PERFORMANCE OF APN GUIDANCE LAW IN ... AERIAL ENGAGEMENT SCENARIO
advertisement

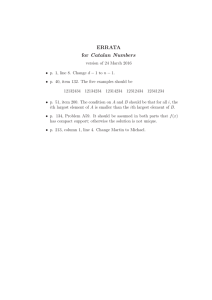
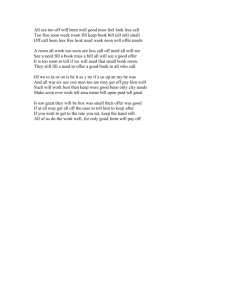
PERFORMANCE OF APN GUIDANCE LAW IN A TWO DIMENSIONAL AERIAL ENGAGEMENT SCENARIO K.N.Swamy, Scientist, Advanced Technology Programme and I.G.Sarma, Professor of Computer Science and Automation Indian Institute of Science, Bangalore, India. in P N , b u t f o r t h e e x t r a a d d i t i v e t e r m 1/2 "aT w h e r e , N' is t h e e f f e c t i v e n a v i g a t i o n r a t i o a n d aT is t h e t a r g e t a c c e l e r a t i o n . The t a r g e t and t h e missile a r e b o t h a s s u m e d to h a v e a c e l e r a t i o n s normal t o t h e chosen reference direction. In t h e a c t u a l i m p l e m e n t a t i o n of APN, t h e r e is t h e a d d i t i o n a l c o m p l e x i t y of having to e s t i m a t e t h e t a r g e t m a n e u v e r o n b o a r d t h e missile. T h e t a r g e t m o d e l s t h a t a r e g e n e r a l l y u s e d in l i t e r a t u r e a r e t h o s e o b t a i n e d by passing w h i t e noise t h r o u g h a shaping f i l t e r [3,41. A step t a r g e t maneuver w i t h t h e t i m e of i n i t i a t i o n uniformly d i s t r i b u t e d o v e r t h e e n g a g e m e n t t i m e is shown t o c o r r e s p o n d t o w h i t e noise t h r o u g h a n i n t e g r a t o r [5]. Abstract In t h e a v a i l a b l e l i t e r a t u r e , t h e m a i n a d v a n t a g e c l a i m e d f o r APN is t h a t i t d e m a n d s a p r o g r e s s i v e l y d e c r e a s i n g missile a c c e l e r a t i o n in t h e c o n s t a n t t a r g e t m a n e u v e r s i t u a t i o n , as o p p o s e d to a n inc r e a s i n g missile a c c e l e r a t i o n f o r t h e m o r e c o n v e n t i o n a l PN guidance. This i n f e r e n c e is mainly b a s e d o n s t u d i e s w i t h o n e d i m e n s i o n a l models. The present study, based on a two dimensional m o d e l , n o t only i n c o r p o r a t e s a m o r e r e a l i s t i c t a r g e t m a n e u v e r , b u t a l s o c o n s i d e r s t h e effect of t a r g e t g l i n t c h a r a c t e r i s e d by c o r r e l a t e d noise. T h e missile acceleration a n d t h e m i s s - d i s t a n c e i n d u c e d by t a r g e t maneuver and glint a r e t h e two features of p e r f o r m a n c e i n v e s t i g a t e d in t h i s s t u d y . In t h e deterministic study, with target maneuver initiation o c c u r i n g a t v a r i o u s p o i n t s in t i m e , t h e a c c e l e r a t i o n profiles resemble t h e ones obtained from a linear q u a d r a t i c t r a c k i n g f o r m u l a t i o n of t h e g u i d a n c e problem. T h e r e s u l t s i n d i c a t e t h a t t h e r e is a consid e r a b l e i m p r o v e m e n t in t h e miss d i s t a n c e p e r f o r mance over PN, for maneuvers which a r e initiated w h e n t h e r e l a t i v e s e p e r a t i o n is small. The present study assumes a deterministic t a r g e t m a n e u v e r m o d e l , r e p r e s e n t e d by i n i t i a l l e v e l f l i g h t , f o l l o w e d by t h e e x e c u t i o n of a c o n s t a n t a c c e l e r a t i o n m a n e u v e r in t h e v e r t i c a l plane. F r o m a m o n g t h e v a r i o u s s o u r c e s of noise w h i c h affect t h e p e r f o r m a n c e , t h e effect of t a r g e t g l i n t c h a r a c t e r i s e d by c o r r e l a t e d noise is investig a t e d , s i n c e i t is t h e m o s t s i g n i f i c a n t . T h e missile a c c e l e r a t i o n a n d t h e miss-distance induced by t a r g e t maneuver and glint a r e t h e t w o features of p e r f o r m a n c e i n v e s t i g a t e d in t h i s study. 1. Introduction The studies have been carried-out under t h e following conditions: o n e in which t h e t a r g e t maneuver level and its initiation t i m e a r e assumed t o be known p r e c i s e l y a n d t h e o t h e r , w h e r e i n t h e t a r g e t m a n e u v e r is e s t i m a t e d by a w e i g h t e d least squares method with t h e attendant detection delay and estimation error. In a d d i t i o n t o P N , a version of L i n e a r Q u a d r a t i c (LQ) g u i d a n c e c a l l e d MAMS [61 is a l s o u s e d f o r c o m p a r i n g t h e performance. The comparative acceleration profiles a r e d i s c u s s e d for P N , APN a n d L Q g u i d a n c e s c h e m e s , a n d t h e miss d i s t a n c e s f o r t h e PN a n d APN s c h e m e s . C l a s s i c a l g u i d a n c e l a w s like t h e P r o p o r t i o n a l Navigation (PN) have been employed quite successfully in t h e p a s t f o r homing guidance. In p a r t i c u l a r , using low p a s s f i l t e r i n g t o a t t e n u a t e t h e noise i n h e r e n t in t h e g u i d a n c e signal a n d applying t h e P N l a w t o s t e e r t h e missile t o w a r d s t h e t a r g e t w o r k s well in benign e n v i r o n m e n t s . However, in r e c e n t y e a r s t h e p e r f o r m a n c e of t h r e a t a i r c r a f t h a v e i m p r o v e d s u b s t a n t i a l l y in t e r m s of s p e e d a n d agility. T h e p e r f o r m a n c e i m p r o v e m e n t r e q u i r e d of PN to m e e t t h e s e a d d i t i o n a l d e m a n d s i n c r e a s e s t h e a c c e l e r a t i o n r e q u i r e m e n t of t h e a i r f r a m e . While t h e r e is a g r e a t d e a l of published l i t e r a t u r e o n P N , t h a t a v a i l a b l e o n A u g m e n t e d PN ( A P N ) is s c a n t y . T h e e x h a u s t i v e s u r v e y p a p e r by P a s t r i c k e t & [ I ] w h i l e discussing PN a t l e n g t h , h a r d l y p r o v i d e s any i n f o r m a t i o n a b o u t APN. 2. Models for target maneuver and glint T h e c o m p a r a t i v e performance study for t h e t h r e e g u i d a n c e s c h e m e s r e q u i r e s developm e n t a n d u s e of s u i t a b l e m o d e l s f o r t a r g e t m a n e u v e r a n d glint. T h e t a r g e t m a n e u v e r m o d e l proposed h e r e is d e t e r m i n i s t i c involving a c o n s t a n t s t e p a c c e l e r a t i o n in t h e v e r t i c a l p l a n e till it l e v e l s off f o r r e t r e a t . On t h e o t h e r hand, b e i n g a noise t e r m , g l i n t is m o d e l l e d s t o c h a s t i c a l l y . T h e m a i n a d v a n t a g e c l a i m e d f o r APN by N e s l i n e a n d Z a r c h a n [2] is t h a t it d e m a n d s a progressively d e c r e a s i n g missile a c c e l e r a t i o n in t h e c o n s t a n t t a r g e t m a n e u v e r s i t u a t i o n , as o p p o s e d to a n inc r e a s i n g missile a c c e l e r a t i o n f o r t h e m o r e c o n v e n t i o n a l PN guidance. This is a c h i e v e d by e x p l i c i t l y i n c o r p o r a t i n g t h e t a r g e t a c e l e r a t i o n t e r m in t h e APN g u i d a n c e law. In o t h e r words, t h e c o m m a n d e d a c c e l e r a t i o n in APN h a s t h e s a m e f o r m a s t h a t Target maneuver models T h e p r o b l e m of how t o m o d e l t a r g e t a c c e l e r a - 209 CH2759-9/89/0000-0209 $1 .OO 0 1989 IEEE given by t i o n t o a c h i e v e i m p r o v e d missile p e r f o r m a n c e , h a s b e e n e x t e n s i v e l y discussed in l i t e r a t u r e . This is a c r i t i c a l problem a r e a f o r APN a n d L Q guidance implementations, since t h e estimat i o n of missile-to-target position, velocity a n d a c c e l e r a t i o n d e p e n d o n this. a2 = 3. PN Guidance Traditionally, homing i n t e r c e p t p r o b l e m s h a v e b e e n solved t h r o u g h t h e u s e of PN. This f o r m of g u i d a n c e l a w c o m m a n d s a missile a c c e l e r a t i o n which is p r o p o r t i o n a l t o t h e line-of-sight (LOS) r a t e a n d t h e proportionality f a c t o r is c a l l e d t h e Navigation r a t i o . T h e e n g a g e m e n t g e o m e t r y is shown in Fin.2. The commanded a c c e l e r a t i o n is given by a = N'V In t h e t a r g e t model proposed and used in t h i s study, i t is a s s u m e d t h a t t h e t a r g e t f l i e s level till t i m e t m a n ,a n d t h e n e x e c u t e s a c o n s t a n t m a n e u v e r aT till i t levels-off f o r a r e t r e a t as shown in Fig. 1. This model is j u s t i f i e d f r o m p r a c t i c a l considerations, s i n c e t h e t a r g e t generally pulls a m a x i m u m m a n e u v e r a n d r e t r e a t s a f t e r delivery of i t s weapon load. The m a n e u v e r is d e t e c t e d a n d e s t i m a t e d on board t h e missile a f t e r its occurrence a t t The m a g n i t u d e of t a r g e t veloc i t y VT is %%u";ned t o b e a c o n s t a n t . ACCELERATION iZ c V zl. TRAJECTORY TARGET FIG. 1 = Closing v e l o c i t y and N' = E f f e c t i v e n a v i g a t i o n r a t i o / b TIME I X where I I. c I / M (bl 1 LEVEL AND STEP TARGET MANEbVER c 01 FIG. 2 Glint Noise +g E2T9 a9 ' consnoise these 3met. GEOMETRY Choice of e f f e c t i v e navigation