al Pu Proporti on Navigation
advertisement

I.
Pure Proportional Navigation
Against Time-Varying Target
Maneuvers
S. N. GHAWGHAWE
D. GHOSE
Indian Institute of Science
Capturability of the pure proportional navigation (PPN)
guidance law against a target executing bounded piecewise
continuous time-varying maneuvers is investigated. A qualitative
analysis is carried out to obtain a set of sufficient conditions
for capture defined on the engagement parameters and initial
conditions. These conditions are significantly less restrictive than
the ones obtained previously by others using the Liapunov method.
It is shown that the actual capture region for time-varying target
maneuvers, obtained by using the conditions derived in this work,
is much larger than that obtained from the Liapunov technique.
We also show that though a bounded time-varying target maneuver
does change the constant target maneuver capture region to
some extent, it does not reduce it drastically Further, we show
that the worst case capture region is obtained when the target
executes a constant maneuver equal to the bound on the maneuver
level. Some bounds on the missile lateral acceleration are also
obtained for certain regions in the engagement plane. These
results are generalizations and extensions of existing results on the
capturability of the P P N guidance law against targets executing
constant or time-varying target maneuvers.
Manuscript received July 20, 1994; revised April 25, 1995.
IEEE L o g No. T-AESn2/4/08002.
Authors’ current addresses: S. N. Ghawghawe, Siemens Information
Systems, 651, C . V. Naidu Chamber, K. P. R.Road, Jaynagar,
Bangalore 560 082, India; D. Ghose, Department of Aerospace
Engineering, Indian Institute of Science, Bangalore 560 012, India.
0018-9251/96/$5,00 @ I996 IEEE
1336
INTRODUCTION
Proportional navigation (PN) and its variants are
some of the most widely researched missile guidance
laws in the literature [l-31. These guidance laws are
easy to implement and have shown good performance
against nonmaneuvering and moderately maneuvering
targets. For highly maneuvering targets the PN law has
been extended to yield the augmented proportional
navigation (APN) law [4] and guidance laws based on
optimal control theory [2] and differential games [5].
Though these modern guidance laws have been derived
using a rigorous mathematical theory, their underlying
philosophy remains the same as that of PN.
Early research on PN guidance law concentrated
mainly on the analysis of a linearized version of the
engagement geometry [6]. Guelman [7] was the first
to consider the exact nonlinear equations of motion
with the missile using the pure proportional navigation
(PPN) guidance law in which the missile latax is
applied in a direction normal to the missile velocity
vector. It was shown through a qualitative analysis
that for a nonmaneuvering target, under reasonable
assumptions on the missile capability, the missile can
capture the target from almost all initial conditions.
Subsequently, a similar qualitative analysis by Guelman
[8, 91 led to the set of sufficient conditions for which
the missile can capture a target executing a constant
maneuver. Subsequently, a closed-form solution to the
equations of motion for a nonmaneuvering target was
obtained by Becker [lo]. For maneuvering targets no
such closed-form solution is available to date.
Though in [S, 91 the target was assumed to execute
a constant maneuver, in reality this need not be, and
is usually not, the case since the target (normally a
piloted aircraft) is capable of changing its maneuver
level within certain bounds. In fact, actual avoidance
and escape maneuvers executed by fighter aircraft
involves a combination of sharp turns and straight
dashes which are executed by switching between
positive, zero, and negative lateral accelerations. This
kind of time-varying target maneuver was considered
by Ha, et al. [ll] for a planar engagement and by Song
and Ha [12] for a 3-dimensional engagement geometry,
using the Liapunov function technique. Although they
were able to obtain certain sufficient conditions of
capture, it turns out that these conditions are quite
inadequate in the sense that they demarcate a very
small portion of the actual capture region in the initial
condition space. In the present paper we obtain far
more representative conditions for capture which can
demarcate almost the whole of the capture region
for targets executing time-varying target maneuvers.
The technique used is an extension of the qualitative
analysis approach used by Guelman [8].
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 32. NO. 4 OCTOBER 1996
II.
PROBLEM FORMULATION AND MOTIVATION
A.
Engagement Model
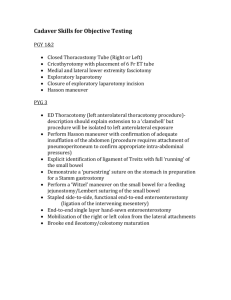
The planar engagement geometry is described using
point mass models of the target T and the missile M
(see Fig. 1). The coordinate system is centered on the
target, with Tx as the direction of the initial target
The target is assumed to maneuver only
velocity VTO.
laterally. The autopilot and seeker response is assumed
to be instantaneous and the missile angle of attack
is assumed to be negligibly small. The velocities VM
and VT of the missile and the target are constants
throughout the engagement. The target is assumed to
execute piecewise continuous time-varying maneuvers
with specified bounds on the maneuver level, i.e., for
all t ,
IAT(t)I 5 ATmax.
(1)
tY
Fig. 1. Missile target engagement geometry.
where,
The equations of motion are
V8
= re = V, sina
+ vTsin(6 - p),
(10)
(2)
%(0) = v 8 0 ,
6(O) = OO
(4)
. AM
y = -,
VM
y(0) = "lo.
Here, r , 6 , p , a , y , A ~ ,are
A ~all time-varying
quantities. The argument t is written explicitly in AT(^)
to stress the fact that unlike the assumption of constant
target maneuver level in [S, 91 here we assume the
target latax to be a time-varying quantity rather than a
constant. Further, Vr and Ve are the relative velocities
of the target with respect to the missile along the line
of sight (LOS) and normal to the LOS, respectively.
