A helical Cauchy-Born rule for special Cosserat rod
advertisement

A helical Cauchy-Born rule for special Cosserat rod
modeling of nano and continuum rods
1
Ajeet Kumar, 2 Siddhant Kumar and 1 Prakhar Gupta
Department of Applied Mechanics, IIT Delhi, Hauz Khas, New Delhi, India, 110016
2
Department of Mechanical Engineering, IIT Delhi, Hauz Khas, New Delhi, India, 110016
Correspondence: ajeetk@am.iitd.ac.in
1
Abstract. We present a novel scheme to derive nonlinearly elastic constitutive laws for special
Cosserat rod modeling of nano and continuum rods. We first construct a 6-parameter (corresponding to the six strains in the theory of special Cosserat rods) family of helical rod configurations
subjected to uniform strain along their arc-length. The uniformity in strain then enables us to
deduce the constitutive laws by just solving the warping of the helical rod’s cross-section (smallest
repeating cell for nanorods) but under certain constraints. The constraints are shown to be critical
in the absence of which, the 6-parameter family reduces to a well known 2-parameter family of
uniform helical equilibria. An explicit formula for the 6-parameter helical map is derived which
maps atoms in the repeating cell of a nanorod to their images for the purpose of repeating cell
energy minimization. A scheme for the passage from nano to continuum scale is also presented
to derive the constitutive laws of a continuum rod via atomistic calculations of nanorods. The
bending, twisting, stretching and shearing stiffnesses of diamond nanorods and carbon nanotubes
are computed to demonstrate our theory. We show that our scheme is more general and accurate
than existing schemes allowing us to deduce the shearing stiffness and several coupling stiffnesses
of a nanorod for the first time.
Keywords: Cauchy-Born rule, special Cosserat rod, elastic constitutive modeling, helical symmetry, molecular simulation.
Mathematics subject classification: 74B20, 74A25, 74Q15.
1
Introduction
Interest in rod theory has surged during the last few decades, due in large part to its applicability
in biophysics, e.g., modeling of biological filaments such as DNA (Manning et al., 1996; Wang et al.,
1997), collagen fibrils (Bozec et al., 2007), plant tendrils (Goriely and Tabor, 1998) etc. Recently,
rod theory has also been employed for modeling cables (Goyal et al., 2005), curly hairs (Miller et
al., 2014), carbon nanotubes and nanowires (Gould and Burton, 2006; Chandraseker et al., 2009;
Kumar et al., 2011; Fang et al., 2013). The knowledge of accurate nonlinear constitutive laws is
the key to modeling such long and slender elastic bodies. The classical formulae for bending (EI),
twisting (GJ) and extensional (EA) stiffnesses of a rod are well known, but they do not hold in the
materially nonlinear regime. Besides, these formulas do not hold for nanotubes and nanorods even in
the materially linear regime due to nanoscale effects. Here ‘E’ and ‘G’ denote the Young’s modulus
and the shear modulus of elasticity respectively, whereas ‘A’, ‘I’ and ‘J’ have the usual meanings
of cross-sectional area, second area moment and polar moment of area, respectively. The classical
1
formula for the shearing stiffness (κGA) is a bit involved due to the shear correction factor (κ)
which depends on a cross-section’s shape too (Timoshenko, 1940; Cowper, 1966; Hutchinson, 2001).
There appears to be no work to derive this correction factor for nanorods. Chiral rods (Moroz and
Nelson, 1997; Upamanyu et al., 2008) have intrinsic twist in their stress-free reference configuration.
They exhibit interesting coupling behavior, e.g., coupling between stretch and twist (Chandraseker
and Mukherjee, 2006; Upamanyu et al., 2008), shear and bending (Healey, 2002), radial stretch and
twist (Kumar and Mukherjee, 2011) etc. However, the formulas for these coupling stiffnesses have
not been derived yet. Simo and Vu-Quoc (1991) derived expressions for all the relevant stiffnesses of
their rod model by substituting the constrained kinematics of their model in the three-dimensional
linear and isotropic constitutive laws. However, such a method does not yield correct expressions
of stiffnesses due to the assumed in-plane rigidity of a cross-section.
There have been several works on deducing the constitutive laws of bulk crystalline materials
from the inter-atomic energy of the relevant unit cell. These methods are primarily based on the
Cauchy-Born (CB) rule (Ericksen, 2008). The key here is the presence of translational periodicity
in a uniformly deformed bulk crystal which reduces computation on the entire crystal to just the
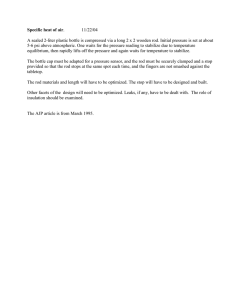
atoms of its unit cell. However, this periodicity is not retained when a nanorod is strained uniformly along its arc-length, e.g., a uniformly twisted or uniformly bent configuration of a nanorod
possesses no translational periodicity (see Fig.1). This loss of translational periodicity also occurs
in case of “uniformly deformed” two-dimensional sheets which motivated Arroyo and Belytschko
(2002) to propose the exponential Cauchy-Born rule. The same issue arises in case of thin films
with “N” layers of atoms where the in-plane and bending strains need to obey certain compatibility
conditions in order to be integrable (Friesecke and James, 2000; Schmidt, 2008). We shall see that
the configurations of a special Cosserat rod (Antman, 1995), when strained uniformly along its arclength, form a 6-parameter family of rod configurations possessing helical symmetry. The number 6
here corresponds to the strain measures in this theory (2 shears, 1 axial strain, 2 bending curvatures
and 1 twist) which reduces to 3 in case of Kirchoff rods (Love, 2000). Yang and Weinan (2006)
proposed a generalized Cauchy-Born rule for rods. However, it has a major drawback: the method
at most allows a circular cross-section, for example, to turn into a planar ellipse. James (2006)
proposed a theory of objective structures in which he uses objective boundary conditions to study
deformations of a nanorod based on a 2-parameter helical symmetry (e.g., coupled extension-twist,
pure bending). Subsequently, Cai et al. (2008) proposed an alternate formulation based on periodic
boundary conditions to simulate the 2-parameter helical deformations of James (2006). Hakobyan
et al. (2012) proposed an objective Cauchy-Born rule to study planar deformations of nanorods
subjected to coupled bending and stretching. However, shearing is not allowed in their formulation.
The case of non-planar deformations is even more involved requiring simultaneous bending, twisting,
stretching and shearing. Palanthandalam-Madpusi and Goyal (2011) proposed an inverse technique
in which they presumed the functional form of the constitutive laws to be a truncated Fourier series
and fitted the unknown parameters in the truncated series using equilibrium solutions of nanorods.
In addition to the limitation of using truncated Fourier series, their approach also requires atomic
equilibrium solutions of the full-length nanorod which is prohibitively expensive. Thus, no accurate
and efficient method exists to deduce full nonlinear constitutive laws of nano and continuum rods
modeled as a special Cosserat rod. In this paper, we present a helical Cauchy-Born rule (HCB rule)
to achieve this objective.
The paper is organized as follows. We begin with a brief description of the theory of special
Cosserat rods in Section 2. In Section 3, we derive an analytical formula for the deformation map
2
Figure 1: Loss of translational periodicity in a uniformly twisted nanorod.
of a continuum rod strained uniformly along its arc-length and show that such rods form a family
of 6-parameter helical configurations. We further show that to let the cross-sections warp in these
configurations and also preserve the uniform strain imposed in the helical rod, warping must be
allowed but under certain constraints (see (20)). In Section 4, we then hypothesize that the discrete
analogues of the continuum formulas and the constraint equations derived in Section 3 hold for
nanorods which gives us the desired discrete map (27) and the discrete constraint equations (28)
for generating the 6-parameter family of a nanorod. We call these discrete analogues ((27) and
(28)) the helical Cauchy-Born rule. The expressions for forces and moments that act in a nanorod
as well as its various stiffnesses are then derived in terms of the relaxed positions of atoms in its
repeating cell and the inter-atomic potential used. In Section 5, we compare our methodology with
the theory of Objective structures and also discuss an example of coupled bending-stretching deformation in a nanorod to illustrate the role of constraints. In Section 6, a scaling law is presented to
derive constitutive laws of a continuum rod through a series of atomistic calculations on nanorods
of increasing radii. In Section 7, we then apply the HCB rule to compute various stiffnesses of a
diamond nanowire. Interesting effects of surface relaxation on a nanorod’s constitutive response
are also observed in atomistic calculations based on the HCB rule. These effects are independently
verified using linear elasticity theory augmented with surface stress effects. In Section 8, we finally compare our methodology with existing techniques for deriving stiffnesses of both nano and
continuum rods and establish that our method is more general and accurate. To verify that the
stiffnesses obtained using our scheme are indeed accurate, we study the onset of Euler buckling
in a (10,10) single-walled carbon nanotube. We see that the critical buckling load obtained from
FEM simulation of the nanotube matches accurately with fully atomistic results when full nonlinear
constitutive laws are input to the FEM model. Section 9 concludes our paper and proposes several
directions for further research.
