Proceedings of the Fifth Annual Symposium on Combinatorial Search
Multi-Agent Pathfinding with
Simultaneous Execution of Single-Agent Primitives
Qandeel Sajid
Ryan Luna
Kostas E. Bekris
University of Nevada, Reno
Reno, NV 89557 USA
sajid.qandeel@gmail.com
Rice University
Houston, TX 77005 USA
rluna@rice.edu
University of Nevada, Reno
Reno, NV 89557 USA
bekris@cse.unr.edu
Abstract
Multi-agent pathfinding is a challenging combinatorial problem that involves multiple agents moving on
a graph from a set of initial nodes to a set of desired
goals without inter-agent collisions. Searching the composite space of all agents has exponential complexity
and does not scale well. Decoupled methods are more
efficient but are generally incomplete. There are, however, polynomial time algorithms, which utilize single
or few-agents primitives with completeness guarantees.
One limitation of these alternatives is that the resulting
solution is sequential, where only one agent moves at a
time. Such solutions are of low quality when compared
to methods where multiple agents can move simultaneously. This work proposes an algorithm for multi-agent
pathfinding that utilizes similar single-agent primitives
but allows all agents to move in parallel. The paper describes the algorithm and its properties. Experimental
comparisons suggest that the resulting paths are considerably better than sequential ones, even after a postprocessing, parallelization step, as well as solutions returned by decoupled and coupled alternatives. The experiments also suggest good scalability and competitive
computational performance.
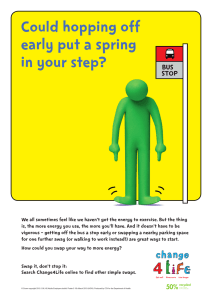
Figure 1: Agent 4 can move towards its goal while agents 2 and
3 change order locally so as to reach their goals. In a sequential
solution only one agent moves at a time.
sufficient for a solution, where n is the number of vertices
in the underlying graph [Kornhauser, Miller, and Spirakis
(1984)]. Recently, concrete sub-optimal, polynomial complexity algorithms have been proposed for computing the
actual path in important subcases of the general problem
[Khorshid, Holte, and Sturtevant (2011); Luna and Bekris
(2011)]. These methods employ single-agent primitives, or
more accurately primitives involving a small, constant number of agents. They return, however, sequential paths, where
only one agent moves at a time. Sequential solutions are
typically of low quality compared to those where multiple
agents move simultaneously.
This paper proposes an approach for computing a solution where agents can move simultaneously using similar
single-agent primitives. An example of these simultaneous
movements is depicted in Figure 1 in which agent 4 moves
towards its goal while agents 2 and 3 exchange positions.
Comparisons with recent pathfinding algorithms, including
both incomplete/decoupled and complete/coupled planners,
suggest that the proposed method scales as well as an established decoupled algorithm [Silver (2005); Sturtevant and
Buro (2006)], finds solutions as fast as a recent complete,
sequential algorithm [Luna and Bekris (2011)], and that
the quality of the solution is comparable to a recent anytime, optimal algorithm [Standley (2010); Standley and Korf
(2011)]. The proposed technique is shown to be effective not
only in large, sparse pathfinding contexts, but also in small,
highly constrained situations where even the best optimal
search algorithms often fail. The paper discusses the properties of the algorithm and argues that its completeness for
trees. The experiments include graphs with loops, on which
Introduction
Exciting applications in warehouse management, intelligent
transportation, robotics and computer games involve many
agents that must move from an initial to a goal set of locations in the same environment. This problem is often abstracted using a graph to represent the workspace where no
two agents can occupy a node or an edge simultaneously.
The problem has been shown to be NP-Complete [Ratner
and Warmuth (1986)] and searching the composite space
has exponential complexity in the number of agents. The
alternative is to apply a decoupled approach where individual paths are found first and intersections are resolved later.
While computationally efficient, this approach is generally
incomplete and fails in highly constrained challenges.
Alternative approaches, however, provide desirable properties. An early theoretical study refers to the problem as
the “pebble motion on a graph” and outlines a decision algorithm, which shows that in the worst case n3 moves are
c 2012, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
88
the proposed method is shown experimentally not to fail.
Related Work
Coupled methods consider the agents as a composite system
with high dimensionality and search the composite space
with complete, optimal planners (e.g., A* and variants [Hart,
Nilsson, and Raphael (1968); Korf (1985)]). Unfortunately,
the naive, coupled approach quickly becomes intractable due
to its exponential complexity. This led to techniques that
prune the search space while maintaining desirable properties. One recent technique searches for optimal paths in
an iterative deepening manner, showing that a breadth-first
search is feasible [Sharon et al. (2011)]. Another approach
modifies state expansion using operator decomposition and
segmenting instances into independent subproblems [Standley (2010); Standley and Korf (2011)]. There is also work
on minimizing the maximum dimension of independent subproblems [van den Berg et al. (2009)].
