ECONOMIC JUSTIFICATION OF INDUSTRIAL ROBOTS MANAGEMENT OVERVIEW
advertisement

ECONOMIC JUSTIFICATION
OF
INDUSTRIAL ROBOTS
MANAGEMENT OVERVIEW
I.
INTRODUCTION
II.
DISCUSSION OF KEY ISSUES IN
ROBOT APPLICATIONS
III. ANALYSIS TOOLS
IV.
SUMMARY
MAJOR DETERENTS TO
ROBOT APPLICATION INVESTIGATIONS
• WHERE TO BEGIN
• IDENTIFYING GOOD APPLICATIONS
• ESTABLISHING RESPONSIBILITIES
• SECONDARY TO MmING PRODUCTION
• MANPOWER
PURPOSE OF THE PRESENTATION
• ATTEMPT TO CLARIFY THE JUSTIFICATION
PROCESS
•
PROV! DE ANALYTICAL TOOLS TO ASSIST
ENGINEERS
• MAKE THE INITIAL INVESTIGATION FASTER
•
DEVELOP A METHODOLOGY FOR THE
INVESTIGATION
4
GOALS
• MORE EFFICIENT USE OF ENGINEERS
• CONSTRUCT TI-IE APPLICATION TO ACHIEVE
THE LOWEST MANUFACTURING COST
• PROVIDE INITIAL DIRECTION (GO/NO-GO)
• IDENTIFY THE BEST APPLICATIONS
5
f ROBOT APPLICATION?]
EQUIPMENT
CAPABILITIES
ROBOT CAPABILITIES
ECONOMICS
-_
CAP ITAL EXPEND nu RES
MACHINE TOOLS OR PROCESS
SAVINGS
PART ORIENTATION DEVICES
R. O. I.
SENSORS
RISK
MAINTENANCE
SPACE R£QU I REMENTS
PRODUCTIVITY
v
ALL OPERATIONS
... , y
ECONOMICS
. . . ,,.....v
CAPAS ILITIES
'
~
II
BEST APPLICATIONS
(~
TECHNICAL FEAS IB ILITY/ECONOM IC FEASIBILITY
RELATIONSHIP
Operations that are technically
teas ible
Ope rations that are econ om ica Ily
feasible
·
Operations that are both technically and economically feasible
ROBOT CAPABILITIES
ROBOTS CAN DO PRACTICALLY ANYTHING YOU WANT
THEM TO DO
ROBOTS CAN DO PRACTICALLY ANYTHING YOU WANT THEM
TO DO AND ARE WILLING TO PAY FOR
WHAT IS ECONOMIC JUSTIFICATION?
- CRITERIA FOR DECISIONS
- RELATIVE MEASURE
·~.INDUSTRY
TO INDUSTRY
• COMPANY TO COMPANY
• FACTORY TO FACTORY
- COMPARATIVE MEASURE
COSTS OF ROBOT SYSTEMS -
Included Items
•
ROBOT
•
FIXlURING AND ORIENTING DEVICES
•
INTERFACING SUPPLIES
•
TRAINING
• SPARE PARTS
•
TOOLING
• CONVEYORS AND RACKS
• MACHINE TOOL REVIS IONS
• SAFETY EQUIPMENT
•
INSTALLATION
•
TAXES
•
FREIGHT
•
DESIGN
•
LESS TAX CREDIT
SAVINGS AND EXPENSES IN NORMAL
ROBOT APPLICATIONS
SAVINGS
EXPENSES
Direct Labor
Maintenance Labor
* Part Redesigns
Farmout Reduction
Direct Material
Quality
'::
WIP
f.c
* Indirect Labor
Energy
Training
* Indirect Material
:~
EITHER WAY
Floor Space
M.E. Support
* Downtime
OSHA Compliance
INTANGIBLES
Scrap Reduction
* Safety
Resale of Old Equip.
Depreciation Costs
* Better Management Control
"'
* Inflation
* Less Hu man Problems
* Step In The Right Direction For Future
* Capacity ,
* Maintaining State of the Art
* Meeting Product Demand
*
ITEMS THAT ARE NOT NORMALLY INCLUDED ON AFE/DCF
UNLESS SPECIFICALLY IDENTIFIABLE
r'T1
x
(/)
-c
MAINTENANCE
D. L + F. B.
z
(/)
TRAINING
WIP
DOWNTIME
QUALITY & SCRAP
I~
I~
FLOOR SPACE
<
ltn
•
OSHA
I~
DIRECT MATERIAL
I~
RESALE OLD EQUIP.
