Document 14544850
advertisement

The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
A Numerical Method for Dynamic
Response Analysis of Structure
Subjected to Relative Displacement
between Support Points
Tomohiro Nakano*
*Associate Professor, Department of Civil Engineering, Tokai University, Hiratsuka, Kanagawa, JAPAN.
E-Mail: tom_nakano{at}tokai-u{dot}jp
Abstract—An equation of motion for structure under both inertial force and the relative displacement between
its support points was formulated, and a numerical method for applying the equation to non-linear dynamic
response analysis was developed. Using the formulation and the method, the author simulated the dynamic
responses of 2 elastic structures and that of an inelastic structure subjected to both the inertial force and the
relative displacement between support points, to prove the method can evaluate the effect of the inertial force.
In addition, the non-linear responses of the inelastic structure under some pairs of relative displacement waves,
with/without the consideration of inertial force, were carried out to evaluate the influence of the inertial force.
As a result of the analyses, the method could represent both the effect of inertial force and that of the relative
displacement. It was also shown that the effect of inertial force is of great importance for evaluating the
damage of structure caused by dynamic relative displacement of its support points.
Keywords—Equation of Motion; Inertial Force; Non-Linear Dynamic Response Analysis; Relative
Displacement; Time History Response of Curvature.
Abbreviations—Equation of Motion (EOM).
I.
T
INTRODUCTION
HE development of computer science over the last few
decades has contributed extremely to various
engineering fields. It is difficult to carry out
experiments using real civil structures, since they are
generally pretty huge; therefore we have predicted the
behaviour of civil structures by the use of mathematical and
dynamical methods. To apply the methods, computational
mechanics is essential to achieve the prediction.
In solving the time-dependent problems, the Newmark
method have been applied to solve a system of linear ordinary
differential equations of second order in time. The progress
in computer science has made it possible to apply the method
to various problems, such as moving load problem [Eftekhari
& Khani, 2010] and dynamical contact problem [Deuflhard et
al., 2008]. This fact indicates that the Newmark method has
the potential to solve a variety of vibration problems.
In fact, several computer algorithms have elucidated
structural response under seismic loads. Furthermore, the
explication of the earthquake ground motions in the
epicentral region, including fault movements are elucidated,
also [Hori, 2007; Campbell et al., 2009]. Nevertheless, the
ISSN: 2321-2403
way to predict the interaction between the structural
behaviour, which is supported by plural points (e.g., bridges)
and the fault movements, has not been clarified so far. In
other words, at present, there is no way to predict the
dynamic behaviour of the structure supported by plural
points, which move with relative displacement, because
existent computer algorithms can deal only with the effect of
the inertial force, or only with the statically relative
displacement. To the author’s best knowledge, the only
attempt to represent the interaction between the inertial force
and the relative displacement was made by Otsuka et al.,
(2007). Their method was to introduce stiff springs between
fixed points and support points, that is, an indirect method
using existing algorithm. Therefore, the interaction will be
able to be represented by the development of the new
computer algorithm, which can consider both the effect of
inertial force and that of relative displacement.
The motivation of this research are that: a) the behaviour
of structures, considering the inertial force and the relative
displacement between support points, should be represented
by a direct method, and b) it is important to investigate the
effect of the interaction between the inertial force and the
relative displacement between support points.
© 2014 | Published by The Standard International Journals (The SIJ)
36
The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
For that reason, the objectives of this research are to: a)
formulate the Equation Of Motion (EOM) considering the
inertial force and the relative displacement between support
points, b) provide a computer algorithm for non-linear
dynamic response analysis using the EOM, and c) show the
applicability of the direct method to linear and non-linear
dynamic response analyses.
The author developed an algorithm, which is composed
of a static analysis part and a dynamic one. The algorithm
also makes it possible to calculate the structural behaviour
even in the non-linear range. Though the application of the
method to some real structures had already been showed in
some papers [Nakano & Ohta, 2008; Nakano, 2013], the
analyses focused only on the non-linear phenomena of bridge
structures. However, this method can be applied not only to
non-linear structures but also to the fields concerning elastic
vibration problems of parts or components to evaluate the
effect of the inertial force (e.g., mechanical or electrical
engineering).