ratio T h e p e r f o r m a n c e of t h e missile is f i r s t c o n s i d e r e d a g a i n s t m a n e u v e r i n g t a r g e t s for different maneuver initiation times, for values of n a v i g a t i o n r a t i o N' in t h e r a n g e 3 t o 5. R e s u l t s f o r t h e d e t e r m i n i s t i c case i n d i c a t e t h a t t h e miss d i s t a n c e s d e c r e a s e with i n c r e a s i n g N'. T h e missile a c c e l e r a t i o n s a r e l a r g e r initially f o r N ' = 5 c o m p a r e d toN':3 o r 4. A c o m p a r i s o n of r e s u l t s f o r various N' in t h e r a n g e 4 t o 8 f o r t h e s t o c h a s t i c case ( w i t h g l i n t noise a n d f i l t e r ) r e v e a l s t h a t t h e c o m m a n d e d acce l e r a t i o n b e c o m e s very l a r g e a n d noisy f o r N'=8, essentially d u e t o t h e amplification of g l i n t noise. Based on t h e a b o v e studies, a c o m p r o m i s e v a l u e of 5 is c h o s e n f o r N'. Following [71, t o g e r a t e w h i t e noise of s p e c t r a l d e n s i t y ( 2 T g Z g ) , a w h i t e s e q u e n c e of v a r i a n c e 6 2 is g e n e r a t e d w i t h a spacing of A Assuming t h a t t h e c o r r e l a t i o n of t h e w h i t e s e q u e n c e drops t o z e r o o v e r A , a triangul a r c o r r e l a t i o n is obtained. S i n c e f o r s m a l l A , s p e c t r a l density is a p p r o x i m a t e l y t h e a r e a under t h e correlation curve, we have for t h e white sequence generated . Spectral density$ ENGAGEMENT T h e principal o u t p u t s of t h e missile s e e k e r a r e t h e dish r a t e which is a m e a s u r e of t h e line-of-sight r a t e , a n d t h e Doppler f r e q u e n c y which is proportional t o t h e closing velocity. T h e dish r a t e which is c o n t a m i n a t e d by glint noise is passed through a noise smoothing f i l t e r [2] t o o b t a i n t h e c o m m a n d e d a c c e l e r a t i o n as shown in Fig.3. G l i n t is c o r r e l a t e d noise which is r e p r e s e n t e d by passing w h i t e noise through a shaping filter. The e q u i v a l e n t w h i t e noise s p e c t r a l d e n s i t y is g i v e n by [31 Where T g a n d 6 g a r e t h e c o r r e l a t i o n t i m e t a n t and s t a n d a r d d e v i a t i o n of g l i n t respectively. R e p r e s e n t a t i v e values f o r p a r a m e t e r s [3] a r e Tg = 0.1 sec. a n d 6 g = X =A& Equating t h i s t o t h e e q u i v a l e n t g l i n t w h i t e noise s p e c t r a l d e n s i t y , w e see t h a t t h e w h i t e s e q u e n c e g e n e r a t e d will h a v e t h e v a r i a n c e 210 t o t h e r e f e r e n c e direction. In t h e A P N guid a n c e e q u a t i o n developed h e r e , t h e c o m m a n d e d missile a c c e l e r a t i o n of PN is a u g m e n t e d by a n e x t r a t e r m which h a s X a n d 2 c o m p o n e n t s of t a r g e t a c c e l e r a t i o n resolved n o r m a l t o t h e missile. , I E ( aT, s?-aT 2 1s - Seekor P - tn FIG. 3 Y 3 The APN Dynamic Model ?id T h e t a r g e t t o missile r e l a t i v e c o m p o n e n t s R I a n d R 3 a r e given by time constant 1/15 Noise (Ilter time conslurit separation R1 = V I SIMPLIFIED SCHEMATIC OF THE SEEKER LOOP R 3 = V3 w h e r e VI a n d V3, t h e t a r g e t t o missile r e l a t i v e velocity c o m p o n e n t s a r e g i v e n by V1 Noise filter time constant Since g l i n t noise h a s b e e n m o d e l e d as a w h i t e noise p r o c e s s t h r o u g h a f i r s t o r d e r f i l t e r of f r e q u e n c y 10 r a d / s e c , i t essentially c o n t a i n s low f r e q u e n c y c o m p o n e n t s . A low-pass f i l t e r of f r e q u e n c y 5 r a d i s e c ( T n = 0.2 s e c ) h a s b e e n i n t r o d u c e d to f i l t e r o u t t h e dish r a t e noise. This value h a s b e e n c h o s e n a f t e r studying t h e p e r f o r m a n c e of f i l t e r s with diffe r e n t t i m e c o n s t a n t s o v e r a r a n g e of 0.1 t o 0.5 sec. T h e m e a n miss d i s t a n c e s a t various maneuver initiation t i m e s have been investigated. T h e s m a l l e s t miss d i s t a n c e h a s b e e n o b t a i n e d f o r a f i l t e r t i m e c o n s t a n t of 0.2 sec. The f i l t e r w i t h T n = 0.2 sec, p e r m i t s t h e signal t o pass t h r o u g h w i t h o u t much a t t e n u a t i o n a n d c u t s off t h e noise e f f e c t i v e l y . F r o m t h e s e considerations, t h e t i m e c o n s t a n t of 0.2 sec is chosen. V3 = -a M SinyM + aT1 + aT3 = aMCosyM a T I a n d a T 3 a r e t h e c o m p o n e n t s of t a r g e t a c c e l e r a t i o n , a n d aM IS t h e missile a c c e l e r a t i o n . F r o m the engagement t a n X = R 1)- 3 geometry of Fig.2. 