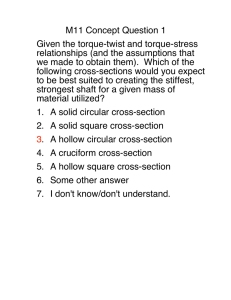
Notation: The set of unit vectors {e1 , e2 , e3 } represent a fixed, right-handed, orthonormal basis for R3 , X ≡ (X1 , X2 , s) denotes the position of a typical material point of a rod in its stress-free
reference configuration whereas x denotes the same material point in deformed configuration. Here,
(X1 , X2 ) denote the cross-sectional coordinates and “s” denotes the undeformed arc-length coordinate (see Fig.2). Repeated Latin indices always sum from 1 to 3 whereas repeated Greek indices
3
d1(s)
d3(s)
d2(s)
DEFORMED
r(s)
X1
X2
e1
_
X3_ s
e3
e2
UNDEFORMED (REFERENCE)
Ω
Figure 2: A typical rod deforming from its straight state reference configuration.
sum from 1 to 2. Finally, the differentiation of a field variable with respect to the undeformed
d
≡ (·)′ .
arc-length is denoted by a superscripted prime, i.e., ds
2
Brief description of a special Cosserat rod
Fig.2 shows a typical rod deforming from its straight state reference configuration. The kinematic
variable r (·) in the figure denotes the centreline of a rod. We also have two directors (d1 (·), d2 (·))
which are images of two orthonormal lines (e1 , e2 ) in the undeformed cross-section of a rod (typically
material lines along the two principal axes). The third director d3 (·) is assumed to be perpendicular
to the other two. The directors rigidly rotate in this theory (Antman, 1995) and model rotation of
a rod’s cross-section, i.e., di (s) = R(s)ei where R(·) denotes a three-dimensional rotation tensor.
The field quantities (r(·), R(·)) being the kinematic variables, their frame-indifferent derivatives
(RT r′ , RT R′ ) define strains in this theory. Let us define
T
v = ν1 ν2 ν3 ,
T
k ≡ axial(K) = κ1 κ2 κ3 .
r′ = Rv,
R′ = RK,
(1)
Here, the components of v are defined with respect to the global basis {e1 , e2 , e3 } which also equal
the components of r′ in the local frame of directors. The first two components of v represent shear
while the third component represents axial stretch. Similarly, k is defined as the axial vector of the
skew symmetric matrix K. The first two components of k represent the two components of local
bending curvature while the third component represents twist. We then let n(·) and m(·) denote
the internal contact force and the internal moment respectively that act on a typical cross-section
of a rod and write
n = ni di , m = mi di .
(2)
Here n1 , n2 are the shear forces, n3 is the axial force, m1 , m2 are the bending moments, and m3 is the
T
T
torque or twisting moment. Let us define the triples n = n1 n2 n3 , and m= m1 m2 m3 .
Upon force and moment balance of an arbitrary segment of a rod, one can derive the following
4
differential equations for static equilibrium of a rod:
n′ + ñ = 0 and m′ + r′ × n + m̃ = 0.
(3)
Here ñ and m̃ are the distributed load and the distributed couple respectively that act on a rod. For
a hyperelastic rod, we assume the existence of a twice-differentiable, scalar-valued function Φ(v, k)
which is strain energy per unit undeformed length in this theory. Using the energy minimizing
principle and tools from calculus of variations, one can also derive the relevant Euler-Lagrange
equations of a rod which, when compared with (3), lead to
n=
∂Φ
∂v
and m =
∂Φ
.
∂k
The equations in (3) can then be written in the local frame of directors as
′
′
∂Φ
∂Φ
∂Φ
∂Φ
∂Φ
+ ñ = 0 and
+v×
+ m̃ = 0.
+k×
+k×
∂v
∂v
∂k
∂k
∂v
(4)
(5)
Based on the symmetry group relevant to circular rods, Healey (2002) classified them into transversely hemitropic and transversely isotropic rods. The relevant symmetry group for hemitropic
rods is defined as follows:
n
o
Q ≡ Qθ : Φ(Qθ v, Qθ k) = Φ(v, k), ∀ 0 ≤ θ < 2π, Qθ ∈ SO(3), Qθ e3 = e3 .
(6)
This group can make a distinction between left and right handed helical patterns in a rod and is
useful in modeling intrinsically twisted rods, e.g., chiral nanotubes, DNA, collagen fibrils etc. The
symmetry group for transversely isotropic rods, on the other hand, also contains improper rotations
in (6). Using the symmetry group of hemitropic rods (6) and certain “flip-symmetry” that models
homogeneity in a rod along its arc-length, Healey (2002) derived a quadratic form of the strain
energy per unit undeformed length as shown below.
i
1h
2
2
(7)
Φ(·) = Aκα κα + Bκ3 + Cνα να + D(ν3 − 1) + 2E(ν3 − 1)κ3 + 2F να κα .
2
Here, the coefficients A, B, C and D are the bending, twisting, shearing and extensional stiffnesses
respectively. The coefficient E denotes the coupling stiffness between axial strain and twist while
F denotes coupling between bending and shear. Both the coupling coefficients vanish in case of
transversely isotropic rods. Even for materially linear behavior, one needs to know the six coefficients
in (7). Deducing materially nonlinear behavior is even more difficult. One possibility would be to
deduce Φ(·) from the three-dimensional elastic strain energy density W (·) by integrating the latter
in the plane of the undeformed cross-section (Ω0 ), i.e.,
Z
Φ(v, k) =
W (F(v, k)) dX1 dX2 .
(8)
Ω0
Here F() denotes the deformation gradient. Antman (1995) proposed several mathematical forms
for the three-dimensional deformation map of a rod in terms of its kinematic variables. One of the
most widely used form is
x(X) = r(s) + Xα R(s)eα .
(9)
5
Using (9), the deformation gradient can be written as
F = [r′ + Xα R′ eα ] ⊗ e3 + Reα ⊗ eα = R [v ⊗ e3 + Xα Keα ⊗ e3 + eα ⊗ eα ] ,
(10)
which could then be substituted in (8) to deduce Φ(·). However, the deformation map (9) restricts
a typical cross-section of a rod to be rigid. In reality, a typical cross-section of a continuum or nano
rod does not remain rigid when strained. Forcing this rigidity leads to higher Φ(·) and incorrect
stiffnesses. We make a note, however, that the deformation map (9) has been used widely by
several researchers to illustrate the connection between the theory of special Cosserat rods and the
three-dimensional elasticity theory. The special theory of Cosserat rods does allow warping of a
cross-section but warping is assumed to depend completely on the local value of the strain (v, k).
Accordingly, no independent kinematic variable is needed to model warping. In the general theory
of Cosserat rods (Antman, 1995; Kumar and Mukherjee, 2011), the two cross-sectional directors
can also become non-orthogonal which allows a restricted form of in-plane warping (anisotropic
expansion and in-plane shearing) to be independent from other deformation modes but out-ofplane warping is still assumed to be dependent on all the other independent modes of deformation.
Simo and Vu-Quoc (1991) introduced an additional kinematic variable in the theory of special
Cosserat rods to let out-of-plane warping (due to twist only) be an independent deformation mode
but in-plane warping is not allowed there. We show in the next section that accurate estimates of
stiffnesses for the special Cosserat rod theory can be obtained by allowing a typical cross-section to
warp in the most general way (both in-plane and out-of-plane), but under certain constraints.
3
Configuration of a rod strained uniformly along its arclength
We now derive an expression for the configuration of a rod subjected to uniform strain (v, k) along
its arc-length in which the warping of the cross-section is also allowed. The cross-sectional strain
energy of such a configuration can then unambiguously be defined to be Φ(v, k). Assume the angle
⊥
between v and k to be φ (see Fig.3(a)). Furthermore, let k̂ and k̂ denote the unit-normed tuples
parallel and perpendicular to k respectively, which lie in the plane formed by v and k. We then
decompose v as
⊥
v = |v|cos(φ)k̂ + |v|sin(φ)k̂ .
(11)
Upon substituting (11) in the definition of strain measures (1) and integrating, one can derive the
following analytical expressions for the configuration variables (r(·), R(·)):
Z s
⊥
lK
r(s) = r0 + |v|R0 cos(φ)sk̂ + sin(φ)
e dl k̂ ,
0
sK
R(s) = R0 e .
(12)
Here, r0 and R0 denote the centerline position and the rotation respectively of a cross-section
which was originally at s=0. Without affecting energy, one can rigidly translate and rotate the
whole deformed rod such that the “s=0” cross-section has its center at the origin and is oriented
6
(a)
(b)
Figure 3: (a) A uniformly strained continuum rod (shown in pink-blue shades) whose centerline
. (b) A nanorod
forms a helix and lies on a cylinder (shown in light green) of radius rhelix = |v|sin(φ)
|k|
with its repeating cells forming a helical configuration.
in the e1 − e2 plane. Further, substituting Rodrigues’ formula (47) for the rotation matrix elK in
(12), we obtain
⊥
1
sK
r(s) = |v| cos(φ)sk̂ + sin(φ)
I−e
k̂ × k̂ ,
|k|
(13)
R(s) = esK .
