H CONTROL OF SINGULARLY PERTURBED AIRCRAFT SYSTEM A Thesis by
advertisement

H2 CONTROL OF SINGULARLY PERTURBED AIRCRAFT SYSTEM
A Thesis by
Viral Shailesh Zaveri
Bachelor of Science, Wichita State University, 2009
Submitted to the Department of Electrical Engineering and Computer Science
and the faculty of the Graduate School of
Wichita State University
in partial fulfillment of
the requirements for the degree of
Master of Science
July 2011
© Copyright 2011 by Viral Shailesh Zaveri
All Rights Reserved
H2 CONTROL OF SINGULARLY PERTURBED AIRCRAFT SYSTEM
The following faculty members have examined the final copy of this thesis for form and content,
and recommend that it be accepted in partial fulfillment of the requirement for the degree of
Master of Science with a major in Electrical Engineering.
____________________________________
Ravi Pendse, Committee Chair
____________________________________
M. Edwin Sawan, Committee Member
____________________________________
Linda K. Kliment, Committee Member
____________________________________
Animesh Chakravarthy, Committee Member
iii
DEDICATION
To my parents, sister,
and my dear friends
iv
ACKNOWLEDGEMENTS
First, I would like to thank my advisor, Dr. Ravi Pendse, for attempting to introduce me
to the field of Computer Networking and providing a splendid opportunity to work with him. I
express my sincere gratitude for guiding me through the tough transition from Bachelor's to
Master's degree and explaining me the real world pros and cons. I also convey my deepest thanks
to Dr. M. Edwin Sawan, my academic advisor, for his invaluable time, insightful advices,
guidance and support through the course of this research. My further thanks to Dr. Linda K.
Kliment and Dr. Animesh Chakravarthy for their valuable time and service rendered as
committee members.
Finally, I sincerely owe my accomplishments to my parents and sister for their
encouragement, love and support without which this might have just been a dream.
v
ABSTRACT
The objective of this research is to develop an analytical approach to control two-timescale systems operating under certain noise parameters. This approach addresses two important
design criteria: augmentation of large-scale system with disturbance model and its two-timescale representation, and order reduction of the large-scale systems for reduced controller design
complexity. The problem of large-scale system with Gaussian noises is solved as the stochastic
system implementing linear-quadratic Gaussian control. Order reduction method uses singular
perturbation techniques for the simplicity of control algorithms. Control law design process for a
singularly perturbed stochastic system includes implementation and comparative analysis of
optimal, composite, and reduced controller techniques. Practical model, longitudinal dynamics of
digital fly-by-wire F-8C fighter aircraft, illustrates the validation of the proposed concepts.
vi
TABLE OF CONTENTS
Chapter
1.
INTRODUCTION .............................................................................................................. 1
1.1
1.2
1.3
1.4
2.
2.3
2.4
What is Singular Perturbation? ............................................................................... 4
Two-Time-Scale System ......................................................................................... 5
2.2.1
Time Scale Analysis ................................................................................ 6
State Transformation ............................................................................................... 7
2.3.1
Permutation .............................................................................................. 8
2.3.2
Scaling...................................................................................................... 8
Singular Perturbation Method ................................................................................. 9
STOCHASTIC CONTROL OF SINGULARLY PERTURBED SYSTEM .................... 11
3.1
3.2
3.3
3.4
3.5
4.
Background and Motivation ................................................................................... 1
Historical Perspective and Past Efforts ................................................................... 1
Objectives of the Thesis .......................................................................................... 2
Scope of the Thesis ................................................................................................. 2
TWO-TIME-SCALE SYSTEM AND SINGULAR PERTURBATION METHOD ......... 4
2.1
2.2
3.
Page
Overview ............................................................................................................... 11
Steady-State Optimal LQG Controller.................................................................. 11
3.2.1
Problem Statement ................................................................................. 11
3.2.2
Steady-State Regulator and Kalman Filter ............................................ 13
Controller Design Techniques .............................................................................. 16
3.3.1
Composite Control ................................................................................. 16
3.3.2
Reduced Control .................................................................................... 16
Singular Perturbation ............................................................................................ 16
3.4.1
Composite Control of Singularly Perturbed System .............................. 17
3.4.2
Reduced Control of Singularly Perturbed System ................................. 20
Controller Comparison Criteria ............................................................................ 21
3.5.1
Optimal Cost .......................................................................................... 21
3.5.2
Stochastic Cost ....................................................................................... 21
3.5.3
H2 Norm ................................................................................................. 22
LONGITUDINAL DYNAMICS OF F-8 AIRCRAFT..................................................... 23
4.1
4.2
4.3
4.4
Brief History ......................................................................................................... 23
Linearized Aircraft Equations of Motion .............................................................. 24
Dynamics of the Wind Disturbance Model .......................................................... 25
4.3.1
Aircraft Model Augmentation................................................................ 26
State Transformation ............................................................................................. 27
vii
TABLE OF CONTENTS (Continued)
Chapter
4.5
4.6
5.
4.4.1
Permutation ............................................................................................ 28
State Measurements .............................................................................................. 29
4.5.1
Sensor Noise Intensities ......................................................................... 29
4.5.2
State-Space Model ................................................................................. 30
Time-Scale Modeling............................................................................................ 30
4.6.1
Standard Singular Perturbation From .................................................... 31
LINEAR-QUADRATIC GAUSSIAN CONTROL OF SINGULARLY PERTURBED
AIRCRAFT MODEL........................................................................................................ 33
5.1
5.2
5.3
5.4
6.
Page
Simulation Procedure ............................................................................................ 33
5.1.1
Simulation Test Matrix .......................................................................... 34
Numerical Values for Simulation ......................................................................... 34
5.2.1
Open-Loop F-8 Aircraft Model ............................................................. 35
5.2.2
Measurement Equation .......................................................................... 36
Controller Implementation .................................................................................... 38
5.3.1
Optimal LQG Control of Full-Order Model .......................................... 40
5.3.2
Composite Control ................................................................................. 47
5.3.3
Reduced Control .................................................................................... 55
Controller Results and Comparisons .................................................................... 62
CONCLUSIONS............................................................................................................... 65
6.1
6.2
Summary of Research and Results ....................................................................... 65
Recommendations for Future Work...................................................................... 67
REFERENCES ............................................................................................................................. 68
viii
LIST OF TABLES
Table
Page
4.1
Dimensional Stability Derivatives for the Longitudinal F-8 Aircraft Model ................... 25
4.2
Row Norms of the Longitudinal F-8 Aircraft Model........................................................ 27
4.3
Open-Loop Characteristics of the Longitudinal F-8 Aircraft Model ................................ 27
5.1
Simulation Test Matrices .................................................................................................. 33
5.2
Open-Loop Eigenvalues of Time-Scaled Singularly Perturbed F-8 Aircraft Model ........ 36
5.3
Sensor Noise Intensities .................................................................................................... 37
5.4
Simulation Results for Optimal LQG Control of Full-Order Model ................................ 46
5.5
Simulation Results for Composite Control of Lower-Order Slow and Fast Subsystems . 53
5.6
Simulation Results for Reduced Control of Reduced-Order Model ................................. 61
5.7
Summary of Controller Comparison Criteria ................................................................... 64
ix
LIST OF FIGURES
Figure
Page
2.1
Example open-loop response of a TTS aircraft longitudinal dynamics .............................. 6
3.1
A typical stochastic linear dynamic system ...................................................................... 13
3.2
Block diagram of linear stochastic system with LQG controller ...................................... 15
3.3
Parallel computation of slow and fast Kalman filters for LQG control ............................ 19
4.1
NASA F-8C digital fly-by-wire test aircraft ..................................................................... 23
4.2
3-view of digital fly-by-wire F-8C crusader ..................................................................... 23
4.3
Open-loop longitudinal F-8 aircraft initial condition response......................................... 28
5.1
Closed-loop response using optimal LQG control (Case (a) and ε1 = 0.24) .................... 40
5.2
Closed-loop response using optimal LQG control (Case (a) and ε2 = 0.0336) ................ 41
5.3
Closed-loop response using optimal LQG control (Case (b) and ε1 = 0.24) .................... 42
5.4
Closed-loop response using optimal LQG control (Case (b) and ε2 = 0.0336) ................ 43
5.5
Closed-loop response using optimal LQG control (Case (c) and ε1 = 0.24) ..................... 44
5.6
Closed-loop response using optimal LQG control (Case (c) and ε2 = 0.0336) ................. 45
5.7
Closed-loop response using composite control (Case (a) and ε1 = 0.24) ......................... 47
5.8
Closed-loop response using composite control (Case (a) and ε2 = 0.0336) ..................... 48
5.9
Closed-loop response using composite control (Case (b) and ε1 = 0.24) ......................... 49
5.10
Closed-loop response using composite control (Case (b) and ε2 = 0.0336) ..................... 50
5.11
Closed-loop response using composite control (Case (c) and ε1 = 0.24) .......................... 51
5.12
Closed-loop response using composite control (Case (c) and ε2 = 0.0336) ...................... 52
5.13
Closed-loop response using reduced control (Case (a) and ε1 = 0.24) ............................. 55
5.14
Closed-loop response using reduced control (Case (a) and ε2 = 0.0336) ......................... 56
x
LIST OF FIGURES (continued)
Figure
Page
5.15
Closed-loop response using reduced control (Case (b) and ε1 = 0.24) ............................. 57
5.16
Closed-loop response using reduced control (Case (b) and ε2 = 0.0336) ......................... 58
5.17
Closed-loop response using reduced control (Case (c) and ε1 = 0.24) ............................. 59
5.18
Closed-loop response using reduced control (Case (c) and ε2 = 0.0336) ......................... 60
5.19
Maximum singular values of open-loop versus closed-loop system ................................ 62
xi
LIST OF ABBREVIATIONS
DFBW
Digital Fly-By-Wire
LQG
Linear-Quadratic Gaussian
LQR
Linear-Quadratic Regulator
TTS
Two-Time-Scale
xii
LIST OF SYMBOLS
g
Acceleration due to Gravity (ft/sec2)
α
Angle of Attack (rad)
δ
Control Vector
Rc
Control Weighting Matrix for Optimal Control
δe
Elevator Position (rad)
V0
Equilibrium Velocity (ft/sec)
τ
First Order Low Pass Filter Time Constant (sec)
ω
Frequency (rad/sec)
H2
Hardy Space
u
Incremental Velocity (ft/sec)
O( )
Magnitude to the Order of
v
Normalized Incremental Velocity (nondimensional)
J*
Optimal Cost
J
Performance Index/Cost Function
θ
Pitch Attitude Angle (rad)
q
Pitch Rate (rad/sec)
ζw
Root Mean Square Value of Vertical Gust Velocity (ft/sec)
L
Scale Length (of the turbulence) (ft)
ε
Singular Perturbation Parameter
TS
Settling Time
Rf
State Measurement Spectral Density
xiii
LIST OF SYMBOLS (continued)
μ
State Vector
Qc
State Weighting Matrix for Optimal Control
JS
Stochastic Cost
'
Time-Scaled Measurement White Noise Process
δT
Throttle Position (nondimensional)
ξ
White Gaussian Noise Due to Wind Gust
w
Wind Gust State (rad)
Φg
Wind Gust Power Spectral Density
Q0
Wind Disturbance Intensity Matrix
xiv
CHAPTER 1
INTRODUCTION
1.1
Background and Motivation
The influence of stochastic processes on a deterministic system has been a topic of
interest for many decades. So much so that many researchers in the field have dedicated a great
deal of time and energy towards advancing the boundaries of working knowledge relative to this
topic. Consequently, great strides have taken place in the past thirty years within the context of
singular perturbation theory and state-space formulation of linear systems with stochastic
processes. Realizing that performance of large-scale systems can suffer a great deal in the
presence of external disturbances, nominal model of such systems must be solved and analyzed
accounting for these noise parameters. Consequently, a step towards the optimal solution of
stochastic control for the linear-quadratic Gaussian (LQG) or H2 problem becomes imminent.
