Proceedings of the Twenty-Third International Florida Artificial Intelligence Research Society Conference (FLAIRS 2010)
Using Intelligent Agents to Build Navigation Meshes
D. Hunter Hale, G. Michael Youngblood, and Nikhil S. Ketkar
University of North Carolina at Charlotte
Dept. of Computer Science, College of Computing and Informatics
9201 University City Blvd., Charlotte, NC 28223-0001
{dhhale, youngbld, nketkar}@uncc.edu
open space regions of a navigation mesh it is assured that
the object is not colliding with the world geometry. Furthermore, if the position of an object is known from the last
frame it is highly probably that the object is still in the same
region in the navmesh or in one of the neighboring regions
and can quickly be located using a breath-first search starting at the object’s last known position.
However, there are some problems with using a navigation mesh in a virtual environment. In order to generate
the navigation mesh the configuration of the obstructions
present in the world must be known in advance. This will obviously cause a problem if the target virtual environment is
being procedurally generated at game initialization or even
worse if the world is being procedurally expanded as players
or agents move outside the existing world bounds. In addition, when agents are provided with a full navmesh at the
initiation of a game or simulation it gives them full knowledge of the environment. This makes sense if the agent is
moving through an area they would logically have traversed
before (e.g., a guard in a building would be familiar with the
building), but does not make sense for agents that should be
ignorant of the areas they are entering (e.g., a rescue worker
entering a building they have never been in before). Such
extra knowledge can cause the agents to behave in ways a
person would not behave and this reduces the believability
of the agent.
These problems have prevented the use of navigation
meshes in situations where the layout of the virtual world
was unknown or unknowable prior to running agents in the
world. We will present an algorithm that provides a solution to these problems and allows for the dynamic construction of a navigation mesh based on information gathered by agents in the world. We do this without sacrificing the benefits a navigation mesh provides to agents. At
the same time agents are moving around through the world
building and updating the navigation mesh they are querying and planning based on their current understanding of the
navigation mesh. We accomplish this by using the Dynamic
Adaptive Space Filling Volumes (DASFV) algorithm (Hale
and Youngblood 2009a) combined with sensors that are integrated into each agent to detect incorrect classifications of
space in the navigation mesh versus the actual world geometry. In this paper we will present a brief overview of DASFV
and then a new algorithm which builds of the DASFV frame-
Abstract
We present a novel algorithm that allows agents to discover
a navigation mesh for an environment as they move through
the environment. The Navigation-Mesh Automated Discovery (NMAD) algorithm works by constructing its best guess
for the navigation-mesh of a game level and then refines it
when the agents moving through the world using the navigation mesh encounter unexpected or unknown obstacles. Using this algorithm, agents can enter a world in which they
know nothing about, while still enjoying all of the advantages
of a navigation mesh for path planning. We validated the effectiveness of this technique by showing that for both random
and deliberative searches through multiple game worlds the
error present in the best guess approximation the navigation
mesh generated and maintained by NMAD converges to zero.
Introduction
How to represent a game or simulation world to an agent is
one of the major decisions when using embodied agents in
virtual worlds. A good representation will provide benefits
to both the agents for navigation and reasoning, and possibly to other portions of the game engine. On the other
hand, a poorly chosen representation can confuse or hinder agents attempting to traverse the virtual world (Tozour
2004). In recent years the navigation mesh has become the
primary world space representation of choice for agents in
virtual worlds (McAnils and Stewart 2008). The navigation
mesh or navmesh is a world space representation that divides the walkable space in the world into some number of
well-defined convex regions. The adjacencies of these convex regions of open space are then calculated and used to
construct a graph of connectivity between convex regions.
Each region is a node on the graph and if two regions share
a common edge in space, they are connected by an edge.
Navigation meshes work well for agent navigation by allowing path finding algorithms to determine which regions
hold the origin and destination points and then performs a
search on the connectivity path to determine which regions
to pass through. In addition, navigation meshes can assist
with tasks beyond simple agent navigation. For example,
collision detection can be accelerated by taking advantage
of the navigation mesh. By locating an object in one of the
c 2010, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
453
work to allow agents to discover the navmesh for the environment they operate in.