I tn
r'T1
r'T1
(/)
)>
<
-z
C)
(/)
-c
Vl
r'T1
-~
L - - - -- -- -- --
- -
-
·-·-·- - -
ASSUMPTIONS IN ROBOT ANALYSIS
• AN OPERATOR WILL BE ASSIGNED TO
THE OPERATION
• IT IS PREFERABLE THAT THE OPERATION
REMAIN ON INCENTIVE
• THE OPERATOR SHOULD BE GIVEN 130%
INCENTIVE OPPORTUNITY
• SAFETY DEVICES WILL BE SUFFICIENT TO
ALLOW THE OPERATOR AND ROBOT TO
WORK IN THE SAME CELL
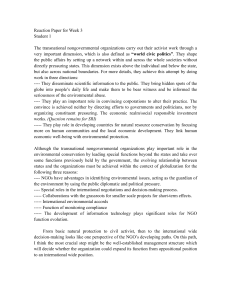
ROBOT WORK ELEMENT DISTRIBUTION
GRAPHIC DIS PLAY
(SINGLE ROBOT SYSTEM)
l________________~Jo
ALL WORK PERFORMED BY THE OPERATOR
f77/fi_llCAR
I
Ia
I.::
OPTIMAL WORK DISTRIBUTION
I
CYCLE TIME
f7/7~R
Ia
I
j
ACTUAL WORK
ASSIGNMENT
CYCLE TIME----+]
V/ffl/_ITJTIZ//Tfl/ll/1R
. . . _I_lo
I-<----
CYCLE T I M E - - - - - 1
W/7/////ZJR
LOST POTENTIAL
MAXIMUM
ROBOT WORK
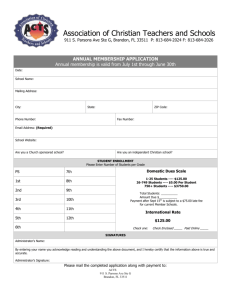
Optimal Division of Total Standard
Minutes (at l 15 Avg. P&F Factor)
K-factor
8
:
7
z
T7
- - ---- -- - _ _[___j___~J..:I_;__~--l----i---+---ll~-l-----1--JL'-+--,Z,__-1·~-,~~~
.J
·77
17
------1-----'-----+----+--------ir--+---+---+---t----'------Y-¥---------l-----1----+----+---+----+---+--f---7,,___~7
-7 --7
i
r
~
z
7
I
7
7
--7----+----- --
-f------+--~
~~~--c~'
7_ ; -----.>--
7
.......
0
..c
0
a:::
6
0
.......
.&
C'C
u
5 1-1-..7
___ ,. ___ --+- ----- --l-------'--+------l---1~
'--vhl7
'--7-V7.-~
0
<(
0
.......
Vl
Q.)
.......
::J
c:
:E
"E
C'C
zy_-;,
~-- - . -~-- - --=-----~ -___ --=4---------l----'---7-'~'-~77,__-~,1--'-1'---~7 ,-7 7 --//,. -- .
-1 if 7_-f- 7_~?-7
7
T7
--r--• 7_,,__..,,__
. ---- -- ---- - - - - ,- - 1 - - -'--
- --- - - - ---+
- ~ -- --~-=-
:i---:
7 :7
7
~y
7
7
'77
77
7'.7 - - ' - - - - + - - - .7
7
-7'7jZ7
v;?- ___ ]_____==+_c _-_ ~~
__
___l_
L ____ _
~----- - --
7
-7~~7 7~ -Y/----L---l--__J_----'J:--~1---'·- - - i -------
7-7 -7 -7
------- . -- --'----
7
7
7
Z-f-• 7 /
7
---- - -
"'C
c:
JS
V>
K FACTOR=
'
Robot Time
Operator Standard Time
:I
Total Standard Minutes to Apportion
Between the Operator and Robot
- -
---
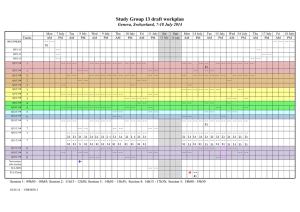
ROBOT ANALYSIS -- U.S. FACTORIES
TOTAL ANNUAL HOURS VS. JUSTIFIABLE CAPITAL EXPENDITURE
(@ % DIRECT LABOR REDUCTION AND % MACHINE UTILIZATION)
13
MORE THAN ONE
ROBOT REQUIRED
(100% MACHINE UTILIZATION)
11
10
9
=
8
TOT
INCf -t--=--b~f-!~;?1~7-f--.~A---:?l,,_-~~-+~'7-+-~7'£--_;_1----l-----i--~:..+---t
(XK)
TE-:---- -+------+---+------+--------
---+-------! ·-----~-- ···-·-