1.2
Historical Perspective and Past Efforts
Several approaches have been made for solving the stochastic control of the LQG
problem. The problem of stochastic control for two-time-scale (TTS) systems has been
extensively studied in the literature in the past thirty years. The main idea is to find statistical
properties for the stochastic processes and incorporate them in the large-scale system, exhibiting
TTS properties, for the LQG controller design. Michael Athans et al. [1] first presented the
method to augment the large-scale system with disturbance model and conducted stochastic
control of the complete F-8C aircraft model using LQG design incorporating multiple model
adaptive control method. A. H. Haddad and P. V. Kokotovic [2] analyzed the stochastic control
of the LQG problem for a TTS system and applied singular perturbation theory. They showed
that the optimal control could be approximated by the combination of a slow and fast control
1
computed in separate time scales. Treating the F-8C aircraft model from reference [1] as the TTS
system, Petar V. Kokotovic, Hassan K. Khalil, and John O'Reily [3] applied singular
perturbation technique to it and solved this LQG problem for optimal and composite control.
John L. Vian and M. Edwin Sawan [4] extended the problem of TTS F-8C aircraft model to
further investigate the H∞ and H2 norms.
1.3
Objectives of the Thesis
The control of the aircraft dynamics under the influence of wind disturbance is a
challenging task. Not only is the aircraft dynamics of very high order, but it may also have
incomplete state information and have measurement noises that need to be addressed during the
control design process. The objectives of this thesis are twofold: (1) To accurately augment the
aircraft model with the wind dynamics and transform it into singularly perturbed form to
represent the TTS system. (2) To systematically obtain lower-order models using singular
perturbation methodology and use them to design the LQG/H2 controllers to control the fullorder system in the presence of wind turbulence and state measurement disturbances, and
evaluate the effectiveness of these controllers.
The achievement of these objectives should suggest the best approach for LQG/H2
controller design for the singularly perturbed aircraft system augmented with the wind dynamics
in the presence of state measurement disturbances. To the author's knowledge, such a
comparative study of various controller design techniques for a singularly perturbed aircraft has
not been performed before and should make a significance contribution.
1.4
Scope of the Thesis
In this thesis, optimal linear-quadratic Gaussian or H2 control of singularly perturbed
systems is considered. The remainder of this thesis is organized as follows: Chapter Two reviews
2
the theoretical backgrounds for necessary conditions for the application of singular perturbation
methods, time-scale analysis, and state transformation techniques. Chapter Three presents the
stochastic control of singularly perturbed systems with white Gaussian process and measurement
noises. Kalman filter design process is explained for both slow and fast subsystems. Optimal
control, composite control, and reduced control design techniques are implemented. Chapter
Four provides all the details of the F-8 aircraft model including wind dynamics, model
augmentation, state transformation, time-scale modeling, and measurement noises. Chapter Five
essentially implements the procedural techniques discussed in Chapter Three to the real model
presented in Chapter Four, and presents evaluation of simulation results and comparative
analysis of different control techniques. Finally, the conclusions and scope for future work are
summarized in Chapter Six.
3
CHAPTER 2
TWO-TIME-SCALE SYSTEM AND SINGULAR PERTURBATION METHOD
2.1
What is Singular Perturbation?
A fundamental dilemma in the control system theory is the mathematical modeling of a
physical system. The realistic models of many systems require high-order dynamic equations
that contain small parameters such as time constants, moments of inertia, masses, resistances,
inductances, capacitances, and Reynolds number. These small parasitic parameters often increase
the dynamic order of the model.
From the control engineer's perspective, system modeling needs to be parsimonious
because the model should not be more detailed than required by the specific task. However,
enough details about the small parasitic parameters must be included to guarantee satisfactory
performance of the system while attempting to keep the dynamic order of the model as low as
possible to reduce controller complexity and avoid numerical ill-conditioning in the design
process. Engineers sometimes want to ignore small parameters in an attempt to simplify the
dynamic models. For that very purpose, singular perturbation techniques can legitimize these ad
hoc simplifications of dynamic model that are corrected for the small parameters to within a
known order of error without introducing additional numerical ill-conditioning.
A high-order system whose dimension reduces by letting a small parameter, ε, approach
zero is referred to as singularly perturbed system. Generally, a system of such type comprises
two widely separated clusters of eigenvalues resulting in the system to exhibit TTS properties. A
TTS system attributes simultaneous occurrence of "slow" and "fast" phenomena giving rise to
stiffness in the problem that leads to complexity in controller design solutions. For instance,
longitudinal dynamics of an airplane features phugoid and short period modes. These motions
4
occur simultaneously but their decay speeds are different. It is a computational burden to solve
for such large-scale systems. Evidently, system order reduction is needed, and thus the
implementation of singular perturbation method for a TTS system is encouraged because modern
control procedures are numerically ill-conditioned to provide a solution for such problems.
Considered as a boon to the control engineers, the application of singular perturbation
methodology for TTS systems has become popular as it presents with remedial features like
dimensional reduction and stiffness relief. Essentially, the singular perturbation method uses
asymptotic expansions to separate the full-order model into two reduced-order models that are
numerically well-conditioned as their eigenvalues are clustered in the same region [5]. The
resulting two separated models are the reduced ('slow') model and the boundary layer ('fast')
model. Typically, the solutions attained via singular perturbation method are more accurate and
optimal to within a specific O(ε) compared to those that ignore the small parameters.
The principal idea behind considering a large-scale system as the TTS system is to have a
systematic classification of the state variables in order to decouple them as slow and fast modes,
and be able to apply singular perturbation techniques to reduce the complexity of controller
design process.
2.2
Two-Time-Scale System
In general, a two-time-scale system possessing two widely separated clusters of
eigenvalues is represented as
x(t ) A1
z (t ) A
3
A2 x(t ) B1
u (t )
A4 z (t ) B2
(2.1)
where x t n and z t m represent the state vectors and u t q is the control vector,
and matrices Aij and Bi are of appropriate dimensionality. Note that if we associate ε with z t , it
5
will represent the equation (2.1) in the singularly perturbed form. Thus, the singularly perturbed
form is just another way to represent the general TTS system [6].
2.2.1 Time Scale Analysis
The TTS system (2.1) is such that the n eigenvalues of the system are close to the origin
(small) and the remaining m eigenvalues are far from the origin (large), thus, giving slow and
fast responses respectively. The system (2.1) can also be said to possess n dominant modes and
m non-dominant modes. For the TTS system in the form of equation (2.1), Figure 2.1 shows a
typical open-loop response.
Figure 2.1 Example open-loop response of a TTS aircraft longitudinal dynamics
The eigenspectrum e(A) of system (2.1) is arranged in the increasing order of absolute
values as follows:
e A s1 ,
, sn , f1 ,
, fm
(2.2 a)
, sn
(2.2 b)
, fn
(2.2 c)
e As s1 ,
e Af f1 ,
6
where λ denotes eigenvalues of the system, and
0 . | s1 | . . | s2 | .
. | sn | . . | f1 | . . | f2 | .
. | fm |
(2.2 d)
The system (2.1) exhibits two-time-scale property [7] if the largest of the absolute eigenvalue of
the slow eigenspectrum e(As) is much smaller than the smallest absolute eigenvalue of the fast
eigenspectrum e(Af), that yields
. | s | / | f | .
n
1
1
(2.3)
where the small, positive singular perturbation parameter, ε, is a measure of separation of time
scales. Thus, the following inequality for the TTS system (2.1) holds good:
| max ( As ) | .
. | min ( Af ) |
(2.4)
and by the norm properties of invertible matrices, (2.4) can equivalently be written as
| Af |1 .
. | As |1
(2.5)
Hence, as the inequality (2.5) suggests, the system (2.1) must be decoupled into two lower-order
models namely slow and fast subsystems.
2.3
State Transformation
To decouple a TTS physical system into two lower-order subsystems, the full-order
system, however, first needs to be in the form of equation (2.1). In practice a real physical TTS
system may have its state variables arranged in an arbitrary order and the units of the state
variables may be out of scale. Thus, a system in such form may not satisfy the following
inequalities required for it to exhibit the TTS property [6]:
|| A41 || . .
1
3 || A0 || || A2 || || L0 ||
|| A41 || .
. || A0 ||1
where A0 A1 A2 L0 and L0 A41 A3
7
(2.6)
(2.7)
This calls for the system to be transformed such that the absolute values of its eigenvalues are
arranged in increasing order as represented by expressions (2.2), and the inequalities (2.6) and
(2.7) are satisfied. A physical system can be made to exhibit TTS properties through the
transformation techniques like permutation and scaling.
Permutation re-arranges the state variables such that the first n states of the transformed
state vector correspond to the slow states and the remaining m states correspond to the fast states.
Scaling readjusts the units and reduces the norms of A41 , A0 , A2 , and L0 as much as possible.
2.3.1 Permutation
Re-arranging the state variables of a given system is done by computing norms of all the
rows [6]. The row with the lowest norm is assumed as the row corresponding to a slow state
variable, and is the first state variable appearing in the transformed state vector. Separation
between the magnitudes of the row norms generally gives a coherent idea as to how the slow and
fast state variables can be classified. Continuing this technique for all the remaining state
variables as explained in reference [6], a transformed state vector is obtained in which the first n
states correspond to the slow states and the next m states correspond to the fast states. The
permutation matrix required to re-index the state variables is defined as
P e3 , e4 , e1 , e5 , e2
(2.8)
where ei is an elementary column vector whose ith entry is 1.The state transformation is achieved
by the following equation:
Atransform PT AP
(2.9)
2.3.2 Scaling
If any one of the matrices A41 , A0 , A2 , and L0 is ill-conditioned, the conditions (2.6) and
(2.7) may not be satisfied even if the system possesses inherent TTS property [6]. Thus, diagonal
8
scaling technique is applied to the transformed system matrix, obtained in equation (2.9), to
readjust the units and reduce the norms of A41 , A0 , A2 , and L0 as low as possible. The diagonal
elements of the scaling matrix are approximately the ratio of the highest to the lowest elements
of the respective row of the system matrix and is constructed as
S diag Dn , Dm
(2.10)
where Dn and Dm are diagonal matrices of dimensions n and m, respectively. The scaled system
matrix is obtained as
Ascaled SAS 1
(2.11)
Further transformation procedures such as time-scale modeling required for transforming
the general TTS form (2.1) to standard singular perturbation form (2.12) are discussed more in
detail under Sections 4.6.