Certain complete alternatives cede optimality to achieve
computational efficiency. A study of the problem refers to
is as the “pebble motion on graphs”. It shows that a cubic number of moves as a function of the number of graph
vertices is sufficient and that the decision problem can be
solved in polynomial time [Kornhauser, Miller, and Spirakis (1984)]. Recent methods provide concrete algorithms
for finding paths for specific types of instances. For trees,
there is a linear time check for the solvability of an instance [Masehian and Nejad (2009)]. Based on this result, a
tree-based technique has been proposed that employs singleagent primitives [Khorshid, Holte, and Sturtevant (2011)].
Similar single-agent primitives have been employed by a
polynomial complexity method that is complete on general graphs with two more vertices than agents [Luna and
Bekris (2011)]. Another method considers the minimum
spanning tree of the graph and is complete if there are more
leaves in the tree than agents [Peasgood, Clark, and McPhee
(2008)]. There is also a complete approach specifically for
bi-connected graphs with two more vertices than agents
[Surynek (2009)]. For “slidable” grid-based problems, there
is a polynomial time solution [Wang and Botea (2011)]. Another method segments the graph into subgraphs by planning high-level operations between subgraphs to reduce the
branching factor [Ryan (2008)].
Decoupled techniques compute individual paths and resolve collisions as they arise. While faster, they are not
guaranteed to be optimal or complete. Certain methods are
based on heuristic search. One creates a flow network within
grid-worlds [Wang and Botea (2008); Jansen and Sturtevant
(2008)] and coordinates the actions where the flows intersect to reduce the number of paths and their intersections.
WHCA* [Silver (2005); Sturtevant and Buro (2006)] utilizes dynamic prioritization, windowed cooperative search
and a perfect single-agent heuristic to compute scalable solutions. Prioritized planners compute paths sequentially for
different agents in order of priority, where high priority
agents are moving obstacles for the lower priority ones [Erdmann and Lozano-Perez (1986)]. For trees, a hierarchical
prioritization-based planner exists to coordinate sequential
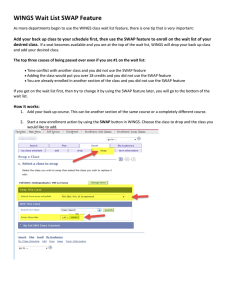
Figure 2: Nodes gA and gB are the goals for agents A and B. Left:
The start and goal of B are along the shortest path of A. Right: The
shortest path of each agent goes through the other’s assignment.
actions [Masehian and Nejad (2010)]. Other decoupled planners employ a plan-merging scheme to coordinate actions
and detect deadlocks [Saha and Isto (2006)].
Problem Setup
The proposed work borrows ideas from suboptimal, polynomial complexity methods that employ single-agent primitives to solve the multi-agent path-finding problem [Kornhauser, Miller, and Spirakis (1984); Luna and Bekris (2011);
Khorshid, Holte, and Sturtevant (2011)]. In contrast to these
methods, it achieves a solution where agents move in parallel. It specifically extends the path planning method, which
works for general graphs with at least two empty nodes
[Luna and Bekris (2011)]. In this context, there are two basic operations: (a) a “push” method that transfers individual agents towards their goals, while clearing the path from
other obstructing agents, and (b) a “swap” operation that
changes the order between two agents and allows progress
when the “push” operation fails.
Consider a graph G(V, E), where n = |V|, and k agents
R, where k ≤ n − 2. An assignment A : [1, k] → V places
the agents in unique vertices:
∀i, j ∈ [1, k], j 6= i : A[i] ∈ V, A[i] 6= A[j].
The starting assignment is denoted as SA, and the goal assignment is denoted as GA. A parallel action λ(Aa , Ab ) is
a change between two assignments Aa and Ab so that each
agent can move only between neighboring vertices in the
two assignments:
∀ i ∈ [1, k] : Aa [i] = Ab [i] or (Aa [i], Ab [i]) ∈ E.
A parallel path Π = {A0 , . . . , Aq } is a sequence of assignments, so that for any two consecutive assignments Ai and
Ai+1 in Π there is a parallel action λ(Ai , Ai+1 ). The objective is to compute a parallel solution Π∗ = {SA, . . . , GA},
which is a sequence initiated at SA and ending at GA.
The following notion is important for the description of
the algorithm. In particular, it describes when it is necessary
to employ the “swap” operation.
Definition (Dependency) A “dependency” between
agents A and B arises if (a) the start and goal nodes of B
are along the shortest path to the goal of A, or (b) the shortest path of each agent goes through the current node of the
other. Examples of situations where dependencies between
agents arise are shown in Figure 2.
An important intuition is that it is not necessary to reason
over all possible paths but only over shortest paths. If multiple shortest paths exist, then it is sufficient to reason about
89
Sets
R
P
U
S
I
C
M
H
T
Definition
All agents
Pushing agents
Agents at their goals
Agents involved in swaps
Vertices reserved for swap operations
One individual agent or composite agent
Agents that have moved in this iteration
Previous pushers in a recursive call
Vertices reserved by a specific swap group
Table 1: Definitions of commonly used sets in the algorithm.
one of them. Such dependencies can be resolved implicitly
during a “push” operation (agent A moves along a different
path). If a dependency between two neighboring agents cannot be resolved by “push”, then the “swap” operation will
exhaustively consider all possible ways to resolve it.