Let us define the following quantities:
τ = |v|cos(φ),
θ = |k|,
Rsθ = esK ,
⊥
|v|sin(φ)
k̂ × k̂ .
xf =
|k|
Substituting (14) into (13), the equation of the centerline then becomes
r(s) = sτ k̂ + I − Rsθ xf .
(14)
(15)
Equation (15) represents a helix whose axis passes through xf (also called a fixed point) and is
. Similarly, the pitch
directed along k̂ (see Fig.3(a)). The radius of the helix (rhelix ) equals |v|sin(φ)
|k|
of the helix equals 2πτ
= 2π|v|cos(φ)
. Thus, the parameters of this helix (fixed point, axis, radius and
|k|
|k|
pitch) get set by the prescribed uniform strain field in the deformed rod.
7
To allow a typical cross-section to also relax, let x0 (X1 , X2 ) denote the unknown relaxed shape
of the “s=0” cross-section. The deformation map for the whole rod can then be written as
x(X1 , X2 , s) = r(s) + Rsθ x0 (X1 , X2 )
= xf + Rsθ (x0 (X1 , X2 ) − xf ) + sτ k̂ (using (15)).
(16)
From (16), we note that the deformed position of any cross-section (originally at axial location ‘s’)
can be obtained in terms of the cross-section at s=0 by first rotating the latter about the fixed
point (xf ) of the helix by Rsθ and then translating the rotated cross-section by sτ k̂. Let us write
x0 (X1 , X2 ) = Xα eα + u0 (X1 , X2 ) where u0 (·) denotes the displacement of material points from their
undeformed reference position. For sake of brevity, we will now denote the relaxed position and the
displacement of the cross-section at s=0 by just x() and u() respectively. In order to solve for the
unknown relaxed position, the total strain energy of a rod’s cross-section must be minimized, i.e.,
Z
min
W Frod (v, k, x(); X1 , X2 , 0) dX1 dX2 .
(17)
x()
Ω0
Here Frod () denotes the deformation gradient of the map (16) and equals
∂x
⊗ eα
Frod (v, k, x(); X1 , X2 , s) = Rsθ K(x − xf ) + τ k̂ ⊗ e3 +
∂Xα
∂u
= Rsθ
(v + k × Xα eα ) ⊗ e3 + eα ⊗ eα + (k × u) ⊗ e3 +
⊗ eα .
∂Xα
(18)
Note that if x() minimizes (17) for r() and R() given by (13) then the map given by
r(), R(), x() → xf + Rlθ (r() − xf ) + tk, Rlθ R(), xf + Rlθ (x() − xf ) + tk)
(19)
generates a two-parameter family of energetically equivalent configurations which also minimize
(17) for any pair of (l, t).
It may be noted that (17) alone would only generate a two-parameter family of energeticallydistinct configurations for the helical parameters (τ, θ) (Ericksen, 1977; Chouaieb and Maddocks,
2004). To see this, note that (17) nowhere dictates the minimizing x() to be such that its center is
rhelix distance away from the helical axis. However, rhelix must not change since it is fixed through
the imposed uniform strain field (see (14)). Similarly, preserving the orientation of a relaxed crosssection is necessary so that the imposed curvature and twist values are not affected. In essence, the
minimizing x() must not violate (13) at s=0. Thus, the center of the relaxed cross-section must
remain at the origin and its principal axes must be aligned along the global co-ordinate axes. For
the theory proposed here, we take the center of a cross-section to mean its mass center. The other
option could be the geometric center of a cross-section but the dynamical terms in the equations of
a rod are simpler about the mass center. Similarly, by principal axes of a cross-section, we mean
the principal axes of the moment of inertia tensor. The six algebraic equations enforcing these
constraints are as follows:
R
ρ (X1 , X2 ) x(X1 , X2 ) dX1 dX2 = 0 (mass center at the origin),
Ω0 0
x2 ()x3 ()
R
ρ (X1 , X2 ) M dX1 dX2 = 0 (mixed moments of inertia vanish), M = x3 ()x1 () . (20)
Ω0 0
x1 ()x2 ()
8
Here, ρ0 () denotes density of the body in its undeformed configuration. The first two components
′ of the unknown relaxed position vector of the cross-section x(X1 , X2 ) = x1 () x2 () x3 ()
allow
in-plane warping whereas the third component allows out-of-plane warping. The six constraint
equations in (20) remove the 2-parameter energetically-equivalent solutions (see (19)) of the minimization problem (17), making it well posed. In addition, they generate a 4-parameter family of
energetically-distinct solutions for every pair of (τ, θ).
To solve the above constrained minimization problem, we define a constrained cross-sectional
energy functional as follows:
Z h
i
(21)
W (Frod ) + ρ0 (λ · x + δ · M) dX1 dX2 .
G x(), λ, δ =
Ω0
Here λ and δ are the Lagrange multiplier vectors which enforce the constraints in (20). The first
variation of (21) gives us the following Euler-Lagrange equations:
∇α · S − Se3 × k = ρ0 (λ + δx) in Ω0 ,
Sm = 0 in ∂Ω0 (traction-free boundary condition).
(22)
Here S = ∂W
denotes the 1st Piola-Kirchoff stress tensor, ‘m’ denotes the outward normal to
∂F
the boundary of a cross-section,
(∇α ·) denotes divergence in the plane of a cross-section and the
0 δ3 δ2
symbol δ = δ3 0 δ1 is a matrix formed by the three components of δ. Equation (22) must
δ2 δ1 0
be supplemented with the constraint equations (20) in order to obtain the warped cross-section
x() and the Lagrange multipliers λ and δ. The right hand side of (22)(a) can be termed the
constrained body force per unit undeformed volume, which is required to maintain the helical rod
in static equilibrium. In the absence of the constraint equations (20), the constrained body force also
vanishes and (22) then only generates a two-parameter family of energetically distinct equilibrium
configurations.
The strain energy per unit undeformed length can now be written as
Z
W Frod v, k, x̂(X1 , X2 ; v, k); X1 , X2 , 0
dX1 dX2 .
(23)
Φ(v, k) =
Ω0
Here, the dependence of the relaxed cross-section x̂() on the imposed strain (v, k) has been made
explicit.
3.1
Cauchy-Born rule for bulk crystals
The expression (23) to deduce Φ() requires knowledge of the three-dimensional elastic strain energy
density W (). However, this itself could be an unknown. The standard Cauchy-Born rule (Ericksen,
2008) can be used to deduce W () using atomic level calculations. According to this, the lattice
vectors of a three-dimensional crystal, subjected to uniform deformation gradient field F, transform
as
ai = FAi , i = 1, 2, 3.
(24)
9
Here ai and Ai are the deformed and undeformed lattice vectors respectively. Due to periodicity in
the undeformed crystal lattice and the linearity of the map (24), the deformed lattice also retains
periodicity. The positions of the atoms in the deformed crystal are then given by
x(n1 ,n2 ,n3 ),j = xj + nk ak = xj + nk FAk .
(25)
Here {xj }m
j=1 denote deformed position vectors of the atoms within the unit cell and x(n1 ,n2 ,n3 ),j
denotes (n1 , n2 , n3 )-image of the atom xj . The unknown positions {xj }m
j=1 are obtained by minimizing the unit cell energy with respect to xj while keeping the lattice vectors fixed and enforcing
periodicity as in (25). The three-dimensional elastic strain energy density of the crystal is then
defined as follows:
1
1
W (F) =
min E(x1 , · · · , xm ; F) − Eref =
E(x̂1 (F), · · · , x̂m (F); F) − Eref . (26)
V0 (x1 ,··· ,xm )
V0
Here V0 = (A1 × A2 ) · A3 denotes undeformed volume of the unit cell, E() denotes inter-atomic
energy of the deformed unit cell, Eref denotes the same for undeformed unit cell and x̂j (F) denotes
position of the j th atom obtained after minimizing the unit cell energy.
It does not seem appropriate to view one-dimensional nano-structures (e.g., long nanotubes and
nanowires) as three-dimensional elastic bodies. Hence, deducing their Φ() through (23) would be
incorrect. In the next section, we propose an independent methodology for such nanorods and
nanotubes.
4
Nanorods uniformly strained along their arc-length
Having derived the formula (16) for uniformly strained continuum rods, we hypothesize that the
discrete version of the same formula holds for uniformly strained nanorods and nanotubes. A
straight crystalline nanorod, for example, will be periodic along its length. Let us assume its
smallest period to be L0 . Then, the atoms within this periodic length will form the nanorod’s
repeating cell. We call this repeating cell the fundamental domain (FD) from now on (as in James
(2006)). A discrete variant of the map (16) can then be thought to act on the atoms in the
th
fundamental domain ({xj }m
image as shown below (also see Fig.3(b)).
j=1 ) to generate their i
xi,j = RiθL0 xj + iτ L0 k̂ + (I − RiθL0 )xf .
