A discontinuous Galerkin solver for Boltzmann Poisson systems in nano
devices1
Yingda Cheng2 , Irene M. Gamba3
Department of Mathematics and ICES, University of Texas, Austin, TX 78712
Armando Majorana4
Dipartimento di Matematica e Informatica, Università di Catania, Catania, Italy
and
Chi-Wang Shu5
Division of Applied Mathematics, Brown University, Providence, RI 02912
Abstract
In this paper, we present results of a discontinuous Galerkin (DG) scheme applied to
deterministic computations of the transients for the Boltzmann-Poisson system describing
electron transport in semiconductor devices. The collisional term models optical-phonon
interactions which become dominant under strong energetic conditions corresponding to
nano-scale active regions under applied bias. The proposed numerical technique is a finite
element method using discontinuous piecewise polynomials as basis functions on unstructured
meshes. It is applied to simulate hot electron transport in bulk silicon, in a silicon n+ -n-n+
diode and in a double gated 12nm MOSFET. Additionally, the obtained results are compared
1
Support from the Institute of Computational Engineering and Sciences and the University of Texas
Austin is gratefully acknowledged.
2
E-mail: ycheng@math.utexas.edu.
3
E-mail: gamba@math.utexas.edu. Research supported by NSF-0807712 and NSF-FRG-0757450.
4
E-mail: majorana@dmi.unict.it. Research supported by Italian PRIN 2006: Kinetic and continuum
models for particle transport in gases and semiconductors: analytical and computational aspects.
5
E-mail: shu@dam.brown.edu. Research supported by NSF grant DMS-0809086 and DOE grant DEFG02-08ER25863.
1
to those of a high order WENO scheme simulation and DSMC (Discrete Simulation Monte
Carlo) solvers.
Keywords: Deterministic numerical methods, Discontinuous Galerkin schemes, Boltzmann Poisson systems, Statistical hot electron transport, Semiconductor nano scale devices.
2
1
Introduction
The evolution of the electron distribution function f (t, x, k) in semiconductors in dependence
of time t, position x and electron wave vector k is governed by the Boltzmann transport
equation (BTE) [24, 28, 21]
∂f
1
q
+ ∇k ε · ∇x f − E · ∇k f = Q(f ) ,
∂t
~
~
(1.1)
where ~ is the reduced Planck constant, and q denotes the positive elementary charge. The
function ε(k) is the energy of the considered crystal conduction band measured from the
band minimum; according to the Kane dispersion relation, ε is the positive root of
ε(1 + αε) =
~2 k 2
,
2m∗
(1.2)
where α is the non-parabolicity factor and m∗ the effective electron mass. The electric field
E is related to the doping density ND and the electron density n, which equals the zero-order
moment of the electron distribution function f , by the Poisson equation
∇x [²r (x) ∇x V ] =
q
[n(t, x) − ND (x)] ,
²0
E = −∇x V ,
(1.3)
where ²0 is the dielectric constant of the vacuum, ²r (x) labels the relative dielectric function
depending on the material and V the electrostatic potential. The collision operator Q(f )
takes into account acoustic deformation potential and optical intervalley scattering [31, 29].
For low electron densities, it reads
Z
Q(f )(t, x, k) =
[S(k0 , k)f (t, x, k0 ) − S(k, k0 )f (t, x, k)] dk0
R3
(1.4)
with the scattering kernel
S(k, k0 ) = (nq + 1) K δ(ε(k0 ) − ε(k) + ~ωp )
+ nq K δ(ε(k0 ) − ε(k) − ~ωp ) + K0 δ(ε(k0 ) − ε(k))
(1.5)
and K and K0 being constant for silicon. The symbol δ indicates the usual Dirac distribution
and ωp is the constant phonon frequency. Moreover,
¶
¸−1
·
µ
~ωp
−1
nq = exp
kB TL
3
is the occupation number of phonons, kB is the Boltzmann constant and TL is the constant
lattice temperature.
Semiclassical description of electron flow in semiconductors is an equation in six dimensions (plus time if the device is not in steady state) for a truly 3-D device, and four dimensions
for a 1-D device. This heavy computational cost explains why the BP system is traditionally
simulated by the Direct Simulation Monte Carlo (DSMC) methods [23]. In recent years, deterministic solvers to the BP system were proposed [20, 27, 3, 2, 4, 5, 6, 22]. These methods
provide accurate results which, in general, agree well with those obtained from Monte Carlo
(DSMC) simulations, often at a fractional computational time. Moreover, they can resolve
transient details for the pdf, which are difficult to compute with DSMC simulators. The
methods proposed in [4, 6] used weighted essentially non-oscillatory (WENO) finite difference schemes to solve the Boltzmann-Poisson system. The advantage of the WENO scheme
is that it is relatively simple to code and very stable even on coarse meshes for solutions
containing sharp gradient regions. A disadvantage of the WENO finite difference method is
that it requires smooth meshes to achieve high order accuracy, hence it is not very flexible
for adaptive meshes.
On the other hand, motivated by the easy hp-adaptivity and simple communication
pattern of the discontinuous Galerkin (DG) methods for macroscopic (fluid level) models
[7, 8, 25, 26], we proposed in [11, 10] to implement a DG solver to the full Boltzmann
equation, that is capable of capturing transients of the probability density function (pdf ).
The type of DG method that we will discuss here is a class of finite element methods
originally devised to solve hyperbolic conservation laws containing only first order spatial
derivatives, e.g. [16, 15, 14, 13, 17]. Using completely discontinuous polynomial space
for both the test and trial functions in the spatial variables and coupled with explicit and
nonlinearly stable high order Runge-Kutta time discretization, the method has the advantage
of flexibility for arbitrarily unstructured meshes, with a compact stencil, and with the ability
to easily accommodate arbitrary hp-adaptivity. For more details about DG scheme for
4
convection dominated problems, we refer to the review paper [19]. The DG method was
later generalized to the local DG (LDG) method to solve the convection diffusion equation
[18] and elliptic equations [1]. It is L2 stable and locally conservative, which makes it
particularly suitable to treat the Poisson equation.
In our previous preliminary work [11, 10], we proposed the first DG solver for (1.1) and
showed some numerical calculations for one- and two-dimensional devices. In this paper, we
will carefully formulate the DG-LDG scheme for the Boltzmann-Poisson system and perform
extensive numerical studies to validate our calculation. In addition, using this new scheme,
we are able to implement a solver to full energy bands [9] that no other deterministic solver
has been able to implement so far. It would be more difficult or even unpractical to produce
the full band computation with other transport scheme.
This paper is organized as follows: in Section 2, we review the change of variables in
[27, 5]. In Section 3, we study the DG-BTE solver for 1D diodes. Section 4 is devoted to
the discussion of the 2D double gate MOSFET DG solver. Conclusions and final remarks
are presented in Section 5. Some technical implementations of the DG solver are collected
in the Appendix.
2
Change of variables
In this section, we review the change of variables proposed in [27, 4].
For the numerical treatment of the system (1.1), (1.3), it is convenient to introduce
suitable dimensionless quantities and variables. We assume TL = 300 K. Typical values for
length, time and voltage are `∗ = 10−6 m, t∗ = 10−12 s and V∗ = 1 Volt, respectively. Thus,
we define the dimensionless variables
(x, y) =
x
,
`∗
t=
t
,
t∗
Ψ=
V
,
V∗
(Ex , Ey , 0) =
with E∗ = 0.1 V∗ `−1
∗ and
Ex = −cv
∂Ψ
,
∂x
Ey = −cv
5
∂Ψ
,
∂y
cv =
V∗
.
`∗ E∗
E
E∗
In correspondence to [27] and [5], we perform a coordinate transformation for k according
to
√
³ p
´
p
2m∗ kB TL p
2
2
k=
w(1 + αK w) µ, 1 − µ cos ϕ, 1 − µ sin ϕ ,
(2.6)
~
ε
where the new independent variables are the dimensionless energy w =
, the cosine of
kB TL
the polar angle µ and the azimuth angle ϕ with αK = kB TL α. The main advantage of the
generalized spherical coordinates (2.6) is the easy treatment of the Dirac distribution in the
kernel (1.5) of the collision term. In fact, this procedure enables us to transform the integral
operator (1.4) with the nonregular kernel S into an integral-difference operator, as shown in
the following.
We are interested in studying problems that are two-dimensional in real space and threedimensional in k-space. It would be useful to consider the new unknown function Φ related
to the electron distribution function via
Φ(t, x, y, w, µ, ϕ) = s(w)f (t, x, k) ,
where
s(w) =
p
w(1 + αK w)(1 + 2αK w),
(2.7)
is proportional to the Jacobian of the change of variables (2.6) and, apart from a dimensional
constant factor, to the density of states. This allows us to write the free streaming operator
of the dimensionless Boltzmann equation in a conservative form, which is appropriate for
applying standard numerical schemes used for hyperbolic partial differential equations. Due
to the symmetry of the problem and of the collision operator, we have
Φ(t, x, y, w, µ, 2π − ϕ) = Φ(t, x, y, w, µ, ϕ) .
(2.8)
Straightforward but cumbersome calculations end in the following transport equation for Φ:
∂Φ
∂
∂
∂
∂
∂
+
(g1 Φ) +
(g2 Φ) +
(g3 Φ) +
(g4 Φ) +
(g5 Φ) = C(Φ) .
∂t
∂x
∂y
∂w
∂µ
∂ϕ
6
(2.9)
The functions gi (i = 1, 2, .., 5) in the advection terms depend on the independent variables
w, µ, ϕ as well as on time and position via the electric field. They are given by
p
µ w(1 + αK w)
g1 (·) = cx
,
1 + 2αK w
p
p
1 − µ2 w(1 + αK w) cos ϕ
g2 (·) = cx
,
1 + 2αK w
p
i
p
w(1 + αK w) h
g3 (·) = − 2ck
µ Ex (t, x, y) + 1 − µ2 cos ϕ Ey (t, x, y) ,
1 + 2αK w
p
hp
i
1 − µ2
2
1 − µ Ex (t, x, y) − µ cos ϕ Ey (t, x, y) ,
g4 (·) = − ck p
w(1 + αK w)
sin ϕ
p
g5 (·) = ck p
Ey (t, x, y)
w(1 + αK w) 1 − µ2
with
t∗
cx =
`∗
r
t∗ qE∗
2 kB TL
and ck = √ ∗
.
∗
m
2m kB TL
The right hand side of (2.9) is the integral-difference operator
½ Z π Z 1
C(Φ)(t, x, y, w, µ, ϕ) = s(w) c0
dϕ0
dµ0 Φ(t, x, y, w, µ0 , ϕ0 )
0
−1
¾
Z π Z 1
0
0
0
0
0
0
+ dϕ
dµ [c+ Φ(t, x, y, w + γ, µ , ϕ ) + c− Φ(t, x, y, w − γ, µ , ϕ )]
0
−1
− 2π[c0 s(w) + c+ s(w − γ) + c− s(w + γ)]Φ(t, x, y, w, µ, ϕ) ,
where
(c0 , c+ , c− ) =
2m∗ t∗ p
2 m∗ kB TL (K0 , (nq + 1)K, nq K) ,
~3
γ=
~ωp
kB TL
are dimensionless parameters. We remark that the δ distributions in the kernel S have been
eliminated which leads to the shifted arguments of Φ. The parameter γ represents the jump
constant corresponding to the quantum of energy ~ωp . We have also taken into account (2.8)
in the integration with respect to ϕ0 . Since the energy variable ω is not negative, we must
consider null Φ and the function s, if the argument ω − γ is negative.