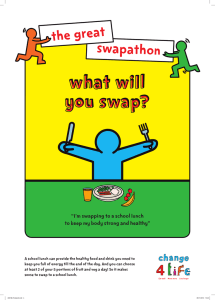
Figure 3: A solution of the simple “tree” benchmark using the proposed approach. Swap groups are shaded. (a-b)
Agents 1 and 2 push toward their goals and a dependency is
detected. (c-e) Agents 1 and 2 form a swap pair, and move to
a vertex of degree ≥ 3. Agent 3 reaches its goal. (f-i) Agent
1 swaps with agent 3 to reach its goal. Agent 2 reaches its
goal using PUSH. Details on how a swap between takes place
can be found in [Luna and Bekris (2011)].
Simultaneous Action Multi-Agent Pathfinding
At a high level, the proposed PARALLEL PUSH AND SWAP
method (Algorithm 1) operates by allowing agents to execute either a PUSH or a SWAP primitive to progress toward
its goal. All agents are grouped into one of two sets: (i) the
“pushing” agents P, which try to individually make progress
along their shortest paths, and (ii) the prioritized “swapping”
pairs S, which need to execute a swap action to remove a dependency between them. Initially all agents are in P. When
an agent reaches its goal, it is inserted into set U, indicating
it should not be disturbed by “pushers” P . The various sets
of agents used by the algorithm are defined in Table 1.
Algorithm 1 PARALLEL
PUSH AND SWAP
Swap Operation
When computing a solution for a pathfinding instance, it
is necessary to ensure that all inter-agent dependencies are
resolved. Agents that have a dependency cannot use PUSH
to reach their goal since their paths are diametrically opposed. SWAP (algorithm 2) explicitly removes a dependency
through a coordinated set of actions which results in the dependent agents exchanging vertices. There are three steps
required when swapping two agents: the agents must go to a
vertex with degree ≥ 3, evacuate two neighbors of this vertex, and then perform a primitive swapping operation.
Definition (Swap Vertex) A “swap vertex” is a vertex of
degree ≥ 3 used by a pair of agents for SWAP. A dependent
pair of agents reserves this vertex, preventing lower priority agents from occupying it. When an agent from the pair
reaches the swap vertex, its partner is presumed to occupy a
neighboring vertex, and the pair is said to occupy the swap
vertex. The “swap area” is a set of vertices that includes a
reserved swap vertex and its neighbors. Only higher priority agents may enter a swap area. A “swap group” refers to
all agents involved in a SWAP for a particular swapping pair
(i.e., additional agents occupying a “swap area”).
SWAP is a coordinated set of actions among agents in a
swap group, C, which requires several time steps to complete. Therefore, C can vary in size depending on the state of
the primitive. When SWAP is initially invoked, |C| = 2; the
set contains only the dependent pair of agents. In this case,
the agents are either using PUSH to reach their swap vertex
(line 2-3), or have just reached it and must begin freeing two
vertices in the swap area using CLEAR (line 5). If the swap
(R)
1: P ← R, U ← ∅, S ← ∅, I ← ∅
2: while |U| =
6 |R| do
3:
M←∅
4:
for all s ∈ S do
5:
if SWAP (s, M)==FAIL then return FAIL
6:
for all p ∈ P do
7:
H←∅
8:
PUSH (p, M, H, S, U, ∅, f alse)
9:
if p is at goal then U.insert(p)
10: return SUCCESS
PARALLEL PUSH AND SWAP iterates first over the swapping pairs S (line 4) and then the “pushers” P (line 6). SWAP
has higher priority, since its objective is to remove dependencies, which have been detected but not resolved by PUSH.
Each step of the algorithm maintains a set M, indicating
which agents have been scheduled to move during the last
iteration (line 3). This is needed as agents are trying to move
in parallel and they should not try to push another agent,
which has already been assigned an action for the current
step. If the overall problem has no solution, this will be detected by SWAP, which detects that a dependency cannot be
resolved (line 5). When all agents have reached their goals,
success is reported (line 10). A complete example of this
algorithm is shown in Figure 3.
90
area has two empty vertices, the pair of agents will exchange
vertices using SWAP PRIMITIVE (line 6), at which time the
dependency is resolved and the pair is re-inserted into P. If
CLEAR is unsuccessful, SWAP will assign a new swap vertex
if C has the highest priority (line 8), otherwise SWAP will be
invoked again at the same swap vertex. If the highest priority
pair exhausts all vertices of degree ≥ 3, a swap is not possible between the dependent agents and there is no solution
for this instance (lines 7-8). The process of freeing two vertices in the swap area may span several time steps, during
which SWAP will be invoked for |C| > 2 (lines 9-18), and
the swap group will be coordinating their actions to free the
swap area.
the vertex is reached (lines 15-18). When this motion is finished the swapping pair can move back to the swap vertex
(lines 10-14), at which time CLEAR is successful.