- - - - - - -· --- - · - - -
2 -t-tt-t+.H-~:;.t:;~~+--7"'-~---!---+----J..--+-----1-------+--...;.-----+
--+--+----+----4--~--._
- - - 4 - - -··- - _ __.____._----+---- - -···. -i' -----·-··i
---~- ·- - ·'
+----+----+---!--
1
'
--+-----+---+------<-----·-+ -- ·- -
- : - - ---i-----i
- -- ·- --- --t ----··---- ·---~-- ----- ·-t
-t~/f.~T.n.sfL--.~--+---+----ir----+---+--+--_;,_·
_ __,__ _ _+ _ __., _ _t----·:~-+-------1'I
__...__ __,__ _.. . .___ _~-~:: __:_=t----- --~- :~~--~~ ~ =--~~ :~-~~~-:-:· .~ -~~:.~ -~ -=~-~=-~· ·i
: ::1~: :-: -i o : -~-its=-::·-i o=: l7s= = 2 o: :ib : : z~o: : z7s :: 30o :: 32s ·: JSO
_ _....., ---- ---·---,--·-'---·;-+··--·-- -- - ··· -- -1··------- ···----·--··--···-------- .. - - ~ --· - - ... - - .. ... - --- -- !
--1--~--+--+---t-~~=:::-=-:-:::-t--~=-:-::--:+-:---~~---·-- - ----+
-----t- ---- -- --~-- 1
- ·--,·. ,JUSIIFIAB E ·CAPITAL { _) :··: -; : ·: -:- ~ - ~ : : ·-:-·: ~ : : : ~ : : : : : : :: : .: 1
·
---~:-:-::·· ~ -~-~ ·:!~- :--:· =~ -=~ : :.~ t~~ -~~ ~ ::: j::::
- - + · - - -MACH+NE LOADING - - ·- - :..._ --- -- - -- · - · · · : : : '. ! : : : : . : : : : : : : : : 4 . : : : : : · : : J
.APB.If .l9 0 ..
---1--· --- - .. - .
I
•• ---
-·-
-
-i -··- ··l .. - . ~ . - .. j . .. . '. . .. .
. . .
I
.
I
ROBOT ANALYSIS -- U.S. FACTORIES
TOTAL ANNUAL HOURS VS. JUSTIFIABLE CAPITAL EXPENDITURE
(@ % DIRECT LABOR REDUCTION AND % MACHINE UTILIZATION)
13
MORE THAN ONE
ROBOT REQUIRED
(100% MACHINE UTILIZATION)
12
11
10
9
8
TOT
ANN INC'/
HRS
(XK)
6
5
4
3
1
0
--'---+-- ---··
·--- · ·--
-
· -- · - - . - .. ............ . ..... - - - -....,-- ·· -
~-
-
----
•··· · --- ··
.... · ····- -- -
···- ····- -
~ --· ··-··- ---- -
• • • ·-
t
• ...•
.
!
'
- - - - - - --
.
~=~=:~~:~ =~= ~=~~·l : :·~· : ·=~~=t--=~ A ~rij~y-~-:·:~: · :· : ~-· :I :~ :•
-------4- -- -
- ·- · ··-·--· - "t-··- ..- - - ---·.
•
- ·-
I
- --
. . ··- .
'
'·------·-· ···-
! .
. · - - - ~ - ---·+·
: ~- : -~ j ~ ~=
.. -· -- -
. -- - · -
::_ :-.: : :. ~=-==·
· · ·· -·· ·-1 ····- --
.APB.ILI .19.80
.. . . j . .. - ..
Optimal Division of Total Standard
Minutes (at l 15 Avg. P&F Factor)
K-factor
___·:J:ii1-.:.: ____:
~ : J . : =~ -=..:: -==i-·-~-----J--i---+---+--+--+--+----t:r----11---,---;----.--.jlQi"i"-
.
_g_ .
:Z =-7------i
· 7=-l=--------L
· -- -___...._
~ 1 ' c1. ..l ,__i]",;2 ...i.J"'.
1'1..!d. _I
- --=·--.
. .:. ·----L-----+--+---+---i---t---+---o--r---rY.