(27)
In order to obtain the unknown atomic positions {xj }m
j=1 in the fundamental domain, we would
need to minimize inter-atomic energy of the fundamental domain (EF D ) but under constraints (as
discussed in Section (3)) which are
m
m
xj,2 xj,3
X
X
mj xj = 0 and M ≡
mj xj,3 xj,1 = 0.
(28)
j=1
j=1
xj,1 xj,2
Here ‘mj ’ is mass of the j th atom. We call the map (27) along with (28) the helical Cauchy-Born
rule. For constrained minimization, we then define the constrained fundamental domain energy as
follows:
X
mj xj + δ · M.
(29)
Econs (v, k; {xj } , λ, δ) = EF D (τ (v, k), θ(v, k); {xj }) + λ ·
10
In order to obtain the strain energy per unit undeformed length, we then minimize (29) with
respect to the atomic positions and the Lagrange multipliers. This yields the following set of 3m + 6
nonlinear algebraic equations:
∂EF D
∂Econs
=
+ mi (λ + δxi ) = 0,
∂xi
∂xi
X
∂Econs
=
mj xj = 0,
∂λ
∂Econs
= M = 0.
∂δ
(30)
The first term in (30)(a) denotes the force on atom ‘i’ due to all other atoms in a nanorod while
the remaining terms denote “non-physical” forces due to constraints. Finally,
1
(31)
Φ(v, k) =
EF D (τ (v, k), θ(v, k); {x̂j (v, k)}) − Eref .
L0
Here Eref denotes the relaxed inter-atomic energy of the fundamental domain in its undeformed
reference state. The procedure to compute EF D and its derivatives with respect to the atomic
positions and strains are described in Appendices A and B.
4.1
Expressions for forces, moments and the elasticity tensor
The presence of constraints in the formulation complicates derivation of the expressions for forces,
moments and the elasticity tensor. In this section, we will obtain their simplified expressions by
getting rid of the constraint terms through a projection. The first derive of (31) with respect to
strain gives us the expressions for forces and moments , i.e.,
!
∂EF D ∂ x̂j
1 ∂EF D ∂Φ
+
·
(using (31))
=
∂[v, k]
L0 ∂[v, k] {xj }
∂xj (v,k)
∂[v, k]
1 ∂EF D =
.
(32)
L0 ∂[v, k] {x̂j }
We prove in Appendix C that the second term in (32)(a) vanishes. We then obtain the expression
for the elasticity tensor by differentiating (32) with respect to strains in the following way.
2
!
2
2
∂ EF D
∂ x̂i
1 ∂ EF D ∂ Φ
+
·
=
2
2
∂[v, k]
L0 ∂[v, k] {x̂j }
∂[v, k]∂xi
∂[v, k]
!
2
−1
2
1 ∂ 2 EF D ∂
E
∂
E
FD
FD
=
− Q2T
· Q2T Kij + δij δ Q2
. (33)
Q2T
2
L0 ∂[v, k] {x̂j }
∂[v, k]∂xi
∂xj ∂[v, k]
∂ 2 EF D
whereas Q2 is a projection matrix (defined in Appendix C) which
∂xi ∂xj
is used to get rid of the constraint terms. The second term in (33) is the effect of relaxation of
atoms on the elasticity tensor.
Here, the matrix Kij =
11
5
Relation with the theory of Objective structures and the
role of constraints
Going by the definition of “Objective structures” in James (2006), the 6-parameter family of helical
nanorods can be called objective molecular structures (OMS). Indeed, the corresponding atoms in
each molecule (FD or its images) of a nanorod see precisely the same environment up to a rotation
and translation (see (27) and Fig.3). This definition of “objective structures” is purely kinematic.
A family of 2-parameter helical configurations emerges once the equilibrium of every atom in the
structure is enforced. On the other hand, in case of 6-parameter helical configurations (which do
not intersect with the 2-parameter case), individual atoms do not remain in equilibrium. In fact,
additional constraint forces (see (30)(a) and (22)) are needed to maintain such uniformly strained
configurations. Let us understand how such a state of strain can be attained locally in an actual
rod which is in static equilibrium (without the constraint forces).
In uniform equilibrium configurations of a rod (without the distributed load and couple), the first
term in both the equations of (5) vanishes due to uniformity and solving the rod equations then leads
to the 2-parameter helical equilibria (Chouaieb and Maddocks, 2004). However, if the strain (v, k)
at an arc-length coordinate, say “s0 ”, of the rod do not correspond to any strain in the 2-parameter
family of helical configurations, the rod then varies its strain field in the neighborhood of “s0 ” so
that the first term in (5) becomes non-zero to enforce local equilibrium. When a uniformly strained
rod is generated with the same strain (v, k) using our methodology, the equilibrium equations in (5)
imply that the constraint body force generates a distributed load and couple which exactly match
the first term in (5) (evaluated at “s0 ”) of the non-uniformly strained equilibrium rod. We thus see
that the constraint forces in our formulation actually mimic the non-uniformity of strain field in an
actual equilibrium rod. We now present an example of uniform bending-stretching of a nanorod to
illustrate the role of constraints.
5.1
Uniform bending-stretching of a nanorod
T
T
In this case, we have v = 0 0 ν3 and k = κ1 0 0 . Thus, the helix degenerates into a
circle whose parameters are τ = 0, θ = κ1 , xf = − κν31 e2 and rhelix = κν31 (see Fig.4). Under 2parameter family of helical equilibria, only pure bending of a nanorod can be realized. Thus, only
θ is prescribed but there is no way to impose ν3 too. Even here, the helical nanorod degenerates
into a circle but the radius of the circle almost equals κ11 . Furthermore, to maintain equilibrium
of every individual atom, the nanorod cannot sustain any internal force in it. Let us see how the
constraints in our formulation do the trick of fixing the radius to be κν31 and also generate internal
force in the nanorod.
In case the FD has reflection symmetry about the (e1 − e2 ) and (e2 − e3 ) plane, the FD will
have no tendency to rotate when the nanorod is bent about e1 axis (see Fig.4). Hence, the three
constraints employed to preserve the orientation of the FD do not get “active”. Two of the remaining
constraints that fix the mass center of the FD to be at the origin do the job of selecting just one
solution from the 2-parameter energetically equivalent solutions depicted by (19). Hence, they do
not affect the energy of the FD but remove non-uniqueness from the minimization problem. The
constraint which fixes the e2 co-ordinate of the mass center is the only non-zero Lagrange multiplier
in this case which also fixes the radius of the circle to be κν31 . Upon constrained relaxation, the
12
Figure 4: A portion of a nanorod uniformly bent (κ1 ) and stretched (ν3 ). The fundamental domain
of relaxed axial length L0 is shown in green.
equation (30)a implies that the net force on the j th atom in the FD, due to all other atoms in the
nanorod, is mj λ2 e2 . Accordingly, the net force on the FD is Mλ2 e2 where “M” is the total mass of
the FD (shown as the blue vector R in Fig.4). As shown in Fig.4, this net force can be generated
only through the resultant of the force F that acts on the FD from the left and right portions of
the nanorod. This force F is actually the internal axial force generated in a nanorod due to its
stretching.
Hakobyan et al. (2012) also proposed a scheme to simulate non-uniform bending in a nanorod
due to terminal load. They generate “local objective structures” corresponding to uniform bendingstretching deformations by fixing both radius (rhelix ) and θ during relaxation but without introducing any constraint explicitly. However, the formula used by them (see eq.(9) in Hakobyan et al.
(2012)) to generate a locally uniform bent-stretched configuration couples every atom in the FD to
every other atom of the FD (even if they lie outside the radius of influence of the relevant interatomic potential). This generates a “non-physical” force on every j th atom of the FD (see equation
(A13) in their paper) which equals the sum of the forces on the FD from the left and right portions
of the nanorod multiplied by mj /M. This is nothing but our constraint force mj λ2 e2 . Thus, our
formulation reduces to theirs in the special case of uniform bending-stretching deformation of a
nanorod.
We clearly see the role of constraints in fixing strains in the 6-parameter uniform helical configurations. Although not all constraints get active for a particular strain, the formulation is general
and automatically activates the necessary constraints.
13
6
Passage from nano to continuum scale
Having discussed the methodology at both continuum and nano scales, we now discuss the passage
from nano to continuum scale. Friesecke and James (2000) proposed a similar scheme in the context
of thin films and gave a brief idea of its extension to nanotubes. The idea here is to deduce the
constitutive laws of a continuum rod (having cross-section Ω0 ) through a series of computations on
nanorods of increasing cross-sectional dimension (denoted by λΩ0 ) but subjected to uniform strain
(vλ , kλ ). Taking a cue from the scaling law of elasticity, i.e., if x(X) is a elasticity solution for a
body D then xλ (X) = λx( λ1 X) is also a elasticity solution for a scaled body (λD), it is easy to show
that the solutions obtained from solving (17) under the constraints (20) also possess this scaling
property. If we set
1
k,
λ
xλ (X1 , X2 , 0) = λx(X1 /λ, X2 /λ, 0),
(34)
then one can show (using (23)) that Φ v, k = λ12 Φλ vλ , kλ . Accordingly, forces and moments scale
as follows:
∂Φ
∂Φ
1 ∂Φλ
1 ∂Φλ
,
.