In terms of the new variables the electron density becomes
µ√
Z
n(t∗ t, `∗ x, `∗ y) =
R3
f (t∗ t, `∗ x, `∗ y, k) dk =
7
2 m∗ kB TL
~
¶3
ρ(t, x, y) ,
where
Z
Z
+∞
ρ(t, x, y) =
Z
1
dw
π
dµ
0
dϕ Φ(t, x, y, w, µ, ϕ) .
−1
(2.10)
0
Hence, the dimensionless Poisson equation is
µ
¶
µ
¶
∂
∂Ψ
∂
∂Ψ
²r
+
²r
= cp [ρ(t, x, y) − ND (x, y)]
∂x
∂x
∂y
∂y
with
µ√
ND (x, y) =
2 m∗ kB TL
~
µ√
¶−3
ND (`∗ x, `∗ y) and cp =
2 m∗ kB TL
~
(2.11)
¶3
`2∗ q
.
²0
Choosing the same values of the physical parameters as in [27], we obtain
c0 ≈ 0.26531
cx ≈ 0.16857 cp ≈ 1830349.
c+ ≈ 0.50705 ck ≈ 0.32606
cv = 10.
c− ≈ 0.04432 γ ≈ 2.43723
αK ≈ 0.01292
²r = 11.7
Moreover, the dimensional x-component of the velocity is given by
Z +∞ Z 1 Z π
dw
dµ dϕ g1 (w, µ) Φ(t, x, y, w, µ, ϕ)
0
−1
0
ρ(t, x, y)
,
the dimensional density by
1.0115 × 1026 × ρ(t, x, y) ,
and the energy by
Z
+∞
Z
0.025849 ×
−1
π
dϕ w Φ(t, x, y, w, µ, ϕ)
dµ
dw
0
Z
1
0
ρ(t, x, y)
.
In a simplified model, we consider our device in the x−direction by assuming that the
doping profile, the potential and thus the force field are only x−dependent. By cylindrical symmetry, the resulting distribution function does not depend on ϕ. In this case, the
Boltzmann transport equation is reduced to
∂Φ
∂
∂
∂
+
(g1 Φ) +
(g3 Φ) +
(g4 Φ) = C(Φ) .
∂t
∂x
∂w
∂µ
8
(2.12)
with
p
w(1 + αK w)
,
1 + 2αK w
p
w(1 + αK w)
− 2ck
µ E(t, x) ,
1 + 2αK w
1 − µ2
− ck p
E(t, x)
w(1 + αK w)
g1 (·) = cx
g3 (·) =
g4 (·) =
µ
and
½
Z 1
C(Φ)(t, x, w, µ) = s(w) c0 π
dµ0 Φ(t, x, w, µ0 )
−1
¾
Z 1
0
0
0
+π
dµ [c+ Φ(t, x, w + γ, µ ) + c− Φ(t, x, w − γ, µ )]
−1
− 2π[c0 s(w) + c+ s(w − γ) + c− s(w + γ)]Φ(t, x, w, µ) ,
In terms of the new variables the electron density becomes
µ√
Z
n(t∗ t, `∗ x) =
R3
f (t∗ t, `∗ x, k) dk =
where
Z
Z
+∞
ρ(t, x) = π
¶3
ρ(t, x) ,
1
dw
0
2 m∗ kB TL
~
dµ Φ(t, x, w, µ) .
(2.13)
−1
Hence, the dimensionless Poisson equation writes
∂
∂x
µ
∂Ψ
²r
∂x
¶
= cp [ρ(t, x) − ND (x)]
(2.14)
and
E = −cv
3
3.1
∂Ψ
.
∂x
DG-BTE solver for 1D diodes simulation
Algorithm description
We begin with formulating the DG-BTE solver for 1D diodes. These examples have been
thoroughly studied and tested by WENO in [4].
9
The Boltzmann-Poisson system (2.12) and (2.14) will be solved on the domain
x ∈ [0, L],
w ∈ [0, wmax ],
µ ∈ [−1, 1],
where L is the dimensionless length of the device and wmax is the maximum value of the
energy, which is adjusted in the numerical experiments such that
Φ(t, x, w, µ) ≈ 0
for w ≥ wmax
and every t, x, µ.
In (2.12), g1 and g3 are completely smooth in the variable w and µ, assuming E is given
and smooth. However, g4 is singular for the energy w = 0, although it is compensated by
the s(w) factor in the definition of Φ.
The initial value of f is a locally Maxwellian distribution at the temperature TL ,
Φ(0, x, w, µ) = s(w)ND (x)e−w M
with the numerical parameter M chosen so that the initial value for the density is equal to
the doping ND (x).
We choose to perform our calculations on the following rectangular grid,
h
i h
i h
i
Ωikm = xi− 1 , xi+ 1 × wk− 1 , wk+ 1 × µm− 1 , µm+ 1
2
2
2
2
2
2
(3.15)
where i = 1, . . . Nx , k = 1, . . . Nw , m = 1, . . . Nµ , and
xi± 1 = xi ±
2
∆xi
,
2
wk± 1 = wk ±
2
∆wk
,
2
µm± 1 = µm ±
2
∆µm
.
2
It is useful that we pick Nµ to be even, so the function g1 will assume a constant sign in each
cell Ωikm .
The approximation space is thus defined as
Vh` = {v : v|Ωikm ∈ P ` (Ωikm )},
(3.16)
where P ` (Ωikm ) is the set of all polynomials of degree at most ` on Ωikm . The DG formulation
10
for the Boltzmann equation (2.12) would be: to find Φh ∈ Vh` , such that
Z
Z
Z
(Φh )t vh dΩ −
g1 Φh (vh )x dΩ −
Ωikm
Ωikm
Z
−
Ωikm
g3 Φh (vh )w dΩ
Ωikm
g4 Φh (vh )µ dΩ + Fx+ − Fx− + Fw+ − Fw− + Fµ+ − Fµ−
(3.17)
Z
=
C(Φh ) vh dΩ.
Ωikm
for any test function vh ∈ Vh` . In (3.17),
Z
Fx+
wk+ 1
Z
2
=
2
wk− 1
Z
2
wk+ 1
Z
2
=
wk− 1
Z
2
xi+ 1
xi− 1
Z
Fw−
Z
xi+ 1
Z
Z
=
xi− 1
=
xi+ 1
2
2
g3 Φ̂ vh+ (x, wk− 1 , µ)dx dµ,
2
2
Z
wk+ 1
2
Z
g4 Φ̃ vh− (x, w, µm+ 1 )dx dw,
2
wk− 1
2
xi− 1
µm+ 1
µm− 1
2
Z
Fµ−
xi+ 1
2
2
xi− 1
g3 Φ̂ vh− (x, wk+ 1 , µ)dx dµ,
2
µm− 1
2
2
Fµ+
µm+ 1
2
2
=
g1 Φ̌ vh+ (xi− 1 , w, µ)dw dµ,
2
µm− 1
2
=
µm+ 1
2
2
Fw+
g1 Φ̌ vh− (xi+ 1 , w, µ)dw dµ,
2
µm− 1
2
Fx−
µm+ 1
2
wk+ 1
2
wk− 1
g4 Φ̃ vh+ (x, w, µm− 1 )dx dw,
2
2
where the upwind numerical fluxes Φ̌, Φ̂, Φ̃ are chosen according to the following rules,
• The sign of g1 only depends on µ, if µm > 0, Φ̌ = Φ− ; otherwise, Φ̌ = Φ+ .
• The sign of g3 only depends on µE(t, x), if µm E(t, xi ) < 0, Φ̂ = Φ− ; otherwise, Φ̂ = Φ+ .
• The sign of g4 only depends on E(t, x), if E(t, xi ) < 0, Φ̃ = Φ− ; otherwise, Φ̃ = Φ+ .
At the source and drain contacts, we implement the same boundary condition as proposed
in [6] to realize neutral charges. In the (w, µ)-space, no boundary condition is necessary, since
• at w = 0, g3 = 0. At w = wmax , Φ is machine zero.
11
• At µ = ±1, g4 = 0,
Fw+ , Fw− , Fµ+ , Fµ− are always zero. This saves us the effort of constructing ghost elements in
comparison with WENO.
The Poisson equation (2.14) is solved by the LDG method on a consistent grid of (3.15)
in the x−direction. It involves rewriting the equation into the following form,
q = ∂Ψ
∂x
∂
(²r q) = R(t, x)
∂x
(3.18)
where R(t, x) = cp [ρ(t, x) − ND (x)] is a known function that can be computed at each time
step once Φ is solved from (3.17), and the coefficient ²r here is a constant. The grid we use
i
h
is Ii = xi− 1 , xi+ 1 , with i = 1, . . . , Nx . The approximation space is
2
2
Wh` = {v : v|Ii ∈ P ` (Ii )},
with P ` (Ii ) denoting the set of all polynomials of degree at most ` on Ii . The LDG scheme
for (3.18) is given by: to find qh , Ψh ∈ Vh` , such that
Z
Z
Ψh (vh )x dx − Ψ̂h vh− (xi+ 1 ) + Ψ̂h vh+ (xi− 1 ) = 0,
2
2
Z
Z
−
+
−
²r qh (ph )x dx + ²c
R(t, x)ph dx
r q h ph (xi+ 1 ) − ²c
r q h ph (xi− 1 ) =
qh vh dx +
Ii
Ii
Ii
2
2
(3.19)
Ii
hold true for any vh , ph ∈ Wh` . In the above formulation, the flux is chosen as follows,
+
+
−
Ψ̂h = Ψ−
r q h = ²r qh − [Ψh ], where [Ψh ] = Ψh − Ψh . At x = L we need to flip the flux
h , ²c
−
to Ψ̂h = Ψ+
r q h = ²r qh − [Ψh ] to adapt to the Dirichlet boundary conditions. Solving
h , ²c
(3.19), we can obtain the numerical approximation of the electric potential Ψh and electric
field Eh = −cv qh on each cell Ii .
We include some of the technical details of the implementations for a 2D device in the
Appendix. 1D diodes simulation carries similar steps and is simpler. We start with an initial
value for Φh described in Section A.5. The DG-LDG algorithm advances from tn to tn+1 in
the following steps:
12
Step 1 Compute ρh (t, x) = π
R +∞ R 1
dw −1 dµ Φh (t, x, w, µ) as described in Section A.6.
0
Step 2 Use ρh (t, x) to solve from (3.19) the electric field, and compute gi , i = 1, 3, 4 on each
computational element.