The contributions of this paper are: a) establishment of a
direct method to solve a vibration problem considering the
inertial force and the relative displacement between support
points, b) achievement of the application of the method to
some problems, and c) presentation of non-linear time-history
phenomena for the purpose to show the interaction between
the inertial force and the dynamic relative displacement.
II.
THE EQUATION OF MOTION WITH
RELATIVE DISPLACEMENT
2.1. The Equation of Motion for Elastic Structure with
Relative Displacement
Let us consider a finite element model of a structure
composed of some elements (black solid line in figure 1)
[Nakano & Ohta, 2008; Nakano, 2013]. In the absolute
coordinates, the Equation Of Motion (EOM) for the structure
without the damping effect can be expressed as follows.
(1)
𝑀𝑢 + 𝐾𝑢 = 𝐹
uS1
uA
uS0
uB
Figure 1: Division of Displacement Vector
Here, 𝑀 is the mass matrix, 𝐾 the stiffness matrix, u the
absolute displacement vector and 𝐹 the external force vector.
We now divide these matrices and vectors as
𝐾𝑠𝑠 𝐾𝑆𝐴 𝐾𝑆𝐵
𝑀𝑠 0
0
(2)
𝑀 = 0 𝑀𝐴 0
𝐾 = 𝐾𝐴𝑆 𝐾𝐴𝐴 𝐾𝐴𝐵
𝐾𝐵𝑆 𝐾𝐵𝐴 𝐾𝐵𝐵
0
0 𝑀𝐵
ISSN: 2321-2403
𝑢𝑠
𝐹𝑠
𝑢 = 𝑢𝐴
𝐹 = 𝐹𝐴
𝑢𝐵
𝐹𝐵
Here, the subscripts 𝐴, 𝐵 of the components in the
matrices or the vectors denote the degrees of freedoms
corresponding to the support points 𝐴, 𝐵 (displacement
controlled points) and 𝑆 the degree of freedoms of other
points (load controlled points).
Next, we consider the condition when the support points
𝐴, 𝐵 displace 𝑢𝐴 and 𝑢𝐵 statically. The stiffness equation
under the condition can be written as;
𝐾𝑠𝑠 𝐾𝑆𝐴 𝐾𝑆𝐵 𝑢𝑠0
𝐹𝑠0
𝐾𝐴𝑆 𝐾𝐴𝐴 𝐾𝐴𝐵 𝑢𝐴 = 𝐹𝐴
(3)
𝐾𝐵𝑆 𝐾𝐵𝐴 𝐾𝐵𝐵 𝑢𝐵
𝐹𝐵
In Eq.(3), 𝑢𝑠0 denotes the displacement vector of the
load controlled points, 𝐹𝑠0 the static load vector such as dead
loads, 𝐹𝐴 and 𝐹𝐵 are the reaction force vectors caused by the
displacements 𝑢𝐴 and 𝑢𝐵 .
From the first row of Eq.(3), we have
(4)
𝐾𝑠𝑠 𝑢𝑠0 + 𝐾𝑆𝐴 𝑢𝐴 + 𝐾𝑆𝐵 𝑢𝐵 = 𝐹𝑆0
Then, we introduce the 𝑢𝑠1 , which is the displacement
vector caused by the inertial force (i.e., dynamic effects) at
the load controlled points (Figure 1). The relation among 𝑢𝑠0 ,
𝑢𝑠1 and the total displacement vector 𝑢𝑠 should be
(5)
𝑢𝑠 = 𝑢𝑠0 + 𝑢𝑠1
The load vector 𝐹𝑠 in Eq.(1) is just the same as 𝐹𝑠0 , that
is, 𝐹𝑠 = 𝐹𝑠0 . Considering these relations, Eq.(1) yields
𝑀𝑠 𝑢𝑠0 + 𝑢𝑠1 + 𝐾𝑠𝑠 𝑢𝑠0 + 𝑢𝑠1 + 𝐾𝑆𝐴 𝑢𝐴 + 𝐾𝑆𝐵 𝑢𝐵
(6)
= 𝐹𝑆0
Substituting Eq.(4) into Eq.(6), we have
(7)
𝑀𝑠 𝑢𝑆1 + 𝐾𝑆𝑆 𝑢𝑆1 = −𝑀𝑆 𝑢𝑆0
In the case that the structure is elastic, there exists the
inverse of 𝐾𝑠𝑠 . Therefore, Eq.(4) can be rewritten as follows.
