DOUBLE-CANTILEVER MICRO-RELAY WITH INTEGRATED HEAT SINK FOR HIGH POWER APPLICATIONS
advertisement

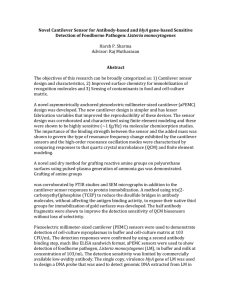
DOUBLE-CANTILEVER MICRO-RELAY WITH INTEGRATED HEAT SINK FOR HIGH POWER APPLICATIONS Fatih M. Ozkeskin1* and Yogesh B. Gianchandani1,2 Department of Mechanical Engineering, University of Michigan, Ann Arbor, USA 2 Department of Electrical Engineering and Computer Science, University of Michigan, Ann Arbor, USA *Presenting Author: ozkeskin@umich.edu 1 Abstract: This paper reports an electrostatically actuated double-cantilever micro-relay for high power DCapplications. Micro-relays with platinum-rhodium and stainless steel contacts were micromachined from foils and integrated with micromachined aluminum heat sinks. A stacked structure allowed electrical isolation of the contact actuation cantilever from the one that provides electrical contact. The heat sinks were used for forced air cooling with a mini-fan. Micro-relays with 130 V of turn-on voltage and 2.5 mm2 active area accommodate DC current levels >2.5 A. Keywords: MEMS Switch, Microrelay, On-device heat sink, Cantilever INTRODUCTION Electromechanical micro-relays are widely used for a number of applications including automotive control circuitry and test equipments [1]. High current carrying capacity and small size is frequently sought in such applications. Lithographic microfabrication techniques have been explored to address these needs for many years [2]. For example, an electrostatic micro-relay with gold contacts was reported to allow 0.4 A of DC current [3]. Another group reported a magnetically actuated micro-relay with gold contacts that could switch a 1.2 A DC load [4]. Although gold has low resistivity and high resistance to surface oxides, has also low hardness (1-2 GPa) which renders micro-relays with gold contacts prone to failure at lower DC currents [5]. The choice of contact metals for micro-relays is inherently limited by lithographic microfabrication techniques which provide restricted access to metal alloys and rely more on sputtered thin films. Microelectrodischarge machining (µEDM) provides a manufacturing method for bulk metal foil based micro devices with feature sizes down to 5 µm. Metal foil patterning is possible in serial mode with a wire electrode, as well as in batch mode with a lithographically patterned electrode, acting as cookiecutter type tool to machine features in parallel [6]. Platinum-rhodium (Pt-Rh) is a chemically inert and mechanically robust hard metal alloy that is used for high quality crucibles. It has higher hardness (~10 GPa) than pure platinum, comparable resistivity and higher melting point [7]. These properties make Pt-Rh alloy a good contact metal option for micro-relays with high current carrying capability. A µEDM`ed all-metal micro-relay directly assembled on printed circuit board (PCB) was reported earlier [8]. This paper presents a substantially more sophisticated micro-relay, utilizing a double-cantilever structure with Pt-Rh or stainless steel 316L (SS316L) bulk foil contacts and micromachined on-device Al heat sinks to demonstrate high-current handling capability without compromising device footprint. DESIGN The device is a 3-terminal switch; it employs a double-stacked cantilever structure. A contact cantilever (400x1400 µm2) bridges signal lines when pushed down by an actuation cantilever (1200x2100 µm2) that is located above it. A paddle at the distal end of the actuation cantilever acts as a pull-down electrode and provides electrostatic actuation when biased with respect to the ground electrode underneath (Fig. 1). The contact cantilever is suspended orthogonally with respect to the signal line. Two alignment posts anchor it to the PCB. It has a recessed region of 2 µm height, located over the signal line to provide with an initial contact gap. The actuation cantilever is designed to be directly anchored on the PCB substrate. A stand-off element which extends from the tip of the paddle prevents pull-in of the paddle to the ground electrode beneath it. The gap between the standoff tip and the substrate is designed to be 7 µm, i.e. 3 µm smaller than the interelectrode gap across the actuation beam paddle and ground electrode to ensure shorting does not occur. A through hole located near the anchor on the actuation cantilever prevents contact with the alignment posts, whereas one in the middle accommodates subsequent placement of a microsphere. A thermally conductive sapphire microsphere (Edmund Optics, 300 µm diameter) is situated on the contact beam. It fits tightly in a hole in the middle of the actuation cantilever. The microsphere mechanically couples the contact and actuation cantilever and acts as a dielectric material in between, electrically isolating them. It performs as a thermal conductor to distribute contact induced heat to the heat sink. It also provides a single point of contact between contact and actuation cantilevers alleviating any assembly imperfections. An aluminum heat sink (500x500x500 µm3) is located above the actuation beam. A through hole at the base of the heat sink, concentric with the middle hole on the actuation beam, supports the microsphere and provides a heat dissipation path from contacts to the heat sink fins. Duralco 4703) (Fig. 2c). The flatness of the cantilevers was maintained by monitoring beam height with a displacement sensor (Keyence LK-G). The sapphire microsphere was inserted through the perforation in the actuation cantilever and attached to the contact cantilever underneath by thermally conductive epoxy The heat sink was placed on top of the actuation cantilever, surrounding the microsphere, and was secured by thermally conductive epoxy (Fig. 2d). Fig. 1: Exploded view of double cantilever-PCB assembly. Gold alignment posts hold the contact beam over gold-coated copper traces on PCB. The actuation beam pushes the contact beam via thermally conductive microsphere. Heat sink is integrated atop. The 2.5 mm2 active area is defined by the actuation cantilever size. (a) FABRICATION/ASSEMBLY Cantilevers and Heat Sink Contact cantilevers were µEDM’ed from both stainless steel SS316L and Pt-Rh (80:20) 50 µm thick stock foil. Cantilevers were machined down to 30 µm final thickness; two perforations of 300 µm diameters were positioned in anchor regions for attachment to the PCB via alignment posts. Actuation cantilevers were µEDM’ed from hardened Al (3003) using 250 µm thick stock foil. The paddle section, middle section and anchor sections were reduced in thickness to 30 µm, 120 µm and 230 µm, respectively. Similar to contact cantilever, 300 µm diameter perforations were machined on anchor and middle sections for subsequent alignment and microsphere assembly. The heat sinks were µEDM’ed from Al (3003) using 500 µm thick stock foil. A perforation (300 µm diameter) was machined at the base of the heat sink to accommodate microsphere. Thermally conductive sapphire microspheres (300 µm diameter) were used. Printed Circuit Board A standard 1.6 mm thick FR-4 constituted the PCB substrate (Advanced Circuits). Metal interconnect traces of 90 µm thickness Cu were chosen for high current ratings (up to 4 A for 300 µm wide signal lines). In such PCBs, a 4 µm thick Ni was used as adhesion layer on Cu base and 0.15 µm thick outer gold layer was selected as contact surface. Through holes formed by vias were positioned for subsequent assembly of the cantilevers. Assembly Gold wire posts (400 µm height; 300 µm diameter), were tightly fitted into PCB vias of the same diameter (Fig. 2a). Conical tips allowed easy insertion and assembly. The contact cantilever was assembled onto the posts and held in place by thermally conductive epoxy (Aavid Thermalloy) (Fig. 2b). Subsequently, the actuation cantilever was assembled on top of contact cantilever and attached to the substrate using high temperature epoxy (Cotronics (b) (c) (d) Fig. 2: Assembly sequence showing: (a) floating anchor with alignment posts inserted. (b) Contact cantilever aligned on top of posts and anchored with epoxy. (c) Actuation cantilever directly placed on PCB substrate. Stand-off tip prevents electrostatic pull-down. (d) Microsphere inserted into the hole on top beam, secured with epoxy. Heat sink placed by aligning the center hole around the microsphere, fixed with epoxy. ELECTRICAL PERFORMANCE The test circuit (Fig. 3a-b) used separate power supplies as inputs for the cantilever actuation voltage (VG) and line current (ION). The current source was limited to 10 V compliance. The voltage VISO was monitored for isolation and current leakage in case of pull-in or ground electrode short. Under normal operation, there was no current flow across RISO; hence VG and VISO were the same. The voltage VFLOAT was tracked for possible current leakage to the electrically floating anchor. The signal line voltage VS was measured for varying line current to determine on-state resistance RON. RON was also characterized for increased VG. Tests were conducted in 0.2 Torr nitrogen ambient and were repeated for both Pt-Rh and SS316L contact cantilevers. (a) position anymore when the DC-bias is removed. Onstate resistance was sharply increased after around 1.3 A and 1.8 A and device failures occurred at 1.8 A and 2.6 A for SS316L and Pt-Rh contacts respectively. Fig. 4: Experimental results for change of on-state resistance with actuation voltage (ION =1 A, 0.2 Torr nitrogen). Increased VG yields higher contact force hence lower contact resistance. Pt-Rh accommodates lower resistance. (b) Fig. 5: On-state resistance RON for up to 2.6 A of line current (in 0.2 Torr nitrogen). VG was kept at 150 V. Failures due to microwelding occurred at 1.8 A and 2.6 A for SS316L and Pt-Rh devices respectively. Fig. 3: (a) Circuitry for testing; VISO and VFLOAT are for current leakage monitoring. ION and VS are to determine on-state resistance (RON). (b) Voltage transients associated with actuation. Typical turn-on voltage for micro-relays was 130 V and switching times were around 10-15 ms. Fig. 4 shows