unit in the direction of that faces normal. When either type
of region encounters an obstruction (either another growing
region or world geometry) if the region is perfectly adjacent
to the obstruction it will stop growing in the direction of that
face. However, if the growing region is not perfectly adjacent to the obstruction the algorithm calls for the insertion
of another face into the region to better approximate the obstructing geometry. The insertion of extra faces allows the
quads of PASFV to become five sided or higher order polygons, and the cubes of VASFV to become seven sided or
higher order polyhedrons. After all the regions in the world
have grown to the maximum possible extent, the algorithm
will attempt to place more unit quads or cubes into the world
to fill any open space adjacent to existing regions. These
new regions then grow and expand outward until they collide
with obstructions and once all of them have stopped growing they are allowed to generate more new regions. This cycle of grow as much as possible and then placement of new
regions continues until no more regions can be placed, at
which point the world will be fully decomposed. For more
details on these algorithms please see (Hale, Youngblood,
and Dixit 2008) and (Hale and Youngblood 2009b)
The second half of the DASFV algorithm uses the navigation mesh generated by either PASFV or VASFV as a
starting point and DASFV modifies this navigation mesh in
response to changes in the simulation environment at runtime. As the underlying geometry of the game or simulation environment is altered (e.g., walls are demolished or
buildings collapsed into formally open areas) the navigation
mesh is also updated in real time to reflect the current state
of the world. It accomplishes these updates by first adding
or removing geometry to reflect the new game environment.
Then it rebuilds the decomposition of the world by placing
new regions to fill any holes in the navigation mesh and running either PASFV or VASFV. Once these new regions have
been placed in the world and allowed to grow and seed fully,
the connectivity between affected regions can be regenerated
to produce an effective navigation-mesh. Using DASFV it is
possible to generate a high quality navigation mesh for dynamic environments that can be applied to multiple uses in a
game or simulation world. These updates are made assuming perfect knowledge of the world, and because of this they
do not reflect the restricted knowledge agents in the world
should have based on their sensory limitations.
Related Work
We are not aware of anyone doing previous work in attempting to dynamically learn navigation meshes using agent
movement in a virtual environment. However, the task of
map learning (Thrun et al. 1998; Kuipers and Byun 1987;
Youngblood, Holder, and Cook 2000; Millán and Torras
1992; 1992; Yamauchi 1998) in robotics is intimately related
to the task of dynamically constructing and updating navigation meshes. Map learning involves one or more robots
exploring a physical environment and building an abstract
representation of the environment. The similarity between
map learning and dynamically generating navigation meshes
is that both the tasks involve building an abstract representation, which will allow for better path planning in future.
The critical difference is that in the case of map learning,
the robots are limited by their sensors and cannot accurately
perceive the exact position and the dimensions of the objects
they have collided with. This makes the problem of map
learning much more challenging than dynamically building
a navigation mesh as there is an inherent uncertainty and
noise in the percepts.
Methodology
The primary contribution of this paper is the NavigationMesh Automated Discovery (NMAD) algorithm, which allows agents to discover the navigation mesh for a game level
while traversing the level. This algorithm works by making
an initial assumption that the world is empty and generating an appropriate navigation mesh for this empty world.
As the one or more agents move through the world, each
agent will detect and report any obstructing geometry (objects) they encounter. If this newly discovered geometry is
not present in the navigation mesh then the Dynamic Adaptive Space Filling Volume (DASFV) algorithm will update
the mesh. As these agents move through the world discovering geometry, the current decomposition (a decomposition
is a breakdown of obstructed and open space in the game
world in a navigation mesh) will eventually converge on the
ideal decomposition.
Dynamic Adaptive Space Filling Volumes
Navigation-Mesh Automated Discovery
The Dynamic Adaptive Space Filling Volumes (DASFV)
algorithm is a two part algorithm (Hale and Youngblood
2009a). The first part is a form of the Adaptive Space Filling Volume Algorithm (either Planar Adaptive Space Filling Volume (PASFV) or Volumetric Adaptive Space Filling
Volume (VASFV)) depending on whether DASFV is being
executed on a 2D representation of a game world (PASFV)
or the actual 3D geometry of the world (VASFV). This first
part of DASFV generates an initial navigation mesh in the
following manner.
Both PASFV and VASFV initially seed a grid of unit sized
regions, quads in the case of PASFV or cubes for VASFV,
into the open space in the world. These regions are then provided an iterative chance to expand each of their faces one
Navigation-Mesh Automated Discovery is an extension of
the DASFV algorithm to represent the limited knowledge
each agent or group of agents’ posses about their local environment. The NMAD algorithm as shown in Algorithm 1
begins by initializing an empty navigation mesh composed
of a single region that covers all possible negative (walkable) space areas present in the world. It also incorrectly
classifies all of the positive (obstructed) space areas present
in the world as negative space. While this navigation mesh
is inaccurate, it is the most accurate navigation mesh it is
possible to create with no knowledge about the world. The
accuracy of the navigation mesh will improve with the addition of positive space locations discovered by the agents.