1 Hence, X = ( R ~ -V R ~~ v ~ ) /1( R3~ + R ~ ) Assuming t h a t t h e dish r a t e D I S proportional t o t h e .angular e r r o r including glint, we g e t D -U (E,, +e8 I , w h e r e & b is t h e boresight e r r o r a n d c g is t h e a n g u l a r glint noise a n d /4 is a c o n s t a n t ( / A = ‘&I.H e n c e D = -/J[(D - A ) +E& 4. APN Guidance Where D and a r e t h e dish a n g l e and t h e LOS a n g l e respectively. T h e flight p a t h a n g l e d,,is g i v e n by YM = APN Law T h e PN g u i d a n c e law - ac = NrV,X aMflM a n d t h e missile a c c e l e r a t i o n by a, c a n a l s o b e e x p r e s s e d as [2] aC - -(-aM+ac)/Ta a s s u m i n g a f i r s t o r d e r a u t o p i l o t lag of t i m e c o n s t a n t ra T h e a n g u l a r glint 6 , (Fig.4) is given by ( N ‘/tgo2 ) ( Y + ? t g o ) . w h e r e y = missile t a r g e t s e p a r a t i o n normal t o r e f e r e n c e direction R = Vctgo Vc = closine. s p e e d ( c o n s t a n t ) E, = (-E,+ wn) where * Y/R, E, * R L If t h e t a r g e t a c c e l a r a t i o n aT is considered, the commanded accelaration becomes + T h e outpu; ?f t h e noise f i l t e r is given by I ( D -K’/Twhich is a n e s t i m a t e of t h e LOS r a t e . T h e expression f o r c o m m a n d e d a c c e l e r a t i o n T h e g u i d a n c e law given a b o v e is t e r m e d as A u g m e n t e d PN. This d i f f e r s f r o m t h e PN in t h e inclusion of a n e x t r a t e r m d e p e n d e n t on t a r g e t accelation. H e r e t h e relative separation, r e l a t i v e velocity a n d t a r g e t a c c e l e r a t i o n a r e c o n s i d e r e d only in o n e d i r e c t i o n ; n a m e l y n o r m a l IS a, =-N‘IvcI$ 211 + N?, (a,Sin-),,- 3”) ~173c-s In a c o m p a n i o n p a p e r by t h e a u t h o r s [6], t h e r e f e r e n c e r e l a t i v e t r a j e c t o r y is d e r i v e d f r o m a pulsed missile a c c e l e r a t i o n , which h a s b e e n shown in l i t e r a t u r e t o b e t i m e a n d energy optimal. T h e w i d t h a n d l o c a t i o n of t h e p u l s e d e p e n d s upon t h e e n g a g e m e n t conditions, heading e r r o r a n d t a r g e t m a n e u v e r . T h e h e i g h t of t h e p u l s e c o u l d b e v a r i e d a c c o r d ing t o t h e l a t a x c a p a b i l i t y of t h e a i r f r a m e . Heading e r r o r r e q u i r e s a n initial pulse, while a constant g target maneuver demands another r e f e r e n c e pulse, c o i n c i d i n g with t h e m a n e u v e r initiation. T h e a b o v e set of e q u a t i o n s p r o v i d e t h e t r a j e c t o r y f o r t h e stat% v a r i a b l e s RI,R3,V I , V 3 , E g a n d A , w h e r e a T , a n d aT 3 A,d,,,,D,aM, a r e t h e c o m p o n e n t s of t a r g e t a c c e l e r a t i o n obtained from a n assumed target trajectory and E g is t h e g l i n t noise. T h e c o m m a n d e d a c c e l e r a t i o n ac is o b t a i n e d as a f u n c t i o n of s t a t e variables. -77 T T h e v e h i c l e a c c e l e r a t i o n follows t h e r e f e r e n c e p u l s e closely in t h e o p t i m a l g u i d a n c e scheme and t h e achieved acceleration remains s m a l l f o r a l a r g e p o r t i o n of t h e f!ight t i m e . 6. Study Conditions 'b*g- e FIG. L Unlike P N , b o t h APN a n d L Q g u i d a n c e need a t a r g e t maneuver detection and estimation s c h e m e on b o a r d t h e missle, s i n c e t a r g e t m a n e u v e r t e r m s a p p e a r e x p l i c i t l y in t h e guid a n c e a l g o r i t h m . A s t a t e m o d e l of planar engagement with a mesurement model employing t h e homing h e a d a n d a u t o p i l o t m e a s u r e m e n t s IS used for maneuver estimation. A Kalman f i l t e r a l g o r i t h m is a l s o e m p l o y e d f o r state e s t i m a t i o n in MAMS. T h e p r e s e n c e of noise affects t h e c o m m a n d e d a c c e l e r a t i o n through t h e dish r a t e in P N , w h i l e i t a f f e c t s t h e m e a s u r e m e n t c o v a r i a n c e in APN a n d L Q g u i d a n c e s c h e m e . T h e e s t i m a t i o n of t g o is e s s e n t i a l in L Q g u i d a n c e s c h e m e . PN a n d APN d o n o t need this estimate. BORE SIGHT ERRCR ANGULAR NOISE - MISSILE BODY AWE GEOMEIW OF