Fixing a Hole in Lexicalized Plan Recognition Christopher W. Geib
advertisement

Plan, Activity, and Intent Recognition: Papers from the 2011 AAAI Workshop (WS-11-16)
Fixing a Hole in Lexicalized Plan Recognition
Christopher W. Geib
School of Informatics
University of Edinburgh
10 Crichton Street,
Edinburgh, EH8 9AB, Scotland
cgeib@inf.ed.ac.uk
assumptions, conditional probabilities for each goal can be
computed. If a particular goal of interest does not occur in
any of the explanations, ELEXIR assigns a conditional probability of zero to the goal.
Unfortunately this can prevent the algorithm from considering some goal hypotheses that have a significant amount of
evidence in their favor. Since a goal is only introduced to an
explanation when the plan anchor is observed, and this can
be quite late in a sequence of observations, the assignment of
zero probability to those plans whose anchors have not been
seen can cause significant problems for partial sequences of
observations. In the case where we only have a proper prefix
of the entire sequence of observations, the agent may have
performed many of the actions that lead up to or enable a
goal of interest but have still not executed one of the plan’s
anchors. Thus, there may be a sizable amount of evidence
that the actor is performing the goal. However, since the plan
anchor has not been observed, Geib’s algorithm is unable to
take this into account.
Rather than extending the ELEXIR algorithm, this paper
will advocate a heuristic metric for the likelihood of an individual goal based on testing each explanation for the possible contribution of its actions to a desired goal. The rest
of this paper is organized in the following manner. First, we
will provide more formal background on the ELEXIR algorithm and its limitation. Then we will discuss the heuristic
metric and some experiments in using this metric. Then the
paper will close with a discussion of related work and the
limitations and applicability of the work
Abstract
Previous work has suggested the use of lexicalized grammars
for probabilistic plan recognition. Such grammars allow the
domain builder to delay commitment to hypothesizing high
level goals in order to reduce computational costs. However
this delay has limitations. In the case of only partial observation traces, delaying commitment can prevent such algorithms from forming correct conclusions about some goals.
This paper presents a heuristic metric to address this limitation. It advocates computing the maximum change in conditional probability across all the computed explanations given
the observations explicitly considering a goal of interest.
Introduction
Plan Recognition is usually defined as the problem of inferring which plans, from a given plan library, an agent is executing based on observations of their actions. (Geib 2009)
suggests using lexicalized grammars to encode the plan libraries for recognition. The use of lexicalized grammars
moves all domain specific structural information about plans
into the lexicon and encodes this information in rich syntactic structures associated with particular observable actions
called plan heads. For example, a plan lexicon might associate with the observation of the single action of brewing
tea much of the abstract plan structure for a plan for having
afternoon tea.
Instead of calling these actions heads, this paper will use
the term plan anchors for the same concept. This terminological shift is more in line with use in the formal grammar
and natural language research communities and better captures the intuitions of the action’s role as grounding the plan
in a single, highly diagnostic observable. This is just a terminological change and, as we will see, does not effect the
underlying theory or definitions.
(Geib 2009) describes the ELEXIR plan recognition system that uses such lexicalized grammars to represent the
plan library. At a high level, ELEXIR recognizes plans by
building a complete and covering set of explanations for the
observations (based on the plan structures in the lexicon)
and then establishes a probability distribution over the explanations. On the basis of this distribution, under a set of
Encoding Plans for Recognition
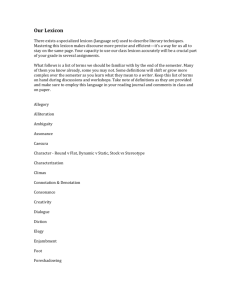
Consider the simple abstract hierarchical plan drawn as a
partially ordered AND-TREE shown in Figure 1. In this
a
c 2011, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
b
c
d
Figure 1: An abstract plan with partial order causal structure
10
plan, to execute action G the agent must perform actions A,
B, C, and D. A and B must be executed before C but are
unordered with respect to each other, and finally D must be
performed after C.
We will now show how to use Combinatory Categorial
Grammars (CCG) (Steedman 2000), to encode this plan for
use in ELEXIR. To represent this plan in a CCG, instead of
context free grammar style production rules, each observable action is associated with a set of syntactic categories.
CCG categories are combined into higher level plan structures using combinators (Curry 1977). ELEXIR only makes
use of three combinators defined on pairs of categories:
rightward application:
leftward application:
rightward composition:
where X and Y are categories, and α and β are possibly
empty sets of categories.
