A Direct Method For Predicting The High-Cycle Fatigue Regime In... plication To Nitinol Stents Pierre Colombé and Michaël Peigney
advertisement
MATEC Web of Conferences 33 , 0 2 0 0 5 (2015)
DOI: 10.1051/ m atec conf/ 201 5 33 0 2 0 0 5
C Owned by the authors, published by EDP Sciences, 2015
A Direct Method For Predicting The High-Cycle Fatigue Regime In SMAs: Application To Nitinol Stents
Pierre Colombé1 , a and Michaël Peigney2 , b
1
2
Département Génie Mécanique et Matériaux, Ecole des Ponts Paris, F-77455 Marne la Vallée, France
Univ Paris-Est, Laboratoire Navier (UMR 8205), CNRS, Ecole des Ponts ParisTech, IFSTTAR, F-77455 Marne la Vallée, France
Abstract. In fatigue design of metals, it is common practice to distinguish between high-cycle fatigue (occurring after 10000-100000 cycles) and low-cycle fatigue. For elastic-plastic materials, there is an established
correlation between fatigue and energy dissipation. In particular, high-cycle fatigue occurs when the energy
dissipation remains bounded in time. Although the physical mechanisms in SMAs differ from plasticity, the
hysteresis observed in the stress-strain response shows that some energy dissipation occurs, and it can be reasonably assumed that situations where the energy dissipation remains bounded is the most favorable for fatigue
design. We present a direct method for determining if the energy dissipation in a SMA structure is bounded or
not. That method relies only on elastic calculations, thus bypassing incremental nonlinear analysis. Moreover,
only a partial knowledge of the loading (namely the extreme values) is needed. Some results related to Nitinol
stents are presented.
1 Introduction
This paper is concerned with the long-time behaviour of
Shape Memory Alloys (SMA) bodies under prescribed
loading histories. For elastic perfectly plastic bodies, a
fundamental result is the Melan’s theorem [1, 2] which
gives a sufficient condition for the energy dissipation to
remain bounded with respect to time. That last situation
is classically referred to as shakedown, and is associated
with the intuitive idea that the body behaves elastically for
time t sufficiently large, i.e. that the plastic strain tends
to a limit as t → ∞. Melan’s theorem has the distinctive
property of being path-independent, i.e. independent on
the initial state of the structure. Regarding fatigue design,
shakedown corresponds to the most beneficial regime of
high-cycle fatigue, as opposed to the regime of low-cycle
fatigue which typically occurs if the plastic strain does not
converge towards a stabilized value [3].
Much effort has been devoted to developing constitutive laws for describing the behaviour of SMAs. The phase
transformation is typically described by an internal variable α which - depending on the complexity of the material model - may be scalar or vectorial. A fundamental observation is that the internal variable α must comply
with some a priori inequalities that result from the mass
conservation in the phase transformation process. As a
consequence, the internal variable α is constrained to take
values in a set K that is not a vectorial space (in most of
SMA models, K is a bounded set). The presence of such
constraints constitutes a crucial difference with plasticity
a e-mail: colombep@eleves.enpc.fr
b e-mail: michael.peigney@enpc.fr
models, and calls for special attention when the structural
evolution problem is considered [4–7].
It was recently proved that the Melan’s theorem could
be extended to SMAs [8, 9]. When the shakedown limit
provided by that theorem is exceeded, it was found that
the large-time behaviour is dependent on the initial state:
in the case of cyclic loadings, some initial conditions lead
to shakedown whereas some others lead to alternating
phase transformation. Such a feature is not found in standard plasticity. The shakedown theorem in [8, 9] is pathindependent - in the spirit of the original Melan theorem
[1, 2] - and applies to a wide range of constitutive models
of phase transformation in SMAs. As explained in this paper, the theorem in [8, 9] can be used to obtain bounds on
the loadings for which shakedown occurs, thus leading to
a general method for the fatigue design of SMA structures.
2 Evolution of a SMA continuum
2.1 Constitutive laws
We consider constitutive SMA models which enter the
framework of standard generalized materials [10]. The local state of the material is described by the strain and an
internal variable α tracking the phase transformation. The
variable α is constrained to take values in a given bounded
set K. The rate-independent behavior of the material is
determined by the constitutive relations
σ=
∂w
∂w
(, α) , A = − (, α),
∂
∂α
A = Ad + Ar ,
(1)
(2)
This is an Open Access article distributed under the terms of the Creative Commons Attribution License 4.0, which permits XQUHVWULFWHGXVH
distribution, and reproduction in any medium, provided the original work is properly cited.
