ME 3560 Fluid Mechanics Chapter IX. Flow over Immersed Bodies Summer 2016
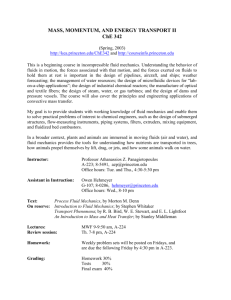
advertisement

ME3560 – Fluid Mechanics Summer 2016 ME 3560 Fluid Mechanics Chapter IX. Flow over Immersed Bodies 1 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.1 General External Flow Characteristics •A body immersed in a moving fluid experiences a resultant force due to the interaction between the body and the fluid surrounding it. •In some instances the fluid far from the body is stationary and the body moves through the fluid with velocity U. •Or the body is stationary and the fluid flows past the body with velocity U. •In both cases, the coordinate system can be fixed to the body and treat the situation as fluid flowing past a stationary body with velocity U, the upstream velocity. 2 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •The structure of an external flow and the description and analysis of the flow depend on the nature of the body in the flow. •Two-dimensional objects infinitely long and of constant crosssectional size and shape. •Axisymmetric bodies formed by rotating their cross-sectional shape about the axis of symmetry. •Three-dimensional bodies that may or may not possess a line or plane of symmetry. 3 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.1.1 Lift and Drag •When any body moves through a fluid, two types of forces occur as a result of this motion: •Wall shear stress (τw) forces, due to viscous effects •Normal stress forces, due to the pressure, p. •The resultant force in the direction of the upstream velocity is termed the drag, D, and the resultant force normal to the upstream velocity is termed the lift, L •For some three-dimensional bodies there may also be a side force that is perpendicular to the plane containing D and L. 4 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •The resultant of the shear stress and pressure distributions can be obtained by integrating the effect of these two quantities on the body surface: dFx = ( pdA) cosθ + (τ w dA) sin θ dFy = −( pdA) sin θ + (τ w dA) cosθ D = ∫ dFx = ∫ p cosθ dA + ∫ τ w sin θ dA L = ∫ dFy = − ∫ p sin θ dA + ∫ τ w cosθ dA •To carry out the integrations and determine the lift and drag, the body shape, the distribution of τw and p along the surface need to be known. • These distributions are often extremely difficult to obtain. •The pressure distribution can be obtained experimentally by use of a series of static pressure taps along the body surface. • It is usually quite difficult to measure the wall shear stress distribution 5 Chapter IX. Flow over Immersed Bodies Summer 2016 ME3560 – Fluid Mechanics The equations to determine drag and lift, D = ∫ p cosθ dA + ∫ τ w sin θ dA L = −∫ p sin θ dA + ∫ τ w cosθ dA are valid for any body, however, it is necessary to know the appropriate shear stress and pressure distributions on the body surface. This is not easy, such information is available only for certain simple situations. D= θ dA ∫1p4cos 243 + sin θ dA ∫1τ42 43 w PressureDrag Friction (viscous) Drag L = − ∫ p sin θ dA + cosθ dA ∫1τ42 43 w Usually Negligible 6 Chapter IX. Flow over Immersed Bodies Summer 2016 ME3560 – Fluid Mechanics Alternatively, dimensionless lift and drag coefficients are defined and their approximate values are determined by means of either a simplified analysis, some numerical technique, or an appropriate experiment. The lift coefficient, CL , and drag coefficient, CD, are defined as CD = D 1 2 ρ U A 2 CL = A is a characteristic area of the object. L 1 2 ρ U A 2 U is the upstream velocity. 7 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 Pressure-Sensitive Paint (PSP) PSP is now gaining acceptance as an alternative to the static surface pressure ports. The PSP material is typically a luminescent compound that is sensitive to the pressure on it and can be excited by an appropriate light which is captured by special video imaging equipment. Thus, it provides a quantitative measure of the surface pressure. PSP is a global measurement technique, measuring pressure over the entire surface, as opposed to discrete points. PSP also has the advantage of being nonintrusive to the flow field. 8 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 Particular Cases: •θ = 0. •Friction Drag = 0. Drag is due to pressure only (form drag). •θ = π/2. Flat plate parallel to flow •Pressure Drag = 0. Only viscous drag is present. 