−1
(8)
𝑢𝑠0 = 𝐾𝑆𝑆
𝐹𝑆0 − 𝐾𝑆𝐴 𝑢𝐴 − 𝐾𝑆𝐵 𝑢𝐵
Using Eq.(8), we express the Eq.(7) as
−1
(9)
𝑀𝑠 𝑢𝑆1 + 𝐾𝑆𝑆 𝑢𝑆1 = 𝑀𝑆 𝐾𝑆𝑆
𝐾𝑆𝐴 𝑢𝐴 + 𝐾𝑆𝐵 𝑢𝐵
Eq.(9) indicates that when we have the acceleration
record of the support points A and B in advance, we can
predict the dynamic response considering both the inertial
force and the relative displacement of the support points.
One of the important points when applying this equation
to dynamic analysis is that 𝑢𝑠1 and 𝑢𝑠1 are the “relative”
displacement and the “relative” acceleration. Therefore, when
we evaluate the absolute displacement and the absolute
acceleration, we have to use the relations
(10)
𝑢𝑆 = 𝑢𝑆0 + 𝑢𝑆1
(11)
𝑢𝑠 = 𝑢𝑆0 + 𝑢𝑠1
2.2. Incremental Form of the Equation of Motion
To simulate the structure in non-linear range, we have to use
the incremental form of the EOM. The incremental form of
Eq.(9) can be expressed as
𝑡
𝑡 −1
𝑡
𝑡
(12)
𝑀𝑠 ∆𝑢𝑆1 + 𝐾𝑆𝑆
∆𝑢𝑆1 = 𝑀𝑆 𝐾𝑆𝑆
𝐾𝑆𝐴
∆𝑢𝐴 + 𝐾𝑆𝐵
∆ 𝑢𝐵
Here, the notation of 𝑡 means the tangent stiffness
matrix.
© 2014 | Published by The Standard International Journals (The SIJ)
37
The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
However, the right hand side in Eq.(12), which is the
external force vector, cannot be determined as a constant
vector, because the tangent stiffness matrix varies during the
non-linear analysis. This fact will make it difficult to solve
the equation.
Accordingly, we use the incremental form of Eq.(7)
instead of Eq.(12) to carry out the non-linear analysis. The
incremental form of Eq.(7) is
𝑡
(13)
𝑀𝑠 ∆𝑢𝑆1 + 𝐾𝑆𝑆
∆𝑢𝑆1 = −𝑀𝑆 ∆𝑢𝑆0
In this equation, ∆𝑢𝑆0 is the increment of the second
order differential of 𝑢𝑆0 , which can be obtained by solving
Eq.(3). In the time history response analysis, we can
determine the ∆𝑢𝑆0 using the 𝑢𝑆0 in previous step and the 𝑢𝑆0
before the previous step. Using Eq.(13), we can calculate the
response of the inertial force and relative displacements, even
though the structure is in the non-linear range.
To apply Eq.(13), we have to use a special algorithm,
which is composed of a static analysis part and a dynamic
one. The algorithm of the time history response analysis can
be found in figure 2.