2.4
Singular Perturbation Method
As pointed out earlier, associating ε with z t to the system, given by equation (2.1),
gives the deterministic linear time-invariant singularly perturbed continuous system as
x t A1 x t A2 z t B1u t
(2.12 a)
z t A3 x t A4 z t B2u t
(2.12 b)
Assuming that the equation (2.12) is in standard form, that is A41 is non-singular and a Hurwitz
matrix; and 0 < ε ≤ 1.
Aforementioned, the purpose of the singular perturbation method is to reduce the
complexity of controller design process. In order to do so, the system given by equation (2.12) is
decoupled into two lower-order subsystems where system response can be computed in two
9
separate time scales satisfying the inequality (2.5). To obtain the reduced-order model, a slow
subsystem with fast modes eliminated, we set ε = 0 in (2.12 b),
zs t A41 A3 xs t B2us t
(2.13)
and substitute (2.13) into (2.12 a) to get
xs t A0 xs t B0us t
(2.14)
A0 A1 A2 A41 A3
(2.15)
B0 B1 A2 A41B2
(2.16)
where
This approach is termed as the quasi-steady state approximation [5], and (2.14) is called the
quasi-steady state model because z, whose velocity z g / can be large when ε is small,
rapidly decays to the solution of (2.13), is the quasi-steady state from of (2.12 b).
For deriving the fast subsystem, slow variables are assumed to be constant during fast
modes, that is, z 0 and xs is constant. From equations (2.12) and (2.13), we have
z t zs t A4 z t zs t B2 u t us t
(2.17)
Let z f t z t zs t and u f t u t us t , the fast subsystem is obtained as
z f t A4 z f t B2u f t
(2.18)
Equations (2.14) and (2.18) clearly highlight the task of computing the response of the
system (2.12) in two separate time scales, and thereby reducing the complexity of controller
design process. The following chapter extends the results from this section for the stochastic
form of system (2.12) for the LQG problem.
10
CHAPTER 3
STOCHASTIC CONTROL OF SINGULARLY PERTURBED SYSTEM
3.1
Overview
Today's advanced and complicated mechanisms of the modern industry often features
high-order dynamic systems operating in the presence of external disturbances that requires
utmost attention towards the stability and performance of such systems. Moreover, in such
dynamic systems lower and higher frequencies co-exist that make the controller design process
complicated. Thus, this calls for the system's order degradation for the simplification of control
laws. As reviewed in the previous chapter, a reduced-order model can simply be obtained by
diminishing the effects of fast dynamics, and this chapter explains how this approach can easily
be realized for the system operating under disturbances.
This chapter demonstrates the method to apply singular perturbation theory to the
stochastic control for LQG problem. Control law design process includes implementation and
comparative analysis of optimal, composite, and reduced control techniques. It also defines
controller comparison criteria based on which the above control techniques are analyzed.
3.2
Steady-State Optimal LQG Controller
Standard LQG compensation is a combination of optimal observer via Kalman filter and
state feedback control via linear-quadratic regulator (LQR). The separation principle allows for
this independent computation primarily because the observer dynamics are sufficiently faster
than the plant dynamics [8].
3.2.1 Problem Statement
Consider that the stochastic linear time-invariant singularly perturbed continuous system
with corresponding measurements is given below as
11
x(t )
x(t )
z (t ) A. z (t ) B.u (t ) G.w(t )
(3.1 a)
x(t )
y t C.
v t
z
(
t
)
(3.1 b)
A1
where A A3
A2
B1
G1
A4 , ..B B2 , ..G G2 , ..C C1 C2
which is equivalent to
x t A1 x t A2 z t B1u t G1w t
(3.1 c)
z t A3 x t A4 z t B2u t G2 w t
(3.1 d)
y t C1 x t C2 z t v t
(3.1 e)
where x t n and z t m are the slow and fast states respectively, u t q is the control
input, y t p is the observed output, ε is a small parameter, w t r1 and v t r2 are
system and measurement disturbances, respectively, assumed to be mutually uncorrelated, zeromean, stationary Gaussian white noise stochastic processes with intensities Q0 > 0 and Rf > 0.
Covariance functions of w t and v t are given by
E w t wT Q0 t
(3.2)
E v t vT R f t
(3.3)
where Q0 is symmetric positive semi-definite and Rf is symmetric positive definite. The steadystate linear-quadratic Gaussian control problem is to find a control law of the form
u t f y .......... t
that minimizes the performance index
12
(3.4)
tf
1
J ycT t yc t uT t Rcu t dt
2 t0
(3.5)
where yc t l is the controlled output to be regulated to zero, which is given by
x(t )
yc t M .
z (t )
(3.6 a)
yc t M1 x t M 2 z t
(3.6 b)
or equivalently
where M M1
M 2 . Equations (3.1) are visualized in the block diagram form in Figure 3.1.
Figure 3.1 A typical stochastic linear dynamic system
3.2.2 Steady-State Regulator and Kalman Filter
For the stochastic problem (3.1), as described in the previous section, we now design the
optimal feedback control via LQR and a state estimator via Kalman filter based on the approach
suggested in reference [3].
As long as
A, B
and
A, G
are stabilizable as well as
A, C
and
A, M
are
detectible, then a control law that minimizes the performance index, J, is given by
u t KC1 xˆ t KC2 zˆ t
13
(3.7)
where K C1 and K C2 are regulator gain matrices given by
KC1 Rc1 B1T P1 B2T P2
(3.8 a)
KC2 Rc1 B1T P2 B2T P3
(3.8 b)
where P1, P2, and P3 comprise the solution of the algebraic Riccati equation as given below
0 PA AT P PBRc1BT P M T M
(3.9)
which is similar to standard LQR Riccati equation
0 AT P PA PBRc1BT P Qc
(3.10)
with Qc M T M and P is the symmetric matrix.
x̂ t and ẑ t are the steady-state optimal estimates given by Kalman filter
xˆ t A1 xˆ t A2 zˆ t B1u t K f1 y t C1xˆ t C2 zˆ t
(3.11 a)
zˆ t A3 xˆ t A4 zˆ t B2u t K f y t C1xˆ t C2 zˆ t
(3.11 b)
2
where K f1 and K f2 are Kalman filter gain matrices given by
K f1 1C1T 2C2T R f 1
(3.12 a)
K f2 .T2 C1T 3C2T R f 1
(3.12 b)
where Σ1, Σ2, and Σ3 comprise the solution of the algebraic Riccati equation given below as
0 A AT CT Rf 1C Q f
(3.13)
which is similar to the solution of Lyapunov equation with Q f GQ0GT and Σ is symmetric.
Thus, the closed-loop LQG controller is a dynamic, output feedback, model based
compensator composed of the regulator and filter equations
xˆ t A1 B1KC1 K f1 C1 xˆ t A2 B1KC2 K f1 C2 zˆ t K f1 y t
14
(3.14 a)
zˆ t A3 B2 KC K f C1 xˆ t A4 B2 KC K f C2 zˆ t K f y t
1
2
2
2
2
(3.14 b)
Figure 3.2 shows the complete block diagram of the stochastic system with the LQG controller.
The poles of the regulator
det sI A BKC 0
(3.15 a)
det sI A K f C 0
(3.15 b)
and the poles of the filter
are guaranteed to be stable (asymptotically stable). It should be noted the poles of the
compensator might not always be stable, however, the poles of the closed-loop system (3.16) is
guaranteed to be stable.
det sI A BKC K f C 0
(3.16)
In fact, the closed-loop poles of the LQG system are simply the poles of the regulator and the
poles of the filter, both of which are guaranteed to be stable by the virtue of separation principle.
Figure 3.2 Block diagram of linear stochastic system with LQG controller
15
3.3
Controller Design Techniques
In contrast to the optimal LQG control approach for full-order model, this section
introduces two other control design methods namely composite control and reduced control
implemented to the lower-order slow and fast models derived from the full-order stochastic
system.
3.3.1 Composite Control
uc t us t u f t
(3.17)
where uc t is the composite control composed of us t and u f t , the slow and fast control
components respectively. The state equations now become
x t A1 x t A2 z t B1 us t u f t G1w t
(3.18 a)
z t A3 x t A4 z t B2 us t u f t G2 w t
(3.18 b)
3.3.2 Reduced Control
ur t us t
(3.19)
where ur t is the reduced control consisting only the slow control component, us t . The state
equations now become
3.4
x t A1 x t A2 z t B1us t G1w t
(3.20 a)
z t A3 x t A4 z t B2us t G2 w t
(3.20 b)
Singular Perturbation
As Sections 3.3.1 and 3.3.2 suggests, we now apply the singular perturbation technique to
the stochastic system given by equations (3.1) to obtain the lower-order slow and fast subsystems
to separately evaluate for the slow, us t , and fast , u f t , control components.
16
3.4.1 Composite Control of Singularly Perturbed System
As reviewed in Chapter Two, singular perturbation methodology entirely decouples the
system into two separate subsystems. So it is appropriate to also consider the decomposition of
the feedback controls such that us (t ) and u f (t ) are separately designed for the slow and fast
subsystems (2.14) and (2.18), respectively.
Using the technique presented in Section 2.4, we set ε = 0 in equation (3.18 b) and solve
for the resulting algebraic equation for z t
z t A41 A3 x t A41B2 us t u f t A41G2 w t
(3.21)
The slow subsystem is obtained by replacing z t by its steady-state component.
xs t A0 xs t B0 us t u f t G0 w t
(3.22)
where A0 ( A1 A2 A41 A3 )......B0 ( B1 A2 A41B2 )......G0 (G1 A2 A41G2 )
And the output equation is obtained as
y t C0 xs t D0 us t u f t S0 w t v t
(3.23)
where C0 (C1 C2 A41 A3 )......D0 (C2 A41B2 )......S0 (C2 A41G2 )
The fast variable z t is defined as z t zs t z f t . Thus, the fast subsystem is
obtained by removing the slow bias from z t and y t . Deducing from (3.21), the slow bias of
the z t is given by
zs t A41 A3 x t B2us t
(3.24)
Thus, the fast components of z t and y t , denoted by z f t and y f t respectively, are
defined by
17
z f t z t A41 A3 x t B2us t
(3.25)
y f t y t C1 x t C2 A41 A3 x t B2us t
y t C0 x t D0us t C2 z f t v t
(3.26)
Computing the derivative z f t with zs t treated as constant, we obtain the fast subsystem as
z f t A4 z f t B2u f t G2 w t
(3.27)
y f t C2 z f t v t
(3.28)
Similarly, the controlled output equation yc t is obtained by substituting z t zs t z f t in
equation (3.6) and can be expressed as
yc t M 0 xs t N0us t M 2 z f t
(3.29)
where M 0 (M1 M 2 A41 A3 )......N0 (M 2 A41B2 )
The controlled output equation decomposes as the sum of a slow component M 0 xs t N0us t
and a fast component M 2 z f t . Thus, the corresponding performance indexes for the slow and
fast subsystems respectively are given by
tf
T
1
J s M 0 xs t N 0us t M 0 xs t N 0us t usT t Rus t dt
2 t0
(3.30)
tf
1
J f zTf t M 2T M 2 z f t uTf t Ru f t dt
2 t0
(3.31)
As the problem of stochastic system (3.1) has been re-defined completely in terms of
slow and fast subsystems, we now need to obtain decoupled slow and fast filter equations for
each corresponding subsystem. The filter equations are solved separately in terms of slow and
fast control components. For the slow control us t KCs xˆs t
18
xˆs t A0 xˆs t B0 us t u f t K fs y t C0 xˆs t D0 us t u f t
(3.32)
and for the fast control u f t KC f zˆ f t
zˆ f t A4 zˆ f t B2u f t K f y f t C2 zˆ f t
(3.33)
f
Considering the composite control uc t us t u f t KCs xˆs t KC f zˆ f t , we have
xˆs t A0 xˆs t B0uc t K f s y t C0 xˆs t D0uc t
(3.34)
Replacing with y t C0 xˆs t D0us t instead of y f t in zˆ f t equation
zˆ f t A4 B2 KC K f C2 zˆ f t K f y t C0 xˆs t D0 KC xˆs t
f
f
f
s
Figure 3.3 represent the equations (3.34) and (3.35) in the block diagram form.