Step 3 Solve (3.17) and get a method of line ODE for Φh , see Sections A.2, A.3 and A.4.
Step 4 Evolve this ODE by proper time stepping from tn to tn+1 , if partial time step is
necessary, then repeat Step 1 to 3 as needed.
Finally, the hydrodynamic moments can be computed at any time step by the method in
Section A.6.
We want to remark that, unlike WENO, the DG formulation above has no restriction on
the mesh size. In fact, nonuniform meshes are more desirable in practice. For small semiconductor devices with highly doped, non-smooth regions, strong relative electric fields give high
energy to charged particles, so it is expected to create states whose distribution functions
f have high densities in some regions but low densities in others. Only a nonuniform grid
can guarantee accurate results without using a large number of grid points. In particular
the evolving distribution function f (t, x, k) has, at some regions points in the physical domain corresponding to strong force fields, a shape that is very different from a Maxwellian
distribution (the expected equilibrium statistical state in the absence of electric field), see
for example Figure 3.11. Moreover, taking into account the rapid decay of f for large value
of |k|, a nonuniform grid is more computational efficient without sacrificing accuracy of the
calculation.
In the following simulations, we have implemented, without self-adaptivity, a nonuniform
mesh that refines locally near the regions where most of the interesting phenomena happen,
that is the junctions of the channel, addressing one of the main difficulties in solving the
Boltzmann-Poisson system with the presence of the doping, which creates strong gradients
of the solution near its jumps, and the polar angle direction µ = 1, corresponding to the
alignment with the force electric field.
13
Consequently, for this first computational implementations of the DG solver, using the
ansatz that the doping profile function ND (x) in the Poisson equation does not depend on
time, we have the advantage to know where we need a fine grid in space to guarantee a
reasonable accuracy.
Even in the simplest test problem of the bulk case, the electric field is constant and
the solution is spatially homogeneous. If the initial condition is a Maxwellian distribution
function, then, for high constant electric field, one observes the overshoot velocity problem
which stabilizes in time. This fact implies that the final state distribution tails change with
respect to the initial one, and the distribution has also a shift proportional to the potential
energy Φ, therefore a simple choice a fixed mesh in (w, µ) works for a given constant electric
field that depends on a potential bias at contacts. In general, due to the stabilization
nature of the Boltzmann-Poisson system, the choice of a fixed non-uniform mesh works for
this preliminary implementation. However, the magnitude of the gradient variation of the
solutions depends on the applied bias, ultimately adaptivity will be the most efficient way
to calculate the solution, and so self adaptive DG schemes will be studied in our future
work. Nevertheless, we anticipate that a self adaptive scheme has the advantage of a smaller
number of cells, but the overhead for the adjustment of the solution to a new grid might be
CPU time consuming.
3.2
Discussions on benchmark test problems
We consider two benchmark test examples: Si n+ − n − n+ diodes of a total length of 1
and 0.25µm, with 400 and 50nm channels located in the middle of the device, respectively.
For the 400nm channel device, the dimensional doping is given by ND = 5 × 1017 cm−3 in
the n+ region and ND = 2 × 1015 cm−3 in the n− region. For the 50nm channel device, the
dimensional doping is given by ND = 5 × 1018 cm−3 in the n+ region and ND = 1 × 1015 cm−3
in the n− region. Both examples were computed by WENO in [5].
In our simulation, we use piecewise linear polynomials, i.e. ` = 1, and second-order
14
Runge-Kutta time discretization. The doping ND is smoothed in the following way near
the channel junctions to obtain non-oscillatory solutions. Suppose ND = ND+ in the n+
region, ND = ND− in the n− region and the length of the transition region is 2 cells, then the
smoothed function is (ND+ − ND− )(1 − y 3 )3 + ND− , where y = (x − x0 + 4x)/(24x + 10−20 )
is the coordinate transformation that makes the transition region (x0 − 4x, x0 + 4x) varies
from 0 to 1 in y.
The nonuniform mesh we use for 400nm channels is defined as follows. In the x-direction, if
x < 0.2µm or x > 0.4µm, 4x = 0.01µm. In the region 0.2µm < x < 0.4µm, 4x = 0.005µm.
Thus, the total number of cells in x direction is 120. In the w-direction, we use 60 uniform
cells. In the µ-direction, we use 24 cells, 12 in the region µ < 0.7, 12 in µ > 0.7. Thus, the
grid consists of 120 × 60 × 24 cells, compared to the WENO grid of 180 × 60 × 24 uniform
cells. We should remark that there are more degrees of freedom per cell for DG than for
WENO, hence a more adequate comparison is the CPU cost to obtain the same level of
errors, see for example [30] in which such a comparison is made for some simple examples
indicating the advantage of DG in certain situations.
We plot the evolution of density, mean velocity, energy and momentum in Figure 3.1.
Due to the conservation of mass, which the DG scheme satisfies for our boundary condition,
one can see that when the momentum becomes constant, the solution is stable. The solution
has already stabilized at t = 5.0ps from the momentum plots. The macroscopic quantities at
steady state are plotted in Figure 3.2. The results are compared with the WENO calculation.
They agree with each other in general, with DG offering more resolution and a higher peak
in energy near the junctions. This is crucial to obtain a more agreeable kinetic energy with
experiments and DSMC simulations. Figures 3.3 and 3.4 show comparisons for the pdf at
transient and steady state. We plot at different positions of the device, namely, the left,
center and right of the channel. We notice a larger value of pdf especially at the center of
the channel, where the pdf is no longer Maxwellian. Moreover, at t = 0.5ps, x0 = 0.5µm,
the pdf shows a double hump structure, which is not captured by the WENO solver. All of
15
these advantages come from the fact that we are refining more near µ = 1. To have a better
idea of the shape of the pdf, we plot Φ(t = 5.0ps, x = 0.5µm) in the cartesian coordinates in
Figure 3.9. The coordinate V 1 in the plot is the momentum parallel to the force field k1 , V 2
is the modulus of the orthogonal component. The peak is captured very sharply compared
to WENO, see Figures 3 and 4 in [5].
1E+07
density
velocity
4E+17
2E+17
5
5
0
4
4
t
0
3
2
1
0
0.2
0.4 x
0.6
0.8
3
2
1
1
0.2
0
0.4 x
0.6
0.8
1
2E+23
energy
0.2
0
momentum
t
0.1
5
-2E+23
4
5
t
3
2
1
0
0.2
0.4 x
0.6
0.8
4
1
t
1
3
0.8
0.6
2
0.4 x
1
0.2
0
Figure 3.1: Time evolution of macroscopic quantities using DG method for 400nm channel
at Vbias = 1.0V . Top left: density in cm−3 ; top right: mean velocity in cm/s; bottom left:
energy in eV ; bottom right: momentum in cm−2 s−1 .
16
4E+17
density
velocity
8E+06
4E+06
2E+17
0.2
0.4
x
0.6
0
0.8
0.2
0.4
0.2
0.4
0.2
0.4
x
0.6
0.8
0.6
0.8
0.6
0.8
20
E
energy
0.15
0.1
0
-20
-40
0.05
0.2
0.4
x
0.6
-60
0.8
x
momentum
1
potential
0.8
0.6
1E+23
0.4
0.2
0
0.2
0.4
x
0.6
0.8
x
Figure 3.2: Comparison of macroscopic quantities using DG (symbols) and WENO (solid
line) for 400nm channel at t = 5.0ps, Vbias = 1.0V . Top left: density in cm−3 ; top right:
mean velocity in cm/s; middle left: energy in eV ; middle right: electric field in kV /cm;
bottom left: potential in V ; bottom right: momentum in cm−2 s−1 . Solution has reached
steady state.
17
0.0003
0.0002
0.0002
Φ
Φ
0.0003
0.0001
0.0001
0
1
0
1
-1
0
µ
µ
0
0
20
10
30
-1
w
8E-07
10
0
10
0
10
20
30
20
30
20
30
w
8E-07
Φ
Φ
4E-07
4E-07
0
1
0
1
-1
0
µ
0
µ
0
0
20
10
30
-1
w
w
0.0005
0.0004
0.0004
Φ
Φ
0.0003
0.0002
0.0002
0.0001
0
1
µ
µ
0
1
0
-1
0
20
10
30
0
-1
w
w
Figure 3.3: Comparison of the snapshot for Φ(x0 , w, µ) using DG (left) and WENO (right)
for 400nm channel at t = 0.5ps, Vbias = 1.0V . Top: x0 = 0.3µm; middle: x0 = 0.5µm;
bottom: x0 = 0.7µm. Solution has not yet reached steady state.
18
0.0003
0.0003
0.0002
Φ
Φ
0.0002
0.0001
0.0001
0
1
0
1
-1
0
µ
µ
0
0
20
10
30
-1
w
8E-06
8E-06
6E-06
6E-06
Φ
Φ
4E-06
4E-06
2E-06
2E-06
0
1
0
1
-1
0
20
10
30
-1
w
0.00025
0
10
0
10
20
30
20
30
20
30
w
w
0.00025
0.0002
0.0002
Φ
Φ
0.00015
0.00015
0.0001
0.0001
5E-05
5E-05
0
0
1
1
0
-1
µ
µ
10
0
µ
µ
0
0
0
20
10
30
0
-1
w
w
Figure 3.4: Comparison of the snapshot for Φ(x0 , w, µ) using DG (left) and WENO (right)
for 400nm channel at t = 5.0ps, Vbias = 1.0V . Top: x0 = 0.3µm; middle: x0 = 0.5µm;
bottom: x0 = 0.7µm. Solution has reached steady state.
19
The nonuniform mesh we use for 50nm channels is defined as follows. In the x-direction,
near the junctions, in 0.09µm < x < 0.11µm and 0.14µm < x < 0.16µm , 4x = 0.001µm;
in center of the channel 0.11µm < x < 0.14µm, 4x = 0.005µm; at everywhere else, 4x =
0.01µm. Thus, the total number of cells in x direction is 64. In the w-direction, we use 60
uniform cells. In the µ-direction, we use 20 cells, 10 in the region µ < 0.7, 10 in µ > 0.7. Thus,
the grid consists of 64 × 60 × 20 cells, compared to the WENO calculation of 150 × 120 × 16
uniform cells. The evolution and steady state plots are listed in Figures 3.5 to 3.8. The
conclusions are similar with 400nm, that we obtain better resolutions near the channel
junctions and the peak for pdf is much higher. Figure 3.10 plots Φ(t = 5.0ps, x = 0.125µm)
in the cartesian coordinates. The peak is twice the height of WENO and is very sharp.
Figure 3.11 plots the pdf near x = 0.15µm, the drain junction. We obtain distributions
far away from statistical equilibrium, that reflects the lack of suitability of the classical
hydrodynamical models for the drain region of a small gated device under even moderate
voltage bias.
3.3
Comparisons with DSMC simulations
We compare the results from DG-BTE solver with those obtained from DSMC simulations
(see Figures 3.12, 3.13). Both simulations show good agreement except for the kinetic energy
near the boundaries.
