriminated by contact forces on the surface of the limb and errors in limb trajectory.
and create self-generated interaction torques during
multi-segment voluntary movements. Despite the paucity of laboratory demonstrations of context-specific
learning, the existence of multiple consolidated internal
models seems virtually certain.
Adapting to multiforce perturbations
Portability of robotic devices makes them a valuable and
flexible tool for use in clinical and rehabilitation settings,
where progress is being made with stroke patients [43].
An important unanswered question is whether adaptation
to a robotic device will influence self-calibration of unfettered movements or will be specific to contexts including
contact. One approach to understanding this involves
distinguishing how various kinds of perturbations are
segregated before being stored in a particular area of
working memory [44]. Some categories of forces might
be more natural for the nervous system to segregate than
others. For example, a study of adaptation to a multiforce
environment consisting of velocity-dependent and constant force components applied to the hand by a robotic
manipulandum indicated that the two components are
partitioned and separately represented [45]. This pattern
suggests that static and dynamic components are independently represented akin to separate representations
for gravitational and dynamic aspects of limb movement
control. The KINARM apparatus has been used to
explore whether novel dynamic loads applied to the hand
or to the arm are encoded separately. The findings
indicated a common encoding with similar adaptation
www.sciencedirect.com
rates for loads applied sequentially to the hand or the
arm. By contrast, with opposing force fields applied
sequentially to the hand and arm complete interference
was observed [10]. Segregation and classification of
forces are key aspects of a model we have proposed for
explaining adaptation to mechanical and to inertial perturbations of limb movement trajectory (see Figure 3).
Neurophysiological studies of motor control
Two key physiological studies have addressed aspects of
neuronal coding of movement parameters. One indicates
that separate populations of neurons encode the dynamic
and the postural components of a movement [46], a
finding that directly contradicts the alpha equilibrium
point hypothesis of movement control [3]. The other
reveals that neurons in area M1 participate in a variety
of motor tasks that involve different constraints (e.g.
isometric versus non-isometric) and different force profiles (e.g. ramp versus multiphasic) [47]. The study
shows that M1 activity is correlated with the complex,
time varying hand force vectors these tasks produce.
Together, these studies represent important progress
and highlight the complexity of the physiological underpinnings of motor control.
Conclusions
The study of velocity-dependent inertial and mechanical
perturbations of reaching movements is enhancing understanding of motor learning. Self-generated Coriolis forces
are ubiquitous in everyday behavior and perceptually
Current Opinion in Neurobiology 2005, 15:653–659
658 Motor systems
transparent. The distinction between active self-recalibration and adaptive tool use is important in understanding
differences between adaptation to inertial and mechanical
perturbations. Adaptation requires spatial goals. Initial
views of motor consolidation were overly simple and consolidation represents a key area of future research concentration. An adequate understanding and model of why and
under what circumstances motor adaptation occurs is lacking and necessary. Much of the work on motor behavior
involves a small number of paradigms being intensively
mined. Future progress will be enhanced by new paradigms with direct relevance to natural behavior.
Acknowledgements
Supported by National Institutes of Health grant R01AR48546 and
National Aeronautic and Space Administration (NASA) grants NAG9-1483,
NAG9-1466. We thank Daniel Wolpert for his valuable comments and
suggestions.
References and recommended reading
Papers of particular interest, published within the annual period of
review, have been highlighted as:
of special interest
of outstanding interest
1.
Lackner JR, DiZio P: Gravitational, inertial, and Coriolis force
influences on nystagmus, motion sickness, and perceived
head trajectory. In The Head-Neck Sensory-Motor Symposium.
Edited by Berthoz A, Graf W, Vidal PP. Oxford University Press;
1992:216-222.
2.
Lackner JR, DiZio P: Rapid adaptation to Coriolis force
perturbations of arm trajectory. J Neurophysiol 1994,
72:299-313.
3.
Bizzi E, Accornero N, Chapple N, Hogan N: Arm trajectory
formation in monkeys. Exp Brain Res 1982, 46:139-143.
4.
Feldman AG: Once more for the equilibrium point hypothesis (l
model). J Mot Behav 1986, 18:17-54.
5.
Feldman AG: Functional tuning of the nervous system with
control of movement or maintenance of a steady posture. II.
Controllable parameters of the muscles. Biophysics 1966,
11:565-578.
6.
DiZio P, Lackner JR: Inertial Coriolis force perturbations of arm
and head movements reveal common, non-vestibular
mechanisms. In Multisensory control of posture. Edited by
Mergner T, Hlavacka F. Plenum Press; 1995:331-338.
7.
