A MEMS Electrostatic Vibration-to-Electricity Energy Converter
advertisement

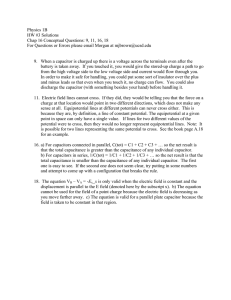
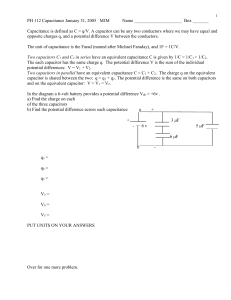
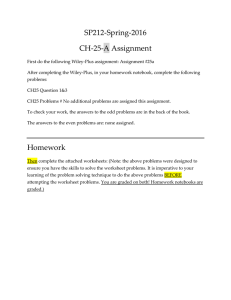
A MEMS Electrostatic Vibration-to-Electricity Energy Converter Yu-Shan Chu, Chiung-Ting Kuo and Yi Chiu Department of Electrical and Control Engineering, National Chiao Tung University 1001 Ta Hsueh Road, Hsinchu, Taiwan, R.O.C. Tel: +886-3-573-1838, Fax: +886-3-571-5998, Email: yichiu@mail.nctu.edu.tw Abstract This paper presents an electrostatic vibration-to-electric energy converter based on the micro-electro-mechanical systems (MEMS). For the 3.3 V supply voltage and 1cm2 chip area constraints, optimal design parameters were found from theoretical calculation and Simulink simulation. In the current design, the calculated output power is 32.4 µW/cm2. The device was fabricated in a silicon-on-insulator (SOI) wafer with a 200-µm-thick device layer. Measurements are being conducted. Keywords: energy conversion, energy scavenging, electrostatic, variable capacitor, SOI wafer 1. INTRODUCTION y Cmin Due to the advance of CMOS VLSI technology, the power consumption of electronic devices has been reduced considerably. This technology advance can be used in applications such as wireless sensor networks [1] or personal health monitoring [2], where remote or independent power supply is critical, to build more compact or longer-life-time modules. In particular, energy scavenging from ambient natural sources, such as vibration [3], radioisotope [4] and ambient heat [5], is attracting many recent interests. Among various approaches, electrostatic vibration-to-electric energy conversion using the micro-electro-mechanical systems (MEMS) technology is chosen in this study due to its compatibility to IC processes and the ubiquity of the energy source in nature. displacement due to vibration z y Cmax displacement due to vibration z Figure 1 Variable capacitor schematic 2. DESIGN SW1 A variable capacitor formed by an in-plane gap closing comb structure is the main component in the electrostatic energy converter [3,6], as shown in Fig. 1. The energy stored in the capacitor is increased when the capacitance is changed from Cmin to Cmax due to the external vibration. Fig. 2 shows a circuit that can be used to extract the converted energy. The variable capacitor Cv is charged by an external voltage source Vin through the switch SW1 when the Cv is at its maximum Cmax. When Cv is charged to Vin, SW1 is open and then the capacitance is changed form Cmax to Cmin due to the electrode displacement caused by vibration. In this process, the charge Q on the capacitor remains constant (SW1 and SW2 both open). Therefore, the terminal voltage on the capacitor is increased and the vibration energy is converted to the energy stored in the capacitor. When the capacitance reaches Cmin (Vmax), SW2 is closed and the charge is transferred to a storage capacitor or load. If complete discharge is assumed, the net output energy per cycle can be expressed as Vin Cv SW2 Cstor Figure 2 Operation of the electrostatic energy converter C 1 E= Vin 2 (Cmax -Cmin )( max ) 2 Cmin 1 = Vmax Vin (Cmax -Cmin ) 2 49 (1) The energy output is proportional to the difference or ratio of the variable capacitance. The output power is equal to the energy output multiplied by the vibration frequency. Therefore, the characteristics of the vibration source must be known in order to estimate the generated power. The vibration spectrum of several household appliances was measured. A typical vibration source has a peak acceleration of about 2.25 m/s2 at about 120 Hz (Fig. 3). These values will be used in the following static and dynamic analysis of the converter to find out the optimal device design and output power. Figure 4 Output power and number of finger gaps vs. initial finger gap analyzed so that the maximum allowable displacement can be achieved by the target vibration source. The electro-mechanical