'7
JZ7
=--=-----1----'
.. -
-- - ---------------+-----+---+---i----1--..-----t---I.,_
.L _· ___,..f
.L
L
L
- - -·-· -- -- -- -----1--f----l--+---+---+----+-o
L-f'-~f-
i
•: ~
.....,
0
-·-
0
6
.c
.L
.L.
:-.:.::: .:._~::.:...--------+-----.------r---t----r--·'--,7---v-
- ::--_:· :-::::__ ~ :: _-_-____-----1---+-_-_-_--t_-_-_::-__:::-_::::-_::::-_::::-~_::::-_::::_::::.L7Z=7
7
L
_,_.L_ _ _ _._ ____ - · -
·L
IL
_L-
L
77
-
-- -y.g
.....05
_..
. ._
.
L
L
. /1 _
___ _
- t - - -- i
'
..f ::::-7'
17~-=±
:..Z--+x ._-_-:=::-/.!·· ,----Y --------!.L:-==L:::j-- - -==1-==-==
-::-__-::-.·. _---=-~-=:.....;. . ;--------::-_::=:::::~::~:::::::~:__,../...-./....,:a,_.
7.-..,~-7-~
-~-
~
~--.z.-:L
_.-_7_.r-~-t
,--:
.. __ .,...._
~
-- ---t-;---~--~-i~?
!
·
±
_
' _-· :;
. -._-:::::.:.::j ___ · -·· --+----'------t-~----t--f_z-=:r-v~
e::::
-:?----· - ~-~-- ·· ·
0
.....,
.....,
Q)
ro
u
0
.J.. .
----
· - ---- · - -- -
. ---· ___ _,__
.. . - .. .. - - - -- --l
. - · - - -- -' --
-'] 7 / z.L.. .,,L ./- . ~ - ----+--- -- - +------ ·- LL
-z z L - L - . ?~
----j ---.-- --r 7_ 7_ Z Z
.,L____L__----1--------'--t------t- -
.
r
_,-L_--v 7
z z
-- 1 - · -· -
- --t ·-
..I...
zl____,,£_
- --· --
~-:
-
-- -L -· - -- --
Z
lL
L.
_j _:::_:: __
~-~-~~~-~-~~.i---~-~-~-+---+--~--t----- ~---- -- -
------+--___,....
' #-L--1.L. Y. .L 7
.. . . .
-- - c
.LL 1.+-.L~L'--F-L+.--rz.'d:___z...,l:'-:__-t-----1---__.;...--t---t--:----i--t---t--t, ~_::::.::::--t
_ _i____,;i
:.1_- - - -
~ :=~~~-=--=-1~ /ij#/~¥
------ -W.U~.L ·
-1 ___:
·
K FACTOR I=
Robot Time
Operator Standard Time
~ ;-=~~:-+--:-.Ji'-.-+---'-+-~~1---------····
~!
~- - - - - =1
'
:~--_ a-: -: _·. j. .-_:-=_:_=,_--=--=--~~~~=--=~~-+:r=====:=!::=====:+======:t======:t=====:::;:t=======;======:=f=-~==-,+=-=---=-- - -:-'1"~-~·-=-:--~-·~-~j·---~-~-~-:
:-.-:_ __
::
±
--
-
-~--+-~--f-..;..-t---+--+---1----i---+----t------t--------:
_j_
---- - -
~=4·
----
- -~--i---+-_,r-~l--'--1---+------i ----.---< - --., -- -··-' ~
--- ·1 -
----,-
- - . :I
-
-·
- ·-- -~ ---· - - --·--·-
.....
~-===-=t.J.===.it====!~==-=1l-il=,::==t::=.:::::tR::=·=+==-=1'=il:Gf===.::t:r==::J1_~~==.=!r==~it4F=-_,.
--- ---j:!:jt~r--_-
Total Standard Minutes to Apportion
Between the Operator and Robot
ROBOT ANALYSIS -- U.S. FACTORIES
TOTAL ANNUAL HOURS VS. JUSTIFIABLE CAPITAL EXPENDITURE
(@ % DIRECT LABOR REDUCTION AND % MACHINE UTILIZATION)
5
I/
""'
1
A__
V.LL LLZ
3
ZL~ZL
. .Li ,
-1,4+-;/1- LLL_
I
=
fll!TL 'LL.
y :z
z
:I
,
_,,y -
~
;
I
L-
~
-
.
ZL
I
.,,,,.
l -
~_:' ,,, ·~J~L
_;_
,'
T
/
T•
..:.