(35)
= 2
= 3
∂v
λ ∂vλ
∂k
λ ∂kλ
Similarly, the stiffnesses scale according to
vλ = v,
1 ∂ 2 Φλ
∂2Φ
,
=
∂v2
λ2 ∂v2λ
kλ =
∂2Φ
1 ∂ 2 Φλ
,
= 3
∂v∂k
λ ∂vλ ∂kλ
∂2Φ
1 ∂ 2 Φλ
=
.
λ4 ∂k2λ
∂k2
(36)
It may be noted that the solutions of nanorods at a given λ do not exactly follow the scaling law
due to various nanoscale effects. Miller and Shenoy (2000), in fact, proposed an analytical model
to include the effect of surface stress on bending and stretching stiffnesses of square nanorods.
However, with increase in λ, the effect of surface stress and other nanoscale effects diminish and
the scaled solutions then converge to the desired continuum solution.
7
Deducing constitutive laws of a diamond wire
We now use the theory proposed in preceding sections to deduce the constitutive laws of a continuum
diamond wire through a series of simulations on nanowires of increasing radii. The nanowire is
carved out from a bulk diamond crystal with the wire’s axis aligned along the [1 0 0] direction. The
Tersoff potential (Tersoff, 1988) is used to model interaction between carbon atoms. The relaxed
lattice constant for diamond is obtained by applying periodic boundary conditions to a unit cell
of the diamond crystal and letting the length of the unit cell relax until it becomes stress free.
Similarly, the relaxed material constants of the crystal are extracted from the matrix of second
derivative of the unit cell energy with respect to the deformation gradient (Tadmor et al., 1999).
These constants are tabulated in Table 1 which match closely with the available literature data
(Yoshikawa et al., 1993; Klein and Cardinale, 1993). We note that the shear modulus does not
E
) exhibiting cubic symmetry of the crystal. Fig.5 shows
follow the isotropy relation (G = 2(1+ν)
a typical fundamental domain of the nanowire that we use in our calculations. The fundamental
domain spans one unit cell of the crystal along the nanowire’s axis and comprises of four layers of
atoms (see Fig.5(b)).
14
Lattice constant
Young’s modulus (E)
Shear modulus (G)
Poisson’s ratio (ν)
0.3561 nm
1052 GPa
641 GPa
0.09
Table 1: Lattice constant and material parameters for diamond.
2
0.3
1
nm
nm
0.2
0
0.1
[1 0 0]
axial direction
0
−1
[0 0 1]
2
[0 1 0]
−2
−2
−1
0
nm
1
1
0
nm
2
(a)
−1
−2 −2
−1
0
1
2
nm
(b)
Figure 5: A typical fundamental domain of a circular diamond nanowire of 1.6 nm radius (509
atoms): (a) axial view. (b) side view.
7.1
Effect of surface relaxation
In order to understand the passage from nano to continuum scale, it is important to study the
effect of surface relaxation on constitutive laws. We focus on a simple case of axial straining of a
circular nanowire which we first present from a purely continuum perspective. We then compare
the continuum results with those from atomistic calculations. Assume the wire to be made up of
isotropic material governed by linear elasticity. Due to circular symmetry, no shear strain would
develop in it. In fact, any material point of the wire would displace only in the radial direction.
Hence,
ǫRR =
∂u
,
∂R
ǫθθ =
u
.
R
(37)
Here u(R) denotes the radial displacement. The strain ǫzz is prescribed to the nanowire. Upon
substituting (37) in the equilibrium equations of elasticity, we get u(R) = cR for some constant ‘c’.
Let ‘r’ denote the relaxed radius of the nanowire and ‘R’ its unrelaxed radius in the bulk crystal.
. To account for the effect of surface relaxation, the energy per
We then obtain ǫRR = ǫθθ = r−R
R
15
0.38
1,000
relaxed length of simulation cell (L0)
relaxed length (HCB, PBC)
3−d lattice constant = 0.3561 nm
0.3561(1+2νη/(RE))
Axial force (eV/nm)
500
0.37
0.36
0.35
0
ε= −0.003 (HCB, PBC)
ε= 0.000 (HCB, PBC)
ε= 0.003 (HCB, PBC)
ε= 0.006 (HCB, PBC)
2
πR Eε − 2πRνη
0
surface stress = 54.9 N/m
−500
1
2
3
radius of nanowire (nm)
−1,000
0
4
(a)
1
2
3
radius of nanowire (nm)
4
(b)
Figure 6: Effect of surface relaxation: (a) convergence of relaxed length of the fundamental domain
to diamond’s lattice constant. (b) contour plots for axial force vs radius of the nanowire at constant
axial strain.
unit unrelaxed length (Φ) of the wire can be written as
2 1
Φ = πR
σ :: ǫ + 2πrη
2
πE
(r − R)2 + 2νǫzz R(r − R) + .5R2 (1 − ν)ǫ2zz + 2πrη.
=
(1 + ν)(1 − 2ν)
(38)
Here η denotes the surface stress of diamond’s lateral surface. Upon minimizing Φ in (38) with
respect to the unknown relaxed radius r and further using Hooke’s law, we obtain the following
expression for axial force in the wire:
F = πR2 Eǫzz − 2πRνη.
(39)
Using formula (39), we can also find the axial strain (ǫzz ) at which the axial force vanishes, i.e.,
ǫzz = 2νη
. Accordingly, the relaxed length of the fundamental domain for a nanowire of unrelaxed
ER
radius (R) would be
2νη
.
(40)
L0 (R) = 0.3561 1 +
ER
We now perform minimization of the fundamental domain energy (based on the HCB rule) for
different radii of the nanowire and at different axial strains. The “zero axial strain” state is taken
to be the one for which the axial length of the fundamental domain equals the diamond’s lattice
constant. The energy of the fundamental domain is then minimized using (30) and the axial force is
16
computed using (32). To obtain the relaxed length of the fundamental domain for a given radius, the
fundamental domain is strained such that the axial force in it vanishes. Since, the nanowire is only
being axially strained (at zero twist), we can also use conventional molecular statics using periodic
boundary conditions (PBC) to compute the axial force as well as the relaxed length. The results
from both the HCB and PBC computations match exactly since the HCB formulation reduces to
the PBC technique for the special case of axial straining. These results are plotted in Figs.6(a,b).
According to (39), the axial force is quadratic in the unrelaxed radius of the wire but becomes
linear when the imposed axial strain (ǫzz ) is zero. The results from atomistic calculations in Fig.6(b)
clearly support these observations. The coefficients obtained from data fitting of the axial force
atomistic data with a quadratic polynomial are tabulated in Table 2. On comparing with (39), the
surface stress “η” of the diamond crystal can be obtained as
η=−
B
= 54.9 N/m.
2πν
(41)
With the value of the surface stress (η) taken from (41) and the Young’s modulus (E) and the
Poisson’s ratio (ν) taken to be that of the bulk diamond crystal (see Table 1), we use formulae
(40) and (39) to plot the relaxed fundamental domain length and the axial force in Fig.6. We note
that the continuum formulas reproduce the atomistic data obtained from the HCB rule accurately.
This illustrates that continuum mechanics, when augmented with surface effects, holds even at the
nanoscale.
ǫzz
0.000
F = A R2 + B R + C
A (πEǫzz ) B (-2πνη)
-0.69
-197.24
C (0)
19.74
Table 2: Coefficients of a quadratic polynomial obtained after fitting the axial force data.
7.2
Convergence of stiffnesses to their continuum limits
We now show that as the radius of the nanowire increases, its various stiffnesses converge to a
continuum limit. Fig.7(a) plots the ratio of stiffnesses of the nanowire in its relaxed configuration
(obtained using formula (33)) against the nanowire’s unrelaxed radius. Based on classical formulas
for stiffnesses of a circular rod, the ratio of these stiffnesses can be obtained as follows:
twisting stiffness
B
GJ
2G
≡
=
=
,
bending stiffness
A
EI
E
C
κGA
G
shearing stiffness
≡
=
=κ ,
extensional stiffness
D
EA
E
C
2A
shear correction factor(κ) =
×
.
D
B
(42)
We indeed note from Fig.7(a) that the ratio of twisting to bending stiffness converges to the conwhile the ratio of shearing to extensional stiffness allows us to deduce the shear
tinuum limit of 2G
E
17
0.5* twisting stiffness/bending stiffness (HCB)
shearing stiffness/extensional stiffness (HCB)
G/E = 0.61 (diamond lattice)
1600
3
ratio of moduli
1200
Scaled torque (T=Tλ/λ )
1.2
0.8
0.5342 nm (HCB)
1.2464 nm (HCB)
1.9586 nm (HCB)
2.6708 nm (HCB)
3.3830 nm (HCB)
800
shear correction factor = 0.88
0.4
400
0
0
1
2
3
radius of the nanowire (nm)
0
0
4
(a)
0.1
0.2
Scaled twist (κ3=λ x κ3,λ)
0.3
(b)
Figure 7: (a) ratio of the nanowire’s stiffnesses in its stress-free reference configuration. (b) nonlinear
torque vs twist response of the nanowire for different radii.
correction factor atomistically. We obtained the shear correction factor to be 0.88 which is very
close to 0.87 based on its continuum formula (Cowper (1966), see equation (43) below).