Push Operation
PUSH attempts to move an agent, or a composite agent C,
one vertex along a specific path. The order of the agents
executing PUSH determines which can be “pushed” away
from their current position to accommodate the motion of
“pushers”. PUSH entails two steps: (a) computing a path for
the pushing agent(s) that respects the priorities of all other
agents, and then(b) attempting to make progress along this
path. Under certain condition, PUSH can change the set that
an agent belongs to. If an agent C in P cannot push along
its shortest path, then PUSH creates a swapping pair out of C
and the agent currently blocking its movement and adds the
pair into S as the lowest priority pair. If instead the pushing
agent C already belongs to S (PUSH is invoked by SWAP) and
it must push one or more members of a lower priority pair in
S, the lower priority group is dissolved and reinserted into
P. PUSH is detailed in algorithm 3.
Algorithm 2 SWAP (C, M)
1: if |C| == 2 then
2:
if C not on swap vertex with degree ≥ 3 then
3:
PUSH (C, M, ∅, S, U, ∅, true)
4:
else
5:
attempt=CLEAR(C, M, C.swapV ert.)
6:
if attempt==SUCCESS then SWAP PRIMITIVE (C)
7:
else if attempt==FAIL then
8:
return FIND NEW VERTEX(C)
9: else
10:
a ← C.end()
11:
attempt=PUSH(a, M, ∅, S, U, C.area, true)
12:
if attempt==FAIL then
13:
C ← C.pop()
14:
return FIND NEW VERTEX(C)
15:
else if attempt==SUCCESS then
16:
if a is at tempGoal then
17:
erase a.tempGoal, C ← C.pop()
18:
else PUSH(C \ a, M, ∅, S, U, ∅, true)
19: return SUCCESS
Algorithm 3 PUSH (C, M, H, S, U, T , swap)
1:
2:
3:
4:
5:
6:
7:
8:
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
During the CLEAR phase, agents occupying the swap area
are included in the swap group (|C| > 2). This formulation allows the status of the swap to be implicitly encoded
across several time steps. Due to space constraints a formal
algorithm for CLEAR is not provided, but a brief description
follows. If there are two empty vertices in the swap area,
CLEAR is trivially successful. Otherwise there are agents
occupying the neighborhood of the swap vertex. There are
two methods to move these agents: The first uses PUSH to
move these agents to any vertex away from the swap area. If
this PUSH frees two vertices then CLEAR succeeds. On the
other hand, if after this step there are no empty vertices in
the swap area, CLEAR fails. For the case when there is a single empty vertex in the swap area, a second phase for CLEAR
is attempted in which PUSH is used to move an agent in the
swap area through the empty vertex via the swap vertex and
out of the swap area. To perform this step, it is necessary
to move the swapping pair away from the swap vertex first,
then the occupying agent can move to the free neighbor. At
the formerly empty vertex, the occupying agent can check
whether it is possible to push to a vertex immediately outside the swap area using FEASIBLE. If this motion is valid,
the outside vertex becomes the agent’s temporary goal until
if C ∈ H then return FAIL
if (C ∈ U and swap==false) or C ∈ M then
return PAUSE
U =U \C
if C has temporary goal then
π= SHORTEST PATH (C, C.tempGoal, ∅)
else
π=SHORTEST PATH (C, C.goal, H|H|−1 ∪ T )
if FEASIBLE(C, π, M, H, S, T , I, swap)==FAIL then
while π= ∅, cn ∈ H do
π=SHORTEST PATH (C, cn .goal, H|H|−1 ∪ T )
if FEASIBLE(C, π, M, H, S, T , I, swap)==FAIL then
Y = closest empty vertices(C)
e: argminy∈Y (shortest distance to C.goal)
π=SHORTEST PATH (C, e, H|H|−1 ∪ T )
attempt = FEASIBLE(C, π, M, H, S, T , I, swap)
if attempt== SUCCESS then
move C one vertex along π, M ← M ∪ {C}
return attempt
PUSH employs the following parameters. C is the set of
agents executing the push. Typically, |C| = 1. Nevertheless,
SWAP can also invoke PUSH for a pair of agents, in which
case |C| = 2. In that case, the input parameter swap is set
to TRUE and the parameter T corresponds to the vertices reserved for swapping agents in C (T ⊂ I). Otherwise, swap
is f alse and T = ∅. PUSH operates in a recursive manner,
checking the feasibility of movement for each agent individually. Each agent processed is inserted into the set H.
PUSH begins by verifying that a push is indeed valid by
first checking that C is not pushing itself recursively, that is
has not already made an action this round, or that it is already at its goal and not involved in swap (C ∈
/ H, C ∈
/ M,
C ∈ U respectively). If any of these conditions is true, the
push does not proceed (lines 1-3). PAUSE indicates that the
91
push does not fail, but cannot proceed during this step. It can
also happen that an agent is displaced from its goal during
SWAP . PUSH removes C from U before checking any action
to ensure that an agent previously pushed from its goal by
other agents (likely due to a swap) will return to its goal
(line 4). Presuming these checks succeed, PUSH then computes the path π that C will move along (lines 5-15). For the
special case that C is assigned a temporary goal (i.e., during
SWAP when moving to the swap vertex or for agents clearing a swap area), the shortest path, ignoring the positions of
all other agents is computed (lines 5-6). Otherwise, there are
three paths to consider for a push, all of which must avoid
agents already involved in this push (the set H): the shortest
path to the goal of C (“optimistic”), the shortest path to the
goal of an agent already pushing C (“go with the flow”), and
the path to the closest empty vertex (“likely to succeed”).