Figure 3.3 Parallel computation of slow and fast Kalman filters for LQG control
19
(3.35)
3.4.2 Reduced Control of Singularly Perturbed System
Referring back to the primary objective of this research, which is to reduce the controller
design complexity, the application of singular perturbation techniques helps to achieve this mark.
In the previous Section 3.4.1, we could compute the response of the system in two separate time
scales. However, this approach falls short of our target, as we still need to carry out the
cumbersome computations for the fast subsystem that bears only the non-dominant modes of the
system. The singular perturbation methodology also facilitates to solve only for the reducedorder (slow subsystem) model accounting for the fast dynamics while not explicitly solving for
the fast control.
Design process for reduced control is similar to the approach used for composite control.
We set ε = 0 in the equation (3.20 b) and solve for the steady-state model of z t . Thus, the
reduced-order model and the output equation are obtained as
xr t A0 xr t B0ur t G0 w t
(3.36)
y t C0 xr t D0ur t S0 w t v t
(3.37)
where A0, B0, G0, C0, D0, and S0 are defined in Section 3.4.1.
Eliminating the fast bias from the z t zs t z f t and substituting in the controlled output
equation (3.6) for yc t , we have
yc t M 0 xr t N0ur t
(3.38)
Unlike the composite control, note that the controlled output equation (3.38) this time only
consists of the slow component. Hence, the performance criterion of the reduced control is
clearly dictated by the slow dynamics only.
20
tf
T
1
J r M 0 xr t N 0ur t M 0 xr t N 0ur t urT t Rur t dt
2 t0
(3.39)
As the problem of stochastic system (3.1) has been re-defined completely in terms of
slow control, we now need to obtain filter equations for the reduced-order model. For the
reduced control ur t KCr xˆr t the reduced-order filter equation is given as
xˆr t A0 xˆr t B0ur t K fr y t C0 xˆr t D0ur t
3.5
(3.40)
Controller Comparison Criteria
After devising the optimal, composite, and reduced control laws for the singularly
perturbed stochastic system represented by equations (3.1), these different controller techniques
are subjected to comparative analysis to evaluate for their effectiveness toward the performance
of the overall system.
3.5.1 Optimal Cost
The optimal cost of using a controller in terms of initial state conditions is given by
1
J* t0 x0T P t0 x0
2
(3.41)
The initial conditions of the system are known. Therefore, the equation (3.41) allows
computation of the optimal cost before the control is actually applied to the system, or even
before the optimal gain K(t) is computed. If the cost is too high, it allows the engineer to select
different weighting matrices Qc, Rc, and P(tf) in the performance index and evaluate various
designs.
3.5.2 Stochastic Cost
For the stochastic problem, LQG approach has been implemented incorporating the
Kalman filters. The key role of Kalman filter is to handle sensor noise and estimate the unknown
21
states. Thus, the main goal of Kalman filter is to reduce the mean-square error of the state
estimates. For this reason, we use another controller comparison parameter namely stochastic
cost function for the system with incomplete state information [9], which is defined below as
tf
tf
1
1
J S trace. PGQ0GT dt trace. KCT Rc KC dt
2
2
t0
t0
(3.42)
where P is the solution of the algebraic Riccati equation as given in equations (3.9) or (3.10), and
Σ is the error covariance solved by the equation (3.13).
3.5.3 H2 Norm
Kalman filter is also evaluated for minimizing the maximum singular value for different
control techniques. In other words, we comapre the H2 norm of the closed-loop system for all
three controller design techniques. The transfer function of the closed-loop system is given
below as
T (s, K ) Ccl sI Acl Bcl
1
(3.43)
Thus, the H2 norm of T s, K is defined by [8]
1
|| T s, K ||2 .
2
1
......
2
1
2
trace
d
T
(
j
,
K
)
T
(
j
,
K
)
*
1
2
T ( j , K ) d
i 1
r
(3.44)
2
i
(3.45)
where T * ( j, K ) is the complex conjugate transpose of T ( j, K ) , i denotes the i th singular
value, and r is the rank of T ( j, K ) .
22
CHAPTER 4
LONGITUDINAL DYNAMICS OF F-8 AIRCRAFT
The practical model used in this research is the longitudinal model of F-8 aircraft, twotime-scale in nature, for the evaluation of various controller design techniques.
4.1
Brief History
In 1972, F-8C Crusader fighter aircraft as shown in Figures 4.1 and 4.2 (taken from
reference [10]) served as the testbed for NASA's first digital fly-by-wire (DFBW) technology to
validate the principal concepts of all-electric flight control systems. The DFBW project was
conducted jointly by Dryden Flight Research Center and Langely Research Center [10].
Figure 4.1 NASA F-8C digital fly-by-wire test aircraft
Figure 4.2 3-view of digital fly-by-wire F-8C crusader
23
4.2
Linearized Aircraft Equations of Motion
The longitudinal model of the F-8 aircraft in terms of incremental velocity, u (ft/s), and
two control inputs, δe and δT, presented by Elliot [11], is given below as
q M q
d u 0
dt 1
1
Mu
M
Xu
X
Zu
Z
0
0
0 q M e
g u X e
0 Ze
0 0
0
X T e
0 T
0
(4.1)
where q, α, θ, δe, and δT are respectively incremental pitch rate (rad/s), angle of attack (rad), pitch
angle (rad), elevator position (rad) and throttle position (nondimensional). M( ), X( ), Z( ) denote
the longitudinal dimensional stability derivatives. The linear model (4.1) is the result of
linearization of the full nonlinear equations [12] about the trim flight conditions.
The linearization of the longitudinal model of the F-8 aircraft in terms of straight, steady
state flight with velocity V0 and one control input δe [3] yields
q M q
d v 0
dt 1
1
M vV0
M
Xv
X
V0
Z vV0
Z
0
0
0 q M e
X
g
v
e
V0
V0 e
0 Z e
0 0
(4.2)
where v is the nondimensional, normalized incremental velocity (v = u/V0) and g is the
acceleration due to gravity, 32.2 ft/s2. Like references [3] and [4], the control vector in the
equation (4.2) neglects throttle position, δT, as one of the control inputs because at any rate a
pilot flying the aircraft would be able to control the speed of the aircraft himself.
The reference [11], an overview of the NASA-F8 control program, also provides the
longitudinal stability derivatives (Table 4.1) required for the formulation of the longitudinal
model (4.2). The flight conditions used for the analytical simulations, at also which the
longitudinal stability derivatives are computed, are Flight Condition Number 11 referring to the
24
Table 1 in reference [1] that corresponds to the altitude of 20,000 ft, Mach Number of 0.6
(airstream velocity V0 = 620 ft/s), and trim angle of attack α0 = 0.078 rad.
TABLE 4.1
DIMENSIONAL STABILITY DERIVATIVES FOR THE LONGITUDINAL F-8 AIRCRAFT
MODEL
State
Variables
q
v
α
θ
δe
q
Mq = -0.49
Mv = 0.00005
Mα = -4.8
-
Mδe = -8.7
v
-
Xv = -0.015
Xα = -14.0
-
Xδe = -1.1
α
-
Zv = -0.00019
Zα = -0.84
-
Zδe = -0.11
θ
-
-
-
-
-
The deterministic linear model (4.2) is converted to stochastic form in the design process
by augmenting it with the additional wind gust state and introducing disturbances in the state
measurements.
4.3
Dynamics of the Wind Disturbance Model
As stated in Section 4.2, a continuous-time wind gust state variable w(t) is included in the
longitudinal dynamics to study the effects of wind turbulence during a steady-state flight. The
turbulence spectrum provided in [11] is an approximate model to that of von Kármán model, as
given in [13] and extensively analyzed in [14] for turbulent conditions, and the Haines
approximation [1]. The wind disturbance model, like the aircraft model, changes with different
flight conditions; while, only the Flight Condition Number 11 is used through the analyses. The
vertical gust power spectral density used to derive the dynamics of the wind disturbance model
[1] to incorporate into a real-time simulation is given below as
g
w2 L
4
2
V0 4 VL
25
0
(4.3)
where Φg is gust power spectral density and ω is the frequency (rad/s). L is the scale length (ft)
and has the values of 200 at sea level, 2,500 above 2,500 ft of altitude and linearly interpolated in
between. ζw is root mean square value of vertical gust velocity (ft/s) and has the values of 6, 15,
30 ft/s for nominal, cumulus cloud cover, and thunderstorm conditions, respectively. For the
chosen flight conditions and assuming the intermediate case of cumulus cloud cover, L = 2,500 ft
and ζw = 15 ft/s.
To obtain a state variable model for the wind gust, a normalized state variable w(t) (rad)
is used for the longitudinal dynamics. The dynamics of the wind disturbance model [1] are given
below as
2 w
V
w t 2 0 w t
t
LV0
L
(4.4)
where the wind state w(t) is the result of the first-order system driven by continuous white noise
ξ(t) with zero mean and unity covariance function as
E t t
(4.5)
4.3.1 Aircraft Model Augmentation
To simulate the influence of wind disturbance on the aircraft during steady-state flight
conditions, wind dynamics (4.4) are included into the longitudinal aircraft model (4.2). The wind
state w(t) affects the longitudinal dynamics in the same manner as the angle of attack [1]. Thus,
the augmented longitudinal model of the aircraft is given below as
M
q q
v 0
d
1
dt
1
w 0
M vV0
M
0
Xv
X
V0
g
V0
Z vV0
0
Z
0
0
0
0
0
0
M q M e
X
X
V0
v V0e
Z Z e t
e
0
0
V
2 L0 w 0
26
0
0
0 t
0
2 w
LV0
(4.6)
4.4
State Transformation
As previously discussed in Section 2.2, the longitudinal model (4.6) is required to
transform to represent the TTS form (2.1). The row norms and the open-loop characteristics of
augmented model (4.6) are given in the Tables 4.2 and 4.3.