Article available at http://www.matec-conferences.org or http://dx.doi.org/10.1051/matecconf/20153302005
MATEC Web of Conferences
α̇ ∈ ∂IC (Ad ),
(3)
Ar ∈ ∂IK (α).
(4)
where w(, α) is the free energy function and C is the elasticity domain of the material. In (3)-(4), ∂ denotes the subdifferential operator [11] and IK (resp. IC ) is the indicator function of the set K (resp. C), i.e. the function that is
equal to 0 in K (resp. C) and infinite outside K (resp. C).
In (2), A can be interpreted as the driving force for phase
transformation. Eq. (3) is the normality flow rule. The
term Ar in (2-4) arises as a consequence of the constraint
α ∈ K. We refer to [12] for a derivation of (1-4) from the
principle of thermodynamics.
We assume that the sets C, K are convex and consider
free energy functions w(, α) of the form
w(, α) =
1
( − K·α) : L : ( − K · α) + f (α)
2
(5)
where L is symmetric positive, K is a given matrix, and f
is a positive differentiable function (not necessarily linear
nor convex). In such case, we have from (1)
σ = L : ( − K · α) , A = K t : σ − f (α)
where K t is the transpose of K and f is the derivative
of f . The total strain is thus the sum of an elastic strain
L−1 : σ (proportional to the stress) and an inelastic strain
K · α (proportional to the internal variable α). The driving
force A depends linearly on the stress σ, but may depend
nonlinearly on the internal variable α.
Many existing models of shape-memory alloys fit in
the format considered. For instance, a three-dimensional
micromechanical model of single crystals used in the literature [4, 6, 7] is given by
1
ξi i ) : L : ( −
ξi i ) +
mi ξi ,
( −
2
i=1
i=1
i=1
C = [G−1 , G+1 ] × · · · × [G−n , G+n ],
n
ξi ≤ 1},
K = {ξ ∈ Rn+ :
n
n
w(, ξ) =
i=1
(6)
where n is the number of martensitic variants and i is the
given transformation strain for each variant. The scalars
mi , G+i , G−i in (6) are all constitutive parameters of the
model. The internal variable ξ = (ξ1 , · · · , ξn ) represents
the set of volume fractions for each martensitic variant.
Because of mass conservation in the phase transformation,
the volume fraction of the austenite is equal to 1 − i ξi ,
hence the constraint i ξi ≤ 1 that is imposed on ξ. For ξ
verifying 0 < ξi (for all i) and i ξi < 1, the term Ar in (4)
is equal to 0 and the relations (2-3) become
ξ̇i ≥ 0
ξ̇i ≤ 0
ξ̇i = 0
if σ : i −
if σ : i −
if σ : i −
mi = G+i ,
mi = G−i ,
mi ∈ (G−i , G+i ).
Phenomenological SMA models can also enter the format considered. An example is the model of [13, 14], defined by
w(, αtr ) = 12 ( − αtr ) : L : ( − αtr ) + aαtr + 12 hαtr 2 ,
C = {σ ∈ R3×3
: dev(σ) ≤ σY },
s
K = {αtr ∈ R3×3
: tr αtr = 0; αtr ≤ L }.
s
(7)
where dev denotes the deviator. In the model (7), the
internal variable is the macroscopic transformation strain
αtr . The constitutive parameters h, L and σY are positive.
The constitutive parameter a is positive in the superelastic
regime, i.e. for sufficiently high temperatures. The norm
. in (7) is the euclidean norm
in the space of 3 × 3 sym3
2
metric matrices, i.e. τ =
i, j=1 τi j . In order to elucidate the meaning of the relations (2-4), consider the simplifying case a = h = 0 in (7). For αtr such that αtr < L ,
the term Ar in (4) is equal to 0 so that (2-3) reduce to
α̇tr = λ dev(σ) with λ ≥ 0, λ(σY − dev(σ)) = 0. (8)
The relation (8) corresponds the Von Mises flow rule for
the internal variable αtr . In particular, when α̇tr 0
(i.e. phase transformation occurs), (8) can be equivalently
rewritten as
α̇tr
dev(σ) = σY tr .