TIME INCREMENT LOOP : n
u A u An u An 1 , u B u Bn u Bn 1
STATE DETERMINATION BY STATIC ANALYSIS
Enter Newton-Raphson iteration loop : k=1,2,3, ... until convergence
FS0
t
Solve FA 0 K
F
B0
u S0
u A
u
B
u S0 u S0 u S0
Assemble structure resisting force vector FR 0
Compute unbalanced force vector FU F0 FR 0
Goto next Newton-Raphson iteration
CALCULATE
u S0 , u S0 AND P M S u S0
STATE DETERMINATION BY DYNAMIC ANALYSIS
Enter Newton-Raphson iteration loop : k=1,2,3, ... until convergence
K K SSt
1
1
C SS
MS
2t
t 2
1 n 1 1
1 n 1 1 n 1
P M S u S0 M S
u S0
u S0 C SS
u S0
1u Sn01 t
2
t
4
2
u S1 K 1 P
u S1 u S1 u S1
Solve u S1 and u S1 by Newmark method and updateu S1 and u S1
Assemble structure resisting force PR
PRD M S u S1 C S u S1 PR
Compute unbalanced force vector PU P PRD
Goto next Newton-Raphson iteration
GOTO NEXT TIME STEP
Figure 2: Integration Procedure of Dynamic Analysis
ISSN: 2321-2403
© 2014 | Published by The Standard International Journals (The SIJ)
38
The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
5.0 [m]
3.0 [m]
4.0 [m]
Beam - A
3.0 [m]
Beam - B
Figure 3: Example Simple Beams
0
-0.1
0
5
10
15
Time [sec]
Wave 1 (A=0.05m)
20
0.1
0
-0.1
0
5
10
15
Time [sec]
Wave 3 (A= -0.05m)
20
Displacement [m]
0.1
Displacement [m]
Displacement [m]
Displacement [m]
Then, we input the vertical displacement waves at both
support points. The vertical displacement waves are as
follows.
𝐴
𝐴
− 𝑐𝑜𝑠𝜋𝑡 + (0 ≤ 𝑡 < 1.0)
(14)
𝑢0 𝑡 =
2
2
𝐴𝑐𝑜𝑠𝜋 𝑡 − 1.0 1.0 ≤ 𝑡 ≤ 21.0
Here, the 𝑢0 (𝑡) has the period of T=2.0[s]. Now, 4
displacement waves are prepared. Figure 4 shows the
amplitude and the wave form of each wave.
0.1
0
-0.1
0
5
10
15
Time [sec]
Wave 2 (A=0.075m)
20
0
5
20
0.1
0
-0.1
10
15
Time [sec]
Wave 4 (A= -0.075m)
Figure 4: Prepared Displacement Waves
To investigate the dynamic responses of the beams, we
apply some pairs of these waves at the support points.
ISSN: 2321-2403
t = 10.5[s]
0
-0.1
0
5
10
0.1
0
t = 11.0[s]
-0.1
0
5
10
0.1
0
t = 11.5[s]
-0.1
0
5
10
0.1
t = 12.0[s]
0
-0.1
0
5
10
Displacement [m]
0.1
Wave 1
Displacement [m]
300 [ton]
Wave 1
Displacement [m]
5.0 [m]
300 [ton]
Wave 1
1000 [ton]
Displacement [m]
1000 [ton]
1000 [ton]
Displacement [m]
This study is concerned with the EOM for elastic structure
under relative displacement and its application to the nonlinear analysis. This chapter presents some examples of the
elastic beams under dynamic relative displacement at their
support points, obtained by the EOM suggested in this study.
Now, we consider two simple beams with length of 10m
as shown in Figure 3. Both beams have the elastic modulus of
E=200[GPa], the sectional area of A=0.01[m2], the moment
of inertia of I=3.0×10-6[m4] and the mass of unit length of
0.05[ton/m]. One has a mass of 1000[ton] at the centre
(Beam-A), the other two masses of 300ton at 3m from both
ends (Beam-B).
3.2. Dynamic Response of the Beam under the Couple of
Waves of the Same Phase
Displacement [m]
3.1. Target Structure and Applied Displacement Waves
Incidentally, the reason why the beams hold the
unrealistic mass is to make it possible to visualize the
deformation of the beams. In addition to this, for
simplification, the effect of gravity is neglected purposely.
Displacement [m]
DYNAMIC RESPONSE ANALYSIS OF
ELASTIC BEAMS UNDER INERTIAL
FORCE AND RELATIVE DISPLACEMENT
Displacement [m]
III.