454
Once the initial one region navigation mesh has been constructed, the agents present in the world can use it for navigation as shown in Figure 1a and 1b. Each agent present
in the world is modeled as having a individually defined detection range to notice positive space obstructions. As these
agents move through the world, they will encounter positive
space obstructions as shown in Figure 1c.
When a new positive space region enters the detection
range of an agent then one of two things will happen depending on how the world is represented. If the positive
space objects were constructed in a monolithic manner, (e.g.,
one positive space object represents an entire building) then
the positive space object will need to be sliced into smaller
components. We do this slicing because the detection range
of an agent is representative of the agent’s ability to see the
world, and it does not make sense that by seeing one corner
of a building the agent would become aware of the entire
extent of that building. This can either be done in advance
by creating preset splits in the object or at runtime by carving off sections of an obstruction via polygonal subdivision.
However, if the positive space objects are not constructed in
a monolithic manner and instead are created from smaller
building blocks then the blocks can be directly consumed
by NMAD without subdivision. For dynamically generated
worlds the positive space objects list will be derived from the
components used to create the world and can be subdivided
based on how they would be rendered.
Once a positive region has been identified then DASFV is
used to insert the new positive space into the existing navigation mesh with the minimal possible disruption to the navigation mesh as shown in Figure 1d. DASFV works by first
locating areas of negative space that intersects the area of
the positive space we are adding and then removing them.
The positive space region is then inserted into the navigation mesh. The negative space regions adjacent to the ones
that were removed are then allowed to reseed the world with
more regions to fill the newly vacated areas. These newly
placed regions then grow as much as possible and can generate more regions if needed to ensure that all of the newly
vacated space is fully decomposed.
The algorithm then waits for another positive space region to be detected. Even if all of the positive space regions present in the world have been detected, the algorithm
can continue to run at which point it becomes a form of localized DASFV as only changes in the world geometry that
pass within the agents detection area will be reflected on the
navigation-mesh. This means that every agent on the map is
not instantly aware of a new door being created in a wall or
a passageway being closed off by rubble.
Finally we have made three improvements to the base
NMAD algorithm. First, when no changes are detected in
the world the navigation mesh quality can be improved by
combining adjacent regions when the resulting new region
would be still be convex. Doing this results in a smaller,
more compact navigation mesh while amortizing the cost
of these improvements across multiple agent update cycles.
This reduces the search space present in the navigation mesh
and thereby speeds up queries. Secondly, more than one
agent can feed information into the NMAD algorithm. It is
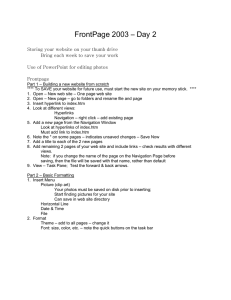
Figure 1: This collection of images shows a sample agent
traversal and discovery of positive space. In image (a) we
see the actual state of the world. The agent is present in the
lower left corner and there is a single positive space obstruction (shaded gray) in the upper right. (b) shows the initial
view of the world as the agent perceives the world through
the navigation mesh. The agent’s detection area is shown
as the (green) circle. Since no negative space objects have
been discovered, the navigation mesh is a single region covering the entire world (blue). (c) shows the agent moving
and discovering a positive space obstruction. At this point
the obstruction will be added to the navigation mesh. (d)
shows the status of the navigation mesh after the addition of
the positive space region discovered in (c).
455
The agent randomly chose destinations in what it believed
to be unoccupied space somewhere in the level. Navigation
to these randomly selected points was controlled by two distinct methods. The first local navigation method was used
when both the target location and the agent were located in
the same region of the navigation mesh. In this case, the
agent will move in the direction of the destination at a normal walking pace. The second form of navigation option
occurs when the target point location and the agent are in
different regions of the navigation mesh. In this case, the
agent searches the navigation mesh to locate a path from its
current location to the goal region. This path is then stored
and the agent will move through the centers of the shared
edges between connected regions on this path. When the
agent is in the same region as its target and it enters local
navigation mode. It is worth mentioning that for simplicity
of implementation the agent uses a breadth first search to
find a path rather than a more complicated best first search
algorithm.