With each push the motivation is to move the agent closer to
its goal either directly by finding a path to the goal or indirectly by finding a path to a location close to the goal when
the direct path to the goal cannot be found. As a last resort
when a path to the first two option cannot be found, the agent
is pushed out of the way to the closest empty. PUSH uses an
auxiliary method, FEASIBLE (algorithm 4), to verify feasibility of each path (and recursively call PUSH if necessary),
which is described later. When the first feasible path is discovered, C is moved one step along this path and success is
returned (lines 17-18). If no valid path is found for C, the
last computed value of FEASIBLE is returned (line 19).
move into a vertex already reserved by an agent for the next
time step (lines 3-4). If v belongs to another agent’s “swap
area”, the priorities between the C and the swap group using
v is compared in CHECK PRIORITY. If the C has higher priority the other group is dissolved and the agents are pushed
back into P; otherwise, C just waits for the other group to
finish (lines 5-8, 19-22). Also, an agent cannot push into its
own “swap area”. This case arises when clearing agents during SWAP (line 9). At this point, if v is free, it is safe to move
to it (line 23). This leaves just one last case: v is occupied,
and C ∈ P (lines 10-18). It is possible now to detect whether
a SWAP is necessary between C and the agent occupying v by
checking whether a dependency between these two agents
exists using DEPEND. Recall that a dependency between two
agents occurs when an agent must move through the start
and goal of another agent, or two agents have diametrically
opposing shortest paths. If these agents are dependent, FEA SIBLE forms a swap group with these two agents, and assigns the new group a swap vertex (lines 15-17). Since a
SWAP is required between these two agents, any attempt to
PUSH C along the path will fail (line 18). If the agents are
not dependent, the success of FEASIBLE depends on whether
it is possible to move the agent occupying v in a recursive
PUSH (line 24). C is appended to the set H, indicating to the
agent of the recursive PUSH that C is pushing it.
Analysis
This section argues the completeness of the PARAL LEL PUSH AND SWAP for trees when |R| ≤ n − 2 and
|V | = n.
Lemma 1: If the agents being pushed have no “dependency”, the FEASIBLE will not form any new dependencies.
Push does not change the “order” of agents.
FEASIBLE moves agents in three ways. Agents will first
try to push along the shortest path to their goal. In this case,
no dependency is introduced between an agent and its pushers as they will remain in the same order relative to their
goals. If that fails, or the agent is already at its goal, then
it pushes towards its pushers’ goal. Then the agent and its
pushers are pushed in a chain towards the original pusher’s
goal and no new dependency arises. In the last case, an agent
may need to move towards the empty vertex closest to its
goal. This also does not introduce any new dependency because in this case the pushers will also follow the same path.
Lemma 2: Only necessary swaps are detected by the algorithm. The swaps will be resolved if the problem is solvable.
If there is a dependency between two agents, it will be
detected by FEASIBLE. FEASIBLE checks for both types of
dependencies between a pusher and a pushee. Nevertheless,
on graphs that contain loops and if only the shortest paths of
agents are considered, then false dependencies may be detected depending on the position of agents along the loop.
To prevent false positives, the dependency between a pair
of agents involved will be also checked at a vertex of degree ≥ 3 (an example of a false positive is shown in Figure 4). If the dependency remains, the swap is necessary. If
there is a dependency involving multiple agents, (e.g., agent
a1 dependence on its successor and their is a dependency
Algorithm 4 FEASIBLE (C, π, M, H, S, T , I, swap)
1:
2:
3:
4:
5:
6:
7:
8:
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
20:
21:
22:
23:
24:
if π== ∅ then return FAIL
v ← π.pop()
if v is reserved by m ∈ M then
return PAUSE
else if v ∈ I then
if (swap == f alse) then return PAUSE
if CHECK PRIORITY(C, group using v)==FAIL then
return FAIL
else if T 6= ∅ then return FAIL
else if agent (a) is on v and swap == f alse then
if a ∈ S then return FAIL
π= SHORTEST PATH (C, C.goal, ∅)
π’ = SHORTEST PATH (a, a.goal, ∅)
ESV ← {vert. of degree ≥ 3, sorted by dist. from C}
if DEPEND(C, a, π, π’, ESV.pop())==TRUE then
SETUP SWAP (C, a, ESV.pop())
S ← S ∪ {C, a}
return FAIL
else if (agent (a) is on v and swap == true) then
if a ∈ S then
if CHECK PRIORITY(C, group of a)==FAIL then
return FAIL
else if (v is free) then return SUCCESS
return PUSH(a, M, H ∪ C, S, U, T , swap)
FEASIBLE validates a path computed by PUSH , and determines whether it is possible for C to move along π to vertex
v during the next time step. It isn’t possible for an agent to
92
r makes progress towards its goal.