(9)
α̇ For αtr such that αtr = L , the term Ar in (4) takes the
form Ar = μα (with μ ≥ 0). Eqs (8-9) have to be modified
accordingly. In particular, (9) becomes
dev(σ) = σY
α̇tr
+ μα.
α̇tr 2.2 Quasi-static evolutions
In the following we are interested in studying the evolutions of a continuum submitted to a prescribed loading history. The continuum occupies a domain Ω and is submitted
to body forces f d . Displacements ud are imposed on a part
Γu of the boundary Γ, and tractions T d are prescribed on
ΓT = Γ − Γu . The given functions f d ,ud ,T d depend on position x and time t. The stress and state variables (σ, , α)
in the continuum are also expected to depend on (x, t). In
order to alleviate the expressions, this dependence will be
omitted in the notations, unless in the case of possible ambiguities.
Quasi-static evolutions of the continuum are governed
by the following system:
σ ∈ K σ , ∈ K , α ∈ K,
α̇ ∈ ∂IC ( Ad ) , Ar ∈ ∂IK (α),
σ = L : ( − K·α),
K t : σ − f (α) = Ad + Ar ,
(10)
where K σ and K are respectively the sets of admissible
stress and strain fields, defined by
K σ = {σ|div σ + f d = 0 in Ω; σ · n = T d on ΓT },
K = {| = (∇u + (∇u)t )/2 in Ω; u = ud on Γu }.
Those relations define the evolution of phasetransformation in a way similar to crystal plasticity.
(11)
Starting from a given initial state α(0), (10) determines the
evolution of the stress and strain fields.
02005-p.2
ESOMAT 2015
3 A general method for fatigue design
3.2 Proof of the theorem
3.1 Shakedown theorem
Consider a solution (, α, σ, Ar , Ad ) of the evolution problem (for some given initial condition) and let
D(t) =
Ad · α̇dx
We examine conditions under which the energy dissipation
T
Ad · α̇dxdt remains bounded (with respect to time
0 Ω
T ) for all solutions of the evolution problem (10). Such
a situation is referred to as shakedown. As mentioned in
the introduction, shakedown is related to the fact that the
evolution becomes elastic in the large-time limit [8, 15]
and corresponds to high-cycle fatigue.
Let us introduce the so-called fictitious elastic response (σE , E ) of the system, i.e. the response that would
be obtained if the material was purely elastic. More precisely, (σE , E ) is the solution of
σE ∈ K σ , E ∈ K , σE = L : E .
be the rate of dissipated energy. Assuming (m, τ, Ar∗ ) satisfy (13), we show in the following that the total dissipated
T
energy 0 D(t)dt remains bounded as T → ∞. To that purpose, introduce the positive functional W(t) defined as
W(t) =
w((t) − E (t), α(t)) dx.
Ω
We have
(12)
The central result is the following shakedown theorem
[8, 9]: If there exists m > 1, τ ≥ 0 and a time-independent
field A∗ (x) such that
mK t : σE (x, t) − A∗ (x) ∈ C ∀x ∈ Ω, ∀t > τ
Ω
(13)
then there is shakedown, irrespective of the initial condition. A proof of that theorem is presented in 3.2. We refer
to [8, 9] for more details.
There is a simple geometric interpretation of the condition (13): Consider a fixed location x and let Γ(t) be
the curve described by K t : σE (x, t). The condition (13)
means that, up to a time-independent translation, the curve
Γ remains in the elasticity domain C (for time t large
enough).
As an example, consider the material model (7). Using
the presented theorem, it can easily be seen that shakedown occurs if msE (x, t) − A∗ (x) ≤ σY where sE is
the deviatoric part of σE and A∗ (x) is an arbitrary deviatoric tensor. The obtained shakedown condition thus reduces to a restriction on the diameter of the curve sE (x, t),
as for shakedown in linear kinematic hardening plasticity
[15, 16].
Observe that we did not assume the convexity of f .
This is a welcome feature for the shakedown analysis of
SMA bodies because the function f associated with some
micromechanical SMA models is not necessarily convex
[17–20]. We refer to [9] for a detailed discussion between
the theorem (13) and the analog result in plasticity.
Finally, we note that the above theorem gives a sufficient condition for shakedown to occur, whatever the initial state is. When the loading is beyond the limit provided
by the theorem, shakedown may still occur for some (but
not all) initial conditions (see [8, 9]) for some examples).