κ=
6(1 + ν)
(for circular beams).
7 + 6ν
(43)
Similarly, Fig.7(b) plots the scaled twisting response of a diamond wire (at zero axial strain) for
different radii of the nanowire. As per the discussion in Section 6, the twist value is scaled to
k3 = λk3,λ while the torque is scaled to T = Tλ /λ3 and then plotted in Fig.7(b). We clearly note
that as the radius of the nanowire increases, the scaled response converges to a nonlinear continuum
response.
8
Comparison of HCB formulation with existing techniques
We now compare our formulation with existing techniques for deriving stiffnesses of nano and
continuum rods.
8.1
Continuum rods
In Table 3, we show stiffnesses of a circular isotropic continuum rod derived using various techniques. We see that, except for twisting stiffness, all other stiffness values obtained using the rigid
kinematics assumption (eq.(9)) are inaccurate. The formulation of Simo and Vu-Quoc (1991) is
also based on the assumption of in-plane cross-sectional rigidity. But, they later make an ad hoc
assumption for normal traction on a typical cross-section to be “E(ν3 − 1)” which, although correct
for small deformations, is inconsistent with their rigidity assumption. Due to this, they are able to
18
A
Rigid kinematics (eq.(9))
Simo & Vu-Quoc (1991)
Mora and Muller (2003)
Classical solution
HCB rule
(1−ν)
EI (1+ν)(1−2ν)
EI
EI
EI
EI
B
GJ
GJ
GJ
GJ
GJ
C
GA
GA
×
6
GA
7
6
GA
7
D
(1−ν)
EA (1+ν)(1−2ν)
EA
×
EA
EA
coupling
−
−
×
−−
X
nonlinearity
−
×
×
−−
X
Table 3: Stiffnesses of an isotropic circular rod obtained using various techniques: entries in red
are inaccurate. The meaning of other symbols are as follows. “×”: cannot be derived, “−”: gives
inaccurate result, “−−”: no technique exists, “X”: accurate estimate can be deduced.
obtain correct values for stretching and bending stiffnesses but shearing stiffness is still inaccurate.
Mora and Muller (2003) rigorously derived a general expression to obtain the linear constitutive
laws of arbitrarily shaped cross-sections using Γ−convergence. But their method, being applicable
only for Kirchoff rods, cannot deduce shearing and stretching stiffnesses. We make a note that different expressions of the shear correction factor (derived using different kinematic approximations)
for a Timoshenko beam have been proposed in the literature (Timoshenko, 1940; Cowper, 1966;
Hutchinson, 2001) but they all match at “0” poisson’s ratio ( 67 for isotropic circular rods). Since
our formulation does not impose any ad hoc kinematic approximation on warping, we do not obtain
any analytical expression for the correction factor but we found the obtained numerical value to
match with 67 . We also emphasize that the HCB formulation is unique with regards to obtaining
the coupling stiffnesses as well as material non-linearity (the rigid kinematic model can also be used
to deduce them but the values obtained would be highly inaccurate). The analytical expression for
the extension-twist coupling stiffness (E) based on our formulation turns out to be
E = E1 − 2G12 (1 + ν21 ) J θ (for thin tubes having low intrinsic twist θ).
(44)
The formula (44) holds only for thin circular tubes made up of orthotropic material. Here “E1 ” is
the Young’s modulus along the principal material direction which twists about the tube axis with
twist “θ” whereas “G12 ” and “ν21 ” are the shear modulus and the poisson’s ratio in the lateral
surface of the tube. The formula for a thin tube but with large intrinsic twist is relatively longer
(Singh et al., 2016). As per the formula, the coupling stiffness is proportional to intrinsic twist only
for low intrinsic twist but becomes identically zero for isotropic rods even at large intrinsic twist.
8.2
Nanorods
We now compare our approach with existing schemes for deriving stiffnesses of nanorods. We
take a specific example of a (10,10) single-walled carbon nanotube (SWCNT). The Tersoff-Brenner
potential (Brenner, 1990) is used to model the interaction between carbon atoms. We clearly see
from Table 4 that our scheme is versatile since accurate estimates of all stiffnesses can be obtained.
The other schemes either cannot derive one or more stiffnesses or they give inaccurate result. For
example, if we impose the general Cosserat rod kinematics in which the cross-sectional directors
can change their magnitude and also the angle between them, a typical circular cross-section of a
CNT will at most deform into a planar ellipse (Kumar and Mukherjee, 2011). Yang and Weinan
19
Periodic boundary condition
General Cosserat rod kinematics
2-parameter family (James
(2006))
Hakobyan et al. (2012)
HCB rule
eV
nm
A eV·nm
×
B eV·nm
×
×
2261
1068
1978
1544
1068
1544
1544
×
1068
eV
nm
E eV
×
F eV
6363
0
0
×
6363
0
×
×
1086
6363
6363
×
0
×
0
C
D
6363
×
Table 4: Stiffnesses of a (10,10) SWCNT in its relaxed state obtained using various techniques:
entries in red are inaccurate. The symbol “×” implies the particular stiffness cannot be derived.
(2006) also imposed this kinematics in their model. We see from the Table that this restricted
form of in-plane warping leads to higher bending and shearing stiffnesses. In fact, if we impose
even more restrictive special Cosserat rod kinematics (rigid cross-section), the stiffnesses obtained
would be even higher (see Fig.8(a)). Chandraseker et al. (2009) also estimated the stiffnesses of
a (9,6) SWCNT by imposing periodic boundary conditions (PBC) on its unit cell. To derive the
bending stiffness, e.g., they imposed clamped-clamped bending deformation on a periodic unit cell
of a (9,6) SWCNT and assumed that the unit cell itself bends like a rod. The same deformation
was also imposed on the images of the unit cell to enforce periodicity. Being just 2 nm in length,
the unit cell actually deforms like a shell. They accordingly derive inaccurate bending stiffness
(about 1/60 of EI). Hakobyan et al. (2012) proposed a novel scheme to simultaneously bend and
stretch a nanorod. However, since shearing is not allowed in their model, their method cannot
deduce several of the stiffnesses. With regards to coupling stiffnesses, the 2-parameter approach
of James (2006) can be used to deduce accurate estimate of the extension-twist coupling while
bending-stretching coupling can be deduced using the scheme of Hakobyan et al. (2012). However,
several other coupling stiffnesses (e.g., bending-shear, bending-twisting etc.) cannot be derived
using any of the existing schemes. The HCB rule can accurately deduce all of them (see Fig.8(b)
for extension-twist (E) and bending-shear coupling (F )).
To establish that the stiffness values obtained using our approach are indeed accurate (in particular
the shearing stiffness for which no reference exists), we present in Fig.9 the critical Euler buckling
load of a (10,10) SWCNT based on various continuum rod models - the constitutive laws for all
the models are derived using the HCB rule. The boundary condition is of clamped-clamped type.
2
Accordingly, the buckling load is normalized by 4πL2A where “L” is the length of the SWCNT and A
is its bending stiffness in the relaxed state. As evident from Fig.9, the results from fully atomistic
calculations match most closely with the finite element special Cosserat rod solutions (Kumar and
Healey, 2010) when full nonlinear constitutive laws are input to the finite element model. There
is a slight mismatch in their values at smaller lengths where the SWCNT also has the traits of a
two-dimensional shell (Buehler et al., 2004). There are two other curves generated using nonlinear
constitutive laws: one in which the shear correction factor is forced to be unity and the other in
which the rod is unshearable (shear correction factor being infinity; the nonlinear constitutive laws
required for this model can also be deduced using the scheme of Hakobyan et al. (2012)). Both the
curves are very different from fully atomistic results while the one in which unmodified shearing
stiffness is input to the FEM model (special Cosserat rod, nonlinear) matches closely with fully
20
3
300
without relaxation
with relaxation
coupling stiffness (eV)
bending stiffness (normalized)
bending−shearing
extension−twist
2
100
0
−100
1
0
0.01
0.02
compressive strain
0.03
−300
−0.4
−0.2
0
twist (κ )
0.2
0.4
3
(a)
(b)
Figure 8: (a)Effect of relaxation of atoms in the fundamental domain on bending stiffness.
(b)Variation in coupling stiffnesses of a (10,10) SWCNT as it is twisted.
Buckling load (normalized)
1.1
1
fully atomistic
special Cosserat, nonlinear
special Cosserat, linear
special Cosserat, nonlinear, κ = 1
unshearable, nonlinear
Kirchoff limit
0.9
20
30
40
50
Length of SWCNT (nm)
60
70
Figure 9: Buckling load of a (10,10) SWCNT vs the length of the SWCNT for different rod models.
21
atomistic results. This suggests that the shearing stiffness obtained using the HCB rule is accurate.
We can also note better accuracy of the results obtained from the special Cosserat rod solution
based on nonlinear constitutive laws over that of linear constitutive laws.