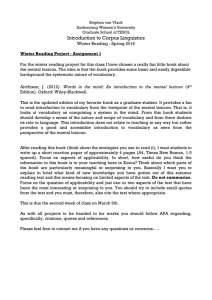
To see how a lexicon and combinators parse observations
into high level plans, consider the derivation in Figure 2 that
parses the sequence of observations: a, b, c. As each obser-
Definition 1.1 A set of syntactic categories, C, is defined
recursively as:
Atomic categories: as a finite set of basic action categories. C = {A, B, ...}.
Complex categories such that, ∀Z ∈ C, and non empty set
{W, X, ...} ⊂ C then Z\{W, X, ...} ∈ C and Z/{W, X, ...} ∈ C.
a b
c
A B (G/{D})\{A, B}
<
(G/{D})\{A}
<
G/{D}
Complex categories represent functions that take a set of arguments ({W, X, ...}) and produce a result (Z). The direction
of the slash indicates where the function looks for its arguments. We require the argument(s) to a complex category be
observed after the category for forward slash, or before it for
backslash in order to produce the result action.
Thus, an action with category A\{B} is a function that results in performing action A when an action with category B
has already been performed. Likewise, A/{B} is a function
that results in performing A if an action with category B is
executed later.
Figure 2: Parsing Observations with CCGs
vation is encountered, it is assigned a category on the basis
of the lexicon. Combinators then are used to combine the
categories. If we observe all of the actions of a plan, the action of the combinators on the observed action’s categories
should produce an instance of the root-result of the executed
plan. In this case, we are missing an observation of d and so
will not expect just the root-result, G, but instead a complex
category.
First, a is observed and assigned A and no combinators
can be applied. Next we observe b, and it is assigned B.
Again, none of the combinators can be applied. Notice, all
the hierarchical structure from the original plan for achieving G is included in c’s category. Thus, once c is observed
and assigned its category, we can use leftward application
twice to combine both the A and B categories with c’s initial
category to produce G/{D}, that is a function with result G,
that is looking to its right for an occurrence of a D.
Definition 1.2 We define a plan lexicon as a tuple PL =
Σ, C, f where, Σ is a finite set of observable action types, C
is a set of possible CCG categories, and f is a function such
that ∀σ ∈ Σ, f (σ) → Cσ ⊆ C.
where Cσ is the set of categories an observation of type σ
can be assigned. We may provide just the function that maps
observable action types to categories to define a plan lexicon. For example:
a := A,
b := B,
c := (G/{D})\{A, B},
X/α ∪ {Y}, Y ⇒ X/α
Y, X\α ∪ {Y} ⇒ X\α
X/α ∪ {Y}, Y/β ⇒ X/α ∪ β
d := D.
defines one plan lexicon for our example plan in Figure 1.
ELEXIR Background and Problem
Definition 1.3 We define a category R as being the root or
root-result of a category C if it is the leftmost atomic result
category in C.
This section provides only a brief outline of the ELEXIR algorithm. A full discussion of the algorithm is given in (Geib
2009), and the interested reader is referred there for more
details. This discussion will only present sufficient details
for us to understand a particular limitation of the algorithm.
ELEXIR views the problem of plan recognition as one of
weighted model counting. It uses a CCG action lexicon and
parsing as the formalism behind and method for building the
models. In this case, the models that are counted are hypothesized explanations for the observed actions. Therefore, in
the following, we will use the terms models and explanations
interchangeably.
For example, G is the root-result of (G/{D})\{A, B}. Further,
Definition 1.4 we say that observable action type “a” is a
possible anchor of a plan for G just in the case that the
lexicon assigns to “a” at least one category, C, whose rootresult is G.
In our lexicon, c is a possible anchor for G.
This formulation of CCGs is closely related that of
(Baldridge 2002) in allowing sets of arguments to categories.
Sets of arguments are critical for our treatment of partial ordering in the plan. For example, the first argument to c’s category is the leftward looking set {A, B} representing the partial ordering of these actions before C in the original method.
Notice that the next argument to c’s category is a rightward
looking singleton {D} indicating that the it must be observed
later.
Definition 1.5 We define an explanation, exp, for a sequence of observations, σ1 ...σn , given a plan lexicon as a
sequence of CCG categories that result from parsing the observations according to the lexicon.