SEEKER 5. LQ Guidance Maneuver detection and estimation S t a r t i n g f r o m t h e l a t e 1960's, s e v e r a l n e w e r f o r m s of g u i d a n c e laws using o p t i m a l control and differential g a m e theories have Modern guidb e e n proposed in l i t e r a t u r e [SI. a n c e a n d e s t i m a t i o n t h e o r i e s would allow t h e design t o "optimally" s e p a r a t e t h e signal f r o m t h e n o i s e by using i n f o r m a t i o n a b o u t t h e missile d y n a m i c s a n d noise c o v a r i a n c e s r a t h e r t h a n f i l t e r i n g b a s e d only on f r e q u e n c y c o n t e n t s . T h e e s t i m a t e s a r e t h e n used t o g e n e r a t e t h e g u i d a n c e signal (i.e., c o m m a n d e d a c c e l e r a tion) b a s e d upon a s u i t a b l y s p e c i f i e d o p t i m a l i t y c r i t e r i o n . This p e r f o r m a n c e index c a n b e s t r u c t u r e d t o i n c l u d e p e n a l t i e s o n u n d e s i r a b l e features l i k e trajectory deviations, excessive a c c e l e r a t i o n s etc. in a d d i t i o n t o miss d i s t a n c e . A s i m p l i f i e d K a l m a n f i l t e r d e n o t e d as SKF, w h i c h d o e s n o t c o n t a i n t h e m a n e u v e r t e r m is basically u s e d f o r m a n e u v e r d e t e c t i o n a n d e s t i m a t i o n . T h e m e t h o d used follows t h e input e s t i m a t i o n p r o c e d u r e of C h a n e t a1 [9]. In t h i s s c h e m e , t h e d i f f e r e n c e b e t w e e n t h e actual measurements and t h e s t a t e e s t i m a t e f r o m t h e S K F is o b t a i n e d a t s u c c e s i v e m e a s u r e ment points t o e s t i m a t e the target maneuver. Typically, t e n s a m p l e s of m e a s u r e m e n t s a r e u s e d t o a r r i v e a t a n e s t i m a t e of t a r g e t maneuver. A w e i g h t e d l e a s t s q u a r e s moving window a l g o r i t h m is a d o p t e d . S u c c e s i v e v a l u e s of t h e e s t i m a t e a r e used t o make a n assesment of t h e o c c u r e n c e of t h e m a n e u v e r by c o m p a r ing t h e m with a p r e s e t t h r e s h o l d value. A l a r g e d e p a r t u r e of m a n e u v e r e s t i m a t e f r o m t h e t h r e s h o l d signals d e t e c t i o n . To e s t i m a t e t h e l e v e l of t h e m a n e u v e r i t s e l f , a v a r i a n t of t h e m e t h o d proposed in [91 is used. T h e proposed m e t h o d u s e s i n c r e m e n t a l m e a s u r e m e n t s by c o n s i d e r i n g i n c r e m e n t s in t h e m e a s u r e m e n t s o v e r t h a t a t any c h o s e n t i m e point, a f t e r t h e detection has occured. The most commonly advocated approach t o t a c t i c a l missile g u i d a n c e is t h e o n e b a s e d on Linear-Quadratic-Gaussian theory. This f o r m u l a t i o n r e q u i r e s t h e d e v e l o p m e n t of a linear model for t h e engagement scenario a n d s e l e c t i o n of a s u i t a b l e p e r f o r m a n c e index t h a t r e s u l t s in a n e x p l i c i t f o r m f o r t h e solution. Incorporating model-tracking features and time-varying weights turns out t o be critical f o r o b t a i n i n g miss d i s t a n c e a n d a c c e l e r a t i o n p e r f o r m a n c e s u p e r i o r t o t h a t of PN a n d APN. Engagement Conditions Deterministic 212 and stochastic cases are b o t h c o n s i d e r e d . Only g l i n t noise i s included in t h e s t o c h a s t i c case. P e r f e c t d e t e c t i o n a n d e s t i m a t i o n implying n o d e t e c t i o n a n d e s t i m a t i o n e r r o r s , a n d n o i s e - f r e e dish r a t e s a r e a s s u m e d in t h e d e t e r m i n i s t i c runs. In t h e s t o c h a s t i c cases, detection and estimation procedures described e a r l i e r a r e used. Besides, t h e g l i n t n o i s e effect o n t h e dish r a t e is a l s o considered. T h e c o m m a n d e d a c c e l e r a t i o n is o b t a i n e d by passing t h e dish r a t e t h r o u g h a n o i s e f i l t e r in t h e s t o c h a s t i c cases. Both t h e cases of s h o r t a n d long r a n g e e n g a g e m e n t s a r e c o n s i d e r e d , with t h e t a r g e t m a n e u v e r i n g at d i f f e r e n t points, t o bring o u t t h e i r i n f l u e n c e on t h e a c c e l e r a t i o n p r o f i l e a n d m i s s d i s t a n c e . A m a x i m u m v a l u e of 6" i s a r b i t r a rily s p e c i f i e d f o r t h e h e a d i n g e r r o r (HE). T h e missile a c c