This mismatch is due to the modeling of the contact boundary conditions in DSMC
simulations, which require the knowledge of the distribution function f (or the corresponding
energy-band transform Φ) for entering particles. A classical way to solve this problem for
DSMC simulations is done by the inclusion of a transport kinetic equation for the dynamic
of the electron at the metal junctions. However, this is not realistic due to the complexity
of this new kinetic equation, where the importance of electron-electron interaction requires
a nonlinear collisional operator, similar to the classical one of the Boltzmann equation for a
rarefied perfect gas.
20
Nevertheless, traditionally, boundary conditions associated with these DSMC models
for charge electron transport have been implemented by the following two simplistic rules
consisting on the assumption that the distribution function f , near the contact but outside
the computational domain is, either proportional to a Maxwellian equilibrium distribution
function for incoming velocities, or related to f evaluated near the contact and inside the
computational domain. (For strong electric fields near the boundaries, these choices are not
correct, as they may required a shift Maxwellian or a condition that generates momentum
in the direction of the field. )
The first option is well accepted when a high doping concentration near the boundaries
yields a very small electric field: so, the electron gas, in these zones, is almost in the thermal
equilibrium and has a constant velocity approximately. That is, we could use the ansatz that
the distribution function Φ, in the outer side of the boundary is taken to be proportional to a
energy-band spherically transformed Maxwellian equilibrium distribution function centered
at zero energy, whose average matches the doping profile function ND (x) at the boundary.
However this approach will create boundary layers of the mean free path order and so the
condition do not secure an absolute charge neutrality.
Hence, we rather use the second option which imposes that f = fout , near the contact
and outside the computational domain (k · ηxb < 0) where xb is a boundary point and ηxb the
outer normal, is related to f = fin evaluated near the contact and inside the computational
domain (k · ηxb > 0). This approach allow us to get an exact neutral charge at the source
and drain contact boundaries, which imposes that the probability and doping density must
coincide, as well as continuity in velocity space. Then the simple formula,
Φout (t, xb , w, µ) =
ND (xb )
Φin (t, xb , w, µ)
ρ(t, xb )
(3.20)
is assumed in our simulations, where Φout is the band-energy spherically coordinated transformed fout , in the corresponding transform domain.
This very same boundary type condition (3.20) at the gate and drain contacts has been
used in the deterministic simulations of Boltzmann Poison systems for semiconductor devices
21
by WENO schemes (see [6]) and are use here for the DG schemes to approximate the same
boundary value problem. So the agreement of lower moments is very good, even though at
the computational level, (3.20) is approximated in different ways depending on the numerical
scheme.
For example, in the case of DSMC simulations, particles must be created or destroyed.
However in the case of finite difference WENO schemes, we introduced suitable ghost points
[4, 6]; and in the case of DG schemes it is enough to give values of Φ at boundaries according
to condition (3.20).
Hence, we can not have a unique exact boundary conditions in the computational experiments, which makes it clear that these differences in the numerical boundary treatment have
an influence for the solutions at the stationary regime, which explains the discrepancies of
the numerical comparisons of moments near the boundaries. Nevertheless, we stress that, as
the figures 3.5 and 3.6 show in all cases, there is a very good agreement of the comparisons
inside the device.
3.4
Summary
We have benchmarked the DG algorithm on two test cases: Si n+ − n − n+ diodes with 400
and 50nm channels. The DG scheme has the ability to quickly stabilize to the steady state
and accurately resolve transient details. In particular, the pdf along the direction of the
electric field is captured sharply due to the nonuniform mesh we use. For the more energetic
device with 50nm channel, DG computes a much higher peak and a ”donut” shaped tail
in the pdf near the drain junction, thus resulting in an accurate description of higher order
moments in those regions.
22
velocity
density
4E+18
1E+07
2E+18
3
3
t 2
t 2
1
0
0.05
0.1 x
0.15
0.2
0.25
1
0.05
0
0.1 x
0.15
0.2
0.25
1.2E+25
0.8
9E+24
momentum
0.4
energy
0.6
0.2
3
6E+24
3
2
t
1
0
0.05
0.1 x
0.15
0.2
0
0.25
0.25
2
t
0.2
0.15
1
0.1 x
0.05
0
Figure 3.5: Time evolution of macroscopic quantities using DG method for 50nm channel
at Vbias = 1.0V . Top left: density in cm−3 ; top right: mean velocity in cm/s; bottom left:
energy in eV ; bottom right: momentum in cm−2 s−1 .
23
velocity
density
4E+18
1E+07
2E+18
0.1
x
0.15
0.2
0.4
0
0.3
-100
0.05
0.1
0.05
0.1
0.05
0.1
x
0.15
0.2
0.15
0.2
0.15
0.2
E
energy
0.05
-200
0.2
-300
0.1
-400
0.05
0.1
x
0.15
0.2
x
1
8E+24
0.6
momentum
potential
0.8
0.4
0.2
0
0.05
0.1
x
0.15
0.2
6E+24
x
Figure 3.6: Comparison of macroscopic quantities using DG (symbols) and WENO (solid
line) for 50nm channel at t = 3.0ps, Vbias = 1.0V . Top left: density in cm−3 ; top right:
mean velocity in cm/s; middle left: energy in eV ; middle right: electric field in kV /cm;
bottom left: potential in V ; bottom right: momentum in cm−2 s−1 . Solution has reached
steady state.
24
0.005
0.005
0.004
0.004
Φ
Φ
0.003
0.003
0.002
0.002
0.001
0.001
0
1
0
1
-1 0
0
µ
µ
0
40
20
60
-1 0
w
0.001
40
60
40
60
w
Φ
Φ
0.0005
0
1
0
1
0
µ
0
-1 0
40
20
60
-1 0
w
0.0005
0.0005
0.0004
0.0004
20
w
Φ
Φ
0.0003
0.0003
0.0002
0.0002
0.0001
0.0001
0
1
0
1
0
-1 0
µ
µ
60
0.001
0.0005
µ
40
20
40
20
60
0
-1 0
w
20
w
Figure 3.7: Comparison of the snapshot for Φ(x0 , w, µ) using DG (left) and WENO (right)
for 50nm channel at t = 0.5ps, Vbias = 1.0V . Top: x0 = 0.1µm ; middle: x0 = 0.125µm;
bottom: x0 = 0.15µm. Solution has not yet reached steady state.
25
0.005
0.005
0.004
0.004
Φ
Φ
0.003
0.003
0.002
0.002
0.001
0.001
0
1
0
1
-1 0
0
µ
µ
0
40
20
60
-1 0
w
0.0015
0.0015
0.001
0.001
0.0005
0.0005
0
1
0
1
-1 0
40
20
60
-1 0
w
0.0006
0.0006
0.0004
0.0004
20
60
40
60
w
Φ
Φ
0.0002
0.0002
0
1
0
1
0
-1 0
µ
µ
40
w
0
µ
0
µ
60
Φ
Φ
40
20
40
20
60
0
-1 0
w
20
w
Figure 3.8: Comparison of the snapshot for Φ(x0 , w, µ) using DG (left) and WENO (right)
solution for 50nm channel at t = 3.0ps, Vbias = 1.0. Top: x0 = 0.1µm; middle: x0 =
0.125µm; bottom: x0 = 0.15µm. Solution has reached steady state.
26
1E-05
8E-06
pdf
6E-06
4E-06
2E-06
0
5
5
0 1
V
V 20
-5
-5
Figure 3.9: PDF for 400nm channel at t = 5.0ps, x = 0.5µm. Center of the channel.
pdf
0.0004
0.0002
0
10
10
5
5
V2 0
-5
-5
-10
0 1
V
-10
Figure 3.10: PDF for 50nm channel at t = 3.0ps, x = 0.125µm. Center of the channel.
27
0.0001
0.00012
8E-05
6E-05
pdf
pdf
8E-05
4E-05
4E-05
2E-05
0
0
10
10
10
5
5
5
V2 0
10
-5
5
V2 0
0 V1
-5
-10
0
-5
-5
-10
-10
V1
-10
0.009
0.0004
pdf
pdf
0.006
0.0002
0.003
0
0
10
10
10
5
5
5
V2 0
0
-5
-5
-10
10
5
V2 0
V1
0
-5
-5
-10
-10
V1
-10
Figure 3.11: Non equilibrium PDF states near the drain junction for 50nm channel at
t = 3.0ps. They exhibit the large deviation from classical statistical states even at places
corresponding to highly doped region. This is a signature of hot electron transport. Top
left: x = 0.149µm. Top right: x = 0.15µm. Bottom left: x = 0.152µm. Bottom right:
x = 0.16µm.
28
4E+17
density
velocity
8E+06
2E+17
4E+06
0
0.2
0.4
x
0.6
0
0.8
0
0.2
0.4
0
0.2
0.4
0.2
0.4
x
0.6
0.8
1
0.6
0.8
1
0.6
0.8
1
20
E
energy
0.15
0.1
0
-20
-40
0.05
0.2
0.4
x
0.6
0.8
1
x
momentum
0
potential
0.8
1E+23
0.4
0
0
0.2
0.4
x
0.6
0.8
1
x
Figure 3.12: Comparison of macroscopic quantities using DG (dashed line) and DSMC (solid
line) for 400nm channel at t = 5.0ps, Vbias = 1.0V . Top left: density in cm−3 ; top right:
mean velocity in cm/s; middle left: energy in eV ; middle right: electric field in kV /cm;
bottom left: potential in V ; bottom right: momentum in cm−2 s−1 . Solution has reached
steady state.
29
5E+18
1.8E+07
density
4E+18
1.2E+07
velocity
3E+18
2E+18
6E+06
1E+18
0
0.05
0.1
x
0.15
0.2
0.25
0
0.05
0.1
0
0.05
0.1
0
0.05
0.1
x
0.15
0.2
0.25
0.15
0.2
0.25
0.15
0.2
0.25
100
0
E
energy
0.4
0.3
-100
0.2
-200
-300
0.1
0
0.05
0.1
x
0.15
0.2
-400
0.25
x
9E+24
momentum
1
potential
0.8
0.6
7.5E+24
0.4
0.2
6E+24
0
0
0.05
0.1
x
0.15
0.2
0.25
x
Figure 3.13: Comparison of macroscopic quantities using DG (dashed line) and DSMC (solid
line) for 50nm channel at t = 3.0ps, Vbias = 1.0V . Top left: density in cm−3 ; top right:
mean velocity in cm/s; middle left: energy in eV ; middle right: electric field in kV /cm;
bottom left: potential in V ; bottom right: momentum in cm−2 s−1 . Solution has reached
steady state.