Wave 2
0.1
t = 10.5[s]
0
-0.1
0
5
0
5
0
5
10
0.1
0
t = 11.0[s]
-0.1
10
0.1
0
t = 11.5[s]
-0.1
10
0.1
t = 12.0[s]
0
-0.1
0
5
10
Figure 5 (Left: a, Right: b): The Deformation of Beam-A under the
Couple of Waves of Same Phase at the time of t=10.5, 11.0, 11.5
and 12.0[s]
According to Figure 5-a, though both ends move
between -5cm and +5cm, the centre of the beam is displaced
just a little (0.5cm). The reason is that the stationary large
mass has the tendency to stay in its original location, and that
the large mass in motion tends to keep moving in the same
direction.
Figure 5-b shows the deformation of Beam-A under the
pair of waves of the coordinate phase, however the waves
have different amplitudes to each other. Though the figure 5a can be obtained by the general EOM, the general EOM
cannot deal with the problem as figure 5-b. However, the
EOM suggested in this study makes it possible to represent
the result considering both the inertial force and the relative
displacement. In fact, figure 5-b indicates similar deformation
forms as figure 5-a, which include the effect of inertial forces.
3.3. Dynamic Response of the Beam under the Couple of
Waves of Opposite Phase
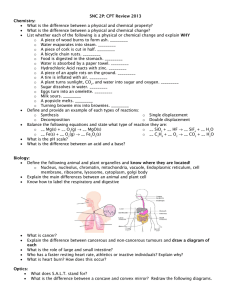
Figure 6 shows the deformation of Beam-B under the couple
of waves of the opposite phase. Because the static analysis
shows that the beam centre (i.e., at the 1000ton mass of
Beam-A) keeps the same location in this case, the Beam-B is
adapted to investigate the effect of the inertial force.
© 2014 | Published by The Standard International Journals (The SIJ)
39
The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
300 [ton]
0
-0.1
0
5
10
0.1
0
t = 11.5[s]
-0.1
0
5
10
0.1
0
t = 12.0[s]
-0.1
0
5
10
2.6
0
5
10
0.1
4.0
t = 11.0[s]
4.0
0
-0.1
0
5
10
Y (UD)
0
0
5
10
0.1
This bridge was divided into 92 elements and idealized
as 93 degree of freedoms lumped-mass system (figure 8). In
the non-linear analysis, the constitutive relation proposed by
Maekawa & Tsuchiya (2002) was used for concrete, the ones
for reinforcing bars and PCs were the bilinear model.
0
20
t = 12.0[s]
-0.1
0
5
10
Figure 6-a shows the deformation of Beam-B under the
pair of Wave 1 and Wave 3 at the times of t=10.5 , 11.0 , 11.5
and 12.0[s]. The result indicates that the inertial force effect
at the large mass was represented clearly. The static analysis
gives us only the line-shaped deformation of the beam, but
the EOM mentioned above shows the inertial force forms the
S (or reverse-S) shaped deformation.
Besides, the similar deformation of the beam can be seen
when the Beam-B is under the couple of Wave 1 and Wave 4,
in this case the waves having different amplitudes (figure 6b). The figure also indicates that the displacement response is
affected by the inertial force, which cannot be represented by
the static analysis.
APPLICATION OF EQUATION OF MOTION
WITH DYNAMIC RELATIVE
DISPLACEMENT TO NON-LINEAR
ANALYSIS
10
01
18
48
0
01
-10
79
-40
0
50
100
Black : Node
Red : Element
93 92
79 78
150
200
Figure 8: Beam Element Model of the Target Bridge
Next, we integrate an observed acceleration record (921
Chi-Chi Earthquake at TCU068 in Taiwan, 1999 [Taiwan
Central Weather Bureau, 2014]) with respect to time twice. In
the integration, the methods proposed by Iwan et al., (1985),
Boore (2001) and Akkar & Boore (2009) were applied to
modify the baseline, and two waves with different residual
displacements were obtained. The displacement waves are
shown in figure 9.