The closing velocity is given by
v,= -v,= - r.
(6)
When the missile is guided by the PPN guidance law,
we have
AM = NV,e
(7)
Here, AT(^) is the average maneuver level (latax)
of the target over the time period 0 to t and 2 " ~
is the mean rate of change of the target orientation
(or the mean turn rate of the target) over the time
period 0 to t. Obviously, because of (l), lA~(t)l
5
AT,,,^^ automatically holds. Note that when the target
maneuver level is constant, i.e., A r ( t ) = AT for all t ,
then j l ~ ( t=) AT and & ~ ( t =
) AT/VTfor all t. This is
the case considered by Guelman [S]. For time-varying
target maneuvers both AT and A v are
~ functions
of time, but for the sake of simplicity we drop the
argument t in the subsequent analysis.
Substituting (7) in (5), integrating the resulting
equation, and then using the relation Q = y - 6 2a,
(2) and (3) can be rewritten as
+
v,(e,t)= vMsin(k6 - $o) + VTsin(6 - AvTt) (11)
v,(e,t)= V, cos(k6 - $o) - vTcos(e - AvTt)
(12)
with
get,
$0
= k6o - ao. Normalizing with respect to VT,we
v8T
Ve
= - = vsin(k6 - $0)
VT
vr = L/cos(ktlV,T = VT
where, N is the navigation constant. Define
Integrating (4), we get the net angular excursion of the
target in the time period 0 to t as
$0)
+ sin(6 - ; I u T t )
(13)
- C O S (-~A,=t).
(14)
These are the fundamental equations on which a
qualitative analysis is performed.
6. Capturability of PPN Guidance Law
(9)
Capturability of a guidance law is defined as
its ability to ensure capture or intercept of a target
GHAWGHAWE & GHOSE: PURE PROPORTIONAL NAVIGATION AGAINST TIME-VARYING TARGET MANEUVERS
1337
Conslonl
IGuslmanI
..
. .
..
0.5
. .
I
_2JT3_
__
3
2n
0
n
a.
V
0
(b)
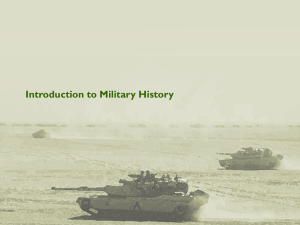
Fig. 2. Comparison of guaranteed capture regions. (a) N = 4,
v, = 500 m/s, V, = 350 m/s, 00 = 210°,
= 25 m/s2.
(b) N = 5, V, = 600 m/s, VT = 300 m/s, 00 = 150°,
Armax= 25 m/s2.
by a missile. This is an important concept in the
performance evaluation of missile guidance laws. The
capture region is defined as the collection of all initial
conditions from which a missile can intercept a target,
and is a measure of the capturability performance of
the guidance law.
For targets executing a constant maneuver,
Guelman [S] showed that if VM> &I/* and NVM >
V, + V'T, then the missile intercepts the target from
all initial conditions except from those for which
the LOS rate is close to zero (i.e., I/& x 0) and the
missile is initially moving away from the target (i.e.,
Vr0 > 0). In Ha, et al. [ l l ] some sufficient conditions
of capture against an arbitrarily maneuvering target
were obtained using the Liapunov technique. It
turns out that the capture region which results
from these conditions is very small when compared
with that obtained in Guelman [S] for a constant
target maneuver. To illustrate this, in Fig. 2 we
show these capture regions for two different sets of
initial conditions. The capture region for a constant
maneuver is obtained by using the sufficient conditions
given by Guelman [S, Theorems 1 and 21. The capture
region for a time-varying maneuver is obtained from
1338
the sufficient conditions given by Ha, et al. [ l l ,
Theorem 11. The latter capture region is bounded
by a maximum limit on the initial range, and is also
dependent on the target velocity direction and the
acceleration bounds. Also, from Fig. 2 it is immediately
apparent that this capture region is insignificantly
small compared with the constant maneuver capture
region which is unbounded. Ha, et al. give another
capture condition [ll,Theorem 21 which attempts
to define capture outside this region. Unfortunately,
this condition cannot be translated in terms of initial
conditions since it is required to be satisfied on
the entire trajectory during the engagement period.
However, even if we assume this condition to hold for
the entire trajectory, the capture region so obtained
still remains a very small subset of the constant
maneuver capture region.
We show that the actual capture region for
time-varying target maneuvers is much larger than
is given by the capture conditions in Ha, et al.
[ l l ] (in fact, it is unbounded). It turns out that
the seemingly drastic reduction in capture region
shown by Ha, et al.3 results [ l l ] is mainly due to
the overly restrictive sufficient conditions imposed
by the Liapunov technique and not because of the
time-varying nature of the target maneuver. We also
show that though a bounded time-varying target
maneuver does change the capture region to some
extent (as compared with the constant target maneuver
case [S]), it does not reduce it drastically. Further, we
show that the worst-case capture region is obtained
when the target executes a constant maneuver equal to
the bound on the maneuver level.
C.
Target Maneuver Model
An intelligent target is expected to perform evasive
maneuvers to increase its probability of escape. Since
the target maneuvers considered here are restricted
to the application of lateral acceleration normal to
the velocity vector of the target, only the angular
orientation of the target velocity vector, given by
p, changes. Since the lateral acceleration AT is the
control used by the target to evade capture, it is
reasonable to model this as a bounded piecewise
continuous function in time (Ha, et al. [ll]). The
variation of AT over a given interval of time is called
a target maneuver profile and is denoted by d.The
target flight direction (or angle) p varies according
to the lateral acceleration applied by the maneuvering
target. The angle p is a continuous function of time
and, for a given target maneuver profile, is given
by (9). Alternatively, one may also consider the
instantaneous target angle ,f3 at a given instant in
time to be a function of the average target
acceleration AT, or the average turn rate &, until
that time.
