Modeling butterfly metapopulations: Does the logistic equation accurately model metapopulation dynamics?
advertisement

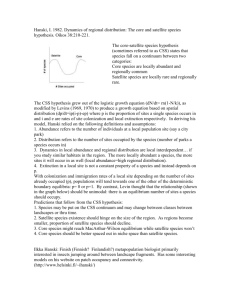
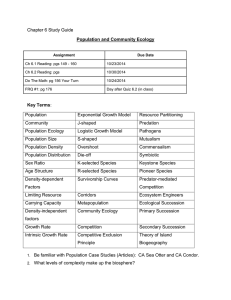
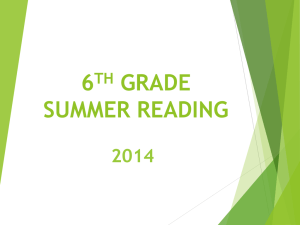
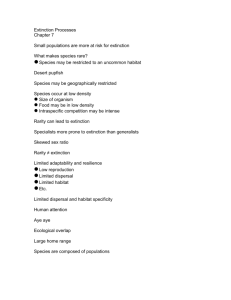
Modeling butterfly metapopulations: Does the logistic equation accurately model metapopulation dynamics? Ben Slager Introduction In 1798 Thomas Malthus constructed the theoretical framework for the logistic equation in “Essay on the Principle of Population” (Berryman 1992). In his essay Malthus argued that populations grow exponentially while resources that feed population growth stay constant or grow arithmetically (Berryman 1992). Malthus proposed that these dynamics lead to a halt in population growth when resource demand becomes greater than supply (Berryman 1992). In 1838 Verhulst translated Malthus’ arguments on population growth into the mathematical model dN/dt = aN( 1 – N/K), which is known as the logistic equation (Berryman 1992). In the logistic equation N is population density, a is the intrinsic rate of increase and K is the equilibrium density or carrying capacity (Berryman 1992). A sigmoid curve is characteristic of the logistic equation where population density rises exponentially to an asymptote called the carrying capacity. The initial uses of the logistic model investigated single species dynamics. In 1926 Volterra (and Lotka in 1932) incorporated a competition coefficient into the logistic equation and modeled species interactions through interspecific competition (Begon et al. 2006). Lotka and Volterra also modeled predator-prey interactions. To model predator-prey dynamics they deviated from the logistic form and took a mass action approach (Berryman 1992). The mass action approach assumes that population responses are proportional to biomass densities. The predator-prey mass action equations are dN/dt = aN – bNP for the prey population and dN/dt = cNP – dP for the predator population (Berryman 1992). In these equations a and d are per-capita rates of change in the absence of the other species, b and c are rates of change due to interaction and N and P are prey and predator biomass densities, respectively (Berryman 1992). In this mass action model the prey population increases without limitation. The unrealistic assumption of unchecked prey population growth is overcome by addition of a logistic term to the equation, which alters the original prey equation to dN/dt = aN( 1 – N/K) – bNP. The logistic equation has been the core or point of development for several models in ecology. One of the most recent applications of the logistic equation to ecological modeling has been in the field of metapopulation research. A metapopulation is a population of subpopulations linked together through migration (Begon et al. 2006). Implicit in this definition is the state of potential habitat in the landscape, which is usually fragmented because the overall population is made up of subpopulations linked together through migration which implies that the landscape is separated into several individual habitat patches. Subpopulations of the larger total population occupy individual habitat patches and interactions of subpopulations take place at a specific dispersal or migration rate. Below a certain dispersal threshold subpopulations in a metapopulation framework would be considered distinct populations. Above a specific dispersal threshold subpopulations in a metapopulation framework would be considered one large population. Habitat fragmentation occurs naturally and increasingly from anthropogenic sources. Habitat fragmentation is of great concern to conservationists because it can lead to an increased risk of species extinction due to smaller population sizes with increased vulnerability to environmental stochasticity (Etienne & Heesterbeek 2000). In contrast to these negative effects of fragmentation there are potential positive effects such as a greater probability of colonizing an Slager Page 1 empty patch (Etienne and Heesterbeek 2000). These opposing lines of evidence surrounding habitat fragmentation lead to the SLOSS debate. SLOSS stands for single large or several small and is in reference to the amount and size of potential habitat reserves for a species that has been targeted for conservation purposes. In order to determine an appropriate size and number of habitat patches for a species it is necessary to understand the dynamics of the metapopulation. By the 1940’s research had already led to the understanding that populations with