on-state resistance RON with increasing gate voltage for a constant line current of 1 A. The contact resistance was initially large when the actuation occurred around 130 V, and then reduced with higher actuation voltage due to larger contact force on the signal line. On-state resistance was around 1.5 Ω and 1.25 Ω lowest for SS316L and Pt-Rh contact cantilevers respectively. The resistance did not exhibit further diminution after around 165 V of VG. Fig. 5 shows on-state resistance with increasing line current for a constant actuation voltage of 150 V. ION was increased to the point of failure where excessive contact heats caused contact and signal line metals to first soften then microweld into each other to the point where the micro-relay would not restore its up-state THERMAL PERFORMANCE Thermal tests included evaluation of micro-relays with Pt-Rh contacts under unforced and forced air cooling conditions. Finite-element modeling was used to estimate the temperature distribution at 1 s into the on-state. The solution demonstrated effectiveness of the heat sink in suppressing contact area temperature (Fig. 6), when combined with forced cooling using a commercially available mini-fan (Sunon UF3A3). Experimental measurements of the contact area temperature were performed on the completed Pt-Rh devices in 0.2 Torr, 300 K nitrogen ambient and for 1-s on-state times. Perfluoroalkoxy insulated copper wire thermocouples were used to measure temperature. Contact area temperatures were monitored by increasing line current ION and were compared to simulation. The thermal behavior of Pt-Rh micro-relays is shown in Fig. 7. The use of forced cooling suppressed contact temperatures by more than 20%. Additionally, devices with forced cooling exhibited higher current handling (2.8 A). Experimental results were overall in good agreement with simulations. Table 1 benchmarks this work to DC MEMS relays as well as solid-state relays. While RON is larger for this work, the compactness is very competitive and the current handling is adequate for several applications. (a) CONCLUSION A micro-electrodischarge machined doublecantilever micro-relay for high power DC applications was presented. Double cantilever structure allows isolation of actuation and contact elements. A micromachined heat sink directly assembled on-device reduced contact heating for higher current ratings. Fabricated micro-relays with Pt-Rh contacts demonstrated up to 2.8 A of current rating under forced air cooling and 0.2 Torr nitrogen ambient. The micro-relays have an active area of 2.5 mm2 and provide high current rating per area compared to solidstate and MEMS counterparts. ACKNOWLEDGEMENT (b) This study is supported in part by Defense Advanced Research Projects Agency, Microsystems Technology Office (DARPA MTO) contract # W31P4Q-09-1-0009. REFERENCES [1] Fig. 6: FEA for 1s on-state time. Temperature distribution for (a) unforced (b) forced cooling (Pt-Rh contact, 1.2 Ω RON, 2 A ION, 300 K ambient, 0.22 m/s upward flow) Fig. 7: Steady state contact temperature TSS for 3terminal Pt-Rh switches subjected to unforced and forced cooling in 0.2 Torr nitrogen. Experimental data was compared with simulations. Heat management with upward forced cooling (compatible with Sunon UF3A3 mini-fan, 0.22 m/s air flow) yields lowest TSS. Table 1: Device benchmarking to solid-state and MEMS counterparts. Active area is defined by actuation electrode area for research device. Package dimensions are given for thyristor and Schottky diode. Property Wong Taylor SKKD Schottky This Study et al. et al. Thyristor Diode SS316L Pt-Rh [3] [4] [9] [10] Active area (mm²) 1.15 9.6 1302 (pk.) 303 (pk.) 2.5 2.5 Max. current (A) 0.4 1.2 45 10 1.8 2.8 I/area (A/mm²) 0.35 0.125 N/A N/A 0.72 1.12 On resistance (Ω) 0.014 0.022 0.005 0.1-0.15 1.5 1.2 Switch time (ms) 20 2.5 0.002 0.0001 10-15 10-15 Wood R, Mahadevan R, Dhuler V, Dudley B, Cowen A, Hill E, Markus K 1998 MEMS microrelays Mechatronics, 8, 5, 424–436. [2] Petersen K E 1979, Membrane switches on silicon IBM J. Res. Develop., 23, 376–385. [3] Wong J E, Lang J H, Schmidt M A 2000 An electrostatically-actuated MEMS switch for power applications Proceedings IEEE MEMS 2000 (Miyazaki, Japan 23-27 January, 2000) 633–638. [4] Taylor W P, Brand O, Allen M G 1998 Fully integrated magnetically actuated micromachined relays J. Microelectromech. S., 7, 4, 181–191. [5] Coutu R A, Kladitis P E, Leedy K D, Crane R L 2004 Selecting metal alloy electric contact materials for MEMS switches, J. Micromech. Microeng., 14, 1157–1164. [6] Takahata K, Gianchandani Y B 2002 Batch Mode Micro-Electro-Discharge Machining J. Microelectromech. S., 11, 2, 102–110. [7] http://www.platinummetalsreview.com/ Webpage accessed on May 11, 2010 [8] Ozkeskin F M, Gianchandani Y B 2010 A Hybrid Technology for Pt-Rh and SS316L High Power Micro-relays Technical Digest Hilton Head Workshop 2010, 182-185. [9] http://www.semikron.com, Webpage accessed on May 18, 2010 [10] http://www.cree.com, Webpage accessed on Jun 11, 2010