Such a explanation is a short hand for the much more
complex derivation structure that could be built by the action
11
of a probability distribution over the possible categories to
which a given observation can be mapped in the lexicon.
In NLP such probabilities are usually learned using large
corpora of parsed text(Clark and Curran 2004).
The second product represents the prior probability that
the root-results of the current explanations will NOT be
combined with other categories to achieve other results, but
instead represent the final goals of the actor. These priors are
also assumed to be in the lexicon. Details and an argument
for this formulation are provided in (Geib 2009). We refer
the interested reader there for more details.
of the combinators on the categories during parsing. However, for our purposes it will suffice to merely identify the
resulting categories and their ordering. Thus, in Figure 2,
[G/{D}] is one possible explanation for the observations. As
a final piece of terminology,
Definition 1.6 we will refer to any root-result of a category
in an explanation as a goal of the observed agent given the
explanation.
ELEXIR produces explanations by assigning to each observation each of its possible lexical categories. It then applies the relevant combinators to produce the complete set of
possible explanations for the observations in a manner very
similar to NL parsing. Thus, the ELEXIR algorithm incrementally creates the set of all explanations for the observed
actions.
For example, given the original example plan lexicon and
the observations: a, b, c, d the algorithm produces [G] and
[G/{D}, D] as explanations. Note, the second explanation
is included to account for the case where the D category
will be used in some other, as yet unseen, plan. Under the
assumption that a given category can only contribute to a
single plan, if these categories are consumed at the earliest
opportunity they will be unavailable for later use.
Taking a probabilistic approach to plan recognition (Charniak and Goldman 1993) the objective is to compute the conditional probability for all of the possible root-results (Charniak and Goldman 1993). To do this ELEXIR uses weighted
model counting. Given the complete and covering set of explanations for a set of observations ELEXIR uses the following formula to compute the conditional probability of each
goal that occurs in at least one explanation of the observations:
Definition 1.7
P(expi |obs)
P(goal|obs) =
Changing Plan Anchors
With this algorithm in hand, it is important to recognize that
structural properties of the lexicon can have a significant impact on the runtime of the plan recognition algorithm. Different lexicons can result in varying numbers of resulting
explanations for the same set of observations having a profound impact on the recognition algorithm.
For example, in the preceding plan grammar c was chosen
as the anchor for goal G. However, we could have encoded
the plan in a lexicon that made different choices about plan
anchors.
a := A,
c := C,
d := (G\{A, B})\{C}.
also encodes the same causal structure for the plan for G, but
makes a different choice for the plan anchor.
(Geib 2009) and (Geib and Goldman 2001) have shown
that this and other domain encoding features can have a
significant impact on the runtime of plan recognition algorithms based on lexicalized grammars. However as we will
see the choice of anchors can also lead to a significant problem for these algorithms.
The Problem
ELEXIR’s algorithm and approach to computing probabilities works well for complete observation traces, that is observation traces where there is no possibility of further observations. However, there is a significant problem with this
approach in domains where it is known that more observations are possible. To see this, consider the following plan
grammar for robbing a bank or selling a gun to a teller. Note
that this grammar has roughly the same underlying causal
structure as our initial example grammar (ie. the first two
actions are unordered relative to the third and later actions) :
{expi |goal∈expi }
where P(expi |obs) is the conditional probability of explanation expi . That is, ELEXIR computes the conditional probability of each explanation. The conditional probability for
any particular goal is just the sum of the probability mass associated with those explanations that contain it. This relies
on computing the conditional probability for each explanation.
For an explanation, exp, of a sequence of observations,
σ1 ...σn , that results in m categories in the explanation,
ELEXIR defines the conditional probability of the explanation as:
Definition 1.8
n
m
P(ciniti |σi )
P(root(c j ))K
P(exp|{σ1 ...σn }) =
i=1
b := B,
graspBag := GB, graspGun := GG,
enterBank := EB, graspCash := GC,
threaten := ((ROBBANK/{GC})\{EB})\{GB, GG},
handOverGun := ((S ELLGUN/{GC})\{EB})\{GB, GG}
With this lexicon, suppose we observe an agent perform the
following series of observations:
j=1
Where ciniti represents the initial category assigned in this
explanation to observation σi and root(c j ) represents the
root result category of the jth category in the explanation.
The first product represents the probability of the given
observations actually having their assigned CCG categories.
This is standard in NLP parsing and assumes the presence
graspBag, graspGun, enterBank.