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 32, NO. 4 OCTOBER 1996
Ill. CAPTURABILITY CONDITIONS FOR
TIME-VARYING TARGET MANEUVERS
A.
Some Preliminary Results
Adopting the approach in Guelman [8], the
following lemmas were used to carry out a qualitative
analysis of (13) and (14). For this we denote the roots
of VOT= 0 as 80 and of V,T = 0 as 8,.
LEMMA 1 For any piecewise continuous target
maneuver profile A and a constant time t, if u > 1and
k u > 1, then the roots of the equations V,T = 0 and
V ~ =T0 alternate along the 0 axis.
PROOF Let us assume t = ti (a constant). Further, let
Thus, p1 is the net angular excursion of the target
velocity vector until the time tl. Consider a constant
target maneuver profile d having a maneuver level
AT = AT(t1). This will also cause a net angular
excursion of p1 at time tl. Thus, V& (and V,T),
plotted against 8 at t = tl, will be the same for both
A and A. Since, according to [8, Lemma 11 (or [7,
Lemma 11, if AT(t1) = 0), the result is true for the
constant maneuver profile A, it must also be true for
the piecewise continuous maneuver profile A. This
completes the proof.
LEMMA 2 For any piecewise continuous target
maneuver profile A and a constant time t, if u > 1 and
k u > 1then,
Fig. 3. V,T and Ver profiles for fixed f.
Equation (16) gives the So class of sectors, while
(17) gives the S, class of sectors defined in [S]. It is
important to note that these Se and S, sectors are
independent of the target acceleration. However,
unlike in [8],a B belonging to one of these sectors is
not a sufficient condition for it to be a root of the
corresponding VeT = 0 or V,T = 0 equation for some
t. In other words, for a given target maneuver profile
A, there may not exist a t for each t9 E So (or each
B E S,) such that VOT= 0 ( 6 =~
0). This is in contrast
to the situation in [S] where (16) and (17) were both
necessary and sufficient conditions. In fact, this is the
point of departure of our analysis from the analysis
in [8].
For a given target maneuver profile A, let ,b’ =
A y T t be the net angular excursion by the target
velocity vector. Then the roots of V& = 0 must satisfy,
sin(8e -
where Be is a root of
VeT = 0.
PROOF Let t = tl (a constant) and define p1 as in
(15). Now, the proof follows a similar argument as
Lemma 1 above but uses [7 and 8, Lemma 21.
From Lemmas 1 and 2, a general representation of
V,T and VeT profiles with respect to 8 for any given
time t can be obtained (see Fig. 3). From (13) and
(14) one can deduce that the roots of V ~ =T0 and of
V,T = 0 must satisfy the following necessary conditions
P) = --usin(k& - $0).
(19)
Satisfaction of (16) ensures that the right-hand side
(RHS) of (19) lies between -1 and 1, which makes the
equation feasible. For a constant non-zero maneuver
profile /3 goes on increasing (or decreasing) linearly
with time, and hence for any 80 E So, there is a time t
for which the value of p is such that (19) is satisfied.
But, for a time-varying target maneuver profile, this
may not be the case. Now, consider such a maneuver
profile A defined in the time interval [O,T].Define,
8o, - -sin
k
and
8o,
+- -sin
2k k
-’(:)
5 or 5 enO+ - + -sin
.
2k
k
(17)
where,
QO
8nO -O0----
k
nr
k ’
n = O , & l , f 2,....
(18)
The existence of P m a x ( d ) and ,b’min(d) is assured
since p is a continuous function of t [13]. Obviously,
P m a x ( A ) 2 0 and pmin(d)
5 0, for all A. The set
B(A) = [ p m i n ( A ) , P m a x ( d ) ] is called the attainable
set of the target flight direction for a given A. This
implies that for every p E B(A) there exists a time
t E [O,T]such that AvTt = p. Let Ne(d) and N,(d)
be collections of the roots of VOT= 0 and V,T = 0,
respectively, for some A. Thus, it is easy to see
GHAWGHAWE & GHOSE: PURE PROPORTIONAL NAVIGATION AGAINST TIME-VARYING TARGET MANEUVERS
1339
P
t
This gives us a straightforward way of determining
I
No(d)without an exhaustive search over SO and B(A)
to obtain those (6,p) pairs which satisfy (19). Let
p: ( n = 1,2) be the nth nonnegative value of P for
which (p,f (p)) touches the boundary of So as we
increase p from 0 to 00. Similarly, let p; ( n = 1,2)
be the nth negative value of p for which (p,f
touches the boundary of SO as we decrease /3 from 0
to -m. These are also shown in Fig. 4. To obtain these
values we first compute the boundaries of SOgiven
by (16). Substituting these in (19) and solving for p
immediately gives us p: and p;. Next we obtain Pz’
and p; from,
(Pi)
pz’
= p;
+ 2T,
p;
= p:
(24)
-2T.
The boundaries of No(A) can then be obtained from
the following lemma.
Fig. 4. p versus 0 in So sector.