'
I
~'
/
J1.
'
• .
:J.\_ Dfil'K..._
_;_J_
~~~~~ ~' ~ -~nt;w_
·-.~~ . _:_
···· ······
, -~-
-
~----L~ -~ _:s~~-, -- ~~~-~1Po
~ s-u
~a-===rts-~-==2~o ~=~ts~~~~2~0 : : 215 ~--: _3 Jo-- :-=-=3~s
::_:~~o
+: l
l : :
---------------r-----------i
-,--,---ii--------,------'-+-~~----1_____._----;-----,-__. _: +: ,--i.Jt]S'*'IFIAB.,.E · CAP~ TAL-----{ ICK> - ----+----7----1 ---+--- - - __. ----- .. ----- --~ ------- - -----'
'
-
.
I
.
'
I
I
'!
'
~-----; ~~ --t---------1 ---------- - --f ----- --- ----
;
_ _ ,l_ _ _,_ _ _ _,_~~H- NE l.~1~=-0~ I-+=-¥~- - -· 2=-~- ~ ~:~=~- -
::-< -::==~r~-== ~~-
~-~~-~:~-r-~~==~
~-~- ---~-=-~-' -'"+1~- -~~ ']7~±-.-._·'-~ ~-~ :_: -~ -~ - - -:~ ; -~ -=_ :_- :: ~li :. ~ -:
----'--+·- - ---
--~---+---F ,
---'- ----j
~
,
_ _ __: _ _
· : - - _, --;.-.:. __l___--+--'----'-__;___ -A~SEMBL"'7
----'--'---- -- -- - -- - - ·_:_____:_____:__---:---h ----<-----i t __"_L_: ____; --~ - - -- ; ; - ; ~~____:__J _ __:_ ____:__ - - -- ~~---------- - ------- -------\---- - ----
~ ~ ~ ~ {~.: i ~-:--+--~~-:; -+~1~-WEiJoi~t\i~ PA~iNo : ~ :_: : -:~J;==~~~=- =-~: =~t-- -~-~
. . 1 - . - .
. .• . .
t--·----- .
Optimal Division of Total Standard
Minutes (at l 15 Avg. P&F Factor)
K-Factor
---'
· : :- ~ :-: ___ ~ - · _
·Q
·
~
._.__··_- _·__--_--_--_-_-_-+-
'
_a_ 1..,a_
1:
--i-
'
""A_-;.
!.1. ir
i
-
---c:
~..
~
'LJL-1 AT
_,,,,_
:ui
""Jt
. .: __...:::..:.::-..:==J ------t----+---+---+---+----+---,1---:~'-,_1_,7
. : _:--::·-: ~ ------=f
/
7
..L
-rt...•~
/
1
J
iZ-
y
' ]
·
!
77, ___ ----·
+--· -.
,77 :.=:lT -- --- - --··. 17 -
-?---~~as:
-7 • 7 1 ---
LLL
7
0
.c
0
---
6
: -_
~_-:_ ._-~ -~-._·:- -~_-_~:- ~-1-~--=-----.-_-_--+-
-+--+----'-
-+---7-19
-
/~±=L
_ . .: . 71=7 ~~~~
- ·-----T-i--- -
7-==z-Jl':-=+7--E-•-·
--+--~-~--'---+7-1
a::
0
.$
~
g
5
-<(
0
V ')
Q,)
:::J
c:
:2E
,__-l-'--"-.;.+..~-+---.;....j'=='iF==r==-1
·· . - -:----,
-
--+-
- - . ....
--ii---,----.!---++·-''----i- - ' - i - - -+---1---+---+---+-
--t- --- ----
-- - - - -· ~
-:I '
- -~ -
-
-· ·
- - --·- --___,---,~-+---J---+--:_;_•~-'>1-'-j;-4-+-'-;.;_
• '--iD:..--..