In this case, ELEXIR is only able to compute one explanation for these observations, namely [GB, GG, EB]. Since
none of the observation’s categories allow for their combination, the only consistent explanation is that each of these
12
actions is being done as a separate root goal. Moreover,
since neither ROBBANK or SELLGUN occur as any category’s root-result in the explanation, ELEXIR will compute
a conditional probability of zero for both of these categories.
This strongly clashes with our intuition that all three of
the observed actions could be part of a larger plan. Not only
that, we also believe that it is significantly more likely that
ROBBANK is the goal the agent is pursuing than SELLGUN
given these three actions. We anticipate that the next action
will be to threaten the teller. If we knew there were no other
observations, that is, the actor was guaranteed not to perform
any further actions, then we might be willing to accept this
explanation. However given the possibility of future actions
this explanation seems unacceptable.
This problem is a result of the use of lexicalized grammars
and design choices in the construction of the lexicon. If we
restrict ourselves to the kind of, minimal lexically justified
explanations that ELEXIR produces, then we are unable to
consider the possibility of plans for a given goal until an
action that is an anchor for a plan for this goal has been observed. In some cases, this is very advantageous since the
system it is not forced to hypothesize goals when the anchor actions for the goal has not been observed, thus saving
valuable time. However in cases where we are particularly
interested in the probability of a goal whose anchor has not
been observed, more work must be done.
prior probability for robbing the bank (which while unlikely
in itself is much more likely then the three unrelated events
happening).
This suggests leveraging our existing algorithm by hypothesizing the addition of a category with a desired rootresult to the explanation and making use of the change in the
conditional probability of the individual explanations (CP)
to as a heuristic estimate of how likely it is that the agent is
actually pursuing the desired goal. In such a system, large
positive shifts in CP indicate two things. First, there are
observed actions with categories that can play the role of
arguments to a category with the desired root, (root probability terms for these categories drop out of the conditional
probability for the explanation.) Second, the rise in probability from the loss from the categories that contribute to
the desired goal as arguments overshadows the cost associated with the introduction of the goal. Negative shifts in
CP indicate the opposite. Either there weren’t sufficient
gains from categories that contribute, or the cost of the goal
of interest was too high.
It is important to note that since the observed actions may
be able to act as arguments to a category that is itself an
argument to a category of interest the process of identifying which observations could be playing a role in the desired goal is more complex than simply extending the explanations with a hypothesized new category. Instead we will
have to compute the cancellation for the explanation given
the category. To make this more precise,
Proposed Solution
Computing the conditional probability for all possible rootresults would effectively amount to performing all of the
computations that are normally saved in ELEXIR by moving the anchors later in the plans and deferring hypothesizing higher level goals. Instead of this costly approach, this
paper advocates a heuristic metric that, when queried about
a particular root goal, measures how much of the observed
action sequence could contribute to the goal in question.
To inform this, reconsider the Bank robbing example. The
reason it seems likely that the agent is going to rob the bank
is because all three of the observed actions could be arguments to a category that has robbing the bank as its rootresult. All three of the observed actions could also be arguments to the final category in the lexicon, that has selling the
gun as its root-result. However, intuitively we dismiss selling the gun to someone in the bank as being very unlikely.
This seems to identify two features that should be critical in
our metric: 1) the number of observed actions’ categories
that can act as arguments or sub-arguments to a category
that has the desired goals as its root-result, and 2) the prior
probability of the goal of interest.
Imagine in our example, hypothesizing the addition to
the explanation of the category from the lexicon that has
ROBBANK as its root-result. The process that we have already discussed for computing explanations from observations would combine all three of the observations with the
robbing bank category to produce a reduced explanation
with ROBBANK / {GC} as its sole category. This explanation
has a much higher conditional probability than the current
one. The root probability terms for each of the three subsumed categories have been removed and replaced with the
Definition 1.9 we define a cancellation of a category, C,
against an existing explanation, exp, as a new explanation
exp’ that results from adding C to exp and removing from
exp those categories that can fulfill leftward argument roles
for C or the leftward arguments of the recursive expansion
of one of C’s arguments.
Since there can be multiple possible cancelations for each
category and explanation pair:
Definition 1.10 we define the maximal cancelation of a category C, against an existing explanation, exp, as any cancelation of C against exp that results in the largest change in
the conditional probability of the explanation given the observations.