TABLE 4.2
ROW NORMS OF THE LONGITUDINAL F-8 AIRCRAFT MODEL
State Variables
q(t)
v(t)
α(t)
θ(t)
w(t)
║Ai║(i = matrix row)
6.8060
0.0628
1.5573
1.0000
0.4960
TABLE 4.3
OPEN-LOOP CHARACTERISTICS OF THE LONGITUDINAL F-8 AIRCRAFT MODEL
State Variables
Eigenvalues
Short-Period Mode -0.6656 ± j2.1821
Damping (ζ) Undamped Frequencies(ωn rad/s)
0.2918
2.2829
Phugiod Mode
-0.0069 ± j0.0765
0.0892
0.0768
Wind Gust State
-0.4960
1.0000
0.4960
Comparing the row norms (Table 4.2), distinctly v and θ can be grouped as the slow
variables, and α and q as the fast variables. However, it is difficult to form a judgment on the
response of the wind state based solely on its norm as it may simply be influenced by the
intensity of the vertical gust or turbulence. Alternatively, observation of the open-loop
eigenvalues in Table 4.3 gives an apparent idea of the behavior of the wind state. Subsequently,
the wind gust state w(t) is chosen to be a fast variable, but slower than α and q based on the row
norms and decay of the eigenvalues.
27
4.4.1 Permutation
Once the behavior of the state variables is identified, an appropriate permutation matrix is
built as P e5 , e1 , e4 , e2 , e3 such that the transformed model (4.7) has its first n variables (v and
θ) as slow and the remaining m (w, α and q) as fast. Following the approach mentioned in
Section 2.3.1, the augmented model (4.6) can be rewritten to represent the TTS form (2.1) as
v Xv
0
d
w 0
dt
Z vV0
q
M vV0
g
V0
X
V0
X
V0
0
0
0
0
2
V0
L
0
0
Z
Z
0
M
M
0 v X e
V0
1 0
t
0 w 0 e
Z
1
e
M q q M e
0
0
2 w
t
LV0
0
0
(4.7)
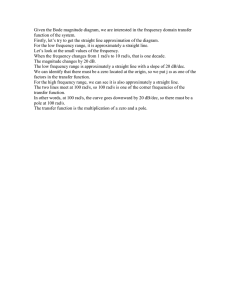
The open-loop response to a unity initial condition (Figure 4.3) of the TTS longitudinal
model (4.7) distinctly characterizes the slow and fast variables.
2
1
0
-1
-2
-3
0
0.5
1
1.5
2
2.5
Time (sec)
(rad)
v (nondim.)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
2
1
0
-1
-2
-3
0
10
20
30
40
50
Time (sec)
60
70
80
90
100
Figure 4.3 Open-loop longitudinal F-8 aircraft initial condition response
28
4.5
State Measurements
Modern flight data recorders measure almost all the flight stability parameters that a
flight controls engineer can think of. These flight records give details of the aircraft performance
that are based on in-flight instruments and sensors accounting for noise. The control program
carried out by Elliot [11] layouts the procedure for sensor modeling used during the F-8 control
law studies. Table III in reference [11] lists out sensor noise observed in aircraft flight records,
which are modeled through shaping white noise of proper spectral density with a first order lowpass filter. Elliot points out that these sensor noises are result of many correlated sources of
disturbances like aeroelasticity, engine vibrations, instrument noise, etc. Thus, the values that
Table III [11] offers are conservative if an analysis accounts for these disturbances separately.
The usage of these values in this research would mean putting the controller techniques to the
test as in this case, like Elliot cautioned, the analyses accounts only for the influence of wind
gust on the aircraft system.
Suppose that all the states for the longitudinal model (4.2), which are velocity v, pitch
angle θ, angle of attack α, and pitch rate q, are measured. Then the measurement equation
including intensity matrix with white noise processes, i , for the augmented model (4.7) can be
written as
1
0
y
0
0
v
0 0 0 0 1
2
1 0 0 0
w
3
0 0 1 0
4
0 0 0 1
q
(4.8)
4.5.1 Sensor Noise Intensities
Abovementioned, Table III in reference [11] provides sensor noise parameters such as
first order low-pass filter time constant, (sec), and intensity, , to model the white noise
29
processes. Each of the measurement noise processes i in equation (4.8) is reasonably modeled
as white noise processes with spectral densities given as 2 i2 i [3].
4.5.2 State-Space Model
The TTS system (4.7) and the output equation (4.8) together can be represented as the
general state-space model as
ATTS . BTTS . GTTS .w
(4.9 a)
y CTTS . v
(4.9 b)
where [v... ...w... ...q]T is the state vector, e T is the control vector, w (t ) is
T
the disturbance and v is the measurement noise. Since the TTS system (4.9) is in the nonstandard
form, it must be transform into the standard singularly perturbed form (2.12) so the controller
design techniques developed in Chapter 3 can be applied.
4.6
Time-Scale Modeling
Two well-known time-scale characteristics that are associated with the longitudinal
motion of an airplane are slow "phugiod mode" and fast "short-period mode." To exhibit these
characteristics, the TTS model (4.9) first needs to be scaled and then transformed into the
standard singularly perturbed form (2.12) as per the Proposition 6.1 presented in reference [3].
Considering the magnitude of system matrix elements in equation (4.7), they can be
grouped as either O(1) or O(ε). Elements Z , M , M q , 2
X ,
g
V0
,
X
V0
, ZV0 , MV0 ..
V0
L
are O(1) while the quantities
.1 . This suggests that ε need to be introduced as the ratio of the
largest of the small quantities to the smallest of the large quantities. For this purpose, the system
matrix of equation (4.7) is rewritten as F ( ) F0 F and partitioned into 2 × 2 matrices as
given below
30
F
F 11
F21
F12 0 F12
F 0
11
F22 0 F22
F21 0
(4.10)
where
Xv
F11
0
0
F21 ZvV0
M vV0
XV
,
....
.
F
0
12
0
0
g
V0
2 VL0
0
0 , .....F22 Z
0
M
X
V0
0
0
Z
M
0
1
0
1
Mq
due to which the non-zero elements of F11, X , g V0 , and F21, Z V0 , M V0 , are
scaled to the order O(1) while the elements X V0 of F12 is O(ε) and 2(V0 L) of F22 is O(1).
This results in the change of time scale from t to t' = tω0 and allows the singular perturbation
parameter to be chosen as 0 1 , where ω0 and ω1 are undamped natural frequencies of
phugoid and short-period modes, respectively.
4.6.1 Standard Singular Perturbation From
After the system matrix of equation (4.9) is correctly scaled, we now need to rightly
transform it into the singularly perturbed form represented by the equations (2.12) to meet the
objectives of this research. By following the procedure in Section 1.7 of [3], we form a
transformation matrix T such that
T [ P.....Q]T
(4.11)
where the P and Q are chosen as P [ I 2 ..... F12 F221 ] and Q [0.....I3 ]
Using the transformation technique T , the system (4.8) is transform into
A. B. G.w
(4.12 a)
y C. v
(4.12 b)
31
Finally, letting [ x...z ]T and u , we have the standard singularly perturbed form
x A1 x A2 z B1u G1w
(4.13 a)
z A3 x A4 z B2u G2 w
(4.13 b)
y C1 x C2 z v
(4.13 c)
where
A1 F11 F12 F221F21.............A2 A11F12 F221
A3 F21...............................A4 F22 F21F12 F221
(4.14)
Similarly, the transformations for control matrix, B, and disturbance matrix, G, are
carried out based on the same outline. Moreover, to account for the effect of changing the time
scale on the white noise processes, and to match the problem statement (3.1), the time-scaled
white noise intensities are factored by the phugiod mode undamped natural frequency ω0. Thus,
the intensities i entering the noise intensity matrix will be as
i 2 i2 i0
(4.15)
So far, the practical model, longitudinal dynamics of F-8 aircraft model, has been
augmented with wind dynamics, accounted for the measurement sensor noises, and completely
been transformed into the singularly perturbed form to represent a TTS system. Thus, the model
is now ready on which the various control techniques presented in Chapter Three can be
implemented, and based on the controller comparison criteria, their performance will be
evaluated.
32
CHAPTER 5
LINEAR-QUADRATIC GAUSSIAN CONTROL OF SINGULARLY PERTURBED
AIRCRAFT MODEL
5.1
Simulation Procedure
In a typical large-scale system not all the states are generally measured, which calls for
the complete LQG design incorporating Kalman filters to handle sensor errors and to reconstruct
the state variables that are not available for measurements. Varying the number of states
available for measurements and feedback, thus, essentially dictates the flight simulations in this
research, and accordingly changes the measurement matrix, C, and the intensity matrix, Rf. For
the different cases listed in Table 5.1 controller comparison criteria outlines which controller
techniques can be considered as the best approach for the system.
TABLE 5.1
SIMULATION TEST MATRICES
Case 1
Case 2
Singular Perturbation
Parameter
Availability of State
Measurements
ε1 = 0.24
(a)... v... ... ...q
(b)... v... ...q
(c)... ...q
ε2 = 0.0336
(a)... v... ... ...q
(b)... v... ...q
(c)... ...q
In addition to the case of varying the number of available state measurements, the
simulations also account for the two different cases of ε values. The simulations carried out in
this research are for two different sets of test matrices which are defined in Table 5.1.
33
5.1.1 Simulation Test Matrix
This section presents reasoning for the selection of the test matrix as seen in Table 5.1.
•
State Measurements: As discussed in section 4.5, Reference [11] gives sensor noise
parameters for all the longitudinal and lateral states of the aircraft estimated from the flight
records. Thus, assuming that all the states are available for measurement and feedback,
hence, case (a) [v θ α q]T is selected. During the stochastic study of the complete F-8
model [1], Athans et al. devised LQG approach due to the fact that angle of attack and
sideslip angle could not be measured, in addition to the wind state. Hence, the case (b) [v θ
q]T is selected. Lastly, the case (c) [θ q]T is selected to compare the results of this research
to the results obtained in reference [3].
•
Singular Perturbation Parameter - ε: As reviewed in Sections 2.2.1 and1 4.6, the
singular perturbation parameter, ε, can be found in several different ways: (i) ratio of the
largest of the absolute eigenvalue of the slow eigenspectrum e(As) and the smallest absolute
eigenvalue of the fast eigenspectrum e(Af), (ii) ratio of the largest of the small quantities to
the smallest of the large quantities of a system matrix, and (iii) ratio of the undamped
natural frequencies of phugoid and short-period modes, ω0 and ω1, respectively. Cases (i)
and (iii) yields the same value for ε, hence, only (iii) is considered for the simulation
purpose. Thus, based on approach explained in (ii) and (iii), we have two different cases of
ε values which are ε1 = 0.24 and ε2 = 0.0336.
5.2
Numerical Values for Simulation
The variants of the open-loop model such as augmented, transformed, and time-scaled
models and the measurement matrices along with the sensor noise intensities are presented in this
section.
34
5.2.1 Open-Loop F-8 Aircraft Model
•
Deterministic Model: Model (4.2) based on the values in Table 4.1 and V0 = 620 ft/s.