· _;_.-+--.-=I-.--i<---J
-+---.::!o.t---t----".:i.-.1 ---r-··-~ ~- --
Total Standard Minutes to Apportion
Between the Operator and Robot
Total Investment Conversion Chart
%
%
Expense
Salvage
Value
Months
Delay
0
0
~l~
18
0
10
20
~~
12
18
0
~l~
18
0
0~ 1 ~
18
0
ROI
5
10~1~
18
0
20~ 126
18
0
0~ 181 ~
0
10
10~1~
18
0
. zo~ 1 ~
18
Total
Investment
ROI
15
25
35
1. 70
1. 55
1. 40
1. 27
1. 74
1. S8
1. 43
1. 29
1. 77
1. 62
1. 46
1. 32
1. 71
1. S6
1. 40
1. 27
1. 74
1. 59
1. 43
1. 30
1. 78
1. 62
1. 46
1. 32
1. 72
1. 56
1. 41
1. 28
1. 75
1. S9
1. 43
1. 30
1. 78
1. 62
1. 46
1. 33
1. 14
1. 01
. 87
. 76
1. lS
1. 01
. 87
. 77
1. 16
1. 02
. 88
. 77
1. lS
1. 01
. 88
. 77
1. 16
1. 02
. 88
. 77
1. 17
1. 03
. 89
. 78
1. 16
1. 02
. 88
. 77
1. 17
1. 03
. 88
. 78
1. 18
1. 04
. 89
.78
. 85
. 72
. S9
. so
. 85
. 72
. S9
. so
. 85
. 72
. S9
. so
. 86
. 73
. 60
. 50
. 86
. 73
. 60
. 51
. 86
. 73
. 60
. 51
. 87
. 73
. 60
. Sl
. 87
. 74
. 60
. Sl
. 87
. 74
. 60
. 51
HO\
FORMING- SCRAPER BLADES
CUR RENT OPER.ATION
I
O PE~AToR
4-
P4RT /VVM6ERS
SI04
YEARL'/
-z.1+5
STANDA~O
fAJC..E.NTIVE
µtlNUTE S.
#olJ~S
PER..
PAa'tT
Optimal Division of Total Standard
Minutes (at l 20 Avg. P&F Factor)
K-factor
:r <I
:_..__...
'
'
:
I
'
.:r
'
'
I
''
==
,
--r
I
.±
I
t£:::
,,
·7
_L
I
'
'I
f
=:
==
J:
I
'
.
T
_L
~.
r7
-7
:-± ,=zJ_
•
-7-
7_ .
,L
-7-
r7
r
-0
..c
0
a:::
: ::t
=
0
~
ca
u
0
<(
0
7
7
17
717,
V)
u
Q)
:::J
-:z_
7
77
c:
~
7
-v
7
7
1
7
z
''
~
L
;
L
7f777T7
"E
_,,
L
7--!-i--lz-JC-+----+--,-+-~-+----+--
7
Z
7
7
L
:L
;
:
'
':::
ca
"C
c:
J9
V>
:
:
:::;: ,
j
::: . '
.:::;+ :±:I:P:: :-±. .:r. :±
'
'
I
' =t:±
:I . ' ,
'
,
I
J
,
i
•o
,
.
I
. ,
:::
'
'
j
I
I
Total Standard Minutes to Apportion
Between the Operator and Robot
j
J:
:±
I
;
'll"f
1
~
:
HOT FORMING OF SCRAPER BLADES
ROBOT APPLICATION
RACK
D
OPERATOR©
FURNACE
ORIENTATION
TABLE
D
[!]
0-
PRESS
ROBOT
OPTIMAL WORK DISTRIBUTION
.95
I 20
I
MINS.
M IN s
AC TVAL WORK
TO ROBOT
I
TO 0 PE RATO R
D\ST~l BUTI
ON
I. 2 7 MINS TO 0 PER.ATOR
fO.~
"lo LABOR
~EDVcTIOtJ
ROBOT ANALYSIS -- U.S. FACTORIES
TOTAL ANNUAL HOURS VS. JUSTIFIABLE CAPITAL EXPENDITURE
(@ % DIRECT LABOR REDUCTION AND % MACHINE UTILIZATION)
13
MORE THAN ONE
ROBOT REQUIRED
(100% MACHINE UTILIZATION)
12
11
10
9
8
TOT
ANN INC'/
HRS
(XK)
5
1
· - ---+·-
- - - - + - - - + - - ---+
·---+---+--+-<~t-,-..-..---+~-~----+-.--+----__.-- -+---~--+-------+-- -----· -
=~-:-=-~~ ~~~:~
: ~ : 7$ :·:-:--:i
---+---- --~----
·--- -- - .; . . . -
·-
-
··- -
. -· . . . . - . . ··-
-MACH NE
LOADING
o ~-=i -s~.=:i
.:
--- --~ ·
---~
.APRI~ 1980 - --- ·· --·---- --- ---'. _;_
-·-~.-
o~-:-_1
s=~i
; -; .
o::=z?s.=-~~ 2 o~-= -:z7s =:-:- ·3~0 :__:: :::n s__
. ·_
-). -:-:··i1-:---:--:-- -
- - ··-- ··-'-·-- -'-
:.; · - ---·- ·"
i ......, .. - -
-~
- -- -
:
.