As we have already alluded producing cancellations must
be sensitive to the possibility that categories may act as an
argument to a category that is itself an argument to a category that has the desired root-result. In more traditional
planning terminology a category may contribute to a subgoal
of a plan to achieve the goal. Therefore the process of computing maximal cancellations must consider all of the possible completions for the goal category’s arguments. Like
traditional hierarchical planning, this can require “decomposing” an argument by replacing it with a category from
the lexicon that results in the same root-result. Consider the
explanation [A, B, C] looking for a D where the plan lexicon includes categories (D\P)\A and P\{B, C}. In this case,
all of the previously observed actions could contribute to
achieving goal D however this can only be seen if atomic
category P is expanded.
13
Allowing this kind of category decomposition also requires that all possible permutations of unordered arguments be considered. Consider again the simple explanation
[A, B, C] in the context where we are looking for D but this
time the grammar includes D\{P, A} and (P\B)\A. If we first
remove the A argument to D and then consider decomposing P we get [B, C] as a cancellation, but in the other order
we can get [C] as a cancellation because the A is still in the
explanation. Depending on the prior probabilities of the respective root goals either of these explanations might be the
maximal cancelation.1 Thus computing the maximal cancellation for an explanation and a category requires that we
consider all of the possible cancellations and orderings for
the categories.
Next we define two proposed metrics based on CP :
3. compute the set of all cancelations and CPfor each explanation and category pair.
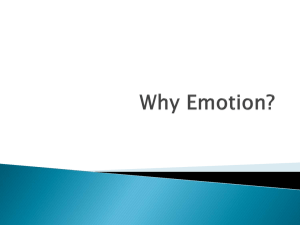
In this trace, extraneous actions were inserted at steps two
and three (for goal g2), five (for goal g3), seven (for goal
g4), and nine (for goal g5). This means, by the end of this
trace, the anchor for the primary goal (g1) has still not been
seen. Note that the maxCPand the maxCPare
never negative in this test run. The probabilities in this example were
designed so that canceling even a single action would offset
the cost of adding a category with g1 as its root result. This
accounts for the zero values for the first observation.
Since the actions observed second and third do not con
tribute to g1 there is no change in maxCPand
maxCP.
The fourth action does contribute to g1 and can be canceled
by the category added for g1 accounting to the spike in the
heuristics. Our heuristics drop at observation five because
while the observed action does not contribute to g1, the occurrence of the observation lowers the overall probability of
the explanation and thus reduces maxCPand maxCP.
The further drop in our heuristics at the sixth observation is a result of the occurrence of the anchor for the first
five-step subplan of g1. After this point, and until the next
subplan of g1 is begun at observation ten, all of the observed
categories that can contribute to g1 can be combined into a
single category by the ELEXIR algorithm. This means there
is only a single category in the most likely explanation that
can be canceled when looking for g1. This is why we again
see the metrics stay at zero.
After observation ten we see a rise and plateau in the metrics as a result of executing the actions of the second fivestep subplan for g1. In this case since there are now two
subplans that can contribute to g1 the metrics do not return to
zero. The divergence between the maxCPand maxCPat
this point are a result of an increasing number of explanations due to the length of the subplans.
These are very preliminary results and we very much view
this algorithm as a work in progress and are continuing to
evaluate its effectiveness and to look at the application of
this approach to real world domains as an area for future
work.
4. store the maxCPand maxCPfor
each category of interest.
Discussion and Limitations
Maximum CP (maxCP): For each explanation of the
observations, loop over the set of all categories that have
the desired root-result compute the CP for the maximal
cancellation for each explanation and category pair. Store
the maximum across all explanations.
Average maximum CP (maxCP):
Average
the
maxCP values computed for each explanation and
category pair for the desired root goal.
Keep in mind that both of these statistics may be negative.
Adding a category that has the particular root-result may actually make the explanations less likely. In cases where it
is necessary to distinguish the category being discussed, we
will use subscripts (i.e. maxCPC of maxCP
C)
Use of these metrics is relatively straightforward. At any
given point in the observation trace,
1. processing by the ELEXIR algorithm is halted and the
current set of explanations is collected.
2. For any category of interest, the set of all categories that
have that as their root result is collected.
The efficacy of these heuristics depends a great deal on the
application domain. To see this, we will briefly reiterate
when these heuristics will be helpful and then discuss the
kinds of domains that will benefit the most from the appeal
to such methods.