fragmented or patchy distributions may endure evolutionary implications, for example, speciation. However, many believe that the landmark text by Andrewartha and Birch in 1954 is the true core for the development of metapopulation dynamics (Begon et al. 2006). Andrewartha and Birch were very aware of and advocated for population dynamics being seen as a continuous series of colonization-extinction events (Hanski and Gilpin 1991). Additionally, Andrewartha and Birch recognized that colonization of habitable patches in the landscape was a function of the ability of individuals to disperse to them and that this interaction left some habitable patches vacant (Begon et al. 2006). The concept of patchy distributions and the implications on population dynamics that are important for conservation purposes seem to have made small and few steps between 1954 and the late 1960’s. The earliest metapopulation models, Island Biogeography (1967) and Levins (1969) models, as well as the more recent and much more publicized Incidence Function (1994) model are rooted in the logistic equation (Hanski and Gilpin 1991). The logistic equation has been successfully used to model single species dynamics, interspecific competition and increased realism in predator-prey models. However, is it possible for the logistic equation to model a metapopulation? To what degree can a logistic based model predict real world metapopulation dynamics? How does a logistic based model compare to other methods of metapopulation modeling? To answer these questions I will first investigate the development and statistical strength of logistic based models. Then I will look at the performance of a logistic based model compared to other types of metapopulation modeling. LOGISTIC BASED MODELS Mainland-Island Before the term metapopulation arrived in the literature, provided by Levins in 1970 (Hanski and Gilpin 1991), MacArthur and Wilson developed their equilibrium theory of island biogeography (MacArthur and Wilson 1963 & Hanski and Gilpin 1991). Although MacArthur and Wilson’s theory was built with the intentions of understanding gradients of species richness, it is applicable to understanding metapopulation structures because it is based on the opposing forces of colonization and extinction (Hanski and Gilpin 1991, Begon et al. 2006). MacArthur and Wilson’s theory of island biogeography was developed in the context of real oceanic islands but also applies to terrestrial metapopulations that experience great differences in patch size (Harrison 1991). MacArthur and Wilson incorporated migration and extinction into the logistic equation in order to track the change in the fraction of islands that are occupied over time (Hanski and Gilpin 1991). The equation they used to model metapopulation dynamics was dp/dt = m(1 – p) – ep, which is analogous to the logistic equation (Hanski and Gilpin 1991). In this model m is the rate of migration, p is the proportion of patches occupied and e is the rate of extinction (Hanski and Gilpin 1991). The equilibrium value, p, is p = m/(m+e). For islands experiencing any turnover (extinctions) the equilibrium value will be positive (Hanski and Gilpin 1991). Slager Page 2 MacArthur and Wilson stressed that local populations would fall somewhere between the continuum of r and K selected species. Good colonizers that show quick population growth and high rates of colonization and extinction are r selected species (Begon et al. 2006). r-species will tend to spend large amounts of time recovering from past crashes or invading new territories (Begon et al. 2006). Conversely, K-species are poor colonizers with long term population persistence. These dynamics show low rates of colonization and extinction. Consequently, Kspecies spend most of their time near carrying capacity (Begon et al. 2006). The spatial structure of Macarthur and Wilson’s island biogeography is such that there is a single mainland and multiple islands at varying distances surrounding or adjacent to the mainland (Figure 1 and Figure 2a). This type of mainland-island structure is similar to that of Figure 1. Closed circles represent habitat patches, filled = occupied, unfilled = vacant and dashed lines are population boundaries. Arrows indicate colonization (Harrison 1991). Figure 2. A continuum of metapopulation structures (a) mainland-island, (b) intermediate and (c) Levins (Hanski & Thomas 1994). the Boorman and Levitt structure (Harrison et al. 1988). The number of individuals or patch occupancy is determined by the balance between immigration and extinction, which will vary with island