4
TCU068-UD
0
TCU068-EW(1)
-4
TCU068-EW(2)
-8
0
Existing structures show non-linear response when they are
under large relative deformations or large inertial forces.
Therefore, this study illustrate an algorithm to obtain the
numerical solutions of the structures under dynamic relative
displacement. This chapter presents an application of the
algorithm to non-linear analysis of a structure [Deuflhard et
al., 2008].
Figure 7 shows a bridge structure which is analyzed to
evaluate damage due to both relative displacement and
inertial force. The bridge was designed based on Japan
64
65
-20
-30
65
80
66
10
20
30
4.1. Target Structure and Applied Displacement Waves
ISSN: 2321-2403
unit in [m]
14.0
Figure 7: Target Rahmen Bridge
t = 11.5[s]
-0.1
X (EW)
14.0
0.1
Figure 6 (Left: a, Right: b): The Deformation of Beam-B under the
Couple of Waves of Opposite Phase at the time of t=10.5, 11.0, 11.5
and 12.0[s]
IV.
30.0
t = 11.0[s]
-0.1
3.5
0.1
62.5
0
4.5
10
225.0
100.0
62.5
2.6
5
t = 10.5[s]
30.0
0
0.1
3.5
-0.1
Wave 4
Design Specifications for Highway Bridges. The details of
the bridge can be found in [Japan Road Association, 2002;
2002A].
4.5
0
Displacement [m]
t = 10.5[s]
Displacement [m]
0.1
300 [ton]
Wave 1
Displacement [m]
Wave 3
Displacement [m]
Displacement [m]
Displacement [m]
Displacement [m]
Displacement [m]
Wave 1
300 [ton]
Displacement [m]
300 [ton]
40
50
Time [sec]
60
70
80
90
Figure 9: Displacement Wave obtained from the Ground
Acceleration Record
To analyze the bridge response, the 2 waves (TCU068EW(1) and (2)) are input to the support points in X (EW)
direction. The TCU068-UD is also input in Y(UD) direction
at the same time. The combination of waves are shown in
table 1. The analytical case DRo represents the effect of the
inertial force and the relative displacement when the distance
between two support points becomes widened.
© 2014 | Published by The Standard International Journals (The SIJ)
40
The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
Y
Widen
Y
Y
Narrow
N
Y
Widen
Narrow
The case DRc represents the effect of them when the
distance between two support points becomes narrowed. The
case SRo and SRc are the ones when the effects of inertial
force were neglected, that is, the results of static analysis.
4.2. Analytical Results and Discussions
Figure 10 shows the deformations of analytical cases DRo,
DRc, SRo and SRc of the bridge at the time of 90[s]. The
circles and numbers mean the failure elements and their
element number.
07
25
78
0
10
0
-10
-20
-30
50
58
92
100
150
07
200
58
78
0
case DRo
50
92
100
150
10
0
-10
-20
-30
case SRo
200
10
37
78
0
10
0
-10
-20
-30
50
10
92
100
50
200
55
92
100
case DRc
150
33
78
0
55
150
case SRc
0
20
40
60
Time [sec]
80
SRo
0
-0.01
0
20
40
60
Time [sec]
80
0.01
0
DRo
elm58
07
58
25
-0.01
SRo
-0.02
-0.03
78
0
20
40
60
Time [sec]
0.03
elm92
0.02
SRo
0.01
0
-0.01
DRo
0
20
40
60
Time [sec]
92
80
80
0.01
0
SRo
elm78
-0.01
-0.02
-0.03
DRo
0
20
40
60
Time [sec]
80
Figure 11: Time History Curvature Response of DRo and SRo
Figure 12 shows the time history curvature response of
DRc and SRc, i.e., the case when the distance between 2
support points becomes narrowed. From the figure, in
element 10, 55, 78 and 92, the curvature responses of DRc
differ from that of SRc. In the principle span, the locations of
plastic hinges aren’t the same. This fact indicates that the
inertial force has a possibility to vary the damage state of the
structure.