A positive maxCP is a good indicator that the observed actions could be used in service of the goal of interest. Keep in mind that this indicates that the cost of
introducing the new root goal is offset by the use of observed actions to achieve its subgoals. While a positive
maxCP suggests the observations could be used for a par
ticular goal, a positive maxCP
is a far more positive indi
cator. For the maxCP
to be positive it must be the case,
that there are more explanations for which we find a positive
maxCP than there are negative ones. As such, it gives us a
strong reason to think the agent might be pursuing the goal.
With this said it should be noted that even a negative
maxCP can indicate the presence of the goal. It is only in
In the next section we will show using these two metrics
in a synthetic domain.
Experimentation and Validation
We have implemented these ideas and Figure 3 plots
maxCPand
maxCPfor the primary goal category being
pursued in the observed sequence. This sequence was generated from a very simple test lexicon that contained five
totally ordered plans (g1, g2, g3, g4 and g5) each built as a
tree with fixed branching factor of five and depth two with
the anchors for each plan as the middle (third) action of the
subtree. This means that each plan was twenty five steps
long with the anchor for the topmost goals occurring at the
thirteenth step.
1
We are looking at overloading category cancellation as an area
for future work. This would obviate the need for considering multiple orderings in this case.
14
Average and Maximum Change in Conditional Probaiblity vs Observation
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
1
2
3
4
5
6
7
8
g1AverageMDCP
9
10
11
12
13
14
g1MDCP
Figure 3:
cases where:
heuristics before exploring the possibility of using it to compute as an upper bound on the goal’s conditional probability
P(root(C)) = −maxCP
C
Effective Use
can we conclude that none of the previously observed actions can contribute to the goal, C. In such cases, there are
no explanation and category pairs where in any of the observed actions contribute to the root goal. Thus, we have no
evidence that the agent is pursuing the goal.
While this would give us very strong reasons to suppose
that the goal is not being pursued, in general, in any domain
with ambiguity or noise we would expect this to be a very
rare occurrence. In general, we will expect that for sufficiently large plans and numbers of observations there will
be some observations that could participate in any plan.
Note that, while we have discussed this as a heuristic metric, adding an explanation’s maxCP to the conditional
probability of the explanation (given the observations) is an
upper bound on the conditional probability of the explanation if the desired goal is actually present. This is a result of
two features of the algorithm:
Given the comments in the previous section, it is worth noting that individual queries for a goal may not be particularly informative. Knowing the maxCP for a particular
goal will not give the user a feeling for how great an impact
other actions or goals might have. Since the range of possible maxCP values depends a great deal on the size of
the plans being queried after and the makeup of the observa
tions, an individual maxCP (or even maxCP)
score may
not be as informative as we would like. As we have already
seen these values vary a great deal based on when and where
in the observation trace for a particular plan the query for a
root goal is executed.
A method for using this tool in deployed systems, that we
have found effective in our exploratory studies, is to query
for a small but randomly selected set of goals that are not of
interest in addition to a particularly desired goal. If possible,
including goals that are known not to be present can also
help. Examining a diverse set of goals can give one a sense
of how unusual the heuristic values are.
1. maxCP and maxCP
calculations have not taken the
probability of some observed action being assigned the
specific category used in the cancelation.
2. Computing cancelations of the goal of interest does not
consider the possibility of any alternative explanations of
the observations based on other possibly more likely goals
who’s anchors have also not been observed.
Domains that will Benefit
In domains that have a large number of possible relatively
uninteresting root goals with a significant number of shared
subgoals, and where there are a small number of root goals
that are important to identify early, these heuristics can be
a powerful addition to the system builder’s toolkit. The
large number of root goals with shared structure makes plan
recognition methods with early commitment to root goals
computationally expensive(Geib 2009). This strongly encourages the use of approaches like ELEXIR with plan anchors as late in the plan as possible to delay commitment.
Both of these features will reduce the over all probability
mass associated with the explanations we are interested in.
As a result, we could actually use maxCP values to compute an upper bound on the likelihood of the goal. However,
given the assumptions behind computing maxCP values
and the ELEXIR algorithm in general, we have decided
to explore using maxCP and maxCP
as stand alone
15
Conclusions
However, the presence of the small set of important goals
that must be recognized as early as possible presents a problem. The anchors for these plans can be moved forward,
however the shared subgoals of the plans may make this
computationally infeasible. Using these two heuristic metrics may provide an alternative for such domains.