4.8
0 q 8.7
q 0.49 0.031
v 0
0.015 0.0226 0.0519 v 0.0018
d
e
0.1178 0.84
0 0.11
dt 1
0
0
0 0
1
•
(5.1)
Augmented Stochastic Model: Stochastic model (4.6) after augmenting model (4.2)
with the wind dynamics (4.4).
4.8
0
4.8 q 8.7
q 0.49 0.031
0
v 0
0
0.015 0.0226 0.0519 0.0226 v 0.0018
d
1
0.1178 0.84
0
0.84 0.11 e 0 t (5.2)
dt
0
0
0
0 0
1
0
w 0
0.0136
0
0
0
0.496 w 0
•
Transformed Model: Equation (5.4) is the result of permutation (Section 4.4.1) and
diagonal scaling (Equations 2.11 and 5.3) in order to lower the norms of A41 , A0 , A2 , and L0 as
low as possible and satisfy the inequalities (2.6) and (2.7). The diagonal scaling matrix used is
S diag 1, . 12 , .5, . 12 ,. 101
(5.3)
that helped to lower the norms of A41 , A0 , A2 , and L0 and satisfy the inequalities that are
required to exhibit TTS properties, which are shown below as
|| A41 || . 2.0291, . || A0 || . 0.1054, . || A2 || . 5, . || L0 || . 0.0116
2.0291 ≤ 2.0383 →
inequality (2.6) is satisfied
9.4911 →
inequality (2.7) is satisfied
2.0291
v 0.0150 0.1039
0
0
d
w 0
0
dt
0
0.0589
q 0.0031
0
0.0045 0.0452
0 v 0.0018
0
0
0
0
5.00 0
0.4960
0
0 w 0 e 0.0136 t (5.4)
0.0840 0.8400 5.00 0.11
0
0
0.0960 0.9600 0.49 q 8.7
35
•
Time-Scaled Model: After carrying out the transformation techniques presented in
section 4.6, model (5.4) is transformed into time-scaled, singularly perturbed form given by
(4.13), where 0.0336 and
0.4426 3.0886
A1
, ... A2
0
1.6874
0
A3 1.7514
0.0922
0
0
0
0
0
2.8466
0.0072
2.4699
,
0.0731
0
0
0.4960
, ... A 0.0840 0.8403 4.9974 ,
4
0.0960 0.9600 0.4899
(5.5)
0
0.0136
0.3247
0
B1
, ...B2 0.11 , ...G1 , ...G2 0 ,
6.9100
0
8.7
0
The open-loop eigenvalues for the F-8C aircraft model (5.5) in the time-scaled, singularly
perturbed form are given in Table 5.2 for both the εi (i = 1, 2) values.
TABLE 5.2
OPEN-LOOP EIGENVALUES OF TIME-SCALED SINGULARLY PERTURBED F-8
AIRCRAFT MODEL
Open-loop
Eigenvalues
ε1 = 0.24
ε2 = 0.0336
-0.6755 ± j2.1623
0.7567 ± j1.8983
-0.0206 ± j0.3220
-1.6431 ± j1.9733
-0.4960
-0.4960
5.2.2 Measurement Equation
As per reference [3] and using the numerical values for the stability derivatives from
Table 4.1, measurement for the pitch angle, θ, is modeled as
M
Z
q
Z M q M
Z M q M
36
(5.6)
0.921022. 0.161179.q
(5.7)
Thus, the measurement matrices for three different cases along with the time-scaled noise
intensities for all the sensors (Table 5.3) are as follows:
•
Case (a): [v θ α q]T
1
0
C1
0
0
•
0
1
, ...C2
0
0
0
0
0
0
0
0.921022
1
0
1 0 0 0
0 0 0
0.161179
2
(5.8)
, ...R f
0 0 3 0
0
1
0 0 0 4
0
Case (b): [v θ q]T
0
0
1 0 0
1 0
0
C1 0 1 , ...C2 0 0.921022 0.161179 , ...R f 0 2 0
0 0 3
0
1
0 0
0
•
(5.9)
Case (c): [θ q]T
0 1
C1
, ...C2
0 0
0
0.921022
0
0
0.161179
0
...R f 1
1
0 2
TABLE 5.3
SENSOR NOISE INTENSITIES
Sensor
Time-Scaled Intensity ( i )
Velocity (v)
0.2558 × 10-6
Pitch Angle (θ)
0.2995 × 10-6
Angle of Attack (α)
0.0211 × 10-6
Pitch Rate (q)
0.9361 × 10-6
37
(5.10)
5.3
Controller Implementation
Different control design techniques presented in Chapter Three are implemented on the
longitudinal F-8 aircraft model presented in Chapter Four. For that purpose, this section presents
the controller performance index for the F-8C aircraft model and defines the appropriate
weighting matrices. According to references [1] and [3], the aircraft controller performance
index is chosen to be as
f
2
2
q2
2
1 v2
J 2 2 2 2 2 dt
max
2 t0 vmax max max qmax
t
(5.11)
where vmax 0.1, ..max max max 0.1.rad , ..and..qmax 0.1.rad / s .
Comparing the performance index defined in Chapter Three, represented by equation (3.5), to the
one in standard form, we have
yc
1
1 x
y
C
0.1
0.1 z
(5.12)
Reference [1] expresses concern about the saturation of the elevator deflection rate, which is
0.435 rad/s for the F-8C, and hence, 1/(0.435)2 has appropriately been selected as the weighting
for the elevator control. Thus, the performance index expressed in the standard form is given by
tf
1
J xT t Qc x t u T t Rcu t dt ,
2 t0
where, ..Qc M T M .......with, ..M
and, ...Rc
1
0.12
1
C
0.1
(5.13)
.......with, .. 1 (0.435) 2
where Qc is nondiagonal, positive semi-definite and Rc is positive definite. The cost function
weighting matrices Qc, shown for all the cases, and Rc entering the simulation are given by
38
•
Case (a): [v θ α q]T
100.0
0
Qc
0
0
0
•
0
0
100.0
0
0
0
92.1022
16.1179
0
0
0
0
100.0
0
0
0
92.1022
16.1179
0
0
0
0
0
0
0
100.0
0
0
0
0
0
92.1022
16.1179
0
0
92.1022 16.1179
0
0
84.8282 14.8449
14.8449 102.5979
(5.15)
92.1022 16.1179
0
0
184.8282 14.8449
14.8449 2.5979
(5.16)
0
0
Case (c): [θ q]T
Qc
•
(5.14)
0
Case (b): [v θ q]T
100.0
0
Qc
0
0
0
•
92.1022 16.1179
0
0
184.8282 14.8449
14.8449 102.5979
0
0
0
Control Weighting Matrix:
Based on the definitions in equation (5.13), initial value for Rc is selected as follows:
Rc 528.4714
(5.17)
However, to satisfy the performance criteria and achieve a stable closed-loop system for all the
controllers and various cases, the Rc value for final simulations is selected to be as below
Rc 52847.14
(5.18)
The analytical simulations are carried using the software MATLAB® developed by The
MathWorks, Inc, version 7.11 (R2010b) [15].
39
5.3.1 Optimal LQG Control of Full-Order Model
The various controller cases described in the previous Sections 5.1 - 5.3 are implemented
on the full-order model (5.5). Figures 5.1 - 5.6 describe the response of the full-order closed-loop
system under the influence of the disturbance for various state measurements and εi (i = 1, 2)
cases.
•
Case 1 (a):
6
4
2
0
-2
-4
-6
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
6
4
2
0
-2
-4
-6
0
5
10
15
20
Time (sec)
Figure 5.1 Closed-loop response using optimal LQG control (Case (a) and ε1 = 0.24)
40
25
•
Case 2 (a):
3
2
1
0
-1
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
3
2
1
0
-1
0
5
10
15
20
25
Time (sec)
Figure 5.2 Closed-loop response using optimal LQG control (Case (a) and ε2 = 0.0336)
Comparing Figures 5.1 and 5.2, the case of ε2 yields a little more oscillatory response than that in
the case of ε1. However, both the responses tend to go stable in less than 6 seconds even in the
presence of highly oscillatory wind gust state.
41
•
Case 1 (b):
2
1.5
1
0.5
0
-0.5
-1
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
2
1.5
1
0.5
0
-0.5
-1
0
5
10
15
20
Time (sec)
Figure 5.3 Closed-loop response using optimal LQG control (Case (b) and ε1 = 0.24)
42
25
•
Case 2 (b):
1
0.5
0
-0.5
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
1
0.5
0
-0.5
0
5
10
15
20
25
Time (sec)
Figure 5.4 Closed-loop response using optimal LQG control (Case (b) and ε2 = 0.0336)
Comparing Figures 5.3 and 5.4, the case of ε2 makes the system achieve steady state faster by
almost 4 seconds in the case when α is not measured.
43
•
Case 1 (c):
2
1.5
1
0.5
0
-0.5
-1
0
0.5
1
1.5
2
2.5
Time (sec)
(rad)
v (nondim.)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
2
1.5
1
0.5
0
-0.5
-1
0
10
20
30
40
50
Time (sec)
60
70
80
90
Figure 5.5 Closed-loop response using optimal LQG control (Case (c) and ε1 = 0.24)
44
100
•
Case 2 (c):
1.5
1
0.5
0
-0.5
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
1.5
1
0.5
0
-0.5
0
5
10
15
20
25
Time (sec)
Figure 5.6 Closed-loop response using optimal LQG control (Case (c) and ε2 = 0.0336)
Comparing Figures 5.5 and 5.6, the case of ε2 significantly yields better system response when
only θ and q are measured. In the case of ε2 the steady state response is achieved in only less than
4 seconds while in the case of ε1 the system response takes more than 50 seconds to reach the
steady state.
45
TABLE 5.4
SIMULATION RESULTS FOR OPTIMAL LQG CONTROL OF FULL-ORDER MODEL
Simulation Cases
ε1 = 0.24
(a)
(b)
(c)
Regulator Poles
-92.6128
-0.1454
-0.8177 ± j 1.4222
-0.4960
-77.5411
-0.1344
-0.7731 ± j 1.6305
-0.4960
-70.8799
-0.0304
-0.8640 ± j 1.2037
-0.4960
Filter Poles
-1.0912 ± j 2.6176
-0.0697 ± j 0.3079
-1.7614
-0.7294 ± j 2.2235
-0.2784 ± j 0.1086
-0.5419
-0.7423 ± j 2.2379
-0.1102 ± j 0.2545
-0.7877
Closed-loop Poles
-92.6247
-3.6098
-0.2998 ± j 1.2988
-0.2506
-77.6921
-0.8783 ± j 1.3992
-0.3922
-0.5461
-71.0120
-0.0458
-0.8274 ± j 0.7761
-1.0263
Optimal Cost (J*)
469.6866
368.4921
413.8070
Stochastic Cost (JS )
0.1482
0.1975
0.1365
H2 Norm
0.0011
7.4984× 10-4
0.0013
Simulation Cases
ε2 = 0.0336
(a)
(b)
(c)
Regulator Poles
-335.9866
-0.1175
-1.6637 ± j 1.9492
-0.4960
-328.8020
-0.0326
-1.6878 ± j 1.9719
-0.4960
-319.0929
-0.1067
-1.6373 ± j 1.9281
-0.4960
Filter Poles
-1.7355 ± j 2.3684
-0.5646 ± j 1.9663
-2.0216
-1.6018 ± j 1.9232
-0.9085 ± j 1.9752
-0.4621
-1.6148 ± j 1.9962
-0.7953 ± j 1.8857
-0.6301
Closed-loop Poles
-336.2965
-0.6494 ± j 2.3639
-0.4942
-6.1907
-329.5471
-2.6615 ± j 2.2362
-0.5249 ± j 0.0746
-320.3173
-3.3482
-1.0286 ± j 1.0484
-0.4288
Optimal Cost (J*)
1863.2246
1827.3961
1742.3422
Stochastic Cost (JS )
2.7041
4.5961
4.4416
H2 Norm
6.6683 × 10-4
2.6280 × 10-5
3.3755 × 10-4
46
5.3.2 Composite Control
Following the method described in Section 3.4.1, the full-order model (5.5) is decoupled
into two lower order subsystems, namely slow and fast. In composite control approach, Kalman
filter and compensator are designed for each subsystem, and the performance of the system is
analyzed by feeding back the filter and regulator gains to the full-order model. Figures 5.7 - 5.12
describe the response of the closed-loop system with composite control law under the influence
of the disturbance for different cases of state measurements and εi (i = 1, 2).