dynamics of the conversion process can be modeled as a spring-damper-mass system as shown in Fig. 5. The dynamic equation is && e (z)+bm (z,z)+kz= & && mz+b - my (2) where b m (z,z) & is the equivalent mechanical damping representing energy loss caused mainly by the squeezed film effect, and be(z) is the equivalent electrical damping representing the energy converted into electricity. Notice that the mechanical damping force, b m (z,z), & is a function of both the displacement z of the shuttle mass and its velocity z& [3]. The b e (z) term is the electrostaitc force induced on Figure 3 Typical vibration spectrum of a household appliance 2.1 Static Analysis In the in-plane gap closing variable capacitor, the number of finger gaps should be maximized to obtain large capacitance change. However, for limited chip area, the increased number of gaps will result in the decrease of initial finger distance and hence the capacitance variation and output power. Therefore, an optimal number of fingers, and thus the corresponding initial finger gaps, exists to produce maximum output power for the limited chip dimension. From Eq. (1) and with a typical input voltage source of 3.3 V, vibration frequency of 120 Hz, and chip area size of 1 cm2, Fig. 4 shows the calculated power output and number of finger gaps as a function of the initial gap distance, assuming the finger thickness, length, and width are 200 µm, 1200 µm and 10 µm, repsectively. The minimum gap distance is assumed to be 0.5 µm, which is controled by mechanical stops. The dimension of the fingers are choosen based on the available deep etching process capability. It can be seen that the initial finger gap has an optimal value of 25 µm for a max power output of 32.4 µW. the MEMS structure. k bm z(t) be y(t) Figure 5 Conversion dynamic model A Simulink model (Fig. 6) was built to simulate the system behavior based on Fig. 2 and Eq. (2). The charge redistribution box calculates the charge transfer process when the capacitance reaches Cmin and SW2 is open. This process represents the energy output. Due to the limited shuttle mass that can be achieved in a MEMS process, and external attached mass m was considered to increase the displacement of the variable capacitor and the energy 2.2 Dynamic analysis After the dimension of the variable capacitor was determined, the dynamics of the micro structure was 50 conversion efficiency. Fig. 7 shows the maximum displacement of the movable plates with various mass attached. The corresponding spring constant k which generates the maximum displacement zmax is also showed. With a larger mass, it is easier to reach the maximum displacement; however, under the size constraint of 1cm3, mass more than 19 gram is impractical even if tungsten is used. Actually, mass larger than 7 gram is hardly available. Thus, from the calculation shown in Fig. 7, the optimal design is obtained and listed in Table 1 with m = 5.7 gram and k = 2.8 kN/m. The output power for a 3.3 V input is 32.34 µW, which is higher than the current results in literatures. Table 1 Optimal design of the first generation device Description Width of shuttle mass Length of shuttle mass Length of finger Width of finger Shuttle mass Initial finger gap Spring constant Output power W L Lf Wf m D k Pout a) c) b) d) Figure 6 Dynamic simulation model Si Optimal value 10 mm 8 mm 1200 µm 10 µm 5.7 gram 25 µm 2.8 kN/m 32.34 µW Al Figure 8 Fabrication process: (a) define structure by Deep RIE, (b) etch oxide by HF solution, and (c) apply Al by thermal evaporation, (e) attach external mass resonant frequency to match the vibration source and improve the conversion efficiency. The fabricated device is shown in Fig. 9. The width of the finger is reduced to 6.8 µm due to the tolerance in photolithography and RIE processes. These deviations will affect the resonant frequency and other characteristics of the converter. a) Figure 7 Max displacement zmax and spring constant k for various attached mass m 3. FABRICATION A SOI