Our agent implemented the NMAD algorithm presented
in this paper to update the navigation mesh as it moved
through the world. We performed 10 passes through this
world where we measured the error present in the navigation mesh in the form of incorrectly classified regions. One
of these passes through the world is illustrated in Figure 4.
We assumed that all of the negative space and discovered
positive space would be correctly decomposed because the
basic algorithm underpinning NMAD generates near perfect
coverage (except for completely disconnected regions which
will not be represented in the navigation mesh) spatial decompositions to use as navigation meshes. Recall that initially, and until it learns otherwise, the NMAD algorithm
considers all unknown space to be negative space. This
means that the only incorrectly classified regions would be
positive space regions that the agent has not yet discovered.
Initially, since the agent starts with no knowledge of its surroundings all of the geometry in the world was incorrectly
classified giving our algorithm a one hundred percent misclassification rate at time 0. We then measured the misclassification percentage at ten second intervals while the agent
wandered the world on each of the 10 passes we performed.
The results of this experiment are presented in Figure
2. The incorrect classification quantity converged on zero
quickly taking on average 225 seconds.
After conducting ten walks through the same world using
a random movement agent, we then implemented an agent
who performs a spiral pattern from the center of the world
outward. This agent running the NMAD algorithm was then
allowed to traverse five randomly generated worlds. These
worlds contained between six and twelve randomly placed
and sized obstructions. In addition, the agent’s speed was increased to 3.6 meters per second in order to reduce the time
required to run this experiment. The graph shown in Figure 3 shows the results of this experiment. The agents spiral
pattern was designed such that the entire world would pass
through the agent’s visibility radius so if NMAD is working correctly all space in the world will be correctly classified. From this graph, we see that NMAD will discover
and correctly classify all of the space in the world within 90
Algorithm 2: The NMAD algorithm loop
/* The NMAD algorithm is generally
called from inside the agent
class. and is assumed to have
access to all of the agent local
variables */
/* Check to see if any unfound
positive space objects are within
range of the agent */
List F oundP ositiveSpace;
for N ewP osSpace in World do
if Agent.CanSee(N ewP osSpace) then
F oundP ositiveSpace.add(N ewP osSpace);
if F oundP ositiveSpace.size() != 0 then
/* We found new positive space
areas */
for N ewP osSpace in P ositiiveSpaceList do
/* Insert the positive space
into the navmesh */
N avigationM esh.insert(N ewP osSpace);
/* Regrow the affected areas with
DASFV */
N avigationM esh.regrow();
/* Rebuild the connectivity */
N avigationM esh.reconnect();
else
/* Clean up the navmesh instead */
N avigationM esh.cleanup();
possible for many agents to simultaneously search for positive space obstructs rather than one and by exploring the
world with multiple agents it is possible to converge on a
perfect decomposition faster. Finally, two or more separate navigation meshes can be maintained along with separate groups of agents who query and update just their own
navigation mesh. This produces the effect of creating two
or more teams of agents each with their own unique understanding and view of the game environment.
Experimentation
We performed a series of evaluations to asses whether the
NMAD algorithm correctly built a navigation mesh based
on an agents observations of the surrounding positive space
obstructions. To perform these experiments we constructed
a sandbox test environment. This environment consisted of
7225 meters square (85m * 85m) of open space that the
agent could traverse. This is roughly the size of two football fields placed side by side for comparison. This world
was then randomly populated with obstructions. The obstructions were composed of three different sizes of cubes (1
meter, 2 meter, 5 meter). The cube placement was restricted
such that two cubes cannot overlap each other. An agent was
then placed into the world. This agent had a detection radius
of 10 meters for obstructions. The test agent moved at a rate
of 1.25 meters per second. At this speed traversing the level
along an edge would take would take 68 seconds.
456
Conclusion
Our Navigation-Mesh Automated Discovery algorithm provides an effective way to generate navigation meshes in
worlds where the geometry of the environment is not known
in advance. By dynamically creating a navigation mesh
based on information discovered by agents traversing the
virtual world, we are able to produce navigation meshes for
worlds that previously have been impossible to define in advance (e.g., procedurally generated worlds). The navigation
meshes provide an agent with information from the moment
the simulation or game starts and will continue to improve
as agents move through the world. By supporting multiple
agents or different groups of agents we provide a method for
a team of agents to explore an area or to have two or more
agents each maintain their own view of the world. In short,
by using the NMAD algorithm navigation meshes can be
generated on demand without any knowledge of the world
they represent and improved as agents move through the
world.