•
Case 1 (a):
6
4
2
0
-2
-4
-6
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
6
4
2
0
-2
-4
-6
0
5
10
15
20
Time (sec)
Figure 5.7 Closed-loop response using composite control (Case (a) and ε1 = 0.24)
47
25
•
Case 2 (a):
6
4
2
0
-2
-4
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
6
4
2
0
-2
-4
0
5
10
15
20
25
Time (sec)
Figure 5.8 Closed-loop response using composite control (Case (a) and ε2 = 0.0336)
Comparing Figures 5.7 and 5.8, both the cases of εi (i = 1, 2) of composite control gives a fairly
similar response comparing to that of the full-order model response (Figures 5.1 and 5.2) while
having a much lower settling time (TS ~ 2 seconds).
48
•
Case 1 (b):
3
2
1
0
-1
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
3
2
1
0
-1
0
5
10
15
20
Time (sec)
Figure 5.9 Closed-loop response using composite control (Case (b) and ε1 = 0.24)
49
25
•
Case 2 (b):
3
2
1
0
-1
-2
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
3
2
1
0
-1
-2
0
5
10
15
20
25
Time (sec)
Figure 5.10 Closed-loop response using composite control (Case (b) and ε2 = 0.0336)
Comparing Figures 5.9 and 5.10, again the case of when α is not measured yields a similar result
to that of the full-order model response (Figures 5.3 and 5.4). The case of ε2 makes the system
achieve steady state in 7.5 seconds while ε1 takes about than almost 22 seconds to become
stable.
50
•
Case 1 (c):
3
2
1
0
-1
0
0.5
1
1.5
2
2.5
Time (sec)
(rad)
v (nondim.)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
3
2
1
0
-1
0
10
20
30
40
50
Time (sec)
60
70
80
90
Figure 5.11 Closed-loop response using composite control (Case (c) and ε1 = 0.24)
51
100
•
Case 2 (c):
3
2
1
0
-1
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
3
2
1
0
-1
0
5
10
15
20
25
Time (sec)
Figure 5.12 Closed-loop response using composite control (Case (c) and ε2 = 0.0336)
Comparing Figures 5.11 and 5.12, the case of when only θ and q are measured follows the same
trait just as in previous cases. ε2 significantly yields better system response with TS = 1.5 seconds
while in the case of ε1 the system response takes about 60 seconds to reach the steady state.
52
TABLE 5.5
SIMULATION RESULTS FOR COMPOSITE CONTROL OF LOWER-ORDER SLOW AND
FAST SUBSYSTEMS
ε1 = 0.24
Simulation Cases
(a)
(b)
(c)
Slow Regulator
Poles
-0.1464
-44.9297
-0.1464
-44.9297
-0.0115
-27.0066
Fast Regulator
Poles
-43.0408
-1.5033
-0.4960
-24.1258
-1.3655
-0.4960
-38.2713
-1.6685
-0.4960
Slow Filter Poles
-0.0207 ± j 0.3195
-0.0207 ± j 0.3195
-0.0207 ± j 0.3195
Fast Filter Poles
-1.0828 ± j 2.6285
-1.7522
-0.7188 ± j 2.2375
-0.7593
-0.7319 ± j 2.2541
-0.8294
Closed-loop Poles
-79.5937
-2.8165
-0.4917 ± j 1.4480
-0.2390
-60.6989
-0.6630 ± j 1.8714
-0.1104
-0.7235
-63.5801
-0.7712 ± j 1.1113
-0.0431
-0.8660
Optimal Cost (J*)
546.1505
445.7660
469.5648
Stochastic Cost
(JS )
0.6140
0.0278
0.0258
H2 Norm
6.8453 × 10-4
0.0011
0.0013
53
TABLE 5.5 (continued)
ε2 = 0.0336
Simulation Cases
(a)
(b)
(c)
Slow Regulator
Poles
-201.2983
-0.2033
-201.2983
-0.2033
-161.0901
-0.2041
Fast Regulator
Poles
-43.0408
-1.5033
-0.4960
-24.1258
-1.3655
-0.4960
-38.2713
-1.6685
-0.4960
Slow Filter Poles
-0.3050 ± j 2.2810
-0.3050 ± j 2.2810
-0.3050 ± j 2.2810
Fast Filter Poles
-1.0828 ± j 2.6285
-1.7522
-0.7188 ± j 2.2375
-0.7593
-0.7319 ± j 2.2541
-0.8294
Closed-loop Poles
-72.0968
-1.4656 ± j 3.2547
-1.2027 ± j 0.8413
-53.4549
-1.2384 ± j 4.6188
-0.3908 ± j 0.0588
-62.0602
-1.3964 ± j 3.4225
-0.4383 ± j 0.1745
Optimal Cost (J*)
469.0377
368.6532
417.1242
Stochastic Cost
(JS )
0.6141
0.0279
0.0260
H2 Norm
5.2049 × 10-4
5.8840 × 10-4
8.3060 × 10-4
54
5.3.3 Reduced Control
In reduced control approach, the performance of the system is analyzed by designing
Kalman filter and compensator only for the slow subsystem which is the reduced-order model
that saves computational time. Figures 5.13 - 5.18 describe the response of the closed-loop
system with reduced control law under the influence of the disturbance for different cases of
state measurements and εi (i = 1, 2).
•
Case 1 (a):
1.5
1
0.5
0
-0.5
-1
-1.5
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
1.5
1
0.5
0
-0.5
-1
0
5
10
15
20
Time (sec)
Figure 5.13 Closed-loop response using reduced control (Case (a) and ε1 = 0.24)
55
25
•
Case 2 (a):
2
1
0
-1
-2
-3
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
2
1
0
-1
-2
-3
0
5
10
15
20
25
Time (sec)
Figure 5.14 Closed-loop response using reduced control (Case (a) and ε2 = 0.0336)
Comparing Figures 5.13 and 5.14, the system response in the case of ε2 is highly oscillatory
compared to the case of ε1. However, ε2 provides the system with much lower TS (~ 6 seconds)
compared to that in the case of ε1 which takes 20 seconds to reach the steady state.
56
•
Case 1 (b):
1.5
1
0.5
0
-0.5
-1
-1.5
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
1.5
1
0.5
0
-0.5
-1
0
5
10
15
20
Time (sec)
Figure 5.15 Closed-loop response using reduced control (Case (b) and ε1 = 0.24)
57
25
•
Case 2 (b):
2
1
0
-1
-2
-3
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
2
1
0
-1
-2
0
5
10
15
20
25
Time (sec)
Figure 5.16 Closed-loop response using reduced control (Case (b) and ε2 = 0.0336)
Comparing Figures 5.15 and 5.16, the system response in case (b) is similar to that of the case
(a). ε2 yields a highly oscillatory system response but with the TS ~ 9 seconds. While in the case
of ε1, the system takes about 22 seconds to reach the steady state.
58
•
Case 1 (c):
1.5
1
0.5
0
-0.5
-1
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
w (rad)
3.5
4
(rad)
4.5
5
q (rad/s)
1
0.5
0
-0.5
-1
0
50
100
150
200
Time (sec)
Figure 5.17 Closed-loop response using reduced control (Case (c) and ε1 = 0.24)
59
250
•
Case 2 (c):
2
1
0
-1
-2
-3
0
0.5
1
v (nondim.)
1.5
2
2.5
Time (sec)
(rad)
3
3.5
4
(rad)
w (rad)
4.5
5
q (rad/s)
2
1
0
-1
-2
-3
0
5
10
15
20
25
Time (sec)
Figure 5.18 Closed-loop response using reduced control (Case (c) and ε2 = 0.0336)
Comparing Figures 5.17 and 5.18, the system response in case (c) is similar to that of the cases
(a) and (b). Again, ε2 yields a highly oscillatory system response but with the TS ~ 9 seconds.
While in the case of ε1, the system response is unexpectedly and exceptionally slow taking more
than 250 seconds to reach the steady state.
60
TABLE 5.6
SIMULATION RESULTS FOR REDUCED CONTROL OF REDUCED-ORDER MODEL
ε1 = 0.24
Simulation Cases
(a)
(b)
(c)
Closed-loop Poles
-36.4816
-0.1415
-0.6039 ± j 2.5039
-0.4960
-36.4816
-0.1415
-0.6039 ± j 2.5039
-0.4960
-25.0870
-0.0112
-0.6803 ± j 2.3027
-0.4960
Optimal Cost (J*)
336.4564
336.4564
274.1395
Stochastic Cost
(JS )
3.1268 × 10-36
3.1268 × 10-36
2.5220 × 10-36
H2 Norm
0.0023
0.0018
0.0029
ε2 = 0.0336
Simulation Cases
(a)
(b)
(c)
Closed-loop Poles
-29.8874
-0.6533 ± j 5.7017
-0.4378
-0.4960
-30.1683
-0.6465 ± j 6.3223
-0.2241
-0.4960
-24.9333
-0.5415 ± j 5.6804
-0.1403
-0.4960
Optimal Cost (J*)
259.3436
259.3436
221.6989
Stochastic Cost
(JS )
6.2636 × 10-5
4.0884 × 10-5
1.7528 × 10-4
H2 Norm
0.0026
0.0011
0.0044
61
5.4
Controller Results and Comparisons
The purpose of implementing LQG/H2 approach is due to the presence of external wind
disturbance, incomplete state information, and noise in measurement process. H2 control
minimizes the maximum singular value by appropriately designing the Kalman filter. Figure 5.19
gives a comparison of the singular values for the open-loop transfer function to the closed-loop
transfer function for three different control techniques implemented.
Figure 5.19 Maximum singular values of open-loop versus closed-loop system
As anticipated, the plot above evidently explains that the LQG/H2 control significantly
reduces the singular values of the closed-loop systems for any control technique as compared to
that of the open-loop system.