area and isolation from the mainland (Hanski and Thomas 1994). From figure 3a we can see that the rate of immigration decreases as the distance from the mainland to the island (potential colonization site) increases. This relationship is due to the increased probability of finding an island close in proximity to a source of colonizers (Hanski and Gilpin 1991). The more isolated an island is the less likely a colonization event (immigration) is to occur on that island. Similarly, as the size of the island decreases there is a smaller target for potential colonizers and the immigration rate drops (Figure 3a). A smaller island that has similar habitat quality as a larger island will typically have a lower carrying capacity and contain fewer individuals in the local population. Because there are fewer individuals in the local populations of smaller islands they are more susceptible to random extinction events (Begon et al 2006). This dynamic is illustrated in figure 3b where there is an increased extinction rate in the smaller islands compared to the larger ones. Although local populations (islands) of the mainland-island metapopulation structure are subject to extinction events the metapopulation as a whole is not (Harrison et al. 1988, Hanski and Gilpin 1991, Hanski 1994). This immunity from metapopulation collapse is due to the permanent mainland source of potential colonizers (Harrison et al. 1988, Hanski and Gilpin 1991, Hanski 1994). From time to time the mainland-island metapopulation structure is confused Slager Page 3 with source-sink dynamics (Hanski and Gilpin 1991). In the mainland-island structure the differences between mainland and island are seen as stochastic while deterministic habitat differences are a distinct characteristic of source-sink population structures (Hanski and Gilpin 1991). Figure 4. Distribution of serpentine grassland habitat for butterfly populations. Arrows indicate the seven populations measured in 1987 (Harrison et al. 1988). The first full scale butterfly metapopulation study was carried out by Harrison et al. (Harrison et al. 1988) on the bay checkerspot butterfly (Euphydryas editha) in California (Hanski and Gaggiotti 2004). The bay checkerspot butterfly uses Plantago erecta as the predominate larval host plant and Orthocarpus as an alternative host (Harrison et al. 1988). The nectar resources for the bay checkerspot include Lasthenia chrysostoma, Lomatium macrocarpum, Layia playglossa and Linanthus androsaceus (Harrison et al. 1988). Host plants and nectar resources of the bay checkerspot can be found on grasslands based on serpentine soil (Harrison et al 1988). Harrison et al. identified a potential study area of 15 by 30 km on serpentine outcrops in southern Santa Clara County, California within the vicinity of Morgan Hill (Figure 4). This area was framed by natural topography and a metropolitan area. Within this study area there was one very large patch (ca. 2000 ha), named Morgan Hill, and 59 additional smaller patches of serpentine grassland ranging in area from 0.1 to 250 ha (Harrison et al. 1988). The smaller patches surrounded Morgan Hill on its entire western side (Figure 4). A survey in 1986 by Harrison et al. found that only eight of the small patches within 1.44.4 km from Morgan Hill were occupied by the bay checkerspot butterfly (Harrison et al. 1988). Alternatively, no adults were present on 15 apparently suitable habitat patches that were 4.9-20.8 km from Morgan Hill (Harrison et al. 1988). This could be explained by distance-dependent colonization indicative of the mainland-island metapopulation structure (Figures 5 & 6) (Harrison et al. 1988). The bay checkerspot population was found to be controlled by an absolute threshold of distance and habitat quality (Figure 7). Harrison et al. used the data they collected from the bay checkerspot as input into their logistic based mainland-island model to predict times to extinction for local patch populations within the metapopulation. The authors predicted that this particular metapopulation will “wink in and out” around an equilibrium population of 8-11 patches. These predicted patches had an equilibrium probability greater than 50% and included all 8 of the observed occupied patches from the survey in 1986 (Table 1). Although statistical tests indicating the strength of model predictions are missing from this study it is nonetheless impressive how similar the model predictions were in comparison Slager Page 4 with observed patch occupancy. I feel that this is a good indication that the logistic equation is capable representing