200
Figure 10: Deformations and Plastic Hinge Locations of the Bridge
at the time of t=90[s]
In comparison the case DRo (dynamic analysis with
relative displacement: OPEN) with the case SRo (Static
analysis considering only relative displacement: OPEN), the
deformation of the bridge looks similar to each other. In
addition, the plastic hinge locations are the same except in the
principal span.
On the other hand, in comparison the case DRc (dynamic
analysis with relative displacement: CLOSE) with the case
SRc (Static analysis considering only relative displacement:
CLOSE), the deformation of the bridge is different from each
other.
For a bridge structure, it is important to estimate its
deformation and curvatures of plastic hinges which are the
governing factor of the deformation [Chen & Lui, 2006].
Figure11 shows the time history curvature response of
DRo and SRo, i.e., in the case when the distance between 2
support points becomes widened. All the plastic hinges in
case DRo generate double or half the curvature; 3 of 5 plastic
hinges of case DRo generate twice curvature as that of case
SRo. Besides, in the case DRo, the curvature responses are
vibrated by the inertial force (30-50s).
These results indicate that the inertial force affects the
structural behaviour greatly.
ISSN: 2321-2403
DRo
0.01
0.03
0.02
SRc
Curvature [1/m]
10
0
-10
-20
-30
SRo
-0.02
DRo elm25
0.02
elm10
0.01
DRc
0
-0.01
0
20
40
60
Time [sec]
elm37
SRc
-0.01
-0.02
-0.03
DRc
0
20
40
60
Time [sec]
80
0.03
elm78
0.02
0.01
SRc
0
DRc
-0.01
0
20
40
60
Time [sec]
DRc elm33
-0.04
SRc
-0.06
0
0.01
0
0
-0.02
80
Curvature [1/m]
Y
-0.01
0.03
Curvature [1/m]
N
elm07
0
-0.03
Curvature [1/m]
Y
0.01
Curvature [1/m]
Condition
Curvature [1/m]
SRc
TCU068EW(1)
TCU068EW(2)
TCU068EW(1)
TCU068EW(2)
Disp.
Curvature [1/m]
SRo
TCU068EW(2)
TCU068EW(1)
TCU068EW(2)
TCU068EW(1)
Acc.
Curvature [1/m]
DRc
Right Pier
Curvature [1/m]
DRo
Left Pier
Curvature [1/m]
Case
Curvature [1/m]
Table 1: Analytical Cases
80
78
40
60
Time [sec]
80
0.03
DRc elm55
0.02
SRc
0.01
0
-0.01
0
20
40
60
Time [sec]
80
0.01
elm92
0
SRc
-0.01
DRc
-0.02
-0.03
0
33 37
10
20
20
40
60
Time [sec]
80
55
92
Figure 12: Time History Curvature Response of DRc and SRc
To sum up, it was shown that the effect of the inertial
force cannot be negligible, analytically. The proposed
algorithm, which can consider both the relative displacement
and the inertial force, would be a useful tool to evaluate the
effect of the inertial force.
© 2014 | Published by The Standard International Journals (The SIJ)
41
The SIJ Transactions on Computer Networks & Communication Engineering (CNCE), Vol. 2, No. 3, May 2014
V.
CONCLUSION
An equation of motion for structure under the dynamic
relative displacement was formulated and a numerical
method to solve the equation was developed in this study.
Further, some dynamic response analyses were carried out.
From the result of elastic analysis using the method, a
significant effect of inertial force was indicated, which cannot
be represented by the static analysis. In addition, from the
non-linear analysis using the method, it was shown that the
effect of inertial force is of great importance for evaluating
the damage of structure caused by dynamic relative
displacement of its support points.
Hence, there seems to be some cases that we should
consider not only relative displacement or only inertial force
but also the interaction of relative displacement and inertial
force to estimate the damage of structures.
[10]
[11]
[12]
[13]
[14]
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
W.D. Iwan, M.A. Moser & C.Y. Peng (1985), “Some
Observations on Strong-Motion Earthquake Measurement
using a Digital Accelerograph”, Bulletin of the Seismological
Society of America, Vol. 75, Pp. 1225–1246.