9 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.1.2 Characteristics of Flow Past an Object Re = Ul ν 10 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Re = Summer 2016 UD ν 11 Chapter IX. Flow over Immersed Bodies Summer 2016 ME3560 – Fluid Mechanics 9.2 Boundary Layer Characteristics •Consider the case in which the boundary layer is formed on an infinitely long flat plate along which flows a viscous, incompressible fluid. Re = Ux ν 12 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •Some distance downstream from the leading edge, the boundary layer flow becomes turbulent. •Turbulent flow is characterized by the occurrence of irregular mixing of fluid particles that range in size from the smallest fluid particles up to those comparable in size with the object of interest. •For laminar flow, mixing occurs only on the molecular scale. 13 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •The transition from a laminar boundary layer to a turbulent boundary layer occurs at a critical value of the Reynolds number, Rexcr= 2 × 105 to 3 × 106 •Depending on the surface roughness and the amount of turbulence in the upstream flow. •The location along the plate where the flow becomes turbulent, xcr, moves towards the leading edge as the free-stream velocity increases. 14 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •The boundary layer thickness, δ, is the distance from the plate at which the fluid velocity is 0.99U: y = δ whereu = 0.99U • Fig. b shows two velocity profiles—one if there were no viscosity (a uniform profile) and one considering the viscosity and zero slip at the wall (the boundary layer profile). 15 Chapter IX. Flow over Immersed Bodies Summer 2016 ME3560 – Fluid Mechanics Rexcr = 5×105 Laminar Boundary Layer: If Rex < 5×105 νx δ =5 τ w = 0.332U U 3/ 2 τw Cf = 1 2 ρ U 2 C Df or FD =1 2 ρ U A 2 δ Ux 5 = ; Re x = x ν Re x ρµ x 0.664 Cf = Re x CDf 1.328 = Re L 16 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.2.4Transition from Turbulent to Laminar Flow •The analytical results shown in the previous section are restricted to laminar boundary layer flows along a flat plate with zero pressure gradient. •They agree quite well with experimental results up to the point where the boundary layer flow becomes turbulent. •Any BL will become turbulent for any free-stream velocity and any fluid provided the plate is long enough. 17 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.2.4Transition from Turbulent to Laminar Flow •Re at the transition location is a function of various parameters: - Roughness of the surface. - The curvature of the surface (for example, a flat plate or a sphere). - The disturbances in the flow outside the boundary layer. •On a flat plate with a sharp leading edge in a typical airstream, the transition takes place at Rexcr = 2 × 105 to 3 × 106. •For our Calculations we will use Rexcr = 5×105 18 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •The transition from laminar to turbulent flow involves the instability of the flow field. •Small disturbances imposed on the boundary layer flow: from a vibration of the plate, a roughness of the surface will either grow (instability) or decay (stability), depending on where the disturbance is introduced into the flow. •If these disturbances occur at a location with Rex < Rexcr they will die out, and the boundary layer will return to laminar flow at that location. •Disturbances imposed at a location with Rex > Rexcr will grow and transform the boundary layer flow downstream of this location into turbulence. 19 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •The transition from laminar to turbulent flow involves a noticeable change in the shape of the boundary layer velocity profile. •The turbulent profiles are flatter, have a larger velocity gradient at the wall, and produce a larger boundary layer thickness than do the laminar profiles. 