metapopulation dynamics. However, having statistics to back up these rough comparisons would strengthen the argument that a logistic based model can be used to investigate metapopulation dynamics. Figure 6. Predicted probabilities of colonization over time for patches located at differing distances from the main source (MH) (Harrison et al. 1988). Slager Figure 5. Predicted yearly immigration rates as a function of distance. D´ is the dispersal constant (Harrison et al. 1988). Figure 7. Thresholds for distance from MH and habitat patch quality (Harrison et al. 1988). Page 5 Table 1. Predicted probabilities of colonization, extinction and equilibrium occupancy for potential habitat patches (Harrison et al. 1988). From Levins to Incidence Function Richard Levins coined the term metapopulation in 1970 while constructing a simple model that would investigate the dynamics of an assemblage of local populations connected to each other by occasional migration (Levins 1969, Levins & Culver 1971, Hanski and Gilpin 1991, Hanski 1994, Braak et al. 1998 and Begon et al. 2006). Levins’s original motivation and application of his metapopulation model was to a pest control situation (Levins 1969 and Hanski and Gilpin 1991). Levins’s metapopulation model didn’t experience the same early success as the island biogeographic theory (Figure 8). Hanski and Gaggiotti speculate that this may be because MacArthur and Wilson were already widely respected scientists and publishing in top tier journals (Hanski and Gaggiotti 2004). Maybe more importantly, MacArthur and Wilson’s model was attached to the species-area relationship, which allowed for ecologists to use it in their research (Hanski and Gaggiotti 2004). Levins’s metapopulation model did not provide a similar opportunity for empirical research and is probably in part responsible for it being largely shelved for 20 years (Hanski and Gaggiotti 2004). Slager Page 6 Figure 8. Number of citations in the BIOSIS database to the keywords indicated and divided by the total number of citations in a particular year (Hanski & Gagiotti 2004). Levins used dp/dt = mp(1 – p) – ep as the core of his metapopulation model, which has been demonstrated to be structurally analogous to the logistic equation (Hanski and Gilpin 1991). For this equation m is the migration rate, p is the proportion of habitat patches that are occupied and e is the extinction rate (Hanski and Gilpin 1991). In the Levins model it is assumed that habitat patches are all of equal size and that the local populations are either extinct or at carrying capacity (Hanski and Gilpin 1991) (Figure 2c). This leaves local dynamics to be largely ignored other than the presence or absence of local populations. In the Levins model, the spatial arrangement of patches is not taken into consideration and so the rate of migration from any one patch to another is the same (Levins and Culver 1971, Hanski and Gilpin 1991). Also, the probability of extinction is constant and the same for all local populations (Hanski and Gilpin 1991). This characteristic of extinction prevents the presence of a local population obtaining “mainland status” and exemption from extinction (Begon et al 2006). In the early 1990’s Ilkka Hanski relaxed many of the constraining assumptions of the Levins metapopulation model to form an intermediate model that he called the incident function model. In his model Hanski developed the use of the logistic equation from the Levins model to incorporate an increasing number of environmental inputs affecting metapopulation dynamics (Hanski and Thomas 1994). Hanski’s incidence function model is considered to be a discrete time stochastic patch occupancy model (SPOM); meaning that it takes the random demographic events into consideration while determining the presence or absence of a species in habitat patches (Hanski and Gaggiotti 2004). The incidence function model is perhaps the most well known of the SPOM’s and possibly of metapopulation models in general (van Nouhuys 2009). In the incidence function model extinction is modeled by the equation; Ei = e / Aix (Hanski 1994a). The rate of extinction is population size dependent so, Ei is a function of Ai (Hanski 1994a). This model allows for some variability in the dependence of extinction risk on patch size (Hanski 1994a). Variability is measured by X, if X > 1 there is a range of patch sizes where extinction becomes increasingly unlikely and if X < 1 there is no critical patch size and all sizes of populations and patches face a great risk of extinction (Hanski 1994a). In the extinction equation