:~
. .
j ..
:_ : : ~- :
3fO
·------~------- 1 · ----t--·-
-==-=r=:-=- _--._____. )_ ___
- ----·--i-- - -
.j_.
•
. ·- - - ·- • . ··- -----
j , .... ,
' . - - j------ ...
:·:: :-:-:] =-~~-:
_,-:,·-:-t ------ ·- --· -·-·;---- ---· -· -· ··. -
·
· - · --- ---------
RESULTS:
t I SO, 000
JUSTIFIABLE CAP ITAL
@. -zs?o ROI
&,7%
MUF
LOW HOUR ANALYSIS OVERVIEW
OBJECTIVE:
TO ANALYTICALLY DETERMINE THE YEARLY
HOURS THAT AN OPERATION MUST RUN
BEFORE IT BECOMES ECONOMICALLY
FEASIBLE TO AUTOMATE IT.
LOW HOUR ANAL Y.SIS
EXAMPLE. - WE.LDJNG-
NUMBER OF :'.:>ET VPS PER YEAR 5E T UP TIME FOR OPE.RATION
SET VP TIME FOR ROBOT
-
INCREMENTAL TOOLING COST ROBOT C05T
3/+ 1-4~
'/2
HR
~IS K
- '100 K
DIRECT LABOR COST PLUS
F.B.
-
$15/H-R
PA'l'BACI<. PAC.TOR
-
3.0
PERCENT LABOR REDVCTION
-
PE RC ENT DELAYC:,
20
YEARLY 1-IOURS = 1223
~
Of= PA RT~
-
10.5
LOW HOUR ANAL Y51S
EXAMPLE. - IVlACHtNE. LOADING-
NUMBER OF
~ET UPS
PER YEAR -
12
Yz.
5E T UP TIME FOR OPE.RATION
-
~ET
- V-z. HR
VP TIME FOR ROBOT
HR
INCREMENTAL TOOLING COST - .i4 /<.
- ~75 K.
ROBOT C05T
DIRECT LABOR COST PLUS
-
1 IS/»1
-
'3. O
F.B.
PA '<BACK FAC.TO R
PERCENT LABOR REDVCTION
PERCENT
DELAY~
YEARLY HOURS
it
Of= PARTS
4S
-
=
=
·309. l
37. 51
ZS
ONE ROBOT/ONE OPERATOR
ALL WORK CURRENTLY BE ING PERFORMED
VZ7//77/ZZZZ/ZZ/1/Z/1
I• ROBOT CAPABLE WORK
·I
75
OPTIMAL DISTR I BUT ION 50/50
VZZ/Z/LZ/L/7/LJ
I
k-cvCLE TIME
)
=
50
~
SAVINGS = 50
DUPLICATE SYSTEM (SUB-OPTIMIZATION)
SAVINGS = 100
1100
SYSTEM OPT IM IZAT ION
lWO ROBOTS/ONE OPERATOR
" fZZZ/f/Z/fl7ZZZZZL1 .· ..
-
- -
...
-
-- -
---
...
OPTIMAL DISTRIBUTION
1/3,
113,
V/7//ZZZ/~//7/1
W/Z/77/ZZ777JJ
I
I
I
I<
Cycle
Time = 200
·- -··
Cycle Ti me = 66
SAVINGS = 134
>[
113
66
66
66
EXAMPLE
MULTIPLE ROBOT ANALYSIS
NO.
ROBOTS
A
% SAVINGS
PER OPERATION
B
TOTAL ROBOT
COST
c
SAVINGS
PER SHIFT
1 SHIFT
D
ROI
2 SHIFTS
1
40.5
100
9,584
4.5
15.4
25.0
2.
52.6
200
24,894
8. 0
21. 2
33.2
3
63.0
300
44,724
10. 8
26.0
40.3
4
69.6
. 400
65,880
12.5
29.0
44.9
5
74.3
500
87,910
13.7
31. 1
48.2
ASSUMPTIONS
A.
3 SHIFTS
ROBOT PERFORMS AT OPERATOR'S NORMAL PACE
1. 15 AVG. P&F
1. 15 WAF TOTAL
130% INCENTIVE OP;POR TUNITY
10% OF INC. STD. REMAINS AS "D" TIME
B.