wafer with a 200-µm-thick device layer was used for large capacitance change. The oxide layer and the handle wafer are 2 µm and 500 µm thick, respectively. The variable capacitor structure was first defined by deep reactive ion etching (Deep RIE) (Fig. 8(a)). After the sacrificial oxide layer was removed using the HF solution (Fig. 8(b)), aluminum was evaporated for contact (Fig. 8(c)). A steel sphere was then attached to the central plate to adjust the Center plate Mechanical stop Variable capacitor Spring Figure 9 Fabricated device: (a) SEM top view b) 51 4.2 Electrical measurement The electrical measurement was conducted using an INSTEK-LCR-816 LCR meter and a HP-4192A impedance analyzer. The measured capacitance without vibration was about 500 ~ 600 pF, while the calculated capacitance Cmin is about 50pf. A major contribution of the large measured capacitance is the parasitic capacitance Cpar between the center plate and the substrate beneath it. Width ~ 6.8µm c) Besides the parasitic capacitance, there is also a parallel parasitic conductance. The measured conductance varies from die to die with an average resistance of 2.5 kΩ. It is suspected to be caused by the residual particles left in the device after the release step. The presence of the parasitic capacitance and conductance has hindered the measurement of output power. New devices are being fabricated with the substrate underneath the combs removed to prevent residual particles. Figure 9 Fabricated device (cont’d): (b) cross section of comb fingers, and (c) overview of the fabricated converter with the attached mass 5. CONCLUSION The design and analysis of a micro vibration-to- electricity converter were accomplished. The device was fabricated in a SOI wafer. The reduced feature size of the fabricated device resulted in the decrease of spring constants. Mechanical and electrical measurement of the fabricated device was conducted. Impedance measurements showed an unwanted parasitic conductance which resulted in the failure of output power measurement. Improvement of the design and fabrication processes is being conducted. 4. MEASUREMENT 4.1 Mechanical measurement The displacement of the device without the attached mass was measured using a PROWAVE JZK-1 shaker. The measured response is shown in Fig. 10. Since the mass was not attached, the vibration acceleration was increased to 40 m/s2 for easy observation. The maximum displacement is about 10 µm at 800Hz, and the quality factor Q= ω0 ∆ω is This project is supported in part by the National Science Council, Taiwan, ROC, under the Grant No. NSC 93-2215-E-009-066. about 9.6, where ω0 is the resonant frequency and ∆ω is the resonant bandwidth shown in Fig. 10. The mass of the center plate is approximately 0.038 gram, thus the spring constant can be calculated as k=ω 2 m=960N/m . The measured spring constant is different from the calculation. The major factor of the discrepancy is the feature size shrink in the fabrication process, as shown in Fig 9. REFERENCES [1] J.M. Rabaey, et al., “Picoradio supports ad hoc ultra low-power wireless networking”, IEEE Computer, Vol. 33, pp. 42-48, 2000. [2] R. Tashiro, et al., “Development of an electrostatic generator that harnesses the motion of a living body: (use of a resonant phenomenon)”, JSME International Journal Series C, Vol. 43, No. 4, pp. 916-922, 2000. [3] S. Roundy, et al., “Micro-electrostatic vibration-toelectricity converters,” Proc. IMECE 39309, 2002. [4] R. Duggirala, et al., “Radioisotope micropower generator for CMOS self-powered sensor microsystems”, Proc. PowerMEMS, pp. 133-136, 2004. [5] T. Douseki, et al., “A batteryless wireless system uses ambient heat with a reversible-power-source compatible cmos/soi dc-dc converter”, Proc. IEEE International Solid-State Circuits Conference, pp. 2529-33, 2003. [6] C.B. William, et al., “Analysis of a micro-electric generator for microsystems”, Sensors and Actuators, A52, pp. 8-11, 1996. Figure 10 Frequency response of the device 52