above habitat quality is assumed to be equal throughout all habitat patches, which gives them all the same equilibrium density. However, habitat quality can be modeled as linearly related to population density. To incorporate this latter characteristic area (Ai) would be replaced by quality (Qi) (Hanski 1994a). Slager Page 7 Colonization probability (Ci) is a function of the number of immigrants arriving at patch i per year (Mi) and is modeled by the equation Ci = Mi2/ (Mi2+ y2) (Hanski 1994a). Mi is largely ignored because the change in the fraction of patches occupied is quite small at equilibrium (Hanski 1994a). Colonization increases in an S shape with increasing number of immigrants and y determines the speed to equilibrium (Hanski 1994a). To determine the number of immigrants (Mi) there are a variety of components taken into consideration for the variables Si and β for the equation Mi = βSi. Si is influenced by the distance between patches moved and the survival rate of migrants over the distance moved (Hanski 1994a). β is determined by the density of individuals in patches, the rate of emigration and the fraction of emigrants moving toward a specific patch (Hanski 1994a). With these influences incorporated the equation for colonization becomes Ci = 1 / (1 + [y’ / Si]2). Here y’ describes the colonization ability of the organism where a low value of y’ negates the affects of isolation (Hanski 1994a). So, the probability of a patch being occupied is a function of patch size and it’s spatial location in terms of other occupied patches (Hanski 1994a). The essential data to construct the incidence function model are patch area, spatial locations of patches and the occupancy (presence/absence) of the present set of patches. With this set of data the remaining parameter values can be estimated and metapopulation dynamics can be predicted for most systems. To test this model Hanski collected the necessary information (described above), fit it to the incidence function model and then compared the model output to observed values (Hanski 1994a, Hanski and Thomas 1994). Hanski (1994a) gathered data for three butterfly metapopulations (M. cinxia, H. comma and S. orion) and compared observed values of critical patch areas (A0) and turnover events (colonization and extinction) to model predictions (Table 2). From observation of table 2 one will quickly notice that the predicted values of Ao of M.cinxia and H.comma are approximately half that of the observed values. However, the author believes that due to population dynamics these are reasonable estimates of critical patch area (Hanski 1994a). The author holds a similar belief for the predicted and observed turnover rates in both M. cinxia and H. comma (Table 2) (Hanski 1994a). The agreement between the model and Table 2. Results of butterfly metapopulation modeling (Hanski 1994a). observations for S. orion seem to be much better (Table 2) (Hanski 1994a). However the issue arises again that there are no supporting statistics to confirm the conclusions that were made. So, although I feel that it is reasonable to conclude that the model predictions and observations are Slager Page 8 similar it is difficult to make definitive statements about the accuracy of the model without statistical testing. Table 3. The nine parameters used for model simulation (Hanski & Thomas 1994). Hanski and Thomas added additional detail to the incidence function model by adding six environmental parameters, which in total incorporated nine parameter values for three butterfly metapopulations (M. cinxia, H. comma and P.argus) (Table 3) (Hanski and Thomas 1994). After simulation of the enhanced incidence function model the authors found that observations and predictions matched up well in terms of magnitude, particularly the fraction of patches occupied (Table 4). This round of investigation into the incidence function model included statistical evidence (t-values in table 4). From observation of the t-values in table 4 it can be seen that the majority of parameters included in the model were found to have a significant impact of the predictability of metapopulation dynamics. The statistical strength of this nine parameter model and the close relation between the observed and predicted fraction of occupied patches leads me to believe that the logistic equation is a capable base for metapopulation modeling and a potential platform to inform conservationists and ecologists alike. As an explanation for the discrepancy in predicted and observed values of occupied patches for H. comma (Table 4) the authors suggested that