LEMMA 3 For a given piecewise continuous target
maneuver profile A, and v > 1, k u > 1, if
that,
Pmax 2 PT; or Pmin 5 Py; or P m a x 2 P: and
5 p;; then &(.A) = S O.
b) P m a x 2 p: and p m i n 2 p;; then one of the
a)
Pmin
&(A) = (6 E SO : 3 p E B(d) 3 V& = 0) C So
Pa)
N,(d) = (6 E S, : 3 p E B(A) 3 V ~ =
T 0 ) 5 Sr
(21b)
and hence, using a result from [S], we conclude that
for any A, NO(A) and N,(d) are disjoint when u >
4 (is.VM
, > &VT). Unlike the So and S, sectors
the NO(A)and N,(A) sectors depend on the target
maneuver profile and may vary in width in different
So and S, sectors, respectively. Another point worth
mentioning is that even for a known target maneuver
profile (except the constant one) it is difficult to
obtain an analytical expression for the boundaries of
NO(A)and N,(d) sectors. However, it is fairly easy
to compute these boundaries using the technique
described below.
From (19) we obtain,
dp
-=
d6
I+
k~ C O S ( ~ @- (PO)
41-
(22)
u2sin2(k8 - $0)
It is easily proved that dp/dO cannot attain the value
zero for any value of 6 E So if k u > 1 and v > 1.
Hence, d p / d @is either positive or negative, i.e., p
either strictly increases or strictly decreases with 6 in
any So sector (see Fig. 4). Let a function 6 = f (P) be
such that it satisfies (19). Obviously, f is continuous
and, for a given target maneuver profile A, is defined
over a compact set B(A). Thus, f will have both a
minimum and a maximum. Let the values of 6 E SO
for which these extrema occur be denoted by Omin and
Omax. Then it can be easily seen that
boundaries of No(A) is given by the boundary of So
which (p: ,f (p:)) touches. The other boundary is given
by solving for 6 in the equation,
+
sin(@- pmin) usin(k6 - q50) = 0.
(25a)
5 p: and ,Omin 5 p r ; then one of the
C)
boundaries of NO(A) is given by the boundary of SO
which (p; ,f (p;)) touches. The other boundary is ,pen
by solving for 6 in the equation,
+
sin(6 - Pmax) usin(k6 - $0) = 0.
(25b)
d) &ax 5 p: and ,Omin 2 p;; then the boundaries of
No(d) are given by solvingfor 8 in (25a) and (25b).
PROOF The proof is easily constructed using Fig. 4.
A similar result for determining N r ( d ) can be
obtained. Note that for a constant non-zero maneuver
profile, condition a) in Lemma 3 is automatically met
for a sufficiently large time interval. In general, for
each So and S, sector, both No(d) So and N,(A) 5
S, are nonempty. This can be easily seen from the fact
that B is always nonempty since 0 E B(d) for all A.
Now, from [7l we know that there exists a 6 in each So
such that (19) is satisfied for /3 = 0. Hence, this 6 must
for all A. Similarly, we can show that
belong to NO(d)
for p = 0 there exists a 6 E S, which also belongs to
Nr(A).
LEMMA 4 Given any piecewise continuous maneuver
profile A and a constant time t = tl; if v > 1 and
ku > 1, then
a) there exists one and only one value of 6 = O0 in
each No(d) sector such that V&(&,tl) = 0;
1340
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 32, NO. 4 OCTOBER 19%
Fig. 6. Sectors in target-centered polar plane.
N:lAl
N;ldl
N$LAlN&4l
N$Al
N;l.Al
plane for a constant t. It is easy to see that,
Fig. 5. Sectors in (V,,,O) and (V,T,@)
plane.
a,+5 1?,+ (4,u;
b) there exists one and only one value of 8 = 8, in
each N,(d) sector such that V,~(@~,tl)
= 0.
Of
E q; (A),
c 17; (4 c; 5 I'; (4
where, the u sectors are as defined in [S] and are
shown here in Fig. 5. Based on the above lemmas and
the division of the plane of pursuit into sectors the
following theorems are stated and proved.
PROOF Define p1 as in (15). Consider a constant
target maneuver profile d with a maneuver level
AT = &(tl). According to [S, Lemma 31, the resulting
function VOT(8,tl)will have only one root OO E SO.This
particular 60 must satisfy (19) at t = t l and hence must THEOREM 1 A missile M using a PPN guidance
Since there is only one such 80 E SO, law and pursuing a target T maneuvering with a given
belong to N@(d).
there will be a single root inside No(A)too. Similar
bounded piecewise continuous target maneuver profile d
arguments for N,(d) also hold. This completes the
is guaranteed to capture the target from any initial state
proof.
not belonging to the sector N: (d),if VM> f i V ~and
N > l + VT/VM(i.e., v > fi and kv > 1).Also, the
B. Capturability Conditions
missile arrives at the target in the interior of a N[ (d)
sector
For a given target maneuver profile A, the entire
plane of pursuit in the target-centered coordinate
system is divided into eight different sectors as follows:
&+(A) = (6 : V0(8,t)= 0, Vr(8,t)> 0, for some t }
N;(d) = (8 : V,(@,t)= 0, V,(O,t)< 0, for some t }
N:(d) = (6 : V r ( 8 , t )= 0, VO(8,t)> 0, for some t }
N,-(d) = (6 : Vr(8,t)= 0, V0(8,t)< 0, for some t }
qz (A) = { 8 : V,(8,t ) > 0, for all t }
(26)
q;(A) = (8 : VO(8,t)< 0, for all t }
11," (A) = { 8 : V,(8,t> > 0, for all t }
q,-(A) = (8 : V,(O,t) < 0, for all t } .
These sectors are shown in Fig. 5 in the (VOT,8) and
(V,T,~)
plane and in Fig. 6 in the target-centered polar
PROOF Consider the initial state to be such that
(A)n $ ( A ) . From Fig. 5 we have V,O> 0 and
80 E
VOO
> 0, i.e., both r and 8 are increasing. It is easy
to show that the state moves into q; (.A) and then
approaches and finally enters N; (A) in finite time.