In such case, the asymptotic behavior is strongly dependent on the initial state: For instance, in the case of periodic loading, some initial conditions leads to shakedown
while others lead to alternate phase transformation (i.e. a
periodic but non constant evolution of the phase transformation). Interesting, such dependence of the asymptotic
regime on the initial state has also been observed in other
nonlinear mechanical problems, such as contact with friction [21] and plasticity with temperature-dependent elastic
moduli [22].
Ẇ(t) =
Ω
[(σ − σE ) : (˙ − ˙ E − K · α̇) + f (α) · α̇] dx.
Since div(σ − σE ) = 0 in Ω, (σ − σE ) · n = 0 on ΓT and
u − uE = 0 on Γu , the principle of virtual power gives
(σ − σE ) : (˙ − ˙ E ) dx = 0.
Ω
Hence
Ẇ(t) =
Ω
[−K t : (σ − σE ) + f (α)] · α̇ dx
which using (10) can be rewritten as
Ẇ(t) = −D(t) + [−Ar + K t : σE ] · α̇ dx.
Ω
Setting Ad∗ = mK t : σE (t) − Ar∗ , we obtain
1
Ẇ(t) = −D(t) + [−Ar + ( Ad∗ + Ar∗ )].α̇ dx.
m
Ω
(14)
The property (13) shows that Ad∗ ∈ C for t > τ. Since
α̇ ∈ ∂IC (Ad ) and C is convex, we have
( Ad − Ad∗ ) · α̇ ≥ 0.
(15)
This last relation can be interpreted as the principle of
maximum dissipation. Similarly, the relations Ar ∈
∂IK (α) and α ∈ K imply that
0 ≥ Ar (t) · (α(t ) − α(t))
for any t . Taking the limit t −→ t with t < t, we obtain
Ar · α̇ ≥ 0
(16)
where α̇ is the left-time derivative. Combining (15)-(16)
with (14) yields
1
1−m
Ẇ(t) ≤
Ar · α̇ dx.
D(t) +
m
m Ω ∗
Integrating with respect to time on [τ, T ] and noting that
Ar∗ is time-independent, we find
T
D(t) dt ≤ mW(τ) +
Ar∗ · (α(T ) − α(τ)) dx
(m − 1)
02005-p.3
τ
Ω
(17)
MATEC Web of Conferences
where the property W(T ) ≥ 0 has been used. Since K
is bounded, there exists a positive constant K such that
α ≤ K for any α ∈ K. Therefore
Ar∗ · (α(t) − α(τ)) dx ≤ 2K
Ar∗ dx.
Ω
Ω
Combining that inequality with (17) gives
(m − 1)
τ
T
D(t) dt ≤ mW(τ) + 2K
Ω
Ar∗ dx.
The right-hand side of that inequality is independent on
T
T . Therefore τ D(t) is bounded as T −→ +∞, which
completes the proof.
Figure 1. Geometry of a stent.
where
MHCF = min
3.3 Application to fatigue design
i
In practice, the shakedown condition (13) can be used to
bound the loadings for which shakedown occurs. To illustrate this point, consider the simple situation of a proportional loading history: The functions f d ,ud ,T d that define
the loading history take the form
f d (x, t) = λ(t) f d0 (x),
ud (x, t) = λ(t)ud0 (x) ,
T d (x, t) = λ(t)T d0 (x)
where λ(t) is a loading parameter, depending on time. The
elastic response σE in (12) can be written as
G+i − G−i
sup x∈Ω i : σ0E (x)
.
(22)
We can observe that the loading history only appears in
(21) through the extreme values λmin and λmax : The detailed knowledge of λ(t) is not required. In particular, λ(t)
does not need to be periodic.
As an other example, consider the case where the elasticity domain C is a ball, such as for the phenomenological
model (7). Then (19) can be satisfied by some A∗ (x) provided that
m(λmax − λmin )K t : σ0E (x) ≤ diam C ∀x ∈ Ω
(23)
where diam C is the diameter of C, i.e.
σE (x, t) = λ(t)σ0E (x)
diam C = sup τ − τ .
τ,τ ∈C
where σ0E (x) is the solution of the elasticity problem (12)
for the loading ( f d0 ,ud0 ,T d0 ). Therefore, the condition (13)
becomes
Shakedown occurs if (23) is satisfied by some m > 1 and
for all x ∈ Ω, i.e. if
mλ(t)K t : σ0E (x) − A∗ (x) ∈ C ∀x ∈ Ω, ∀t > τ.