the metapopulation potentially was not in equilibrium and thus throwing off the predicted values (Hanski and Thomas 1994). The assumption that the metapopulation is at an equilibrium state may draw the most criticism to the incidence function model (Baguette 2004). It is not that other models are free from this critique, but rather the popularity of the incidence function model brings more attention to it (Baguette 2004 & Hanski 2004). Slager Page 9 Based on the success of statistical testing and the close correspondence between predicted and observed patch occupancy I conclude that the incidence function model serves as a reliable tool for metapopulation modeling. A benefit of this model is that it can be made as simple or complex as the data allow (Hanski and Gilpin 1991). This characteristic of the incidence function model makes it more accessible to conservationists that may not have multiple years of data available or the amount of time required to derive equations. Additionally, it is relatively straightforward to manipulate some of the assumptions underlying the structure of the model to better fit a target species, making this model applicable to most any organism (Hanski et al. 2000). Table 4. Comparison of observed and predicted effects of isolation and patch area on patch occupancy and local density. (t-values are included in the brackets) (Hanski and Thomas 1994). MODEL COMAPARISONS Structured Metapopulation Model A structured metapopulation model can incorporate a variety of parameters but central to this type of model is local population size. In Schtickzelle and Baguette (2004) the authors created a structured model to investigate the metapopulation dynamics of the bog fritillary butterfly. At the core of their structured model were population growth rates and dispersal ability of the bog fritillary butterfly. The authors included two additional descriptive components to their model, time and space. A time structure component was included with the addition of seasonal weather information for each year. Spatial structure was added into the model by incorporating information about patch location. The authors used data available from a 10 year field study of the bog fritillary butterfly as input for commercial software (RAMAS/GIS), which set the parameters for the metapopulation model. The resulting metapopulation model was run for 1000 simulations in order to illustrate the long term metapopulation dynamics of the bog fritillary. The results of the 1000 simulations were presented in comparison to the observational field data without statistical testing (Table 5). The authors only commented on the results in terms of the correspondence between observed and model predicted values of population size, similar to what we have previously encountered with the island biogeographic model and the Slager Page 10 first investigation of the incidence function model presented in this paper. Hanski (2004) has pointed out that structured simulation models are nearly impossible to statistically validate (Hanski 2004). Additionally, he points out that it is inappropriate to validate a model through rough comparison of the same empirical data that were used to set the model parameters (Hanski 2004). Although there is an appropriate time and place for the use of simulation models, in general I believe that due to it’s ability to perform and the outcome of statistical analysis of the incidence function model, it is a much more robust method for developing models of metapopulation dynamics than the structured model presented here. Table 5. Model validation through comparison of observed and predicted population size (NPL) distributions (Schtickzelle & Baguette 2004). Table 6. Model validation through comparison of observed and predicted data-set parameter estimates (Schtickzelle & Baguette 2004). Individual Based model An individual based model was constructed by Heino and Hanski (2000) that incorporated 3 models (biological, statistical and long term), which collaborated to predict the metapopulation dynamics of Melitaea diamina. The biological model was based on a landscape containing many habitat patches of different sizes and spatial qualities (Hanski et al. 2000). Slager Page 11 Immigration and emigration were seen as patch area dependent, while migration mortality was based on isolation of the focal patch (Hanski 2000). The statistical model was constructed around the dependent assumptions of migration and patch size as well as mortality and patch isolation (Hanski 2000). The previous two models set the parameters for the third