e l e r a t i o n c a p a c i t y is a s s u m e d to b e bounded. A f i x e d v a l u e of 8g i s u s e d f o r t a r g e t accleration. '1 -. I / APN MAMS 7. Comparative Performance The main features t h a t a r e used for compa r i s o n in t h e d e t e r m i n i s t i c a n d s t o c h a s t i c cases a r e ( a ) a c c e l e r a t i o n p r o f i l e s a n d (b) m i s s d i s t a n c e s in P N , APN a n d L Q g u i d a n c e i m p l e m e n t a t i o n s . c 10 0.5 0.25 0.75 1.0 time FIG. 5 Accelerotion r e c p i r e m d comparison fcr early maneuver Deterministic situation ( a ) T h e a c c e l e r a t i o n b e h a v i o u r in t h e d e t e r m i n i s t i c cases is s h o w n in F i g u r e s 5 a n d 6 f o r early and l a t e maneuver occurence situations, f o r z e r o heading e r r o r a n d long i n t e r c e p t range.It is o b s e r v e d f r o m t h e f i g u r e s t h a t t h e a c c e l e r a t i o n is z e r o in all t h e cases till t h e o c c u r e n c e of m a n e u v e r , s i n c e t h e heading e r r o r is z e r o . When t h e m a n e u v e r o c c u r s , t h e c o m m a n d e d a c c e l e r a t i o n in APN a n d MAMS show a s u d d e n d i s c o n t i n u i t y unlike in PN. This i s b e c a u s e t h e t a r g e t m a n e u v e r itself c h a n g e s a b r u p t l y f r o m 0 to 8g a n d in t h e APN a n e x t r a t e r m i s a d d e d in ac t o t a k e a c c o u n t of t h e t a r g e t m a n e u v e r , w h i l e in MAMS ac is o b t a i n e d by using a pulsed a c c e l e r a t i o n f o r t r a c k i n g , which is i n t r o d u c e d suddenly b e c a u s e of t a r g e t maneuver. MKS DISTANCES (met) CONDITIONS PN APN MAMS A =L.o = 1.1 = 0.3 0 This way, in APN a n d MAMS a l a r g e a m o u n t of a c c e l e r a t i o n is a d d e d a t t h e s t a r t of t a r g e t m a n e u v e r itself. It is a d v a n t a g e o u s t o t u r n t h e missile when t h e s e p a r a t i o n is l a r g e , s i n c e t h i s would n e e d s m a l l p i t c h i n g motions. MAMS t a k e s a d v a n t a g e of t h e p r e d i c t e d point of i n t e r c e p t a n d s e t t l e s t o a s t r a i g h t l i n e c o u r s e . APN also h a s a n e a r similar behaviour e v e n t h o u g h t h e r e IS n o c o n c e p t of a p r e d i c t e d i n t e r c e p t p o i n t in APN. T h e c o m m a n d e d a c c e l e r a t i o n in P N shows n o s u c h d i s c o n t i n u i t y s i n c e t h e t a r g e t m a n e u v e r d o e s n o t c a u s e d i s c o n t i n u o u s dish r a t e changes. PN shows l a r g e v a l u e s of a c w i t h c h a n g e of sign, s i n c e t h e a c c e l e r a t i o n follows t h e dish m o t i o n . T h e v a r i a t i o n in a c c e l e r a t i o n a f t e r t h e c o m p l e t i o n of t h e pulse in APN IS m u c h s m a l l e r , w h i l e t h a t in MAMS is t h e s m a l l est. I t is i n t e r e s t i n g t o o b s e r v e t h a t t h e APN a c c e l e r a t i o n p r o f i l e r e s e m b l e s t h e MAMS p r o f i l e closely. The small acceleration requirement in APN m a k e s t h e blind p h a s e of t h e flight e a s y t o c o p e , a s in MAMS. FIG. 6 a2 0.4 0.6 0.8 lime Accdemtion requimment comparison for late manewer In APN, t h e c o n t r i b u t i o n initially of t h e t a r g e t acceleration t e r m t o t h e commanded a c c e l e r a t i o n i s of t h e s a m e sign as t h a t of dish r a t e ( b o t h being negative). H e n c e ac is a l a r g e n e g a t i v e q u a n t i t y in APN, r e a c h i n g s a t u r a t i o n value. In PN, t h e a c c e l e r a t i o n level u n d e r g o e s l a r g e excursions. F u r t h e r , t h e APN a c c e l e r a t i o n is m o r e u n i f o r m a r o u n d z e r o d u e t o t h e c o m b i n a t i o n of dish r a t e a n d t h e c o m p o n e n t of t a r g e t a c c e l e r a t i o n , with t h e a c c e l e r a t i o n p r o f i l e of MAMS r e p r e s e n t i n g t h e ideal s i t u a t i o n . Thus t h e i n t e g r a t e d s q u a r e a c c e l e r a t i o n is s m a l l e r in A P N c o m p a r e d t o PN. T h e p r e s e n c e of i n i t i a l h e a d i n g e r r o r m o d i f i e s t h e i n i t i a l p o r t i o n s of t h e a c c e l e r a t i o n profiles. 