Assume that λ(t) varies between a minimum value λmin
and a maximum value λmax . In such case, (18) is satisfied
provided that
m(λmax − λmin )K t : σ0E (x) − A∗ (x) ∈ C
(19)
for some A∗ (x) and some m > 1. It is necessary at this
point to distinguish between the SMA models considered.
For instance, for the micromechanical model (6) of single
crystals, the condition (19) can be rewritten as
m(λmax − λmin ) i : σ0E (x) ≤ G+i − G−i .
λmax − λmin < MHCF
(18)
(20)
where we recall that i is the transformation strain for variant i. For a scalar m > 1 satisfying (20) at all point x to
exist, it is necessary that
(λmax − λmin ){sup i : σ0E (x)} < G+i − G−i .
x∈Ω
The conclusion is that shakedown occurs if the loading satisfies
λmax − λmin < MHCF
(21)
where MHCF is now defined by
MHCF =
diam C
.
sup x∈Ω K t : σ0E (x)
(24)
The conclusion is the following: If the amplitude
λmax − λmin of the loading is smaller than MHCF , then the
structure shakes down and therefore is expected to be in
the high cycle fatigue regime. The scalar MHCF can thus
be interpreted as a limit for high cycle fatigue. In practice, the calculation of MHCF only requires to solve a single problem of linear elasticity (so as to obtain σ0E ). The
relation (21) can be used as a criterion for the fatigue design of SMA structures: If the amplitude of the loading
is specified, the geometry of the structures and the choice
of constitutive materials should be adjusted so as to satisfy
(24). The latter indeed have a direct influence of the elastic
response σ0E .
4 Application to Nitinol stents
In this section we discuss the application of the proposed
method to Nitinol stents, that are used in the biomedical
02005-p.4
ESOMAT 2015
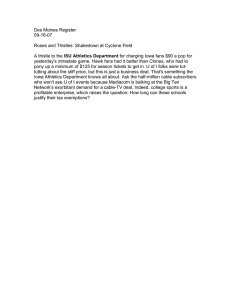
Figure 2. Diamond-shape specimen used in unaxial traction
tests: Reference configuration (left), Deformed configuration
(right).
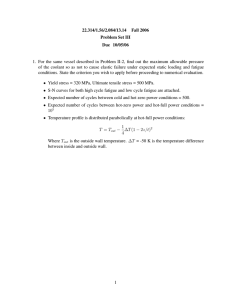
Figure 3. Results of linear FEA (Von Mises distribution).
Using the SMA model (7), the high cycle fatigue limit
(24) becomes
field for treating artery disease [23, 24]. The tubular geometry of such devices (see Fig. 1) usually consists in the
repetition of an elementary motif (a ’strut V’ in the case
of Fig. 1). In order to study the fatigue of stents, some
extensive testing has been done in [25] on specifically designed diamond-shape specimen (a simplified model of
such specimen is shown in Fig. 2). Those diamond shaped
specimen consists in 2 ’strut Vs’ arranged in a symmetric
fashion, so as to be easily fitted in a fatigue test machine.
The specimen were submitted to displacement-controlled
cyclic loading (along the horizontal direction in Fig. 2),
with prescribed mean and strain amplitudes. The resulting
S-N curves (strain amplitude vs number of cycles to failure) showed a low- to high-cycle fatigue transition occurring for a strain amplitude approximatively equal to 0.5%,
without any clear influence of the mean strain: for a prescribed strain amplitude larger than 0.5%, failure typically
occurred after a low number of cycles (103 −105 ), whereas
for a prescribed strain amplitude smaller than 0.5%, the
specimen survived after 105 cycles (see [25] for details).
It is interesting to see if the shakedown-based approach
presented in Sect. 3 is consistent with then experimental results in [25]. To that purpose, linear Finite Element
Analysis (FEA) was used to evaluate the fictitious elastic
response σ0E . The geometry used in the computations is
represented in Fig. 2(left). The maximum length along
the horizontal direction (which is the direction of loading)
is l =1.35 mm. The length in the vertical direction is equal
to 3.104 mm and the thickness is equal to 0.2 mm. In Fig.
2(right) is shown the deformed configuration obtained by
FEA for a reference value 0 of the imposed strain (arbitrary set equal to 0.055/l = 0.0407%). The corresponding
stress distribution σ0E is shown in Fig. 3. The elasticity
tensor L was chosen as isotropic with a Young modulus
equal to 50 GPa and a Poisson ration equal to 0.35 [14].