model, the long term model. This final model forced out the metapopulation dynamics (Heino & Hanski 2001). However, this third model is the incidence function model and is the source of my doubts about the individual based approach seen here. The results of the individual based metapopulation model illustrated similar dynamics to those of the observed Melitaea diamina metapopulation, as well as to the results of the incidence function model (Table 7). As mentioned previously, Hanski (2004) pointed out in a critique of Schtickzelle and Baguette’s (2004) structured model, it is inappropriate to validate a model’s results by comparing them to the empirical data that they came from. Similar to this I think that it is inappropriate to compare the results of essentially the same model bearing two separate names. To me, this individual based model is the incidence function model but presented with an alternative way to parameterize the data. Because the last step of the individual based model is to run the data through the incidence function model I believe these results are further evidence that the incidence function approach is a well proven model. However, I feel that nothing is really proven here about the ability of the individual based model to represent metapopulation dynamics. Table 7. Comparison of the properties of the incidence function model and the individual-based model for Melitaea diamina. (The observed patch occupancy was 0.37) (Values in parentheses are standard errors) (Heino & Hanski 2001). Conclusions From review of the literature I feel that although I am confident in saying the incidence function model has been empirically tested and is statistically robust, not all logistic based models are. The Levins model posed a problem with being empirically tested and the statistics were missing from the predictions of the island biogeogrpahic model. Although these models were a necessary bridge to the incidence function model, I feel they are no better of a conservation tool than the individual based metapopulation model or the structured model. The individual based metapopulation model made accurate predictions of metapopulation dynamics but this was brought about by use of the incidence function model. To me, what this evidence shows is that not only is the incidence function model a great predictor of metapopulation dynamics but that the individual based model may be an alternative way to parameterize it. This alternative method may enable conservationists to use data previously collected or provide a simpler method of collecting the appropriate data. However, by calling this model something other than the incidence function model is misleading. Slager Page 12 The structured model experienced a similar barrier as the island biogeographic model and the initial presentation of the incidence function model, it is difficult to rigorously test and leaves validation up to rough comparison. Perhaps in some cases a rough comparison would be satisfactory. However, in this particular case the model predictions were compared to the observed data that set the model parameters to begin with. In a circular situation like this it seems that only strong statistical testing is appropriate to validate the model. All metapopulation models are not equally capable of modeling metapopulation dynamics. The Levins model was unable to be empirically tested, while the island biogeographic and structured models were unable to be statistically tested. However, from further development of the logistic based models the incidence function model was developed and eventually made to be statistically tested and shown to accurately represent metapopulation dynamics. References Akçakaya, H.R. 2000. Viability analysis with habitat-based metapopulation models. Population Ecology. 42: 45-53. Baguette, M. 2004. The Classical metapopulation theory and the real, natural world: a critical appraisal. Basic and Applied Ecology 5: 213-224. Begon, M., C.R. Townsend and J.L. Harper. 2006. Ecology: From individuals to ecosystems. 4th Edition. Wiley-Blackwell, Oxford, 738 pp. Berryman, A.A. 1992. The origins and evolution of predator-prey theory. Ecology. 73: 15301535. Braak, C.J.F., Hanski, I. & Verboom, J. 1998. The incidence function approach to modeling of metapopulation dynamics. In: Modeling spatio-temporal dynamics in ecology, (eds. Bascompte, J. and Solé, R.V.). Austin, TX: Landes Biosciences, pp 167-188. Etienne, R.S., Heesterbeek, J.A.P. 2000. On optimal size and number of reserves for metapopulation persistence. Journal of Theoretical Biology. 