The effectiveness of this approach depends a great deal on
1) how computationally expensive the preprocessing is given
the grammar, 2) if early detection of root goals is desirable
(meaning there will be more plans with early anchors) and
3) if more global goal recognition is desirable, versus the
focused queries that can be asked with this method.
ELEXIR views plan recognition as probabilistic parsing of
lexicalized grammars. Deliberately designing the lexicon
for such systems to delay commitment to high level goals
(in order to reduce runtime) can create a problem for such
algorithms. In conditions where, no action that anchors a
plan for a particular goal is observed, the algorithm will assign a probability of zero to the goal.
This paper has advocated the use of two heuristic metrics,
the maximum change in conditional probability and the average maximum change in conditional probability to identify when observed actions may be contributing to a goal
whose anchor actions have not been observed. This paper
has shown initial results demonstrating the effectiveness of
this approach, and provided a discussion of when this approach will be effective.
Use by Themselves
This paper has advocated this heuristic as an additional tool
to be used after the existing ELEXIR algorithm has been
run. However, we could take a more radical approach to
plan recognition, by doing almost no initial processing by
using all rightward branching grammars and these heuristics
to identify the high likelihood goals.
In such a setup, the last action of every plan is chosen as
the anchor. This means that almost no processing is done
before the last action of a plan or subplan is seen making the
initial processing very fast (See (Geib 2009)). At any time,
the set of observations could be “bounded” and we use a
rightward grammar to sweep back through the observations
and based on maxCP determine how many of the actions
contribute to any particular goal.
We can certainly imagine domains where such a method
could be used to supplant all of plan recognition. Forensic
analysis of audit logs after a network compromise has been
detected might be one case. (ie. was a particular exploit or
vulnerability used to gain access to the machine?)
Acknowledgements
Dr. Geib’s work in this paper was supported by the EU Cognitive Systems project Xperience (EC-FP7- 270273) funded
by the European Commission.
References
Baldridge, J. 2002. Lexically Specified Derivational Control
in Combinatory Categorial Grammar. Ph.D. Dissertation,
University of Edinburgh.
Bishop, C. 2006. Pattern Recognition and Machine Learning. Springer Verlag.
Carberry, S. 1990. Plan Recognition in Natural Language
Dialogue. ACL-MIT Press Series in Natural Language Processing. MIT Press.
Charniak, E., and Goldman, R. P. 1993. A Bayesian model
of plan recognition. Artificial Intelligence 64(1):53–79.
Clark, S., and Curran, J. 2004. Parsing the wsj using ccg
and log-linear models. In ACL ’04: Proceedings of the 42th
Annual Meeting of the Association for Computational Linguistics, 104–111.
Curry, H. 1977. Foundations of Mathematical Logic. Dover
Publications Inc.
Geib, C. W., and Goldman, R. P. 2001. Recognizing plans
with loops represented in a lexicalized grammar. In Proceedings of AAAI-2011, (to appear).
Geib, C. W. 2009. Delaying commitment in probabilistic
plan recognition using combinatory categorial grammars. In
Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), 1702–1707.
Pynadath, D., and Wellman, M. 2000. Probabilistic statedependent grammars for plan recognition. In Proceedings
of the 2000 Conference on Uncertainty in Artificial Intelligence, 507–514.
Steedman, M. 2000. The Syntactic Process. MIT Press.
Vilain, M. 1991. Deduction as parsing. In Proceedings
of the Conference of the American Association of Artifical
Intelligence (1991), 464–470.
Related Work
While there is a growing body of work on viewing plan
recognition as a problem of parsing formal grammars(Carberry 1990; Vilain 1991; Pynadath and Wellman 2000), we
know of no similar work. The central objective of research
in plan recognition has been to identify, as early as possible, the plans and goals of the agent. The problem addresses
here results from the deliberate choice in the ELEXIR system to move away from this kind of early development of
hypothesis about the agent’s plans and goals.
Further, the heuristic suggested here eschews developing
theories about all possible goals and plans in favor of considering queries about the likelihood of the observed actions contributing to a specific goal. As such, this work
moves away from more traditional plan recognition algorithms in the direction of problems like partial string matching or more general pattern recognition (See (Bishop 2006)
for an overview). Such algorithms ask if a particular pattern
or string is present in the input stream rather than identifying all of the possible patterns in the input stream. As such,
the large body of work in work in classification algorithms
could also be considered related, however the use of lexicalized grammars and the application to the plan recognition
domain make this work unique.
16