MHCF =
2σY
.
sup x∈Ω s0E (x)
Note that s0E (x) corresponds to the standard Von Mises
stress. FEA shows that sup s0E (x) is approximatively
equal to 1406 MPa. That value is reached in the knee area
of the specimen (see Fig. 3 ). Using the constitutive value
σY = 50 MPa [14], the shakedown limit is approximatively equal to 0.35% (strain amplitude), which –notably
given the approximation on the geometry as well as on the
constitutive parameters– is in satisfactory agreement with
the experimental results of [25].
5 Concluding remarks
In this communication, we have presented a general
method for the fatigue design of SMA bodies, based on
shakedown theory. That method is direct in the sense
that incremental nonlinear analysis – which is costly and
somewhat tricky to perform for SMAs – is completely bypassed. Moreover, only a partial knowledge of the loading (namely the knowledge of the extreme values) is required. That method is very simple to use as it only relies
on elastic calculations and can be implemented in the postprocessing stage. Further work is in progress to carry such
an implementation is the general case of a parametrized
loading history.
On a final note, we observe that all those simplifying features ultimately stem from a distinctive property of
SMA models, namely the constraints that are placed on the
internal variable. Compared to plasticity, such constraints
makes solving incremental evolutions more complicated
but they considerably simplify the shakedown analysis.
References
[1] E. Melan, Sitz.Berl.Ak.Wiss. 145, 195 (1936)
02005-p.5
MATEC Web of Conferences
[2] W.T. Koiter, General problems for elastic solids,
Progress in solid mechanics (1960)
[3] A. Constantinescu, K. Dang Van, M. Maitournam,
Eng. Mater. Struct. 26, 561 (2003)
[4] S. Govindjee, C. Miehe, Comput. Meth. Appl. Mech.
Engrg. 191, 215 (2001)
[5] M. Peigney, C.R.Mecanique 334, 266 (2006)
[6] M. Peigney, J. Seguin, E. Hervé-Luanco, Int. J. Sol.
Struct. 48, 2791 (2011)
[7] M. Peigney, J. Seguin, Int. J. Sol. Struct. 50, 4043
(2013)
[8] M. Peigney, Eur. J. Mech. A 29, 785 (2010)
[9] M. Peigney, Ann. Solid Struct. Mech. 6, 17 (2014)
[10] B. Halphen, Q.S. Nguyen, J.Mécanique 14, 1 (1975)
[11] H. Brézis, Opérateurs maximaux monotones et semigroupes de contractions dans les espaces de hilbert,
North-Holland, Amsterdam (1972)
[12] M. Frémond, Non-smooth thermomechanics,
Springer (2002)
[13] A. Souza, E. Mamiya, N. Zouain, Eur.J.Mech. A 17,
789 (1998)
[14] F. Auricchio, L. Petrini, Int.J.Num.Meth.Eng. 61,
807 (2004)
[15] Q.S. Nguyen, J.Mech.Phys.Solids 51, 101 (2003)
[16] J. Mandel, B. Halphen, J. Zarka, Mech. Res. Comm.
4, 309 (1977)
[17] K. Hackl, R. Heinen, J.Mech.Phys.Solids 56, 2832
(2008)
[18] M. Peigney, J.Mech.Phys.Solids 57, 970 (2009)
[19] M. Peigney, J.Mech.Phys.Solids 61, 1489 (2013)
[20] M. Peigney, J.Mech.Phys.Solids 61, 1511 (2013)
[21] Y.J.
Ahn,
E.
Bertocchi,
J.
Barber,
J.Mech.Phys.Solids 56, 3433 (2008)
[22] M. Peigney, J.Mech.Phys.Solids 71, 112 (2014)
[23] S.H. Duda, M. Bosiers, J. Lammer, D. Scheinert,
T. Zeller, A. Tielbeek, J. Anderson, B. Wiesinger,
G. Tepe, A. Lansky et al., J. Vasc. Interv. Radiol. 16,
331 (2005)
[24] S. Sabeti, W. Mlekusch, J. Amighi, E. Minar,
M. Schillinger, J. Endovasc. Ther. 12, 6 (2005)
[25] A. Pelton, V. Schroeder, M. Mitchell, X.Y. Gong,
M. Barney, S. Robertson, J. Mech. Behavior Biomed.
Mater. 1, 153 (2008)
02005-p.6
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users