213 In P N and APN i t a d d s a positive a c c e l e r a t i o n initially, while in MAMS a positive initial pulsed a c c e l e r a t i o n is c a u s e d by HE. HE h o w e v e r h a s n o significant effect o n t h e miss d i s t a n c e , p a r t i c u l a r l y f o r l a t e m a n e u v e r initiations. (b) The m e a n a n d I C miss d i s t a n c e v a l u e s o b t a i n e d f o r P N , APN, a n d MAMS a r e r e c o r d e d in T a b l e s 1 a n d 2 f o r s h o r t a n d long r a n g e cases r e s p e c t i v e l y , with a heading e r r o r of 6". Even w h e n p e r f e c t i n f o r m a t i o n is a s s u m e d a b o u t t h e t a r g e t maneuver, t h e situation becomes stochastic d u e to t h e noisy dish r a t e s . F r o m b o t h t h e cases, it may b e observed t h a t t h e m a x i m u m v a l u e s of miss which o c c u r in P N f o r l a t e m a n e u v e r cases a r e significantly r e d u c e d in APN. F o r e a r l y m a n e u v e r s , t h e APN miss d i s t a n c e s t e n d t o b e l a r g e r t h a n in P N in t h e s h o r t r a n g e case. In t h e long r a n g e case, v e r y e a r l y i n i t i a t i o n of m a n e u v e r c a u s e s a l a r g e r miss t h a n in PN. This is because, t h e a b s e n c e of t h e t a r g e t a c c e l e r a t i o n t e r m in APN c a u s e s a n a b r u p t c h a n g e in ac w h e n t h e t a r g e t l e v e l s off f o r r e t r e a t . C o m p a r i s o n of t h e miss d i s t a n c e s in PN a n d APN f o r t h e d e t e r m i n i s t i c a n d s t o c h a s t i c cases r e v e a l s t h a t t h e y i n c r e a s e significantly - nearly by a f a c t o r of 4 - in t h e s t o c h a s t i c cases. C o m p a r i s o n is m a d e with MAMS only f o r t h e c r i t i c a l P N cases. T h e miss d i s t a n c e values shown f o r MAMS a r e only f o r t h e a s s u m e d m e a s u r e m e n t c o v a r i a n c e s . For t h e o t h e r cases, t h e miss d i s t a n c e s in MAMS a r e s m a l l e r t h a n t h e PN a n d APN values. (b) T h e miss d i s t a n c e s f o r t h e s e e n g a g e m e n t c o n d i t i o n s a r e a l s o shown in Figs 5 a n d 6. A s t u d y of t h e miss d i s t a n c e s for various tman r e v e a l s t h a t in PN, t h e miss d i s t a n c e is l a r g e f o r both s m a l l and l a r g e v a l u e s of t being v e r y s m a l l in b e t w e e n t h e s e v a ues. while Also, f o r excessively delayed maneuvers a n d for level f l i g h t conditions, t h e miss d i s t a n c e s a r e very small. APN a l s o shows a similar p e r f o r m a n c e b u t w i t h m a x i m u m v a l u e s of m i s s s m a l l e r t h a n t h o s e in PN. T h e miss d i s t a n c e s in MAMS could b e r e d u c e d t o s m a l l v a l u e s in a l l t h e cases, by p r o p e r l y tuning t h e p e r f o r m a n c e index w e i g h t s a n d s e l e c t i o n of r e f e r e n c e t r a j e c t o r y . Tan' Stochastic situation While considering t h e s t o c h a s t i c c a s e s , t h e r e s u l t s h a v e b e e n a v e r a g e d o v e r 50 m o n t e c a r l o runs. The point of m a n e u v e r d e t e c t i o n a n d t h e m a n e u v e r level vary f r o m r u n t o run. Mean a n d l a v a l u e s a r e shown in T a b l e s I a n d 2. I t is s e e n f r o m t h e individual r u n s t h a t t h e d e t e c i o n delay v a r i e s b e t w e e n 240 millisec and 500 millisec, t h e delay being l a r g e r f o r s m a l l m a n e u v e r levels. The a c c u r a c y of m a n e u v e r e s t i m a t i o n is o b s e r v e d t o b e b e t t e r t h a n 6% in a l l t h e s e runs, f o r t h e a s s u m e d m e a s u r e m e n t noise covariance. 8. Conclusions As f a r as t h e miss d i s t a n c e is c o n c e r n e d , t h e m a x i m u m v a l u e o b t a i n e d in APN is s m a l l e r t h a n in P N f o r t h e r a n g e of m a n e u v e r i n i t i a t i o n t i m e s investigated. T h e miss d i s t a n c e s in t h e L Q guidance s c h e m e c a n be made even smaller by proper s e l e c t i o n of p e r f o r m a n c e index weig h t s a n d t h e r e f e r e n c e nominal. (a) T h e a c c e l e r a t i o n profiles in PN, APN a n d MAMS h a v e t h e s a m e p a t t e r n as in t h e d e t e r m i n i s t i c cases, b u t now show e x c u r s i o n s a r o u n d t h e d e t e r m i n i s t i c values d u e t o t h e g l i n t noise a f f e c t i n g c o m m a n d e d a c c e l e r a t i o n . The m a g n i t u d e of t h e s e f l u c t u a t i o n s a r o u n d t h e d e t e r m i n i s t i c profile increases terminally, d u e t o t h e glint noise b e c o m i n g m o r e p r e d o m i n a n t t o w a r d s t h e e n d of t h e e n g a g e m e n t . In t h e d e t e r m i n i s t i c s t u d y , with t h e t a r g e t m a n e u v e r i n i t i a t i o n o c c u r i n g a t various points in t i m e , t h e P N a c c e l e r a t i o n p r o f i l e s exhibit l a r g e m a g n i t u d e e x c u r s i o n s of b o t h p o l a r i t i e s w h e r e a s in APN, t h e a c c e l e r a t i o n p r o f i l e r e s e m b l e s a pulse, with t h e pulse height being t h e m a x i m u m permissible a c c e l e r a t i o n . F u r t h e r m o r e , TABLE 1. MISS DISTANCE COMPARISON (SHORT RANGE CASE) HE = bo N' = 5 HISS DISTANCE VAIUES (met) L Q Guidance Scheme APN tman PN Perfect target information 0.0 2.7 ( 2 . 