Shadmehr R, Mussa-Ivaldi FA: Adaptive representation of
dynamics during learning of a motor task. J Neurosci 1994,
14:3208-3224.
8.
Takahashi CD, Scheidt RA, Reinkensmeyer DJ: Impedance
control and internal model formation when reaching in a
randomly varying dynamical environment. J Neurophysiol 2001,
86:1047-1051.
9.
Ghahramani Z, Wolpert DM: Modular decomposition in
visuomotor learning. Nature 1997, 386:392-395.
10. Davidson PR, Wolpert DM, Scott SH, Flanagan JR: Common
encoding of novel dynamic loads applied to the hand and arm.
J Neurosci 2005, 25:5425-5429.
Using a novel robotic device that can perturb individual arm segments,
the authors demonstrate that dynamic loads applied to the hand or to the
segments of the arm are encoded similarly despite different cutaneous
inputs being associated with the separate contact areas. Arm dynamics
independent of cutaneous contact are being represented.
11. Shadmehr R, Brandt J, Corkin S: Time-dependent motor
memory processes in amnesic subjects. J Neurophysiol 1998,
80:1590-1597.
Current Opinion in Neurobiology 2005, 15:653–659
12. Davidson PR, Wolpert DM: Scaling down motor memories:
de-adaptation after motor learning. Neurosci Lett 2004,
370:102-107.
This study compares the rates of return to baseline reaching trajectories
when, following adaptation to a robotic force field subjects are then
exposed to a null field (de-activated robot), a scaled down version of the
learned field, or a field in a novel direction. De-adaptation was quicker than
adaptation to the scaled down field, which were both quicker than adapting
to the novel direction. This evidence that we can scale down a learned
compensation in certain situations rather than replace it with a new compensation helps to explain the ability to compensate for multiple contexts.
13. DiZio P, Frucht C, Lackner JR: Adaptation to a robotic force field
does not transfer to free arm movements [abstract].
Soc Neurosci Abstr 2005, Prog No 989.6.
14. Pigeon P, Bortolami SB, DiZio P, Lackner JR: Coordinated
turn and reach movements. I. Anticipatory compensation for
self-generated Coriolis and interaction torques. J Neurophysiol
2003, 89:276-289.
15. Conditt MA, Gandolfo F, Mussa-Ivaldi FA: The motor system
does not learn the dynamics of the arm by rote memorization
of past experience. J Neurophysiol 1997, 78:554-560.
16. Sainburg RL, Ghez C, Kalakanis D: Intersegmental dynamics
are controlled by sequential anticipatory, error correction,
and postural mechanisms. J Neurophysiol 1999,
81:1045-1056.
17. Jansen-Osmann P, Richter S, Konczak J, Kalveram KT: Force
adaptation transfers to untrained workspace regions in
children: evidence for developing inverse dynamic motor
models. Exp Brain Res 2002, 143:212-220.
18. Bagesteiro LB, Sainburg RL: Nondominant arm advantages
in load compensation during rapid elbow joint movements.
J Neurophysiol 2003, 90:1503-1513.
19. Cohn J, DiZio P, Lackner JR: Reaching during virtual rotation:
Context-specific compensation for expected Coriolis forces.
J Neurophysiol 2000, 83:3230-3240.
20. Wang T, Dordevic GS, Shadmehr R: Learning the dynamics of
reaching movements results in the modification of arm
impedance and long-latency perturbation responses.
Biol Cybern 2001, 85:437-448.
21. Hinder MR, Milner TE: Novel strategies in feedforward
adaptation to a position-dependent perturbation. Exp Brain
Res 2005, 165:239-249.
22. Burdet E, Osu R, Franklin DW, Milner TE, Kawato M: The central
nervous system stabilizes unstable dynamics by learning
optimal impedance. Nature 2001, 414:446-449.
23. Hudson T, Lackner JR, DiZio P: Rapid motor adaptation of torso
pointing movements to perturbations of the base of support.
Exp Brain Res 2005, 165:283-293.
The authors introduce a novel paradigm utilizing a servo-controlled
platform for distorting the relationship between a subject’s voluntary
effort and body displacement relative to space. Rapid remappings occur.
The results show that the sense of body displacement is represented in a
foot-based rather than a vestibular reference system.
24. Mergner T, Maurer C, Peterka RJ: A multisensory posture
control model of human upright stance. Prog Brain Res 2003,
142:189-201.
25. Roy JE, Cullen KE: Vestibuloocular reflex signal modulation
during voluntary and passive head movements. J Neurosci
2002, 87:2337-2357.
26. Tremblay S, Shiller DM, Ostry DJ: Somatosensory basis of
speech production. Nature 2003, 423:866-869.