9
Conclusions and discussion
We presented a novel helical Cauchy-Born rule (HCB rule) to deduce linear as well as nonlinear
elastic constitutive laws for nano and continuum rods. Just as translational periodicity is employed
to generate images of a unit cell in the standard CB rule, we employ helical symmetry to generate
images (see (27)). The key concept in our method is the introduction of constraints (see (20)
and (28)) using which we generate full 6-parameter uniform helical configurations relevant for the
theory of special Cosserat rods. In the absence of these constraints, the HCB rule reduces to the 2parameter approach of James (2006). We also showed that for the case of coupled bending-stretching
deformations, our method reduces to that of Hakobyan et al. (2012). Our method allows us to deduce
shearing stiffness and several coupling stiffnesses of a nanorod for the first time. We also presented
a scheme to derive the stiffnesses of a continuum rod through atomistic calculations of nanowires of
increasing radii. An interesting effect of surface relaxation on axial force of a nanorod (observed in
HCB computations) was explained accurately using linear elasticity theory augmented with surface
effects. We showed finally that our method is more general and accurate than existing techniques
with regards to deducing the stiffnesses of both nano and continuum rods. Having established the
versatility of our scheme, the method can now be employed to investigate interesting deformations
in nanorods and nanotubes, e.g., buckling phenomena due to large compression and twist, where
material linearity is not sufficient and the knowledge of accurate nonlinear material laws is crucial
(Gupta and Kumar, 2016).
An immediate next step is to deduce analytical formulas for various coupling stiffnesses of an
intrinsically twisted continuum rod in its stress-free reference configuration. We would need to
solve the linearized version of the minimization problem (17) in presence of linearized form of the
constraint equations (20).
Since the method presented allows us to deduce the constitutive laws of a rod at zero temperature, an obvious extension of the proposed rule is to include the effect of finite temperature and
derive nonlinear thermoelastic constitutive laws for a rod. This is more important from the point
of view of biomolecules (e.g., collagen, DNA etc.) where thermal fluctuations play significant role
in their elastic response.
A limitation of the method is that it allows us to only study elastic deformations in rod-like
nanostructures or continua. Often defects or fracture occurs in rod-like nanostructures due to severe
stretching, twisting or bending. In such a scenario, our model can be readily employed within the
large portion of the domain away from these defects and bridged to a fully atomistic model in the
region of defect. However, the details of coupling the atomistic and continuum domains in the rod
theory setting need to be investigated in detail.
10
Acknowledgments
We thank the anonymous reviewers for their several useful suggestions. P.G. acknowledges support
from the DST-Inspire fellowship.
22
A
Computing inter-atomic energy of the fundamental domain (EF D )and its derivatives
The energy of the fundamental domain depends on positions of the atoms within the FD as well as
their images which lie within the cut-off radius. The locations of the image atoms are calculated
using formula (27). Once we know these atomic locations, we can use a standard procedure to
compute the inter-atomic energy of the fundamental domain. In order to minimize EF D (see (30))
and also to deduce the constitutive laws (see (32) and (33)), we need to calculate the derivatives of
EF D with respect to atomic positions (xj ) as well as strains which essentially implies computing the
derivatives of atomic positions and their images (both xj and xi,j ) with respect to xj and strains.
The map (27) does not turn out to be useful for this purpose. In fact, the derivative of the map
(27) with respect to the strain “k” (evaluated at zero strain) possesses a non-removable singularity.
We, therefore, use the following formula equivalent to (27) for this purpose:
Z iL0
(45)
xi,j =
Rsθ ds v + RiL0 θ xj .
0
From (45), we note that computing the derivatives of xi,j with respect to xj and v are straightforward. However, computing the derivatives with respect to k necessitates taking derivatives of the
rotation matrix (as well as its integral) with respect to k. Analytical formulas for these derivatives
are now presented for the readers’ convenience.
B
Derivative of atomic positions with respect to strains
From (45), the derivatives of xi,j with respect to strains follow as:
Z iL0
∂xi,j
=
Rsθ ds,
∂v
0
∂ 2 xi,j
= 0,
∂v2
Z iL0
∂Rsθ
∂ 2 xi,j
=
ds,
∂v∂k
∂k
0
Z iL0
∂xi,j
∂Rsθ
∂RiL0 θ
=
ds v +
xj ,
∂k
∂k
∂k
0
Z iL0 2
∂ 2 RiL0 θ
∂ Rsθ
∂ 2 xi,j
+
=
ds
v
xj .
∂k2
∂k2
∂k2
0
(46)
Now, we show the derivatives of the rotation matrix as well as its integral with respect to k. Let
ψ = |k|, u = ψk denote the axis of rotation and θ = sψ be the angle of rotation. Also, let [u]×
and [ei ]× denote the skew symmetric matrices whose axial vectors are u and ei respectively. Note
that the definition of θ here is different from the earlier definition but simplify our notations below.
Using Rodrigues’ formula for rotation, we get
R(s) = exp(sK) = cos(θ)I + sin(θ) [u]× + (1 − cos(θ))u ⊗ u.
23
(47)
Now, u being a constant, Rodrigues’ formula (47) can be integrated analytically which is shown
below in (48). The formulas for the derivatives of (47) and (48) are also shown below. Since these
formulas contain a removable singularity at θ = 0, a Taylor expanded version (with singularity
removed) is used in such situations.
Z
1 − cos(θ)
θ − sin(θ)
sin(θ)
I+
[u]× +
u⊗u .
R=
s
θ
θ
θ
θ
θ2
θ2
θ2
θ2
=
s (1 − )I + (1 − ) [u]× + (1 − )u ⊗ u
(if θ ≈ 0).
6
2
12
6
20
=
sI (if θ = 0).
(48)
cos(θ)θ − sin(θ)
∂R
sin(θ)
= s − sin(θ)ui I +
ui [u]× +
[ei ]× +
∂ki
θ
θ
sin(θ)θ − 2(1 − cos(θ))
1 − cos(θ)
ui u ⊗ u +
(ei ⊗ u + u ⊗ ei ) .
θ
θ
θ2
θ4
θ3
θ2
θ2
+
) [ei ]× − ui u ⊗ u
= s − sin(θ)ui I − (1 − )ui [u]× + (1 −
3
10
6
120
12
2
θ
θ
+ (1 − ) (ei ⊗ u + u ⊗ ei )
(if θ ≈ 0).
2
12
= s [ei ]× (if θ = 0).
Z
(49)
1 − cos(θ)
θsin(θ) − 2(1 − cos(θ))
∂R
2 cos(θ)θ − sin(θ)
= s
ui I +
ui [u]× +
[ei ]×
2
2
∂ki
θ
θ
θ2
θ − sin(θ)
3sin(θ) − 2θ − cos(θ)θ
ui u ⊗ u +
(ei ⊗ u + u ⊗ ei ) .
+
θ2
θ2
1
θ
θ2
θ2
θ2
1
2
= s − (1 − )ui I − ui [u]× + (1 − ) [ei ]× − θ3 ui u ⊗ u
3
10
12
2
12
60
2
θ
θ
+ (1 − )(ei ⊗ u + u ⊗ ei )
(if θ ≈ 0).
6
20
s2
[ei ]× (if θ = 0).
(50)
=
2
Similarly, the second derivative of the rotation matrix and its integral can be obtained.
C
Derivative of [{x̂j } , λ̂, δ̂] with respect to strains
In this section, we first derive an expression for the derivative of [{x̂j } , λ̂, δ̂] with respect to strains
and finally show that the second term in eq.(32)(a) vanishes, i.e.,
∂ x̂j
∂EF D ·
= 0.
(51)
∂xj (v,k)
∂[v, k]
24
We first observe that (30) holds at all strains. Differentiating the three equations in (30) with
respect to strains, we then obtain
∂ 2 Econs
∂[{x̂j } , λ̂, δ̂]
∂ 2 Econs
+
= 0.
∂[{xj } , λ, δ]∂[v, k] ∂[{xj } , λ, δ]2
∂[v, k]
(52)
Let us define a stiffness matrix K3m×3m and the linearized constraint matrix C3m×6 such that its
block-components are as shown below:
h
2
i
∂ Econs ∂ 2 Econs
∂ 2 EF D
3×6
3×3
= I3×3 xi 3×3 .
(53)
, Ci =
Kij =
∂xi ∂xj
∂xi ∂λ ∂xi ∂δ
0 xi,3 xi,2
Here I is an identity matrix whereas xi = xi,3 0 xi,1 is a matrix formed by three components
xi,2 xi,1 0
of the position vector of ith atom. We can then write (52) in the following matrix form:
3m×6
3m×6
3m×3m
∂
x̂
i
∂ 2 EF D
3m×6
∂[v,k]
Kij + δij δ
C
.
(54)
= − ∂xi ∂[v,k]
T
6×6
6×6
C
0
6×6
∂[λ̂, δ̂]
0
∂[v,k]
The equation (54) can be inverted to obtain the derivatives
j } , λ̂, δ̂] with respect to strains.
of [{x̂
∂ x̂i
= 0. This further implies that
Now, upon block multiplication in (54), we see that CT
∂[v, k]
∂ x̂i
is perpendicular to columns of C. Using Q-R factorization of C, we then obtain
∂[v, k]
3m×6
6×6 6×(3m−6) T
∂ x̂i
3m×(3m−6)
= Q2 z3m−6 .