In this region V, < 0 and so r goes on decreasing
with time until the state at some time t reaches the
= 0. This automatically
value Be for which VO(eO,t)
leads to interception. Similarly, it can be shown that
80 E q, (A) rlq: (A) also leads to interception. Finally,
it is apparent that if 80 E N;(d) then 6 remains in this
sector until interception.
The above theorem provides a sufficient condition
for capture for a given target maneuver profile. The
capture region so demarcated contains the capture
region for a constant target maneuver profile given
GHAWGHAWE & GHOSE PURE PROPORTIONAL NAVIGATION AGAINST TIME-VARYING TARGET MANEUVERS
1341
in [S]. Hence, so far as the capture region outside
the S l sector is concerned, the capture region for a
constant target maneuver is the same as that for an
arbitrarily time-varying target maneuver. Also, any
target maneuver profile A which satisfies condition
a) in Lemma 3 will have the same capture region
outside the N , f ( A ) sector (which, for this case, is the
same as the S l sector) as the constant non-zero target
maneuver. Hence, considering the worst case target
behavior, subject to the limitation that the maneuver
profile is piecewise continuous and bounded, we have
the following corollary to Theorem 1.
Lemma 3 then A1 = A2 = 0 and N,'(A) and N;(A)
become independent of A and 00. In fact, they become
identical to S,' and S;, respectively, which are defined
in [S] for a constant non-zero target maneuver profile.
Hence, according to Theorem 1, for a given
target maneuver profile A, if u >
and k u > 1,
then the missile can capture the target if the initial
missile velocity vector lies outside the N,' (A) sector.
According to Corollary 1, for any bounded piecewise
continuous target maneuver profile, the missile can
capture the target if its initial velocity vector lies
outside the S
,' sector.
COROLLARY 1 For any bounded piecewise continuous
target maneuver profile, capture is guaranteed if the
; and all the other conditions
initial state lies outside ,S
of Theorem 1 are satisfied.
C.
Capturability in the
N l ( d ) Sector
Now let us consider the only remaining sector
PROOF The proof follows from the fact that the
; sector
largest N , f ( A ) sector possible is the S
(according to Lemma 3). Since Theorem 1 is true for
any bounded piecewise continuous target maneuver
profile, the proof is immediate.
N:(A). Let the initial state be such that 60 E N:(A).
Note that Corollary 1 is independent of the
actual value of
This is a generalization of [S,
Theorem 11.
To express the capture region given in Theorem
1 in terms of a missile-centered coordinate system
we may redefine the Ne(A) sectors in terms of the
missile flight direction angle a (defined with respect
to the LOS in Fig. 1) and redenote them as N $ ( d )
and N; (d)corresponding to N: ( A ) and N; (A),
respectively. Thus, a0 E N,(A) if there exists a /3 E
B ( d ) such that
Substituting (12) and (4) we obtain
sin(& - p) + usinao = 0.
Obviously, a necessary condition for an
(27) is
(YO
n=Oorl.
A1 2 0,
A2
2 0)
(29a)
N;(A) = { a : -sin-'(l/v)
5 sin-'(l/v)
+ n +A2
r6 = ~ s -eAT(t)cos(O - p)
(30)
(31)
where
Vs = (k - 1 ) V , cos(k0 - $0)
+~
VCOS(O
T - p).
(32)
v, = ( N
(28)
+ A1 5 a
- A2;
+ vTcos(e - p)(e - p).
LEMMA 5 Consider a piecewise continuous target
maneuver profile A. Let
Hence, we may alternatively define N,' (A) and N; ( A )
as
< sin-'(l/v)
dVo/dt = r6 + re = kVMcos(k0 - #o)h
Note that AT(^) is piecewise continuous and hence
may have a finite number of points of discontinuity.
However, at these points p is continuous though it is
not differentiable in the conventional sense. Thus, in
(27) such cases we have to use the notion of a subgradient
[14] of p. The value of the subgradient will naturally be
to satisfy
given by the expression for p in (4).
n.rr - sin-'(l/v) 5 a0 5 n.rr + sin-'(l/v),
N,f(A) = { a : -sin-'(l/u)
From (11) we get,
5a
+ .rr - A2; A1 2 0, A2 2 0)
a)
b)
-
2)JV$ - VT" - 2VT.
(33)
If 8 f N,f ( A ) then, VS2 V,.
If 0 E N; (A) then, Vs 5 - V,.
PROOF If 0 E N,f(A) then it must also satisfy
I sin(k0 - $o)l< l / v since N:(d) 5.:S Hence, we
have
473
I cos(ke - $ o ) ~ L./l
(34)
Also, since 6 E &+(A),
(29b)
V r>~0
for all t
(35)
where A, and A2 depend on A and 00. Hence, Ncw(d) i.e.,
depends not only on the target maneuver profile
vcos(k8 - $0) > cos(ff - p)
for all t .
(36)
but also on the flight direction of the target with
respect to the LOS (i.e., 00). However, if the target
We know that N;(A) S: and S: is invariant with
maneuver profile is such that it satisfies condition a) in respect to the target maneuver profile. Thus, every
6342
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 32, NO. 4 OCTOBER 1996
8 E S l must satisfy (35) and (36) even for a constant
non-zero maneuver level [8], which implies that,
c q k e - $o)
>o
(37)
must be true. From (34) and (37) we get
Also, cos(6 - p) >_ -1 always. Hence, from (32),
,/Ti
V, 2 (k - 1 ) V M 1 /
- 2VT
(39)
is.,
VS2 Ve.