Based on Lemmas 1 and 2, FEASIBLE will only move
agents in a way that unnecessary swaps will not occur. If
a necessary swap is needed, it will be detected and resolved.
According to Lemma 3, the same pair will not be swapped
more than a finite number of times. Each swap removes a dependency between agents. At some point all agents will be
independent of one another. Without any dependencies, all
agents will reach their goal by using FEASIBLE. In this way,
the PARALLEL PUSH AND SWAP algorithm guarantees that
every agent will be brought to its goal. The displacement of
an agent from its goals, either for a push or swap operation,
will not prevent the agent from returning back to it.
PARALLEL PUSH AND SWAP is able to solve all cases on
trees with |R| ≤ n − 2 agents. It can solve trees with |R| ≤
n − 1 agents when no swap is required.
Figure 4: False positives can occur when two agents are in
the correct order but find shortest paths in the opposite direction of each other due to being equidistant from their
goals. In the figure, agents A and B have a dependency due
to crossing paths but it is found to be a false positive when
checked at a vertex of degree ≥ 3. Note that the agents are
not actually moved to that vertex but their dependency is
checked as if they had in their current order.
Evaluation
on successors until ak which depends on a1 ), then PAR ALLEL PUSH AND SWAP will also detect this dependency.
This is discovered by FEASIBLE, which is able to identify
that an agent being pushed is in the list of pushers H. In this
case, FAIL is returned, which causes the agent to look for an
alternative direction, such as push towards an empty vertex.
If the problem is solvable, the swap pair with the highest
priority will move to a vertex of degree ≥ 3. Eventually all
swap pairs will acquire the highest priority. Even if a swap
pair is dissolved, the algorithm will be able to recreate it
later. CLEAR will exhaust all possible ways to free two adjacent vertices in a specific vertex of degree ≥ 3. If CLEAR
fails for this vertex, it will exhaustively consider all vertices.
Lemma 3: Pairs of agents will swap at most once on trees.
Swap pairs are formed when there is a dependency between two agents that needs to be resolved. In a graph with
a loop it is possible that once a dependency between a pair
(a,b) is resolved, that a will swap with most of the other
agents in the loop, while b swaps with the rest. This will
cause an implicit swap between a and b, recreating the dependency between them once again. In a tree, no implicit
swap can arise and agents will swap at most once. The experimental results suggest that the number of implicit swaps
occurring between pairs of agents is bounded (e.g., on problems of the form shown in Figure 5). Future work will aim
to show that the number of swaps is finite for general graphs
with loops.
Theorem: All trees with |R| ≤ n − 2 and |V | =
n that can be solved will be solved through PARAL LEL PUSH AND SWAP .
Proof: For the top pushing agent r, the algorithm will
attempt to move it to its goal, pushing along the way other
agents closer to their goals, or r’s goal, or to an empty vertex
closest to their goal. This will allow r to push any agent other
than those involved in swap. If a dependency is found, then a
swap is necessary. The pair with the dependency will move
to the vertex, clear two neighboring vertices, and continue
to switch positions. Because the swap primitive requires at
least two empty vertices, it is necessary that |R| ≤ n − 2
and |V | = n. Otherwise, the problem cannot be solved with
PARALLEL PUSH AND SWAP . If a dependency is not found,
The proposed method is compared against the following:
1. The sequential equivalent [Luna and Bekris (2011)],
which returns solutions where one agent moves at a time.
2. A “parallelized” version of the output returned by
method 1 above, where a post-processing step removes
states when agents remain in the same vertex. The removal is
accepted if the solution is still valid (i.e., no inter-agent collisions). The search repeats until no possible states can be
removed from the solution without invalidating it. A scalable and optimal method for parallelization is not known
[Surynek (2009)]. Greedy methods could also be employed,
but the path quality is poor in comparison.
3. The WHCA* approach [Silver (2005); Sturtevant and
Buro (2006)], which is a decoupled planner that uses windowed cooperative search and dynamic prioritization. For all
tests, WHCA* had a timeout of 10 minutes since typically
when it finds a solution, it does so rather quickly.
4. The ODA* Standley (2010); Standley and Korf (2011),
an A*-based solution with operator decomposition, which
splits the state expansion step of a classical A* search into
a series of “operators”, one for each agent. A state is not
advanced until each agent is assigned a valid operator. This
method bring the branching factor down to a constant factor, while increasing the depth of the solution by an amount
linear in the number of agents. ODA* had a timeout of 1
minute due to its significant memory requirements.
The algorithms are tested on cooperative pathfinding
problems, ranging from small benchmarks, where all agents
share pair-wise dependencies, to larger scale problems. All
experiments were executed on an Intel Core i5 2.66Ghz with
4GB of memory. These algorithms were evaluated based on
path quality, computation time, and success rates.
Small-size Benchmark Problems The benchmarks used
here are those from the sequential work on Push and Swap
[Luna and Bekris (2011)] plus the two loop problem shown
in Figure 5. These benchmarks involve anywhere between 3
to 16 agents.