(55)
C = Q1
Q2
R1
0
= Q1R1 ⇒
∂[v, k]
Upon pre-multiplying the first set of block equations in (54) by Q2T and substituting (55), we then
obtain
2
∂ EF D
T
T
Q2 Kij + δij δ Q2 z = −Q2
∂xi ∂[v, k]
−1
2
∂ x̂i
∂ EF D
T
T
⇒
Q2
= −Q2 Q2 Kij + δij δ Q2
.
(56)
∂[v, k]
∂xi ∂[v, k]
Now using (30) and (53), we get:
∂EF D
∂Econs
λ
T ∂Econs
T ∂EF D
=
+C
⇒ Q2
= Q2
.
(57)
δ
∂xi
∂xi
∂xi
∂xi
Finally,
−1
2
∂ x̂i
∂EF D
∂ EF D
∂EF D
T
T
·
=
· Q2 Q2 Kij + δij δ Q2
Q2
∂xi
∂[v, k]
∂xi
∂xi ∂[v, k]
−1
2
∂ EF D
T ∂Econs
T
T
= Q2
Q2
· Q2 Kij + δij δ Q2
∂xi
∂xi ∂[v, k]
= 0 (using (57) and (30)a).
(58)
25
References
Antman, S.S., 1995. Nonlinear problems of elasticity. Springer-Verlag, New York.
Arroyo, M., Belytschko, T., 2002. An atomistic-based finite deformation membrane for single layer
crystalline films. J. Mech. Phys. Solids. 50, 1941-1977.
Bozec, L., van der Heijden, G. and Horton, M, 2007. Collagen Fibrils: Nanoscale Ropes. BioPhys.
J. 92, 70-75.
Brenner, D.W., 1990. Empirical potential for hydrocarbons for use in simulating the chemical vapor
deposition of diamond films. Phys. Rev. B. 42, 9458.
Buehler, M., Kong, Y., Gao, H., 2004. Deformation mechanisms of very long single-wall carbon
nanotubes subject to compressive loading. J. Eng. Mater. Technol. 126, 245-249.
Cai, W., Fong, W., Elsen. E.and Weinberger, C.R., 2008. Torsion and bending periodic boundary
conditions for modeling the intrinsic strength of nanowires, J. Mech. Phys. Solids. 56, 3242-3258.
Chandraseker, K., and Mukherjee, S., 2006. Coupling of Extension and Twist in Single-Walled
Carbon Nanotubes. J. Appl. Mech, 73, 315-326.
Chandraseker, K., and Mukherjee, S., Paci, J. T., Schatz, G. C., 2009. An atomistic-continuum
Cosserat rod model of carbon nanotubes, J. Mech. Phys. Solids. 57, 932-958.
N. Chouaieb and J. H. Maddocks, 2004. Kirchoff ’s problem of helical equilibria of uniform rods. J.
Elasticity, 77 221-247
Cowper G.R., 1966. The shear coefficient in Timoshenko’s beam theory. J. Appl. Mech., 33, 335-340.
Dayal, K. and James, R.D., 2010. Nonequilibrium molecular dynamics for bulk materials and nanostructures. J. Mech. Phys. Solids. 58, 145-163.
Dumitrica, T. and James, R.D., 2007. Objective molecular dynamics. J. Mech. Phys. Solids. 55,22062236.
Ericksen, J.L., 1977. Special topics in elastostatics, Advances in Applied Mechanics., 17, 189-244.
Ericksen, J. L., 2008. On the Cauchy-Born rule. Math. Mech. Solids. 13, 199-220.
Fang, C., Kumar, A., Mukherjee, S., 2013. Finite element analysis of carbon nanotubes based on a
rod model including in-plane cross-sectional deformation. Int. J. Solids. Struct., 50, 49-56.
Friesecke, G. and James, R.D., 2000. A scheme for the passage from atomic to continuum theory
for thin film, nanotubes and nanorods. J. Mech. Phys. Solids, 48, 1519-1540.
Gupta,P. and Kumar, A., 2016. Effect of material nonlinearity on Euler buckling of nanorods and
nanotubes (in preparation).
Goriely, A. and Tabor, M., 1998. Spontaneous Helix hand Reversal and Tendril Perversion in
Climbing Plants. Phys. Rev. Lett. 80, 1564.
26
Gould, T., Burton, D.A., 2006. A Cosserat rod model with microstructure. New J. Phys. 8, 137(117).
Goyal, S., Perkins, C. and Lee, C.L., 2005. Nonlinear dynamics and loop formation in Kirchoff rods
with implications to the mechanics of DNA and cables. J. Comp. Phys. 209, 371-389.
Hakobyan, Ye.,Tadmor, E. B. and James, R.D., 2012. Objective quasicontinuum approach for rod
problems. Phys. Rev. B., 86, 245435.
Healey, T.J., 2002. Material symmetry and chirality in nonlinearly elastic rods. Math. Mech. Solids.
7, 405-420.
Hutchinson, J.R., 2001. Shear coefficients for Timoshenko beam theory. J. App. Mech., 68, 87-92.
James, R. D., 2006. Objective Structures. J. Mech. Phys. Solids. 54, 2354-2390.
Klein C.A. and Cardinale G.F., 1993. Young’s modulus and Poisson’s ratio of CVD Diamond. Diam.
Relat. Mater. 2, 918-923.
Kumar, A., Healey, T.J., 2010. A generalized computational approach to stability of static equilibria
of nonlinearly elastic rods in the presence of constraints. Comp. Methods App. Mech. Engrg. 199,
1805-1815.
Kumar, A., Mukherjee, S., 2011. A Geometrically Exact Rod Model including in-plane crosssectional deformation. J. App Mech. 78, 011010.
Kumar, A., Mukherjee, S., Paci, J.T., Chandraseker, K., and Schatz, G.C., 2011. A rod model
for three dimensional deformations of single-walled carbon nanotubes. Int. J. Sol. Structs. 48,
2849-2858.
Love, A.E.H., 2000. A treatise on the mathematical theory of elasticity. Dover Books.
Manning, R.S., Maddocks, J.H., and Kahn, J.D., 1996. A continuum rod model of sequencedependent DNA structure. J. Chem. Phys. 105,5626.
Miller, R. and Shenoy, V.B., 2000. Size-dependent elastic properties of nano-sized structural elements. Nanotechnology, 11,139-147.
Miller, J.T., Lazarus,A., Audoly,B. and Reis, P.M.,2014. Shapes of a suspended curly hair,Phys.
Rev. Lett, 112, 068103.
Mora, M.G. and Muller, S., 2003. Derivation of the nonlinear bending-torsion theory for inextensible
rods by Γ-convergence. Calc. Var. 18, 287-305.
Moroz, J.D. and Nelson, P., 1997. Torsional directed walks, entropic elasticity, and DNA twist
stiffness. PNAS 94, 14418-14422.
Palanthandalam-Madpusi, H. J. and Goyal, S., 2011. Robust estimation of nonlinear constitutive
law from static equilibrium data for modeling the mechanics of DNA, Automatica. 47, 1175-1182.
27
Schmidt, B., 2008. On the passage from atomic to continuum theory for thin films, Arch. Rational
Mech. Anal. 190, 1-55.
Simo, J. C., and Vu-Quoc, L., 1991, A Geometrically-Exact Rod Model Incorporating Shear and
Torsion-Warping Deformation, Int. J. Solids Struct. 27, 371-393.
Singh, R., Kumar, S., Kumar, A., 2016. Effect of anisotropy and intrinsic twist on coupled deformations in an elastic rod (in preparation).
Tadmor, E.B., Smith, G.S., Bernstein, N., Kaxiras, E., 1999. Mixed finite element and atomistic
formulation for complex crystals. Phys. Rev. B. 59, 235-245.
Tersoff, J., 1988. Empirical Interatomic Potential for Carbon, with Applications to Amorphous
Carbon. Phys. Rev. Lett. 61, 2879-2882.
Timoshenko, S.P., 1940. Strength of Materials, 2nd edn, D. Van Nostrand Company Inc. New York.
Upamanyu, M., Wang, H.L., Liang, H.Y., Mahajan, R., 2008. Strain dependent twist stretch elasticity in chiral filaments. J. R. Soc. Interface. 20, 303-310.
Wang, M.D., Yin, H., Landick,R., Gelles, J. and Block, S.M., 1997. Stretching DNA with optical
tweezers. Biophysical Journal. 72, 1335-1346.
Yang J.Z. and Weinan E., 2006. Generalized Cauchy-Born rules for elastic deformations of plates,
sheets and rods: Derivation of continuum models from atomistic models. Phys. Rev. B. 74, 184110.
Yoshikawa, M., Mori Y., Maegawa M., Katagiri G., Ishida H. and Ishitani A., Raman scattering
from diamond particles. Appl. Phys. Lett. 62, 3114.
28