27. Kurtzer I, DiZio P, Lackner JR: Task-dependent motor learning.
Exp Brain Res 2003, 153:128-132.
28. Brashers Krug T, Shadmehr R, Bizzi E: Consolidation in human
motor memory. Nature 1996, 382:252-255.
29. Caithness G, Osu R, Bays P, Chase H, Klassen J, Kawato M,
Wolpert DM, Flanagan JR: Failure to consolidate the
consolidation theory of learning for sensorimotor adaptation
tasks. J Neurosci 2004, 24:8662-8671.
www.sciencedirect.com
Motor control and learning in altered dynamic environments Lackner and DiZio 659
30. Miall RC, Jenkinson N, Kulkarni K: Adaptation to rotated visual
feedback: a re-examination of motor interference. Exp Brain
Res 2004, 154:201-210.
31. Krakauer JW, Ghez C, Ghilardi MF: Adaptation to visuomotor
transformations: consolidation, interference, and forgetting.
J Neurosci 2005, 25:473-478.
32. Atkeson CG, Hollerbach JM: Kinematic features of unrestrained
vertical arm movements. J Neurosci 1985, 5:2318-2330.
33. Bock O: Load compensation in human goal-directed arm
movements. Behav Brain Res 1990, 41:167-177.
34. Haruno M, Wolpert DM, Kawato M: Mosaic model for
sensorimotor learning and control. Neural Comput 2001,
13:2201-2220.
35. Wolpert DM, Kawato M: Multiple paired forward and
inverse models for motor control. Neural Netw 1998,
11:1317-1329.
36. Wolpert DM, Doya K, Kawato M: A unifying computational
framework for motor control and social interaction. Philos
Trans R Soc Lond B Biol Sci 2003, 358:593-602.
37. Imamizu H, Kuroda T, Yoshioka T, Kawato M: Functional
magnetic resonance imaging examination of two modular
architectures for switching multiple internal models.
J Neurosci 2004, 24:1173-1181.
38. Karniel A, Mussa-Ivaldi FA: Does the motor control system use
multiple models and context switching to cope with a variable
environment? Exp Brain Res 2002, 143:520-524.
39. Conditt MA, Mussa-Ivaldi FA: Central representation of time
during motor learning. Proc Natl Acad Sci USA 1999,
96:11625-11630.
40. Scheidt RA, Dingwell JB, Mussa-Ivaldi FA: Learning to move
amid uncertainty. J Neurophysiol 2001, 86:971-985.
41. Donchin O, Francis JT, Shadmehr R: Quantifying generalization
from trial-by-trial behavior of adaptive systems that learn with
www.sciencedirect.com
basis functions: Theory and experiments in human motor
control. J Neurosci 2003, 23:9032-9045.
42. Wainscott SK, Donchin O, Shadmehr R: Internal models and
contextual cues: encoding serial order and direction of
movement. J Neurophysiol 2004, 93:786-800.
43. Volpe BT, Krebs HI, Hogan N: Is robot-aided sensorimotor
training in stroke rehabilitation a realistic option?
Curr Opin Neurol 2001, 14:745-752.
44. Flanagan JR, Nakano E, Imamizu H, Osu R, Yoshioka T, Kawato M:
Composition and decomposition of internal models in motor
learning under altered kinematic and dynamic environments.
J Neurosci 1999, 19:RC34.
45. Kurtzer I, DiZio P, Lackner JR: Adaptation to a novel multi-force
perturbation. Exp Brain Res 2005, 164:120-132.
The authors report a key demonstration that adaptation to a compound
force field with simultaneous static and velocity-dependent components
involves identification and individual representations of the two components.
46. Kurtzer I, Herter TM, Scott SH: Random change in cortical load
representation suggests distinct control of posture and
movement. Nature Neurosci 2005, 8:498-504.
A key issue in motor control is whether posture and movement are
separately or conjointly represented. This paper points to distinct
neuronal representations.
47. Sergio LE, Hamel-Paquet C, Kalaska JF: Motor cortex neural
correlates of output kinematics and kinetics during isometricforce and arm-reaching tasks. J Neurophysiol 2005,
94:2353-2378.
A seminal paper concerning the neuronal representation in area M1 of
kinematic and kinetic features of isometric and non-isometric movements. Previous work has indicated coding of simple force patterns,
and this study demonstrates it for more complex force patterns arising in
different types of naturalistic movements.
48. Scott SH: Apparatus for measuring and perturbing shoulder
and elbow joint positions and torques during reaching.
J Neurosci Methods 1999, 89:119-127.
Current Opinion in Neurobiology 2005, 15:653–659