2 ) 3.90 ( 2 . 8 0 ) w i t h t a r g e t maneuver d e t e c t i o n anc estimatior (MAMS w i t h d e t e c t i on a n d e s t i m a t i o n ) 3.60 ( 2 . 7 ) 1 .o 2.4 ( 2 . 3 ) 3.60 ( 2 . 9 6 ) 3.70 ( 3 . 4 ) 2.0 2.6 ( 2 . 5 ) 5.40 ( 3 . 1 0 ) 3.10 ( 2 . 6 ) 2.5 10.9 ( 3 . 2 ) 3.60 ( 3 . 1 4 ) 5.40 ( 3 . 4 ) 3.0 13.7 ( 4 . 3 ) 4.00 ( 2 . 8 6 ) 4.90 ( 3 . 0 ) level 4.3 ( 1 . 7 ) 3.17 ( 2 . 5 0 ) 3.17 ( 2 . 5 ) 214 4.16 ( 2 . 0 7 ) TABIE 2 . MISS DISTAVCE COMPARISON (LONG EANGE CASE) HE = 6' N' = 5 MISS DISTANCE VALUES (met) I Q Guidance Scheme APN tinan PN Perfect t a r g e t information - with t a r g e t maneuver d e t e c t i o n and estimation ~~ 0.0 4.8 ( 3 . 8 ) 8.67 ( 4 . 8 0 ) 12.85 ( 7 . 3 ) 1 .o 9.9 ( 4 . 0 ) 4.40 ( 3 . 1 8 ) 5.43 ( 4 . 0 ) 2.0 6.8 ( 3 . 7 ) 3.60 ( 2 . 9 0 ) 4.28 ( 2 . 7 ) 5.0 2.8 ( 2 . 0 ) 3.50 ( 2 . 6 0 ) 3.10 ( 2 . 2 ) 7.0 16.1 ( 5 . 0 ) 3.70 ( 2 . 7 5 ) 7.30 ( 3 . 7 ) 7.5 18.3 ( 5 . 0 ) 6.83 ( 2 . 9 4 ) 4.62 ( 3 . 0 ) level 4.3 ( 2 . 8 ) 3.80 ( 2 . 5 0 ) 3.80 ( 2 . 5 ) 2.13 ( 2 . 6 8 ) G u i d a n c e and C o n t r o l Aug 1984, p p 78-98. t h e i n t e g r a t e d a c c e l e r a t i o n s q u a r e is m u c h smaller in APN. This APN a c c e l e r a t i o n profile very closely r e s e m b l e s t h e o n e o b t a i n e d f r o m t h e L Q t r a c k i n g f o r m u l a t i o n of g u i d a n c e problem. While t h e heading e r r o r modifies t h e initial accel e r a t i o n profile, i t h a s n o pronounced effect o n t h e miss distance. conference proceedings, 4. Rogers, R.M., 'Sensitivity of higher o r d e r g u i d a n c e law to p a r a m e t e r variations', IEEE NAECON Proceedings, 1982. 5. F i t z g e r a l d T.J., 'Shaping F i l t e r s f o r Dist r u b a n c e s with R a n d o m s t a r t i n g times', AIAA J. G u i d a n c e a n d C o n t r o l , Vol. 2, NO. 2, 1979, pp 152-154. The r e s u l t s establish t h a t t h e a c c e l e r a t i o n p r o f i l e s a r e q u a l i t a t i v e l y d i f f e r e n t under t h e t w o dimensional e n g a g e m e n t s c e n a r i o c o m p a r e d t o t h e o n e dimensional case p r e s e n t e d by Nesl i n e a n d Zarchan. While APN a n d L Q guidance s c h e m e s involve additional e f f o r t in e s t i m a t i n g t h e t a r g e t a c c e l e r a t i o n reasonably a c c u r a t e l y , t h e s m a l l e r i n t e g r a t e d a c c e l e r a t i o n c a n b e exploite d f o r r a n g e advantage. 6. S a r m a , I.G. a n d Swamy, K.N., 'MAMS: An a p p r o a c h t o O p t i m a l Terminal Homi n g G u i d a n c e f o r Aerial Engagement', AIAA Guidance, Navigation a n d C o n t r o l C o n f e r e n c e , Aug 1989 ( a c c e p t e d ) 7. Speyer, J.L. a n d David, G.H., 'Comparis o n of S e v e r a l E x t e n d e d K a l m a n F i l t e r F o r m u l a t i o n s f o r Homing Missile', AlAA Guidance and Control Conference Proceedings, 1980 pp 392-398. 9. References 1. P a s t r i c k , H.L., S e l t z e r , S.N. a n d Warren, M.E., ' G u i d a n c e L a w s f o r short-range t a c t i c a l missiles', AIAA J. G u i d a n c e and C o n t r o l , Vol 4, No.2,1981,pp 98-108. 2. Nesline, F.W. a n d look a t Classical Vs Guidance', AIAA J. VOI 4 No.1, 1981, p p (MAMS with d e t e c t i on and e s t i m a t i o n ) 8. Gonzalez, J.M., ' N e w Methods in t h e T e r m i n a l G u i d a n c e a n d C o n t r o l of T a c t i c a l M i ssiles' , IEE E NA E CON Proceedings 1979, p p 350-361. Z a r c h a n P., 'A new Modern Homing Missile Guidance and Control, 78-85. 9. Chan,Y.T.,Hu,A.G.C. a n d Plant,J.B.,'A K a l m a n F i l t e r b a s e d Tracking S c h e m e with input estimation.', IEEE T r a n s a c t i o n s o n AES vol. AES-15, M a r c h 1979, pp 237-44 3. Nesline F.W. a n d Z a r c h a n , P., 'Miss Dista n c e D y n a m i c s in Homing Missiles', AIAA 215