30
4
DG-BTE solver for 2D double gate MOSFET simulation
In this section, we turn to a 2D double gate MOSFET device. The algorithm is similar to
those described in the previous section. For the benefit of the reader, we repeat some of the
procedures in Section 3. We will use a simple rectangular grid and let
i h
i h
i h
i h
i
h
Ωijkmn = xi− 1 , xi+ 1 × yj− 1 , yj+ 1 × wk− 1 , wk+ 1 × µm− 1 , µm+ 1 × ϕn− 1 , ϕn+ 1
2
2
2
2
2
2
2
2
2
2
where i = 1, . . . Nx , j = 1, . . . Ny , k = 1, . . . Nw , m = 1, . . . Nµ , n = 1, . . . Nϕ , and
∆xi
,
2
xi± 1 = xi ±
2
yj± 1 = yj ±
2
µm± 1 = µm ±
2
∆µm
,
2
∆yj
,
2
wk± 1 = wk ±
2
ϕn± 1 = ϕn ±
2
∆wk
2
∆ϕn
.
2
The approximation space is defined as
Vh` = {v : v|Ωijkmn ∈ P ` (Ωijkmn )}.
(4.21)
Here, P ` (Ωijkmn ) is the set of all polynomials of degree at most ` on Ωijkmn . The DG
formulation for the Boltzmann equation (2.9) would be: to find Φh ∈ Vh` , such that
Z
Z
Z
(Φh )t vh dΩ −
g2 Φh (vh )y dΩ
Z
Z
Z
g3 Φh (vh )w dΩ −
g4 Φh (vh )µ dΩ −
g5 Φh (vh )ϕ dΩ
−
(4.22)
Ωijkmn
Ωijkmn
Ωijkmn
Z
+
−
+
−
+
−
+
−
+
−
C(Φh ) vh dΩ.
+ Fx − Fx + Fy − Fy + Fw − Fw + Fµ − Fµ + Fϕ − Fϕ =
Ωijkmn
g1 Φh (vh )x dΩ −
Ωijkmn
Ωijkmn
Ωijkmn
for any test function vh ∈ Vh` . In (4.22),
Z
Fx±
yj+ 1
Z
2
=
yj− 1
Z
=
2
Z
2
2
Z
2
2
2
g1 Φ̌ vh∓ (xi± 1 , y, w, µ, ϕ)dy dw dµ dϕ,
2
ϕn− 1
µm+ 1
µm− 1
ϕn+ 1
2
2
wk+ 1
wk− 1
Z
µm− 1
2
2
µm+ 1
2
wk− 1
xi+ 1
xi− 1
Z
2
2
Fy±
wk+ 1
Z
ϕn+ 1
2
ϕn− 1
g2 Φ̄ vh∓ (x, yj± 1 , w, µ, ϕ)dx dw dµ dϕ,
2
2
31
Z
Fw±
xi+ 1
Z
2
=
xi− 1
Z
xi− 1
Z
=
yj+ 1
2
xi− 1
2
wk+ 1
Z
2
yj− 1
2
2
Z
ϕn+ 1
2
2
Z
∓
gg
4 Φ vh (x, y, w, µm± 1 , ϕ)dx dy dw dϕ,
2
ϕn− 1
2
yj+ 1
∓
gd
3 Φ vh (x, y, wk± 1 , µ, ϕ)dx dy dµ dϕ,
2
ϕn− 1
wk− 1
2
xi+ 1
Z
2
ϕn+ 1
2
2
yj− 1
2
Fϕ±
Z
Z
µm− 1
2
2
µm+ 1
2
yj− 1
xi+ 1
=
Z
2
2
Fµ±
yj+ 1
2
wk+ 1
Z
2
wk− 1
2
µm+ 1
2
µm− 1
g5 Φ̇ vh∓ (x, y, w, µ, ϕn± 1 )dx dy dw dµ,
2
2
g
where the upwind numerical fluxes Φ̌, Φ̄, gd
3 Φ, g4 Φ, Φ̇ are defined in the following way,
• The sign of g1 only depends on µ, if µm > 0, then Φ̌ = Φ− ; otherwise, Φ̌ = Φ+ .
• The sign of g2 only depends on cos ϕ, if cos ϕn > 0, then Φ̄ = Φ− ; otherwise, Φ̄ = Φ+ .
Note that in our simulation, Nϕ is always even.
• For gd
3 Φ, we let
p
i
p
w(1 + αK w) h
2 cos ϕ E (t, x, y)Φ̃ ,
gd
Φ
=
−2c
µ
E
(t,
x,
y)
Φ̂
+
1
−
µ
3
k
x
y
1 + 2αK w
If µm Ex (t, xi , yj ) < 0, then Φ̂ = Φ− ; otherwise, Φ̂ = Φ+ .
If (cos ϕn )Ey (t, xi , yj ) < 0, then Φ̃ = Φ− ; otherwise, Φ̃ = Φ+ .
• For gg
4 Φ, we let
gg
4 Φ = −ck p
p
1 − µ2
w(1 + αK w)
hp
i
1 − µ2 Ex (t, x, y)Φ̂ − µ cos ϕ Ey (t, x, y)Φ̃ ,
If Ex (t, xi , yj ) < 0, then Φ̂ = Φ− ; otherwise, Φ̂ = Φ+ .
If µm cos(ϕn )Ey (t, xi , yj ) > 0, then Φ̃ = Φ− ; otherwise, Φ̃ = Φ+ .
• The sign of g5 only depends on Ey (t, x, y), if Ey (t, xi , yj ) > 0, then Φ̇ = Φ− ; otherwise,
Φ̇ = Φ+ .
32
The schematic plot of the double gate MOSFET device is given in Figure 4.14. The
shadowed region denotes the oxide-silicon region, whereas the rest is the silicon region.
Since the problem is symmetric about the x-axis, we will only need to compute for y > 0.
At the source and drain contacts, we implement the same boundary condition as proposed
in [6] to realize neutral charges. A buffer layer of ghost points of i = 0 and i = Nx + 1 is
used to make
Φ(i = 0) = Φ(i = 1)
ND (i = 1)
,
ρ(i = 1)
and
Φ(i = Nx + 1) = Φ(i = Nx )
ND (i = Nx )
.
ρ(i = Nx )
At the top and bottom of the computational domain (the silicon region), we impose the
classical elastic specular boundary reflection.
In the (w, µ, ϕ)-space, no boundary condition is necessary because of similar reason as in
the 1D case,
• at w = 0, g3 = 0. At w = wmax , Φ is machine zero;
• at µ = ±1, g4 = 0;
• at ϕ = 0, π, g5 = 0,
so at those boundaries, the numerical flux always vanishes, hence no ghost point is necessary.
For the boundary condition of the Poisson equation, Ψ = 0.52354 at source, Ψ = 1.5235
at drain and Ψ = 1.06 at gate. For the rest of boundaries, we impose homogeneous Neumann
boundary condition, i.e.,
∂Ψ
∂n
= 0. The relative dielectric constant in the oxide-silicon region
is ²r = 3.9, in the silicon region is ²r = 11.7.
The Poisson equation (2.11) is solved by the LDG method. It involves rewriting the
equation into the following form,
∂Ψ
∂Ψ
q=
,
s=
∂x
∂y
∂
∂
(²r q) +
(²r s) = R(t, x, y)
∂x
∂y
33
(4.23)
y
50nm
50nm
1nm
top gate
drain
source
12nm
1111111111111111111111111111111111111111111
0000000000000000000000000000000000000000000
0000000000000000000000000000000000000000000
1111111111111111111111111111111111111111111
x
1111111111111111111111111111111111111111111
0000000000000000000000000000000000000000000
0000000000000000000000000000000000000000000
1111111111111111111111111111111111111111111
bottom gate
150nm
Figure 4.14: Schematic representation of a 2D double gate MOSFET device
where R(t, x, y) = cp [ρ(t, x, y) − ND (x, y)] is a known function that can be computed at each
time step once Φ is solved from (4.22), and the coefficient ²r depends on x, y. The Poisson
i h
i
h
system is only on the (x, y) domain. Hence, we use the grid Iij = xi− 1 , xi+ 1 × yj− 1 , yj+ 1 ,
2
2
2
2
with i = 1, . . . , Nx , j = 1, . . . , Ny + My , where j = Ny + 1, . . . , Ny + My denotes the oxidesilicon region, and the grid in j = 1, . . . , Ny is consistent with the five-dimensional rectangular
grid for the Boltzmann equation in the silicon region. The approximation space is defined
as
Wh` = {v : v|Iij ∈ P ` (Iij )}.
(4.24)
Here P ` (Iij ) denotes the set of all polynomials of degree at most ` on Iij . The LDG scheme
34
for (4.23) is: to find qh , sh , Ψh ∈ Vh` , such that
Z
Z
Z y 1
Z
j+ 2
−
qh vh dxdy +
Ψh (vh )x dxdy −
Ψ̂h vh (xi+ 1 , y)dy +
Ii,j
Ii,j
Z
yj− 1
Z
sh wh dxdy +
Ii,j
Z
Ψh (wh )y dxdy −
Ii,j
Z
−
yj+ 1
2
Z
Z
²r sh (ph )y dxdy +
Z
=
Z
Ψ̃h wh− (x, yj+ 1 )dx
2
Z
2
−
²c
r q h ph (xi+ 1 , y)dy −
xi+ 1
2
−
²f
r sh ph (x, yj+ 1 )dx
2
2
−
+
yj+ 1
2
Ψ̂h vh+ (xi− 1 , y)dy = 0,
2
2
xi+ 1
2
xi− 1
Ψ̃h wh+ (x, yj− 1 )dx = 0,
2
2
+
²c
r q h ph (xi− 1 , y)dy
2
yj− 1
Z
2
xi− 1
Ii,j
2
2
yj− 1
Ii,j
xi+ 1
2
yj− 1
2
xi− 1
Z
²r qh (ph )x dxdy +
−
2
yj+ 1
2
xi+ 1
2
xi− 1
+
²f
r sh ph (x, yj− 1 )dx
2
2
R(t, x, y)ph dxdy
(4.25)
Ii,j
hold true for any vh , wh , ph ∈ Wh` . In the above formulation, we choose the flux as follows,
+
−
in the x-direction, we use Ψ̂h = Ψ−
r q h = ²r qh − [Ψh ]. In the y-direction, we use Ψ̃h = Ψh ,
h , ²c
+
²f
r sh = ²r sh − [Ψh ]. On some part of the domain boundary, the above flux needs to be
changed to accommodate various boundary conditions [12]. Near the drain, we are given
Dirichlet boundary condition, so we need to flip the flux in x−direction: let Ψ̂h (xi+ 1 , y) =
2
Ψ+
h (xi+ 12 , y)
and ²c
r q h (xi+ 1 , y) =
2
²r qh− (xi+ 1 , y)
2
− [Ψh ](xi+ 1 , y), if the point (xi+ 1 , y) is at the
2
2
drain. For the gate, we need to flip the flux in y−direction: let Ψ̃h (x, yj+ 1 ) = Ψ+
h (x, yj+ 1 )
2
and ²f
r sh (x, yj+ 1 ) =
2
² r s−
h (x, yj+ 21 )
2
− [Ψh ](x, yj+ 1 ), if the point (x, yj+ 1 ) is at the gate. For
2
2
the bottom, we need to use the Neumann condition, and flip the flux in y-direction, i.e.,
−
Ψ̃h = Ψ+
r sh = ²r sh . This scheme described above will enforce the continuity of Ψ and
h , ²f
²r ∂Ψ
across the interface of silicon and oxide-silicon interface. The solution of (4.25) gives us
∂n
approximations to both the potential Ψh and the electric field (Ex )h = −cv qh , (Ey )h = −cv sh .