A similar proof for b) also holds.
THEOREM 2 For a missile using a PPN guidance law
and pursuing a target maneuvering with a bounded
piecewise continuous maneuver profile A, if the initial
state is such that 80 E N: (d)and
> &vT (i.e., v > Jz>
N > 2 + ~VT/,/(i.e., V, > 0)
I401> ATmax/Ve
a) VM
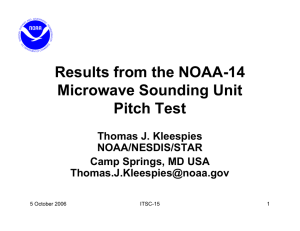
Fig. 7. Brget maneuver profile in example.
then the missile is guaranteed to capture the target.
Corollary 2 is a generalization of [8, Theorem 21.
Simulation results of planar missile-target engagements
[15] with various bounded piecewise continuous
time-varying maneuver profiles confirm the theoretical
results presented here.
PROOF Note that a) and b) above automatically
ensure that k u > 1. From Lemma 5, and condition b)
above we have Vs 2 V, > 0. Hence,
D. Example
b)
C>
(40)
From (31), and the fact that Vs > 0, 6 is an increasing
function of time (i.e., > 0) provided that
and a decreasing function of time if
e < AToCOS(8
- p).
VS
Hence, from condition c) in the theorem if 8p >
AT~=/V
> ~0 then by the above arguments 6 goes
on increasing until the state leaves the N; (d)sector.
Similarly, if 40 < - - A T ~ ~ ~ <
/V
0 ,then 6 goes on
decreasing until the state leaves the NB+( A ) sector.
COROLLARY 2 For any piecewise continuous
time-varying target maneuver profile bounded by ATmax
and satisfying all the conditions in Theorem 2, the
missile is guaranteed to capture the target if the initial
state lies in the S; sectol:
PROOF Theorem 2 is valid for any arbitrary d with
00 E N:(d), and the largest such NB+(d)sector is the
S; sector. Hence the theorem.
Consider the engagement parameters and initial
conditions assumed in Fig. 2(a), i.e., N = 4, VM=
500 m/s, VT = 350 m/s, 00 = 210°, AT^^^ = 25 m/s2.
But the target maneuver profile A is a periodic
square wave switching between
and -ATmax
(Fig. 7(a)). Note that the target maneuver profile is a
piecewise continuous function with a finite number of
discontinuities in any finite time interval. Fig. 7(b)-(c)
and P ( t ) , respectively, with respect to
show
time. From these data we obtain,
Pmin(A) = 0' ,
Pmax(A)
= 30' ,
p E B(d) = [Oo,3O0].
The corresponding relative velocity equations are,
VOT= (?)sin(3@) + sin(6 - p )
= ( ~ ) c o s (-~cOs(6
~ ) - p).
Using the analysis presented in this work we compute
the following sectors:
S: : [-14.8°,14.8"],[105.20,134.80],[225.2",254.80]
Se,j : [45.2",74.8"],[165.2°,194.80],[285.2",314.80]
S,? : [15.2",44.8"],[135.2",164.8°],[255.20,284.80]
GHAWGHAWE & GHOSE PURE PROPORTIONAL NAVIGATION AGAINST TIME-VARYING TARGET MANEUVERS
1343
S
; : [75.2°,104.8"],[195.2",224.8"],[315.20,344.80]
N;(A) : [0",5.6"],[105.2", 105.9"],[Z8.65",254.1"]
" ( A ) : [68.65",74.1"],[Boo,185.6"],[285.2",285.9"]
q"
N:(A) : [15.2", 15.9"],[158.65", 164.1"],[270°,275.60]
.'A' 1B.57"
N ; ( d ) : [9O0,95.6"1, [195.2", 195.9'1, [338.65",344.1"]
a: : (14.8",45.2"),(134.8",165.2"),(254.8",285.2°)
a , : (74.8", 105.2"),(194.8°,225.2"),(314.8",345.2")
a: : (104.8", 13S.2"),(224.8",255.2"),(344.8°,375.20)
44.429
Fig. 8. N$(-A) and N c ( d ) sectors.
a,- : (44.8",75.2°),(164.8",195.2"),(284.8",315.2")
qJ(A) : (S.6°,68.6S"),(105.90,180"),(254.1",285.2")
Copturc region for the
time - mrfmq manwver profile(AUB1
qS(A) : (74. l o ,10S.2"),(185.6",248.65"),(28S.9",0°)
q,!(A) : (9S.6", 158.65"),(195.9",270"), (344.lo,375.2')
qr-(A) : (15.9",90°),(164.1",195.2"),(275.6",338.65").
Actually, in Figs. 5 and 6 we have shown these
~ respect
sectors and the variation of VOTand V r with
to 8 for the target maneuver profile d given in Fig. 7.
Since 80 = 210°, we see that 80 6N: (d)sector and
hence capture is guaranteed by Theorem 1. In fact,
with this initial condition, the target will be captured
irrespective of the maneuver profile it employs. Now,
we obtain the capture region for this case with the
initial missile flight direction angle (YO as a free
variable. For this we need to obtain the &(A) sectors,
i.e., those values of (Y which satisfy
Capture regm far anstant
m a n e w e r prdile ( A )
(+!>sins + sin(210' - p) = o
Fig. 9. Guaranteed capture region for time-varying target
maneuver.
with /3 E B(d) = [Oo,300]. This yields,
N,' (d)= { a : E [Oo, 20.48'1)
Ng (d)= { a : (Y E [159.52', 180°]}.