Figure 2: A graph showing the convergence of incorrectly
classified positive space regions to zero over time averaged
accross 10 random walks through the world by an agent. The
y-axis gives the error as a percentage of incorrectly classified positive space in the world while the x-axis shows the
traversal time. The bars on the graph provide the standard
deviation across the multiple agent traversals; the standard
deviation is rather large because the random nature of the
agents movement can quickly discover all the positive space
in the world or rather slowly.
Acknowledgments
This material is based on research sponsored by the US
Defense Advanced Research Projects Agency (DARPA).
The US Government is authorized to reproduce and distribute reprints for Governmental purposes notwithstanding
any copyright notation thereon. The views and conclusions
contained herein are those of the authors and should not be
interpreted as necessarily representing the official policies
or endorsements, either expressed or implied, of DARPA or
the US Government.
seconds.
References
Hale, D. H., and Youngblood, G. M. 2009a. Dynamic updating of navigation meshes in response to changes in a game
world. In Florida Artificial Intelligence Research Society
Conference.
Hale, D. H., and Youngblood, G. M. 2009b. Full 3D Spatial
Decomposition for the Generation of Navigation Meshes. In
Artificial Intelligence and Interactive Digital Entertainment
(AIIDE).
Hale, D. H.; Youngblood, G. M.; and Dixit, P. 2008.
Automatically-generated Convex Region Decomposition for
Real-time Spatial Agent Navigation in Virtual Worlds. In
Artificial Intelligence and Interactive Digital Entertainment
(AIIDE).
Kuipers, B., and Byun, Y. 1987. A qualitative approach to
robot exploration and map-learning. In Spatial Reasoning
and Multi-Sensor Fusion: Proceedings of the 1987 Workshop, October 5-7, 1987, Pheasant Run Resort, St. Charles,
Illinois; Sponsored by AAAI, 390. Morgan Kaufmann.
McAnils, C., and Stewart, J. 2008. AI Game Programming
Wisdom 4. Charles River Media. chapter 2.4 Intrinsic Detail
in Navigation Mesh Generation, 95 – 112.
Millán, J., and Torras, C. 1992. A reinforcement connectionist approach to robot path finding in non-maze-like environments. Machine Learning 8(3):363–395.
Figure 3: A graph showing the convergence of incorrectly
classified space to zero over 5 spiral searches through randomly generated worlds. The percentage of misclassified
positive space present in the world is shown on the y-axis
while the x-axis shows the agents travel time in seconds.
The primary purpose of these two experiments is to show
that the NMAD does correctly classify all of the space
present in a game world. In both the random pathing and
the random world generation experiments the misclassification in the navigation mesh eventually reached zero. By
converging to zero error across many different traversals of
the world, we show that the algorithm does consistently and
reliably classify all of the space in the game world.
457
Figure 4: This collection of images was taken during one of the test runs of the algorithm. The agent is the small gray figure in
the middle of the green circle. The green circle represents the range of the agent’s ability to detect errors in its navigation mesh.
The randomly colored areas in the figure are regions of the navigation mesh. The obstructions are visible as boxes sitting above
the decomposition. Image (a) shows the initial state of the algorithm. In this image the navigation mesh (blue) assumes that
the entire world is walkable and can be represented as a single region. In Image (b) the wandering agent has encountered the
first positive space obstruction. Image (c) shows NMAD as it is the process of building new regions for the navigation mesh.
The grid texture is negative space that has not yet been claimed by any decomposition. Normally this section of the algorithm
would run almost instantly but the it was intentionally slowed down to capture this image. Image (d) shows the final navigation
mesh after all of the positive space obstructions have been discovered and correctly classified.
Thrun, S.; Bucken, A.; Burgard, W.; Fox, D.; Frohlinghaus,
T.; Hennig, D.; Hofmann, T.; Krell, M.; and Schmidt, T.
1998. Map learning and high-speed navigation in RHINO.
AI-based Mobile Robots: Case studies of successful robot
systems. MIT Press, Cambridge, MA.
tiple robots. In AGENTS ’98: Proceedings of the second international conference on Autonomous agents, 47–53. New
York, NY, USA: ACM.
Youngblood, G. M.; Holder, L. B.; and Cook, D. J. 2000.
A framework for autonomous mobile robot exploration and
map learning through the use of place-centric occupancy
grids. In ICML Workshop on Machine Learning of Spatial
Knowledge.
Tozour, P. 2004. AI Game Programming Wisdom 2. Charles
River Media. chapter 2.1 Search Space Representations, 85–
102.
Yamauchi, B. 1998. Frontier-based exploration using mul-
458