To summarize, start with an initial condition for Φh (Section A.5), the DG-LDG algorithm for the 2D double gate MOSFET advances from tn to tn+1 in the following steps similar
to the 1D diodes simulation:
Step 1 Compute ρh (t, x, y) =
R +∞ R 1
Rπ
dw
dµ
dϕ Φh (t, x, y, w, µ, ϕ) as described in Section
0
−1
0
A.6.
Step 2 Use ρh (t, x, y) to solve from (4.25) the electric field (Ex )h and (Ey )h , and compute
35
gi , i = 1, . . . , 5.
Step 3 Solve (4.22) and get a method of line ODE for Φh , see Sections A.2, A.3 and A.4.
Step 4 Evolve this ODE by proper time stepping from tn to tn+1 , if partial time step is
necessary, then repeat Step 1 to 3 as needed.
Finally, the hydrodynamic moments can be computed at any time step by the method in
Section A.6.
All numerical results are obtained with a piecewise linear approximation space and first
order Euler time stepping. The dissipative nature of the the collision term makes the Euler
forward time stepping stable. We use a 24 × 14 grid in space, 120 points in w, 8 points
in µ and 6 points in ϕ. In Figures 4.15 and 4.16, we show the results of the macroscopic
quantities. We also show the pdf at six different locations in the device in Figure 4.17. These
pdf ’s have been computed by averaging the values of Φh over ϕ. In Figure 4.18, we present
the cartesian plot for pdf at (x, y) = (0.125µm, 0.012µm), where a very non-equilibrium pdf
is observed.
36
1.2e+25
1e+25
8e+24
6e+24
4e+24
2e+24
0
0.00 0.03
0.06 0.09
x
0.12 0.15
1.8e+07
1.6e+07
1.4e+07
1.2e+07
1e+07
8e+06
6e+06
4e+06
2e+06
0
0.00 0.03
0.06 0.09
x
0.12 0.15
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.00 0.03
0.06 0.09
x
0.12 0.15
0.012
0.009
0.006
y
0.003
1.5e+06
1e+06
500000
0
-500000
0.012
-1e+06
0.009
0.006
0.00 0.03
y
0.003
0.06 0.09
x
0.12 0.15
0.012
0.009
0.006
y
0.003
0.012
0.009
0.006
y
0.003
Figure 4.15: Macroscopic quantities of double gate MOSFET device at t = 0.5ps. Top left:
density in cm−3 ; top right: energy in eV ; bottom left: x-component of velocity in cm/s;
bottom right: y-component of velocity in cm/s. Solution reached steady state.
37
0
0
-200
-400
-600
-800
-50
-100
-150
0.00 0.03
0.06 0.09
x
0.12 0.15
0.012
0.009
0.006
y
0.003
0.00 0.03
0.06 0.09
x
0.12 0.15
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0.00 0.03
0.06 0.09
x
0.12 0.15
0.012
0.009
0.006
y
0.003
0.012
0.009
0.006
y
0.003
Figure 4.16: Macroscopic quantities of double gate MOSFET device at t = 0.5ps. Top left:
x-component of electric field in kV /cm; top right: y-component of electric field in kV /cm;
bottom: electric potential in V . Solution has reached steady state.
38
0.0016
0.002
0.0014
0.0012
0.0015
0.001
0.0008
0.001
0.0006
0.0004
0.0005
0.0002
0
0
0
0
0.5
20
w
60
0.5
20
0 µ
40
0 µ
40
w
-0.5
60
-0.5
0.002
0.001
0.0015
0.0008
0.0006
0.001
0.0004
0.0005
0.0002
0
0
0
0
0.5
20
40
w
60
0.5
20
0 µ
0 µ
40
w
-0.5
60
-0.5
0.001
0.0015
0.0008
0.001
0.0006
0.0004
0.0005
0.0002
0
0
0
0
0.5
20
40
w
60
0.5
20
0 µ
0 µ
40
w
-0.5
60
-0.5
Figure 4.17: PDF of double gate MOSFET device at t = 0.5ps. Top left: at
(0.025µm, 0.012µm); top right: at (0.075µm, 0.012µm); middle left: at (0.125µm, 0.012µm)
; middle right: at (0.1375µm, 0.006µm); bottom left: at (0.09375µm, 0.010µm) ; bottom
right: at (0.09375µm, 0µm.) . Solution reached steady state.
39
0.0003
pdf
0.0002
0.0001
0
10
10
5
5
V2 0
0
-5
V1
-5
-10
-10
Figure 4.18: PDF for 2D double gate MOSFET at t = 0.5ps, (x, y) = (0.9375µm, 0.10µm).
40
5
Conclusions and final remarks
We have developed a DG scheme for BTEs of type (1.1), which takes into account opticalphonon interactions that become dominant under strong energetic conditions. We used the
coordinate transformation proposed in [27, 4] and changed the collision into an integraldifference operator by using energy band as one of the variables. The Poisson equation is
treated by LDG on a mesh that is consistent with the mesh of the DG-BTE scheme. The
results are compared to those obtained from a high order WENO scheme simulation. By a
local refinement in mesh, we were able to capture the subtle kinetic effects including very
non-equilibrium distributions without a great increase of memory allocation and CPU time.
The advantage of the DG scheme lies in its potential for implementation on unstructured
meshes and for full hp-adaptivity. The simple communication pattern of the DG method
also makes it a good candidate for the domain decomposition method for the coupled kinetic
and macroscopic models.
References
[1] D. Arnold, F. Brezzi, B. Cockburn and L. Marini, Unified analysis of discontinuous
Galerkin methods for elliptic problems, SIAM Journal on Numerical Analysis, 39 (2002),
pp. 1749-1779.
[2] M.J. Caceres, J.A. Carrillo, I.M. Gamba, A. Majorana and C.-W. Shu, Deterministic
kinetic solvers for charged particle transport in semiconductor devices, in Transport Phenomena and Kinetic Theory Applications to Gases, Semiconductors, Photons, and Biological Systems. C. Cercignani and E. Gabetta (Eds.), Birkhäuser (2006), pp. 151-171.
[3] J.A. Carrillo, I.M. Gamba, A. Majorana and C.-W. Shu, A WENO-solver for 1D nonstationary Boltzmann-Poisson system for semiconductor devices, Journal of Computational Electronics, 1 (2002), pp. 365-375.
41
[4] J.A. Carrillo, I.M. Gamba, A. Majorana and C.-W. Shu, A direct solver for 2D nonstationary Boltzmann-Poisson systems for semiconductor devices: a MESFET simulation
by WENO-Boltzmann schemes, Journal of Computational Electronics, 2 (2003), pp. 375380.
[5] J.A. Carrillo, I.M. Gamba, A. Majorana and C.-W. Shu, A WENO-solver for the transients of Boltzmann-Poisson system for semiconductor devices. Performance and comparisons with Monte Carlo methods, Journal of Computational Physics, 184 (2003), pp. 498525.
[6] J.A. Carrillo, I.M. Gamba, A. Majorana and C.-W. Shu, 2D semiconductor device simulations by WENO-Boltzmann schemes: efficiency, boundary conditions and comparison
to Monte Carlo methods, Journal of Computational Physics, 214 (2006), pp. 55-80.
[7] Z. Chen, B. Cockburn, C. Gardner and J. Jerome, Quantum hydrodynamic simulation of
hysteresis in the resonant tunneling diode, Journal of Computational Physics, 274 (1995),
pp. 274-280.
[8] Z. Chen, B. Cockburn, J. W. Jerome and C.-W. Shu, Mixed-RKDG finite element methods for the 2-d hydrodynamic model for semiconductor device simulation, VLSI Design,
3 (1995), pp. 145-158.
[9] Y. Cheng, I. Gamba, A. Majorana and C.-W. Shu, A Discontinuous Galerkin Solver for
Full-Band Boltzmann-Poisson Models, to appear in the Proceeding of IWCE 13.
[10] Y. Cheng, I. Gamba, A. Majorana and C.-W. Shu, Discontinuous Galerkin solver for
Boltzmann-Poisson transients , Journal of Computational Electronics, 7 (2008), pp. 119123.
[11] Y. Cheng, I.M. Gamba, A. Majorana and C.-W. Shu, Discontinuous Galerkin Solver
for the Semiconductor Boltzmann Equation, SISPAD 07, T. Grasser and S. Selberherr,
editors, Springer (2007) pp. 257-260.
42
[12] B. Cockburn and B. Dong, An analysis of the minimal dissipation local discontinuous
Galerkin method for convection-diffusion problems, Journal of Scientific Computing, 32
(2007), pp. 233-262.
[13] B. Cockburn, S. Hou and C.-W. Shu, The Runge-Kutta local projection discontinuous Galerkin finite element method for conservation laws IV: the multidimensional case,
Mathematics of Computation, 54 (1990), pp. 545-581.
[14] B. Cockburn, S.-Y. Lin and C.-W. Shu, TVB Runge-Kutta local projection discontinuous Galerkin finite element method for conservation laws III: one dimensional systems,
Journal of Computational Physics, 84 (1989), pp. 90-113.
[15] B. Cockburn and C.-W. Shu, TVB Runge-Kutta local projection discontinuous Galerkin
finite element method for conservation laws II: general framework, Mathematics of Computation, 52 (1989), pp. 411-435.
[16] B. Cockburn and C.-W. Shu, The Runge-Kutta local projection P1-discontinuous
Galerkin finite element method for scalar conservation laws, Mathematical Modelling
and Numerical Analysis, 25 (1991), pp. 337-361.
[17] B. Cockburn and C.-W. Shu, The Runge-Kutta discontinuous Galerkin method for
conservation laws V: multidimensional systems, Journal of Computational Physics, 141
(1998), pp. 199-224.
[18] B. Cockburn and C.-W. Shu, The local discontinuous Galerkin method for timedependent convection-diffusion systems, SIAM Journal on Numerical Analysis, 35 (1998),
pp. 2440-2463.
[19] B. Cockburn and C.-W. Shu, Runge-Kutta discontinuous Galerkin methods for convection-dominated problems, Journal of Scientific Computing, 16 (2001), pp. 173-261.
43
[20] E. Fatemi and F. Odeh, Upwind finite difference solution of Boltzmann equation applied
to electron transport in semiconductor devices, Journal of Computational Physics, 108
(1993), pp. 209-217.
[21] D.K. Ferry, Semiconductors, Maxwell MacMillian: New-York, 1991.
[22] M. Galler and A. Majorana, Deterministic and stochastic simulation of electron transport in semiconductors, to appear in Bulletin of the Institute of Mathematics, Academia
Sinica (New Series), 6th MAFPD (Kyoto) special issue Vol. 2 (2007), No. 2, pp. 349-365.