D.M. Boore (2001), “Effect of Baseline Corrections on
Displacements and Response Spectra for Several Recordings of
the 1999 Chi-Chi, Taiwan, Earthquake”, Bulletin of the
Seismological Society of America, Vol. 91, Pp. 1199–1211.
Japan Road Association (2002), “Specifications for Highway
Bridges: Part V Seismic Design”, Japan Road Association,
Japan.
Japan Road Association (2002A), “Specifications for Highway
Bridges: Part I COMMON”, Japan Road Association, Japan.
K. Maekawa & S. Tsuchiya (2002), “Nonlinear Analysis based
Verification of Structural Seismic Performance for Practice”,
Proceedings of Fib Congress (Osaka), Session 6, 1-16a.
W.F. Chen & E.M. Lui (2006), “Earthquake Engineering for
Structural Design”, Taylor & Francis, USA, Pp. (4-1)–(4-55).
H. Otsuka, A. Furukawa & T. Nakamura (2007), “Dynamic
Analysis of Cable-Stayed Bridge under Fault Movement”,
JSCE Journal of Earthquake Engineering, Vol. 29, Pp. 450–
457 (in Japanese).
M. Hori (2007), “Introduction to Computational Earthquake”,
Imperial College Press, UK, Pp. 121–193.
T. Nakano & Y. Ohta (2008), “Non-Linear Dynamic Response
Analysis of Bridge Crossing Earthquake Fault Rupture Plane”,
The 14th World Conference on Earthquake Engineering, 05020127(DVD).
ISSN: 2321-2403
[15]
P. Deuflhard, R. Krause & S. Ertel (2008), “A ConstantStabilized Newmark Method for dynamical Contact Problems”,
International Journal for Numerical Methods in Engineering,
Vol. 73, No. 9, Pp. 1274–1290.
S. Akkar & D.M. Boore (2009), “On Baseline Corrections and
Uncertainly in Response Spectra for Baseline Variations
Commonly Encountered in Digital Accelerograph Records”,
Bulletin of the Seismological Society of America, Vol. 99, Pp.
1671–1690.
K. Campbell, N. Abrahamson, M. Power, B. Chiou, Y.
Bozorgnia, T. Shantz & C. Roblee (2009), “Next Generation
Attention (NGA) Project: Empirical Ground Motion Prediction
Equations for Active Tectonic Regions”, Sixth International
Conference on Urban Earthquake Engineering, Pp. 5–11.
S.A. Eftekhari & M. Khani (2010), “A Coupled Finite ElementDifferential Quadrature Element Method and its Accuracy for
Moving Load Problem”, Applied Mathematical Modelling, Vol.
34, Pp. 228–237.
T. Nakano (2013), “Analytical Study on Non-linear Dynamic
Response Analysis of PC Rahmen Bridge under Fault
Movement”, The 2nd Annual Conference on Civil Engineering
and Engineering, Pp. 367–377.
Taiwan Central Weather Bureau (2014), “Taiwan Central
Weather
Bureau
Website”,
http://www.cwb.gov.tw/V7e/earthquake/chichi.htm.
Tomohiro Nakano received his doctoral
degree in engineering from Nagoya
University, Japan, where he studied a mixed
flexibility method for structural analysis and
its application to earthquake engineering,
under the supervision of Prof. Tada-aki
Tanabe, in 2003. In 2005, he joined Tokai
University as assistant professor in the
department of civil engineering. During the
period from September 2011 to February 2012, he was a visiting
associate professor in the department of civil engineering at King
Mongkut’s University of Technology, Thonburi, Thailand.
Presently, he is an associate professor of Tokai University, Japan,
and also belongs to the Japan Society of Civil Engineers, the Japan
Concrete Institute and the Japan Association for Earthquake
Engineering. In addition, he is the author or co-author of 30
publications. His research interests are computer aided civil
engineering; including seismic design of bridge structures, structural
mechanics, non-destructive inspection for concrete members and
retrofit of concrete structures.
© 2014 | Published by The Standard International Journals (The SIJ)
42