These are shown in Fig. 8. Now, using Theorem 1
we obtain the result that so long as the initial missile
velocity vector does not belong to the N,'(A> sector,
the missile can guarantee capture of the target, having
a maneuver profile given in Fig. 7(a), irrespective
of the initial range and the actual value of AT^^^.
Further, from Corollary 1 we obtain the result that,
if the missile velocity vector lies outside the S,' sector
then the missile can capture the target irrespective
of initial range, target maneuver profile, initial target
flight direction 8, and the actual value of AT^^^. Inside
the N$(d) sector guaranteed capture is governed by
the sufficient conditions prescribed in Theorem 2.
We note that conditions a> and b) in Theorem 2 are
automatically satisfied by the values of N , VM,and
VT chosen in this example. To satisfy condition a) in
Theorem 2 the following has to be satisfied:
1344
i.e.,
1500sinao + 350sin(210')1
> 1.767R0,
(YO
E N,'(d>.
Fig. 9 shows the complete capture region for the target
maneuver profile A. Note that the capture region for
the constant target maneuver profile, which is shown
here for comparison, is also the guaranteed capture
region given by Corollary 2 irrespective of the target
maneuver profile as long as it is bounded by A T m a x .
IV.
LATERAL ACCELERATION BOUNDS
Performance of a guided missile is also limited by
its lateral acceleration capability. The upper bound
on the latax is mainly due to structural reasons. It
would be useful to obtain conditions under which
the missile latax remains within specified bounds.
This is of special relevance here since it was shown in
the previous section that for any bounded piecewise
continuous target maneuver profile the missile can
capture the target if the initial state lies outside the
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 32, NO. 4 OCTOBER 1996
SJ sector. No restriction on the actual value of AT^^^
was put. In practice, the maximum missile latax during
an engagement does depend on ArmaxHence, results
on missile latax bounds as functions of AT^^^ will
serve as useful measure of the performance of a
guidance law. In Guelman [S] upper bounds on the
required latax was analytically obtained for certain
initial conditions and for a target executing a constant
maneuver. Below we present extensions of these
results for a target executing bounded piecewise
continuous time-varying maneuvers.
A.
THEOREM 3 Given a bounded piecewise continuous
target maneuver profile A, if B0 E N; (A) and
> A)
AM^
VMcos(k8 - $0)
VS< N V ~ c o s ( 8- p)
AM^
in
cos(8-
then IAMI will decrease until
if IAM~I
5 AM,then AM I 5 AM, where,
PROOF According to Theorem 1, if 80 E N; (A) then
8 E N; (A) until interception. From Lemma 5, we have
for 8 E N;(A),
v, 5 -v, < 0.
Since VS< 0, we have,
A T max
eo> Ve
or
.
ATmax
8 0 < -.
Ve
If 80 > A T ~ ~ then
~ / from
V ~(43) we have 60 >
A~ocos(0- p)/V, and so, since Vs < 0, from (31) we
obtain the result that 8 is a decreasing function of
time. Similarly, if 60 < - A T ~ ~ then
~ / V
from
~ (43), &.<
ATOcos(8 - P)/Vs, and hence from (31) we see that 8
is an increasing function of time. This is sufficient to
will decrease until ] A M<[ AM^. On
prove that IAM~
the other hand, if IAM~
I < AM^ then IAMI < AM,for all
time.
We can obtain even tighter bounds on AM if we
assume that the entire pursuit is restricted to a tail
chase which wouId imply that in addition to 80 E
N; (A) we would also require that a/2 5 8 - p 5 37r/2,
i.e., cos(8 - p) < 0.
for all t. (44)
for all t.
(45)
Now for a tail chase, we have cos(8 - p) < 0 and
hence, V , < 0 and,
~-
V,
\AM I 5 A M 1
2)
< VTcos(8 - p)
From (32) and (44), we get,
(i.e., V, > 0 )
then the missile acceleration AM is bounded by
the sense that:
1) if IAM~I
>
a) I f IAM~I> u A T then
~ ~
(AM/
~ decreases until
\AMI 1. U A T m a x is satisjied.
b) I f AM^ 1 5 A AT^^^ then ( A Mcontinues
(
to satisfL
this limit.
PROOF Since 80 E N; (A),8 E N; (A) for all time t ,
and hence V, < 0 for all time t , i.e.,
Bounds on Missile Latax in N;(A)
a) VM > J Z V T (i.e., v
b) N > 2 + 2 V ~ / 4 -
THEOREM 4 For a missile using a PPN guidance law
and pursuing a target maneuvering with a bounded
piecewise continuous target maneuver profile A, if
80 E N;(A), u > &, ku > 1, and the entire chase is
restricted to the rear of the target then the missile latax is
bounded by the following conditions:
p) <-
1
or
do< -A. T m a x
NV,'
Therefore,
eo>
A T max
-
NVT
NVT
If 60 > ATmax/(NVT) then from (47) we have 80 >
AT,cos(8 - p)/Vs. Since VS< 0, from (31) we obtain
the result that 8 is a decreasing function of time. On
the other hand, if 60 < A ~ ~ c o s-( 8p)/Vs then 80 is an
increasing function of time. This is sufficient to prove
that IAMI will decrease until IAMI < AT^^^ Also, if
IAMI < V A T m a x , then it will remain below this bound
for all subsequent time.
Theorems 3 and 4 here extend the results of [8,
Theorems 3 and 41 to arbitrarily time-varying target
maneuvers.
Bounds on Missile Latax in T(;
B.