[23] C. Jacoboni and P. Lugli, The Monte Carlo method for semiconductor device simulation,
Spring-Verlag: Wien-New York, 1989.
[24] M. Lundstrom, Fundamentals of Carrier Transport, Cambridge University Press: Cambridge, 2000.
[25] Y.-X. Liu and C.-W. Shu, Local discontinuous Galerkin methods for moment models in
device simulations: formulation and one dimensional results, Journal of Computational
Electronics, 3 (2004), pp. 263-267.
[26] Y.-X. Liu and C.-W. Shu, Local discontinuous Galerkin methods for moment models
in device simulations: Performance assessment and two dimensional results, Applied
Numerical Mathematics, 57 (2007), pp. 629-645.
[27] A. Majorana and R. Pidatella, A finite difference scheme solving the Boltzmann Poisson
system for semiconductor devices, Journal of Computational Physics, 174 (2001), pp. 649668.
[28] P.A. Markowich, C. Ringhofer and C. Schmeiser, Semiconductor Equations, SpringerVerlag: New–York, 1990.
[29] K. Tomizawa, Numerical simulation of sub micron semiconductor devices, Artech House:
Boston, 1993.
44
[30] T. Zhou, Y. Li and C.-W. Shu, Numerical comparison of WENO finite volume and
Runge-Kutta discontinuous Galerkin methods, Journal of Scientific Computing, 16 (2001),
pp. 145-171.
[31] J.M. Ziman, Electrons and Phonons. The Theory of Transport Phenomena in Solids,
Oxford University Press: Oxford, 2000.
45
A
Appendix
In this appendix, we collect some technical details for the implementation of the 2D DG-BTE
solver. The discussion for 1D solver is similar and omitted here.
A.1
The basis of the finite dimensional function space.
In every cell Ωijkmn , we use piecewise linear polynomials and assume
2(x − xi )
2(y − yj )
+ Yijkmn (t)
∆xi
∆yj
2(w − wk )
2(µ − µm )
2(ϕ − ϕn )
+ Mijkmn (t)
+ Pijkmn (t)
.
+ Wijkmn (t)
∆wk
∆µm
∆ϕn
Φh (t, x, y, w, µ, ϕ) = Tijkmn (t) + Xijkmn (t)
(A.1)
It will be useful to note that
Nw ·
X
2(x − xi )
2(y − yj )
Φh (t, x, y, w, µ, ϕ) =
Tijkmn (t) + Xijkmn (t)
+ Yijkmn (t)
∆xi
∆yj
k=1
¸
2(µ − µm )
2(ϕ − ϕn )
2(w − wk )
χk (w) ,
+ Mijkmn (t)
+ Pijkmn (t)
+ Wijkmn (t)
∆wk
∆µm
∆ϕn
Nw
[
Ωijkmn . Here, χk (w) is the characteristic function in the interval
for every (x, y, w, µ, ϕ) ∈
k=1
h
i
wk− 1 , wk+ 1 .
2
A.2
2
Treatment of the collision operator
The gain term of the collisional operator is
½ Z π Z 1
G(Φh )(t, x, y, w) = s(w) c0
dϕ0
dµ0 Φh (t, x, y, w, µ0 , ϕ0 )
0
−1
¾
Z π Z 1
0
0
0
0
0
0
dµ [c+ Φh (t, x, y, w + γ, µ , ϕ ) + c− Φh (t, x, y, w − γ, µ , ϕ )] . (A.2)
+ dϕ
0
−1
Now, we define
Z
(vh )mn (x, y, w) :=
ϕn+ 1
2
Z
dϕ
ϕn− 1
µm+ 1
2
µm− 1
2
2
46
dµ vh (x, y, w, µ, ϕ) ,
and, for σ = −γ, 0, γ, we have
·
¸
Z
Z π Z 1
0
0
0
0
vh (x, y, w, µ, ϕ) s(w) dϕ
dµ Φ(t, x, y, w + σ, µ , ϕ ) dx dy dw dµ dϕ
Ωijkmn
Z
0
Z
π
=
dϕ
0
0
dµ
−1
0
=
Z
1
xi+ 1
2
yj+ 1
2
dx
xi− 1
Z
wk+ 1
2
dy
yj− 1
2
Nµ Nϕ Z
X
X
m0 =1 n0 =1
Z
−1
dw s(w) Φ(t, x, y, w + σ, µ0 , ϕ0 ) (vh )mn (x, y, w)
wk− 1
2
2
s(w) Φh (t, x, y, w + σ, µ0 , ϕ0 ) (vh )mn (x, y, w) dx dy dw dµ0 dϕ0 .
Ωijkm0 n0
Now we discuss the following integral for different test function vh ,
·
¸
Z
Z π Z 1
0
0
0
0
I=
vh (x, y, w, µ, ϕ) s(w) dϕ
dµ Φh (t, x, y, w + σ, µ , ϕ ) dx dy dw dµ dϕ .
Ωijkmn
0
−1
• For vh (x, y, w, µ, ϕ) = 1,
I=
Nµ N ϕ Nw
X
XX
∆µ
m0
Z
∆ϕ Tijk0 m0 n0 (t)
+ Wijk0 m0 n0 (t)
2
wk− 1
m0 =1 n0 =1 k0 =1
Z
wk+ 1
n0
2
wk+ 1
2
s(w)
wk− 1
s(w) χk0 (w + σ) dw
2(w + σ − wk0 )
χk0 (w + σ) dw ∆xi ∆yj ∆µm ∆ϕn .
∆wk0
2
• For vh (x, y, w, µ, ϕ) =
2(x−xi )
,
∆xi
Nµ Nϕ Nw
X
XX
1
I = ∆xi ∆yj ∆µm ∆ϕn
∆µm0 ∆ϕn0 Xijk0 m0 n0 (t)
3
0
0
0
m =1 n =1 k =1
Z w 1
k+ 2
s(w) χk0 (w + σ) dw .
×
wk− 1
2
• For vh (x, y, w, µ, ϕ) =
2(y−yj )
,
∆yj
Nµ Nϕ Nw
X
XX
1
∆µm0 ∆ϕn0 Yijk0 m0 n0 (t)
I = ∆xi ∆yj ∆µm ∆ϕn
3
m0 =1 n0 =1 k0 =1
Z w 1
k+ 2
×
s(w) χk0 (w + σ) dw .
wk− 1
2
47
• For vh (x, y, w, µ, ϕ) =
I=
Nµ Nϕ Nw
X
XX
2(w−wk )
,
∆wk
Z
∆µm0 ∆ϕn0 Tijk0 m0 n0 (t)
+ Wijk0 m0 n0 (t)
2
s(w)
wk− 1
m0 =1 n0 =1 k0 =1
Z
wk+ 1
2
wk+ 1
2
s(w)
wk− 1
2(w − wk )
χk0 (w + σ) dw
∆wk
4(w + σ − wk0 )(w − wk )
χk0 (w + σ) dw ∆xi ∆yj ∆µm ∆ϕn .
∆wk0 ∆wk
2
• For vh (x, y, w, µ, ϕ) =
2(µ−µm )
,
∆µm
I = 0.
• For vh (x, y, w, µ, ϕ) =
2(ϕ−ϕn )
,
∆ϕn
I = 0.
The lost term in the collision operator is
2π[c0 s(w) + c+ s(w − γ) + c− s(w + γ)]Φ(t, x, y, w, µ, ϕ) .
(A.3)
Let
ν(w) = 2π[c0 s(w) + c+ s(w − γ) + c− s(w + γ)] ,
then we need to evaluate numerically,
Z
0
ν(w) Φh (t, x, y, w, µ, ϕ) vh (x, y, w, µ, ϕ) dx dy dw dµ dϕ .
I =
Ωijkmn
• For vh (x, y, w, µ, ϕ) = 1,
I 0 = ∆xi ∆yj ∆µm ∆ϕn
Z
Z w 1
k+ 2
× Tijkmn (t)
ν(w) dw + Wijkmn (t)
wk− 1
2
ν(w)
wk− 1
2
• For vh (x, y, w, µ, ϕ) =
wk+ 1
2(w − wk )
dw .
∆wk
2
2(x−xi )
,
∆xi
1
I = ∆xi ∆yj ∆µm ∆ϕn Xijkmn (t)
3
0
Z
wk+ 1
2
wk− 1
2
48
ν(w) dw .
• For vh (x, y, w, µ, ϕ) =
2(y−yj )
,
∆yj
1
I = ∆xi ∆yj ∆µm ∆ϕn Yijkmn (t)
3
Z
wk+ 1
2
0
ν(w) dw .
wk− 1
2
• For vh (x, y, w, µ, ϕ) =
2(w−wk )
,
∆wk
Z
I = ∆xi ∆yj ∆µm ∆ϕn Tijkmn (t)
0
wk+ 1
2
ν(w)
wk− 1
2
Z
+ Wijkmn (t)
wk+ 1
2
2
ν(w)
wk− 1
2
• For vh (x, y, w, µ, ϕ) =
2(w − wk )
dw
∆wk
4(w − wk )
dw .
(∆wk )2
2(µ−µm )
,
∆µm
1
I = ∆xi ∆yj ∆µm ∆ϕn Mijkmn (t)
3
Z
wk+ 1
2
0
ν(w) dw .
wk− 1
2
• For vh (x, y, w, µ, ϕ) =
2(ϕ−ϕn )
,
∆ϕn
1
I = ∆xi ∆yj ∆µm ∆ϕn Pijkmn (t)
3
0
Z
wk+ 1
2
wk− 1
2
49
ν(w) dw .
A.3
Integrals related to the collisional operator
We need to evaluate (some numerically) the following integrals
Z
wk+ 1
2
s(w) χk0 (w + σ) dw
wk− 1
Z
2
wk+ 1
2
s(w)
2(w + σ − wk0 )
χk0 (w + σ) dw
∆wk0
s(w)
2(w − wk )
χk0 (w + σ) dw
∆wk
s(w)
4(w + σ − wk0 )(w − wk )
χk0 (w + σ) dw
∆wk0 ∆wk
wk− 1
Z
2
wk+ 1
2
wk− 1
Z
2
wk+ 1
2
wk− 1
Z
2
wk+ 1
2
ν(w) dw
wk− 1
Z
2
wk+ 1
2(w − wk )
dw
∆wk
·
¸2
2(w − wk )
ν(w)
dw .
∆wk
2
ν(w)
wk− 1
Z
2
wk+ 1
2
wk− 1
2
If we evaluate these integrals by means of numerical quadrature formulas, then it is appropriate to eliminate the singularity of the function s(w) at w = 0 by change of variables.