203: 33-50. Hanski, I. 1985. Single-species spatial dynamics may contribute to long-term rarity and commonness. Ecology. 66: 335-343. Hanski, I. 1994a. A practical model of metapopulation dynamics. Journal of Animal Ecology.63: 151-162. Hanski, I. 1994b. Patch-occupancy dynamics in fragmented landscapes. Trends in Ecology and Evolution. 9: 131-135. Hanski, I. 1998. Metapopulation dynamics. Nature. 396: 41-49. Hanski, I. 2004. Metapopulation theory, its use and misuse. Basic and Applied Ecology. 5: 225229. Slager Page 13 Hanski, I. and Gaggiotti, O.E. 2004. Ecology, Genetics, and Evolution of Metapopulations. Elsevier Academic Press. London, UK, 696 pp. Hanski, I. and Gilpin, M. 1991. Metapopulation dynamics: brief history and conceptual domain. Biological Journal of the Linnean Society.42: 3-16. Hanski, I. and Ovaskainen, I. 2003. Metapopulation theory for fragmented landscapes. Theoretical Population Biology. 64: 119-127. Hanski, I. and Thomas, C.D. 1994. Metapopulation dynamics and conservation: A spatially explicit model applied to butterflies. Biological Conservation. 68: 167-180. Hanski, I., Alho, J. & Moilanen, A. 2000. Estimating the parameters of survival and migration of individuals in metapopulations. Ecology. 81: 239-251. Hanski, I., Kuussaarri, M. & Nieminen, M. 1994. Metapopulation structure and migration in the butterfly Melitaea cinxia. Ecology. 75: 747-762. Hanski, I., Pakkala, T., Kussaarri, M., & Guangchun, L. 1995. Metapopulation persistence of an endangered butterfly in a fragmented landscape. Oikos. 72: 21-28. Harrison, S. 1991. Local extinction in a metapopulation context: an empirical evaluation. Biological Journal of the Linnean Society. 42: 73-88. Harrison, S. 1994. Metapopulations and conservation. In: Large Scale Ecology and Conservation Biology (eds. Edwards, P.J., May, R.M. and Webb, M.R.). 35th Symposium of the British Ecological Society. Blackwell, Oxford, pp. 111-128. Harrison, S., Murphy, D.D. & Ehrlich, P.R. 1988. Distribution of the bay checkerspot butterfly, Euphydryas editha bayensis: Evidence for a metapopulation model. The American Naturalist. 132: 360-382. Harrison, S. and Taylor, A.D. 1997. Empirical evidence for metapopulation dynamics. In: Metapopulation biology: ecology, genetics and evolution (eds. Hanski, I. and Gilpin, M.) Academic Press, Lodon, UK. pp. 27-42. Heino, M. and Hanski, I. 2001. Evolution of migration rate in a spatially realistic metapopulation model. The American Naturalist. 157: 495-511. Hill, J.K., Thomas, C.D. and Lewis, O.T. 1996. Effects of habitat patch size and isolation on dispersal by Hesperia comma butterflies: Implications for metapopulation structure. Journal of Animal Ecology. 65: 725-735. Levins, R. 1966. The strategy of model building in population biology. American Scientist. 54: 421-431. Slager Page 14 Levins, R. 1969. Some demographic and genetic consequences of environmental heterogeneity for biological control. Bulletin of the Entomological Society of America. 15: 237-240. Levins, R. and Culver, D. 1971. Regional coexistence of species and competition between rare species. Proceedings of the National Academy of Science. 68: 1246-1248. Lewis, O., Thomas, C.D., Hill, J.K., Brookes, M.I., Crane, T.P.R., Graneau, Y.A., Mallet, J.L.B. and Rose, O.C. 1997. Three ways of assessing metapopulation structure in the butterfly Plebejus argus. Ecological Entomology. 22: 283-293. MacArthur, R.H. and Wilson, E.O. 1963. An equilibrium theory of insular zoogeography. Evolution. 17: 373-387. Moilanen, A. and Hanski, I. 1998. Metapopulation dynamics: Effects of habitat quality and landscape structure. Ecology. 79: 2503-2515. Nieminen, M., Siljander, M. and Hanski, I. 2004. Structure and dynamics of Milataea cinxia metapopulations. In: On the wings of checkerspots: a model system for population biology. (eds. Ehrlich, P.R. and Hanski, I.) Oxford University Press, pp. 63-91. Neve, G., Barascud, B., Hughes, R., Aubert, J., Descimon, H., Lebrun, P. and Baguette, M. 1996. Dispersal, colonization power and metapopulation structure in the vulnerable butterfly Proclossiana eunomia (Lepidoptera: Nymphalidae). Journal of Applied Ecology. 33: 1422. Schtickzelle, N. and Baguette, M. 2004. Metapopulation viability analysis of the bog fritillary butterfly using RAMAS/GIS. Oikos. 104: 277-290. Van Nouhouys, S. 2009. Metapopulation ecology. In: Encyclopedia of Life Sciences (ELS). John Wiley & Sons, Ltd: Chichester. Zalucki, M.P. and Lammers, J.H. 2010. Dispersal and egg shortfall in monarch butterflies: what happens when the matrix is cleaned up? Ecological Entomology. 35: 84-91. Slager Page 15