Computation Time:
The solutions returned from
all five techniques are shown in Table 2. PARAL LEL PUSH AND SWAP takes more time than the sequential
93
Problems
Tree
Corners
Tunnel
Connect
String
Two Loop
Time
1.04
2.64
9.53
7.70
2.38
4527
Parallel PS
Steps
9
21
44
37
15
1015
Success
100%
100%
100%
100%
100%
100%
Time
0.60
1.33
1.62
3.10
0.53
77.4
Sequential PS
Steps
Success
39
100%
68
100%
159
100%
126
100%
39
100%
5269
100%
Sequential PS w/Parallelization
Time
Steps
Success
3.97
20
100%
29.2
27
100%
1574
49
100%
1167
29
100%
8.56
23
100%
–
–
0%
Time
0.43
0.47
–
–
0.73
–
WHCA* (5)
Steps
Success
16.1
36.1%
10.2
11.1%
–
0%
–
0%
14
62.7%
–
0%
Time
2.17
16.10
184
–
.45
–
ODA*
Steps
6
8
6
–
8
–
Success
100%
100%
100%
0%
100%
0%
Table 2: Computation time (ms), solution length (# of steps) and success rates for benchmarks. WHCA* and ODA* do not
always return. Averages shown over twenty repetitions per case. Bold values are the best results in terms of time and steps taken
for each case.
Large Scale Problems This paper considers two types
of scalable problem instances: “loop” and “random” problems. Experiments were also run on “Moving AI” benchmark maps [Sturtevant (2012)].
Loop Problems: n-2 agents are placed in a loop-like
graph with n nodes. An example is provided in Figure 6. This problem is challenging, as all the agents
share pairwise dependencies. Two techniques are evaluated:
PARALLEL PUSH AND SWAP and the sequential method.
WHCA* and ODA* were unable to compute solutions for
any instance of this family of problems. The parallelization of the sequential solution was significantly slower
than the time it took to compute solutions with PARAL LEL PUSH AND SWAP . PARALLEL PUSH AND SWAP is capable of producing increasingly better solutions especially
as the number of agents in the loop increases.
Random Problems: These involve a 20x30 grid map
where 20% of cells are obstacles. This map is populated with 5-100 agents (in increments of 5) with 100
random start and goal configurations for each number of
agents creating a total of 2000 tests for each algorithm.
Figure 7(left) shows that as the problem size increases,
the time PARALLEL PUSH AND SWAP takes in comparison to Push and Swap decreases. ODA* takes much more
time than the PARALLEL PUSH AND SWAP but is significantly better than WHCA* with window size 20. WHCA*
with window size 10 approaches the efficiency of PAR ALLEL PUSH AND SWAP but as the number of agents increases, its success ratio drops. ODA* computes better
paths at a significantly higher computation cost and with
lower success rate. As in Figure 7 (middle), the number of
steps computed by PARALLEL PUSH AND SWAP is noticeably lower than that computed by the sequential Push and
Swap. WHCA* computes solutions similar in size to that of
PARALLEL PUSH AND SWAP but its success rate drops fast.
PARALLEL PUSH AND SWAP computes better solutions at
competitive times and with 100% success rate.
“Moving AI” Map: A hundred start/goal location pairs
were generated on the arena map from the game Dragon
Age [Sturtevant (2012)]. The number of agents is increased
by fifty until there are two hundred agents. As shown in
Figure 8(left), WHCA* takes too much time to be visible
in the graph. ODA* was unsuccessful on these maps (Figure 8(right)). PARALLEL PUSH AND SWAP took less steps
to solve the problem than WHCA* (both window sizes) and
the sequential Push and Swap (Figure 8(middle)). As shown
in Figure 8(right), PARALLEL PUSH AND SWAP has a consistent success ratio of 100%, while the rates for WHCA*
Figure 5: Two loop problem.
Figure 6: A difficult problem where agents must rotate
around a loop to get to their goal. A swap can take place
only at one vertex. The graph shows the length of the solution for the sequential and parallel algorithms as the loop
grows in a logarithmic scale.
Push and Swap, as well as WHCA* (with window size of 5)
for these small scale problems. Note, however, that WHCA*
is incomplete and does not always return a solution. Furthermore, the PARALLEL PUSH AND SWAP approach is able to
always compute solutions faster than the sequential algorithm with the parallelization step and ODA*.
Solution Length: The number of steps taken by PAR ALLEL PUSH AND SWAP , is smaller than the sequential
Push and Swap which often requires more than two
times the number of steps. The path found by parallelizing the sequential solution still did worse than PAR ALLEL PUSH AND SWAP . Although WHCA* produces a
competitive solution for corners, its success rate is low.
Anytime-ODA* finds the optimal solution for three of the
maps, but it requires considerably more computation time. It
also failed to find the solution in some maps. Overall, PAR ALLEL PUSH AND SWAP produces better solutions than alternatives with competitive times.
94
Figure 7: (left) Computation time. (middle) Solution length (including number of edges traversed by Sequential Push and
Swap). (right) Success ratio. 20x30 grid-world with 4-connectivity and 20% obstacle density.