Z
b
s(w) dw =
w(1 + αK w)(1 + 2αK w) dw
a
a
Z
=
Z
Z bp
b
p
Z
s(ŵ) dŵ
a−γ
Z √b−γ
=
(w = r2 + γ)
s(w̄) dw̄
a+γ
Z √b+γ
=
1 + αK r2 (1 + 2αK r2 ) 2 r2 dr ,
a−γ
b+γ
s(w + γ) dw =
a
p
√
Z
b
(w = r2 )
a
b−γ
s(w − γ) dw =
a
1 + αK r2 (1 + 2αK r2 ) 2 r2 dr ,
√
Z
b
√
√
p
1 + αK r2 (1 + 2αK r2 ) 2 r2 dr .
a+γ
50
(w = r2 − γ)
A.4
Integrals related to the free streaming operator
We recall that
g2 (·) =
g3 (·) =
g4 (·) =
g5 (·) =
p
w(1 + αK w)
,
1 + 2αK w
p
p
1 − µ2 w(1 + αK w) cos ϕ
,
cx
1 + 2αK w
p
i
p
w(1 + αK w) h
− 2ck
µ Ex (t, x, y) + 1 − µ2 cos ϕ Ey (t, x, y) ,
1 + 2αK w
p
hp
i
1 − µ2
2
− ck p
1 − µ Ex (t, x, y) − µ cos ϕ Ey (t, x, y) ,
w(1 + αK w)
sin ϕ
p
Ey (t, x, y) .
ck p
w(1 + αK w) 1 − µ2
g1 (·) = cx
µ
Now, we define:
p
s1 (w) =
w(1 + αK w)
,
1 + 2αK w
w(1 + αK w)
We need to evaluate the integrals.
Z b
Z bp
w(1 + αK w)
dw =
1 + 2αK w
s1 (w) dw =
a
Z
a
Z
b
a
Z
b
a
1
p
s2 (w) dw =
a
b
=
Z
b
s2 (w)
a
dw =
w(1 + αK w)
2(w − wk )
s1 (w)
dw =
∆wk
2(w − wk )
dw =
∆wk
Z
=
b
a
Z
√
b
a
b
√
√
√
b
√
Z
a
√
√
√
1 + αK r2 2
2 r dr ,
1 + 2αK r2
b
√
a
2
dr ,
1 + αK r2
w(1 + αK w) 2(w − wk )
dw
1 + 2αK w
∆wk
√
1 + αK r2 2(r2 − wk ) 2
2 r dr ,
1 + 2αK r2
∆wk
p
a
Z
.
p
√
Z
Z
1
s2 (w) = p
2(w − wk )
dw
∆wk
w(1 + αK w)
b
√
a
51
1
2
2(r2 − wk )
dr
∆wk
1 + αK r2
Z
b
a
·
2(w − wk )
s1 (w)
∆wk
¸2
dw =
=
Z
b
a
·
2(w − wk )
s2 (w)
∆wk
¸2
dw =
=
A.5
p
·
¸
w(1 + αK w) 2(w − wk ) 2
dw
1 + 2αK w
∆wk
a
·
¸2
Z √b √
1 + αK r2 2(r2 − wk )
2 r2 dr ,
2
√
∆wk
a 1 + 2αK r
·
¸2
Z b
1
2(w − wk )
p
dw
∆wk
w(1 + αK w)
a
¸2
· 2
Z √b
2
2(r − wk )
√
dr .
√
∆wk
1 + αK r2
a
Z
b
Initial condition
Since measure(Ωijkmn ) = ∆xi ∆yj ∆wk ∆µm ∆ϕn , we have
Z
Φh (0, x, y, w, µ, ϕ) dx dy dw dµ dϕ = measure(Ωijkmn ) Tijkmn (0) ,
Ωijkmn
Z
Φh (0, x, y, w, µ, ϕ)
2(x − xi )
1
dx dy dw dµ dϕ = measure(Ωijkmn ) Xijkmn (0) ,
∆xi
3
Φh (0, x, y, w, µ, ϕ)
2(y − yj )
1
dx dy dw dµ dϕ = measure(Ωijkmn ) Yijkmn (0) ,
∆yj
3
Φh (0, x, y, w, µ, ϕ)
2(w − wk )
1
dx dy dw dµ dϕ = measure(Ωijkmn ) Wijkmn (0) ,
∆wk
3
Φh (0, x, y, w, µ, ϕ)
2(µ − µm )
1
dx dy dw dµ dϕ = measure(Ωijkmn ) Mijkmn (0) ,
∆µm
3
Φh (0, x, y, w, µ, ϕ)
2(ϕ − ϕn )
1
dx dy dw dµ dϕ = measure(Ωijkmn ) Pijkmn (0) .
∆ϕn
3
Ωijkmn
Z
Ωijkmn
Z
Ωijkmn
Z
Ωijkmn
Z
Ωijkmn
If, for each (x, y) and (µ, ϕ),
(
Φh (0, x, y, w, µ, ϕ) =
and
F (x, y) = Fij (constant)
F (x, y) s(w) e−w for w < wNw + 1
2
0
otherwise
h
i h
i
∀(x, y) ∈ xi− 1 , xi+ 1 × yj− 1 , yj+ 1 ,
2
52
2
2
2
then it is reasonable to assume
Fij
Tijkmn (0) =
∆wk
Z
wk+ 1
2
s(w) e−w dw ,
(A.4)
wk− 1
2
Xijkmn (0) = Yijkmn (0) = 0 ,
Fij
Wijkmn (0) = 3
∆wk
Z
wk+ 1
2
(A.5)
s(w) e−w
wk− 1
2(w − wk )
dw ,
∆wk
(A.6)
2
Mijkmn (0) = Pijkmn (0) = 0 .
(A.7)
Recalling the definition (2.10) of the dimensionless charge density, we have
ρ(0, x, y) = 2 π F (x, y)
Nw Z
X
k=1
wk+ 1
2
s(w) e−w dw ,
wk− 1
2
which gives a relationship between F (x, y) and the initial charge density ρ.
A.6
Hydrodynamical variables
h
i
h
i
If (x, y) ∈ xi− 1 , xi+ 1 × yj− 1 , yj+ 1 , then
2
2
2
2
Nµ N ϕ ·
Nw X
X
X
2(x − xi )
ρh (t, x, y) =
Tijkmn (t) + Xijkmn (t)
∆xi
k=1 m=1 n=1
¸
2(y − yj )
+ Yijkmn (t)
∆wk ∆µm ∆ϕn .
∆yj
(A.8)
We define
T̂ij (t) =
Nµ N ϕ
Nw X
X
X
Tijkmn (t) ∆wk ∆µm ∆ϕn
k=1 m=1 n=1
Nw Nµ N ϕ
X̂ij (t) =
XXX
Xijkmn (t) ∆wk ∆µm ∆ϕn
k=1 m=1 n=1
Nw Nµ N ϕ
Ŷij (t) =
XXX
Yijkmn (t) ∆wk ∆µm ∆ϕn .
k=1 m=1 n=1
i h
i
Therefore, for every (x, y) ∈ xi− 1 , xi+ 1 × yj− 1 , yj+ 1 ,
h
2
2
ρh (t, x, y) = T̂ij (t) + X̂ij (t)
2
2
2(x − xi )
2(y − yj )
+ Ŷij (t)
.
∆xi
∆yj
53
(A.9)
h
i h
i
For every (x, y) ∈ xi− 1 , xi+ 1 × yj− 1 , yj+ 1 , the approximate momentum in x-direction is
2
2
N µ Nϕ
Nw X
X
X
2
2
∆ϕn [g1,km Tijkmn (t) + g1w,km Wijkmn (t) + g1µ,km Mijkmn (t)]
k=1 m=1 n=1
" N Nµ
w
+
Nϕ
XXX
#
∆ϕn g1,km Xijkmn (t)
k=1 m=1 n=1
+
" N N µ Nϕ
w X X
X
#
∆ϕn g1,km Yijkmn (t)
k=1 m=1 n=1
2(x − xi )
∆xi
2(y − yj )
,
∆yj
(A.10)
and the approximate momentum in y-direction is
N µ Nϕ
Nw X
X
X
[g2,kmn Tijkmn (t) + g2w,kmn Wijkmn (t) + g2µ,kmn Mijkmn (t) + g2ϕ,kmn Pijkmn (t)]
k=1 m=1 n=1
" N Nµ
w
+
Nϕ
XXX
#
k=1 m=1 n=1
+
" N N µ Nϕ
w X X
X
2(x − xi )
∆xi
g2,kmn Xijkmn (t)
#
g2,kmn Yijkmn (t)
k=1 m=1 n=1
2(y − yj )
,
∆yj
(A.11)
where
Z
wk+ 1
Z
µm+ 1
2
g1,km =
2
wk− 1
Z
Z
2
wk+ 1
2
µm+ 1
2
g1w,km =
wk− 1
Z
2
wk+ 1
wk− 1
Z
wk+ 1
2
Z
2
wk+ 1
2
wk+ 1
Z
wk− 1
Z
2
2
2
2
µm+ 1
µm− 1
Z
2
µm+ 1
Z
2
2
g2 (w, µ, ϕ)
2(w − wk )
dw dµ dϕ
∆wk
g2 (w, µ, ϕ)
2(µ − µm )
dw dµ dϕ
∆µm
g2 (w, µ, ϕ)
2(ϕ − ϕn )
dw dµ dϕ .
∆ϕn
ϕn− 1
Z
2
ϕn+ 1
2
ϕn− 1
2
µm+ 1
µm− 1
2
ϕn+ 1
2
2
Z
g2 (w, µ, ϕ) dw dµ dϕ
ϕn− 1
µm− 1
2
wk+ 1
wk− 1
ϕn+ 1
2
2
g2µ,kmn =
Z
µm− 1
wk− 1
Z
g2ϕ,kmn =
2
µm+ 1
2
g2w,kmn =
2(µ − µm )
dw dµ
∆µm
2
wk− 1
Z
g1 (w, µ)
2
µm+ 1
2
g2,kmn =
2(w − wk )
dw dµ
∆wk
µm− 1
Z
µm− 1
2
g1 (w, µ)
2
2
g1µ,km =
g1 (w, µ) dw dµ
µm− 1
Z
2
ϕn+ 1
2
ϕn− 1
2
54
Analogously, the energy multiplied by the charge density ρh (t, x, y) is
·
¸
(∆wk )2
Wijkmn (t)
∆ϕn ∆µm wk ∆wk Tijkmn (t) +
6
k=1 m=1 n=1
#
" N N µ Nϕ
w X X
X
2(x − xi )
+
∆ϕn ∆µm wk ∆wk Xijkmn (t)
∆xi
k=1 m=1 n=1
#
" N N µ Nϕ
w X X
X
2(y − yj )
∆ϕn ∆µm wk ∆wk Yijkmn (t)
+
,
∆y
j
k=1 m=1 n=1
Nµ Nϕ
Nw X
X
X
h
i h
i
for every (x, y) ∈ xi− 1 , xi+ 1 × yj− 1 , yj+ 1 .
2
2
2
2
55
(A.12)
 0
0
advertisement

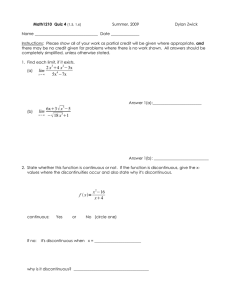


Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users