62
Also, Figure 5.19 shows that at lower frequency values optimal LQG control of full-order
model yields lower singular values when compared to that of the composite and reduced control
applied to the lower-order subsystems. However, the results are the other way round at higher
frequency values which are in accordance with the fact that the fast modes become relatively
more dominant at high frequencies present in full-order model and composite controllers.
As described in Section 3.5, to evaluate the effectiveness towards the performance of the
overall system, the three different controller techniques are subjected to comparative analysis
such as optimal cost, stochastic cost, and H2 norm. Simulation results, summarized in Tables 5.4,
5.5, and 5.6, show that the optimal cost for composite control for lower order subsystems is
larger than that of the optimal LQG control for full-order model while the reduced control for the
reduced-order model has the lowest optimal cost of all three controller techniques for all the
cases. The same pattern is observed in the case of the stochastic cost, JS. However, the pattern is
reversed in the case of H2 norms. For the reduced control the H2 norms are larger by the order of
O(ε) compared to the full-order and composite control for both cases of ε values. These results
are summarized in Table 5.7 that compares the optimal cost, stochastic cost, and H2 norms for
the optimal LQG, composite, and reduced controllers for all the cases.
When comparing different controller techniques with respect to the ε values, expectedly,
the cases for ε2 = 0.0336 yields better system response than that for the case of ε1 = 0.24. Greater
the value of small parameter, ε, higher the separation between the slow and fast dynamics of the
system. Thus, ε2 = 0.0336 estimates a better reduced model for the full-order dynamic system
compared to that by ε1 = 0.24. Closely studying the closed-loop system responses in Figures 5.1 5.18, the majority of the ε2 = 0.0336 responses have better settling time than the ε1 = 0.24 be it
for any controller technique.
63
TABLE 5.7
SUMMARY OF CONTROLLER COMPARISON CRITERIA
Controller
Techniques
Case No.
Optimal Cost
Stochastic Cost
H2 Norm
Case 1 (a)
469.6866
0.1482
0.0011
Case 2 (a)
1863.2246
2.7041
6.6683 × 10-4
Case 1 (b)
368.4921
0.1975
7.4984× 10-4
Case 2 (b)
1827.3961
4.5961
2.6280 × 10-5
Case 1 (c)
413.8070
0.1365
0.0013
Case 2 (c)
1742.3422
4.4416
3.3755 × 10-4
Case 1 (a)
546.1505
0.6140
6.8453 × 10-4
Case 2 (a)
469.0377
0.6141
5.2049 × 10-4
Case 1 (b)
445.7660
0.0278
0.0011
Case 2 (b)
368.6532
0.0279
5.8840 × 10-4
Case 1 (c)
469.5648
0.0258
0.0013
Case 2 (c)
417.1242
0.0260
8.3060 × 10-4
Case 1 (a)
336.4564
3.1268 × 10-36
0.0023
Case 2 (a)
259.3436
6.2636 × 10-5
0.0026
Case 1 (b)
336.4564
3.1268 × 10-36
0.0018
Case 2 (b)
259.3436
4.0884 × 10-5
0.0011
Case 1 (c)
274.1395
2.5220 × 10-36
0.0029
Case 2 (c)
221.6989
1.7528 × 10-4
0.0044
Optimal LQG
Composite
Reduced
64
CHAPTER 6
CONCLUSIONS
6.1
Summary of Research and Results
In this thesis, LQG/H2 control of singularly perturbed stochastic systems have been
considered for which three different control techniques are presented. Stochastic controllers for
full-order model and lower order subsystems of a singularly perturbed system are designed by
implementing liner-quadratic Gaussian control incorporating Kalman filter to handle wind
disturbance and sensor errors. Three controller techniques implemented are - optimal LQG
control for full-order model, composite control for lower-order slow and fast subsystems, and
reduced control for reduced-order model. The numerical simulations and their results evidently
show that the controllers designed for the lower-order models can be successfully implemented
to the full-order model yielding similar stability and control performance.
Tables 5.4, 5.5, and 5.6 presents the summary of simulation results for optimal LQG
control, composite control, and reduced control, respectively. Numerical values of controller for
the full-order model presented in Table 5.4 provides the baseline comparison for the other two
controller techniques. Keeping in mind the primary objective of reducing the controller design
process for a TTS system, results published in Tables 5.5 and 5.6 supports the proposal of
implementing composite and reduced control techniques designed for lower-order subsystems in
lieu of optimal LQG full-order model controller. Observation of the closed-loop poles in Tables
5.5 and 5.6 also suggests that the closed-loop performance achieved by implementing the
composite and reduced controllers is nearly equivalent or even better in some cases when
compared to that of the optimal LQG controller designed for full-order model. Figure 5.19
corroborates the implementation of composite and reduced control techniques and clearly
65
illustrates that these techniques even outperform the optimal LQG full-order model controller by
yielding lower maximum singular values at higher frequency values.
This thesis successfully addressed the primary objective of augmenting the large-scale
system with the disturbance model and representing the TTS system in the singularly perturbed
form for the purpose of order reduction and ease of controller design process. When comparing
the closed-loop responses of the optimal LQG control (Figures 5.1 - 5.6) with that of the
composite (Figures 5.7 - 5.12) and reduced control (Figures 5.13 - 5.18), it is clearly
demonstrated that the controllers designed either for slow and fast subsystems in separate time
scales or only for the reduced model are both effective enough to control the response of the fullorder model, and thus reducing the controller design complexity.
This thesis also solves the conundrum for the selection of singular perturbation parameter
by performing real-time flight simulations using different cases of ε values. Comparing between
ε1 = 0.24 and ε2 = 0.0336, ε1 gives poor reduced-order estimation of the full-order dynamic
system due to higher separation in time-scale. However, ε1 does not fail to provide a stable
system for any given case evidently seen in the odd-numbered figures between Figures 5.1 5.18, only that it lacks enough damping ratio for a few cases compared to that in the case of ε2 to
provide lower settling times for the system to become steady.
The practical model, TTS longitudinal model of F-8 aircraft, has successfully validated
all the techniques and methodologies presented in this thesis that has also helped to accomplish
its objectives. The longitudinal model of F-8 aircraft has effectively been augmented with the
wind disturbance model, accurately transformed and scaled to represent the TTS form, and
correctly carried out the time-scaled transformations to represent the TTS system in the
singularly perturbed form. Using the singular perturbation techniques, lower order slow and fast
66
subsystems have been derived for two different values of ε. Appropriate measurement matrices
and measurement noise intensities have been used in the simulations for various cases. LQG/H2
control has been well incorporated by separately designing Kalman filters for both slow and fast
subsystems. Three control techniques, namely optimal LQG, composite, and reduced, have
successfully been implemented on the singularly perturbed F-8 aircraft model that achieves
satisfactory closed-loop performance for all the discussed cases.
6.2
Recommendations for Future Work
Based on the research performed in this thesis, a few recommendations can be proposed
towards the extension of this work. First, the techniques presented in this thesis need to be
validated for all the flight conditions given in reference [1]. Only the subsonic flight condition
has been used for this research (Mach Number 0.6) under cumulus cloud cover. Operating at
transonic and supersonic flight conditions will also need one to consider the effects of
aeroelasticity and structural modes. This work can also be extended by implementing the
techniques presented in this thesis to a flexible aircraft. Supersonic flexible aircraft means pitch
instability at subsonic speeds and interactions between rigid-body flight dynamics and the
structural dynamics that pose new technical challenges for the design of automatic flight control
systems.
Second, parameter perturbations in the aircraft model and nonlinearities of the actuator
operating under thunderstorm conditions can be introduced to check for of the effectiveness of
different controllers. Lastly, due to rate constraint saturation on the elevator position, the time
rate of change of elevator position, e (t ) , can be selected as the control variable [1]. As a result,
the equation (2.12) no more remains in standard form, that is A41 becomes singular, and thus one
needs to incorporate the non-standard singular perturbation theory.
67
REFERENCES
68
LIST OF REFERENCES
[1]
Athans, M., D. Castanon, K. P. Dunn, C. S. Greene, W. H. Lee, N. R. Sandell, Jr., and A.
S. Willsky, “The Stochastic Control of the F-8C Aircraft Using a Multiple Model
Adaptive Control (MMAC) Method - Part I: Equilibrium Flight,” IEEE Transactions on
Automatic Control, Vol. AC-22, No. 5, Oct 1977, pp. 768-780.
[2]
Haddad, A.H. and P. V. Kokotovic, “Stochastic Control of Linear Singularly Perturbed
Systems,” IEEE Transactions on Automatic Control, Vol. AC-22, No. 5, Oct 1977, pp.
815-821.
[3]
Kokotovic, P. V., H. K. Khalil, and J. O'Reilly, Singular Perturbation Methods in
Control: Analysis and Design, Academic Press Inc., Orlando, Fl, U.S.A., 1986.
[4]
Vian, J. L. and M. E. Sawan, “H∞ Control for a Singularly Perturbed Aircraft Model,”
Optimal Control Applications & Methods, Vol. 15, 1994, pp. 277-289.
[5]
Kokotovic, P. V., “Application of Singular Perturbation Techniques to Control
Problems,” SIAM Review, Vol. 26, No. 4, Oct 1984, pp. 501-550.
[6]
Naidu, D. S., Singular Perturbation Methodology in Control Systems, Peter Peregrinus
Ltd., London, United Kingdom, 1988.
[7]
Shim, K. H. and M. E. Sawan, “Approximate Controller Design for Singularly Perturbed
Aircraft Systems,” Aircraft Engineering and Aerospace Technology: An International
Journal, Vol. 77, No. 4, 2005, pp. 311-316.
[8]
Levine, W.S., The Control Handbook, CRC Press LLC, U.S.A, 1996.
[9]
Lewis, F. L., L. Xie, and D. Popa, Optimal and Robust Estimation: With an Introduction
to Stochastic Control Theory, John Wiley & Sons, Inc., U.S.A., 2nd ed., 1986.
[10]
Curry, M., “Past Projects - F-8 Digital Fly-By-Wire” [online], NASA Dryden Flight
Research Center (US), [updated August 13, 2009; cited March 29, 2011], URL:
<http://www.nasa.gov/centers/dryden/history/pastprojects/F8/index.html>.
[11]
Elliot, J.R., “NASA's Advanced Control Law Program for the F-8 Digital Fly-By-Wire
Aircraft,” IEEE Transactions on Automatic Control, Vol. AC-22, No. 5, Oct 1977, pp.
753-757.
[12]
Etkin, B. and L. D. Reid, Dynamics of Flight: Stability and Control, Wiley, New York,
3rd ed., 1995.
[13]
Etkin, B., Dynamics of Atmospheric Flight, Wiley, New York, 1972.
69
[14]
Houbolt, J. C., R. Steiner, and K. G. Pratt, “Dynamic Response of Airplanes to
Atmospheric Turbulence Including Flight Data On Input and Response,” NASA
Technical Report R-199, Langley research Center, Hampton, VA, June 1964.
[15]
The MathWorks, Inc., MATLAB, ver. 7.11 (R2010b), Natick, MA, 2010.
70