20 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.2.5 Turbulent Boundary Layer Flow •The structure of turbulent boundary layer flow is very complex, random, and irregular. •The figure shows a laser-induced fluorescence visualization of a turbulent boundary layer on a flat plate. •There are no “exact” solutions for turbulent boundary layer flow. •Considerable effort has been made to obtain numeric solutions for turbulent flow by using approximate shear stress relationships. Chapter IX. Flow over Immersed Bodies 21 Summer 2016 ME3560 – Fluid Mechanics Rexcr = 5×105 Turbulent Boundary Layer: If Rex > 5×105 ν 4/5 δ = 0.370 x or U 1/ 5 δ x Ux ν τw Cf = 1 2 ρ U 2 τ w = 0.0288ρ U 2 Re −x1/ 5 C f = 0.0576 Re −x 1/ 5 = 0.370 Re x ; Re x = 1/ 5 C Df FD 0.072 =1 = 1/ 5 2 Re ρ U A L 2 22 Chapter IX. Flow over Immersed Bodies Summer 2016 ME3560 – Fluid Mechanics Rexcr = 5×105 In Summary: Laminar Boundary Layer: If Rex < 5×105 δ =5 νx or U δ 5 Ux = ; Re x = x ν Re x τ w = 0.332U τw Cf = 1 2 ρ U 2 CDf FD =1 2 ρ U A 2 3/ 2 ρµ x 0.664 Cf = Re x CDf 1.328 = Re L 23 Chapter IX. Flow over Immersed Bodies Summer 2016 ME3560 – Fluid Mechanics Rexcr = 5×105 Turbulent Boundary Layer: If Rex > 5×105 ν 4/5 δ = 0.370 x or U 1/ 5 δ x = 0.370 Re x ; Re x = 1/ 5 Ux ν τ w = 0.0288ρ U 2 Re −x1/ 5 τw Cf = 1 2 ρ U 2 C Df C f = 0.0576 Re −x 1/ 5 FD 0.072 =1 = 1/ 5 2 ρ U A Re L 2 24 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 9.3 Drag D CD = 1 2 ρ U A 2 Chapter IX. Flow over Immersed Bodies 25 Summer 2016 ME3560 – Fluid Mechanics 9.4 Lift Typically, the lift is given in terms of the lift coefficient L CL = 1 2 ρ U A 2 •Most common lift-generating devices (i.e., airfoils, fans, spoilers on cars, etc.) operate in the large Re range in which the flow has a boundary layer character, with viscous effects confined to the boundary layers and wake regions. • For such cases the wall shear stress, τw, contributes little to the lift. •Most of the lift comes from the surface pressure distribution. •The distribution, for the most part, is consistent with simple Bernoulli equation analysis. •Locations with high-speed flow have low pressure, while locations with low-speed flow have high pressure. 26 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •A typical device designed to produce lift does so by generating a pressure distribution that is different on the top and bottom surfaces. •For large Reynolds number flows these pressure distributions are usually directly proportional to the dynamic pressure, ρU2/2, with viscous effects being of secondary importance. •Two airfoils used to produce lift are shown. •The symmetrical one cannot produce lift unless the angle of attack, α, is nonzero. •Because of the asymmetry of the nonsymmetric airfoil, the pressure distributions on the upper and lower surfaces are different, and a lift is produced even with α = 0. Chapter IX. Flow over Immersed Bodies 27 ME3560 – Fluid Mechanics Summer 2016 •Since most airfoils are thin, it is customary to use the planform area, A = bc, in the definition of the lift coefficient. • b is the airfoil span and c is the chord length—the length from the leading edge to the trailing edge. •Typical lift coefficients so defined are on the order of unity. That is, the lift force is on the order of the dynamic pressure times the planform area of the wing, L ≈ (ρU2/2)A. •The wing loading, defined as the average lift per unit area of the wing, L/A, therefore, increases with speed. 28 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •Typical lift and drag coefficient data as a function of angle of attack, α, and aspect ratio, AR, are shown. •AR is the ratio of the square of the wing span to the planform area, AR = b2/A. •If the chord length, c, is constant along the length of the wing (a rectangular planform wing), AR= b/c 29 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •In general, CL increases and CD decreases with an increase in AR. • Long wings are more efficient because their wing tip losses are relatively minor than for short wings. •The increase in drag due to the finite length (AR < ∞) of the wing is often termed induced drag. •It is due to the interaction of the complex swirling flow structure near the wing tips and the free stream. 30 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •Although viscous effects and the wall shear stress contribute little to the direct generation of lift, they play an extremely important role in the design and use of lifting devices. •This is because of the viscosity-induced boundary layer separation that can occur on nonstreamlined bodies such as airfoils that have too large an angle of attack 31 Chapter IX. Flow over Immersed Bodies ME3560 – Fluid Mechanics Summer 2016 •As is indicated in the figure, up to a certain point, CL increases rather steadily with the angle of attack. •If α is too large, the boundary layer on the upper surface separates, the flow over the wing develops a wide, turbulent wake region, the lift decreases, and the drag increases. •This condition, as indicated by the figures in the margin, is termed stall. 32 Chapter IX. Flow over Immersed Bodies