Figure 8: (left) Computation time. (middle) Solution length (including number of edges traversed by Sequential Push and
Swap). (right) Success ratio. The algorithms were executed on the “Moving AI” arena map. ODA* always failed. Computation
time taken by WHCA* (20) and the number of edges for Sequential Push and Swap were too high to be shown.
References
and ODA* drop quickly.
Erdmann, M., and Lozano-Perez, T. 1986. On Multiple Moving
Objects. In ICRA, 1419–1424.
Discussion
This work presents an algorithm for multi-agent pathfinding
with simultaneous actions. Related work utilizing similar
primitives returned only sequential solutions. Experimental
comparisons show the advantages of the approach both on
tightly constrained instances, as well as larger, more general scenarios. Solution lengths for the proposed method are
competitive with anytime complete approaches, and significantly better than sequential solutions. The time needed to
compute these solutions is also competitive. The proposed
method never failed in the tested environments.
It is interesting to investigate optimal algorithms using the
same set of primitives, although this is expected to lead to an
exponential complexity result. The agent ordering, and the
priorities assigned by the algorithm affect computation time
and solution quality, and it may prove useful to select them
in a more informed manner. Another extension involves relaxing the restriction requiring two empty vertices in the input graph to guarantee completeness.
Hart, E. E.; Nilsson, N. J.; and Raphael, B. 1968. A formal basis for the heuristic determination of minimum cost paths. IEEE
Transactions on Systems Science and Cybernetics 2:100–107.
Jansen, M. R., and Sturtevant, N. 2008. Direction Maps for Cooperative Pathfinding. In AIIDE.
Khorshid, M. M.; Holte, R. C.; and Sturtevant, N.
2011.
A Polynomial-Time Algorithm for Non-Optimal Multi-Agent
Pathfinding. In SOCS, 76–83.
Korf, R. E. 1985. Depth-first iterative-deepening: An optimal admissible tree search. Artificial Intelligence 27:97–109.
Kornhauser, D.; Miller, G.; and Spirakis, P. 1984. Coordinating
pebble motion on graphs, the diameter of permutation groups and
applications. In FOCS, 241–250.
Luna, R., and Bekris, K. E. 2011. Push and Swap: Fast Cooperative
Path-Finding with Completeness Guarantees. In IJCAI.
Masehian, E., and Nejad, A. H. 2009. Solvability of Multi Robot
Motion Planning Problems on Trees. In IROS, 5936–5941.
Acknowledgments: The work of Q. Sajid and K. Bekris is supported by NSF CNS 0932423. Q. Sajid was also supported by NV
NASA EPSCOR. The work of R. Luna is supported by NSF IIS
0713623. Any opinions expressed in this paper are those of the authors and do not necessarily reflect the views of the sponsors.
Masehian, E., and Nejad, A. H. 2010. A Hierarchical Decoupled
Approach for Multi Robot Motion Planning on Trees. In ICRA,
3604 – 3609.
95
Peasgood, M.; Clark, C.; and McPhee, J. 2008. A Complete
and Scalable Strategy for Coordinating Multiple Robots within
Roadmaps. IEEE Transactions on Robotics 24(2):282–292.
Ratner, D., and Warmuth, M. K. 1986. Finding a shortest solution for the n x n extension of the 15-puzzle is intractable. In
The Fifth National Conference on Artificial Intelligence (AAAI’86),
168–172.
Ryan, M. R. K. 2008. Exploiting Subgraph Structure in MultiRobot Path Planning. Journal of AI Research 31:497–542.
Saha, M., and Isto, P. 2006. Multi-Robot Motion Planning by
Incremental Coordination. In IROS, 5960–5963.
Sharon, G.; Stern, R.; Goldenberg, M.; and Felner, A. 2011. The
Increasing Cost Tree Search for Optimal Multi-Agent Pathfinding.
In IJCAI, 662–667.
Silver, D. 2005. Cooperative Pathfinding. In AIIDE, 23–28.
Standley, T., and Korf, R. 2011. Complete Algorithms for Cooperative Pathnding Problems. In IJCAI, 668–673.
Standley, T. 2010. Finding Optimal Solutions to Cooperative
Pathfinding Problems. In AAAI, 173–178.
Sturtevant, N., and Buro, M. 2006. Improving Collaborative
Pathfinding Using Map Abstraction. In AIIDE, 80–85.
Sturtevant, N. 2012. Benchmarks for grid-based pathfinding.
Transactions on Computational Intelligence and AI in Games.
Surynek, P. 2009. A Novel Approach to Path Planning for Multiple
Robots in Bi-connected Graphs. In ICRA, 3613–3619.
van den Berg, J.; Snoeyink, J.; Lin, M.; and Manocha, D. 2009.
Centralized path planning for multiple robots: Optimal decoupling
into sequential plans. In Robotics: Science and Systems.
Wang, K.-H. C., and Botea, A. 2008. Fast and Memory-Efficient
Multi-Agent Pathfinding. In ICAPS, 380–387.
Wang, K.-H. C., and Botea, A. 2011. MAPP: A Scalable MultiAgent Path Planning Algorithm with Tractability and Completeness Guarantees. Journal of AI Research 42:55–90.
96