$100, 000 PER ROBOT SYSTEM
$20, 000 SALVAGE VALUE
C.
SAVINGS= 8 HRS/SHIFT X 232 DAYS/YR X 85% UTILIZATION X $15/HR X % SAVINGS
D.
BASED ON NUMBER OF SHIFTS OF CURRENT WORK LOAD
EXAMPLE:
FOUR OPERATIONS - OPERATOR WORK PERCENTAGES
%OPER 1
=
• 90
%OPER2
=
• 25
%OPER3
=
.30
%OPER4
=
•70LL
WITHOUT BALANCING OF
RANDOM WORKCELLS, THESE
OPERATIONS WOULD BE EXCLUDED
FROM ROBOTIC AUTOMATION
DUE TO THE HIGH% OF MANUAL
WORK ELEMENTS •
BY BALANCING, WE WOULD TRY TO RUN JOBS (1) AND (2) TOGETHER,
AND (3) AND (4) TOGETHER.
BENEFITS OF SYSTEMS APPROACH
GREATER SAVINGS
~~...,GREATER
ROI'S
ABLE TO BALANCE LOW ROBOT PERCENT
OPERATIONS WITH HIGH ROBOT PERCENT
OPERATIONS
MAY START EFFECTING OVERHEAD ACCOUNTS
FOR EVEN GREATER SAVINGS
ADVANTAGES OF ANALYTICAL TOOLS
TEST SENSITIVITY
KNOW WHAT THE VARIABLES ARE
CONCENTRATE ON IMPORTANT VARIABLES
SUMMARY OF ANALYTICAL TOOLS
USE
TOOL
OPTIMAL DIVISION OF
WORK ELEMENTS
BALANCE WORK ELEMENTS
TO MAXIMIZE ROB OT AND
OPERATOR UTILIZATION
ROBOT ANALYSIS
DETERMINES JUSTIFIABLE
CAPITAL EXPENDITURE,
TOTAL HOURS, OR
% REDUCTION
LOW HOUR ANALYSIS
HELPS ANALYZE AUTOMATION
OF LOW HOUR OPERATIONS
SYSTEMS ANALYSIS
FOR MULTIPLE ROBOT
APPLICATIONS
EXPENDITURE
CONVERSION CHART
CONVERTS JUSTIFIABLE
CAPITAL AT VARYING ROI'S
AND START-UP DELAYS
.
ROBOT APPLICATION LOGIC CHART
Part Numbers
Quantities
Incentive Standards
Machine Standards
Analyze Current Operation
Define Factory Criteria
Planning Year
Shifts/Day
Utilization Goals
Days/Year
Production Level
Analyze Future Operation
New Part Numbers
Part Redesigns
Long Range Plans
Check Initial Feasibility
l Determine Equipment
Requirements
I
Management Review
Parts Routing
Man/Machine Work Dist.
Combined Operations
Floor Layout
Part Families
Veri~ Part Numbers
l
Machine Utilization
Robot Utilization
I
Detailed Evaluation
Evaluate Alternatives
I
Sensor Interface
System Controller
I
Reclaim Work
Estimate Incentive Standards
Direct Overhead
l
Estimate Project Cost
I
Test Economic Feasibility
Pick & Place Devices
Servo Controlled Robot
Hard Automation
Methods hnprovements
Alternative Method
Calculate ROI
.l
Formulate Production &
hnplementation Plans
Management Review
Request Budgetary Quotes
I
Experimentation
Write Performance
Specifications
.l
Request Quotations
_l_
Evaluate Quotes &
Select Vendor
Prepare & Submit AFE
:I
Establish Support Services
Required
l
Issue Purchase Orders
I
Install Equipment
Preventative Maintenance
Plan
Inspection Plan
Tooling & Gages
Equipment & Relocation
Utilities
Training
Programming
Incentive Standards
Material Handling
· suMMARY
• ANALYTICAL TOOLS ARE AVAILABLE TO ASSIST ENGINEERS
WITH ROBOT INVESTIGATIONS
• ROBOTS DO NOT HAVE" TO PERFORM ALL TASKS CURRENTLY
BEING PERFORMED BY OPERATORS
• MULTIPLE ROBOTIC SYSTEMS PROVIDE BENEFITS THAT MAY
NOT BE OBTAINED IN SINGLE ROBOT SYSTEMS
• ROBOTS CAN WORK WITHIN THE DEERE INCENTIVE SYSTEM
• OPERATORS ARE AFFORDED GOOD INCENTIVE OPPORTUNITY