THEOREM 5 For a missile using a PPN guidance law
and pursuing a target maneuvering with any piecewise
continuous maneuver profile bounded by A T m a x , if
a) 80 E a;
b) N > 4
c ) V, > Av,(ie., u > d7)
and the initial missile latax is such that
1) if IAM~I> AM^, then IAMI will decrease until
1AM
I 5 AM2
GHAWGHAWE & GHOSE: PURE PROPORTIONAL NAVIGATION AGAINST TIME-VARYING TARGET MANEUVERS
1345
2) if IAM~
I 5 A,wz, then lA,wI I
A,w2for all time t
until interception where,
.RENCES
PROOF It is easy to see that 80 E P; implies that
8 E err- for all time until interception, i.e., the missile
always moves towards the target and V, < 0 for all
time. Therefore, we have,
cos(k8 - $0)
1
< --.
(49)
V
Since cos(8 - P) 5 1 always, from (31) we get,
Vs 5 -(N
Thus, if N
> 4 then
ATmax
-(N-4)VT
-
4)I/T.
(50)
Vs < 0, and so
< -ATmax
- - < -4cosp
-
v,
-
-
P)
VS
By the same arguments as above ~AMI
decreases and
remains below the defined threshold.
Theorem 5 is a generalization of [9, Theorem 11,
since it proves that the limits proposed here hold not
only for the constant maneuver profile, but also for all
bounded piecewise continuous target maneuvers.
V.
CONCLUDING REMARKS
In this paper, the qualitative analysis approach
adopted by Guelman [S], for analyzing capture
performance of the PPN law against constantly
maneuvering target, is extended to targets having
bounded piecewise continuous time-varying maneuver
profiles. Sufficient conditions for capture are obtained
for any given target maneuver profile. Sufficient
conditions for capture against worst case target
maneuver profiles are also obtained. The analysis
shows that, in the absence of closed-form solution
for the trajectory equations, the qualitative analysis
approach is the ideal choice for obtaining satisfactory
solutions to such problems. It provides superior results
to the earlier proposed Liapunov technique in the
sense that almost the whole of the guaranteed capture
region can be obtained while the conditions in [ll]
can be used to obtain only a very small portion of the
capture region.
The qualitative analysis approach given here also
provides additional results on missile Batax bounds
for time-varying target maneuvers. These results are
generalizations and extensions of earlier results for
constant target maneuvers. The Liapunov function
technique does not provide these results.
1346
Pastrick, H. L., Seltzer, S. M., and Warren, M. E. (1981)
Guidance laws for short range tactical missiles.
Journal of Guidance, Control, and Dynamics, 4, 2
(Mar.-Apr. 1981), 9%108.
Zarchan, P. (1990)
Tactical and strategic missile guidance.
In Progress in Astronautics and Aeronautics, Vol. 124.
Washington, DC: AIAA Inc., 1990.
Lin, C.-E (1991)
Modern Navigation, Guidance, and Control Processing.
Englewood Cliffs, NJ: Prentice-Hall, 1991.
Siouris, G. M. (1974)
comparison between proportional and augmented
proportional navigation.
Nachrichtentechnische Zeitschrift, 27, 7 (July 1974),
278-280.
Anderson, G. M. (1981)
Comparison of optimal control and differential game
intercept missile guidance laws.
Journal of Guidance, Control, and Dynamics, 4, 2
(Mar.-Apr. 1981), 109-115.
Murtaugh, S. A., and Criel, H. E. (1966)
Fundamentals of proportional navigation.
IEEE Spectrum, 3, 6 (Dec. 1966), 75-85.
Guelman, M. (1971)
A qualitative study of proportional navigation.
IEEE Transactions on Aerospace and Electronic Systems,
AES-7, 4 (AUg. 1971), 637-643.
Guelman, M. (1972)
Proportional navigation with a maneuvering target.
IEEE Transactions on Aerospace and Electronic System,
AES-8, 3 (June 1972), 364-371.
Guelman, M. (1973)
Missile acceleration in proportional navigation.
IEEE Transactions on Aerospace and Electronic System,
AES-9, 3 (June 1973), 462463.
Becker, K. (1990)
Closed-form solution of pure proportional navigation.
IEEE Transactions on Aerospace and Electronic Systems,
26, 3 (June 1990), 526-533.
Ha, I.-J., Hur, J.-S., KO, M.-S., and Song, T.-L. (1990)
Performance analysis of PNG laws for randomly
maneuvering targets.
IEEE Transactions on Aerospace and Electronic Systems,
26, 5 (Oct. 1990), 713-721.
Song, S.-H., and Ha, I . J . (1994)
A Lyapunov-like approach to performance analysis of
3dimensional pure PNG laws.
IEEE Transactions on Aerospace and Electronic Systems,
30, 1 (Jan. 1994), 238-248.
Royden, H. L. (1988)
Real Analysis (3rd ed.).
New York Macmillan, 1988.
van Tiel, J. (1984)
Convex Analysis: An Introductory TeX.
Chichester: Wiley, 1984.
Ghawghawe, S. N. (1994)
A study of pure proportional navigation against arbitrarily
maneuvering targets.
M.E. project report, Department of Aerospace
Engineering, Indian Institute of Science, Bangalore, India,
Jan. 1994.
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 32, NO. 4 OCTOBER 19%
Sandesh Narayan Ghawghawe received the B.E. degree (with distinction) in
electronics and telecommunication from the Visvesvaraya Regional College of
Engineering, Nagpur, India, in 1992, and the M.E. degree (with distinction) in
aerospace engineering from the Indian Institute of Science, Bangalore, in 1994.
While at the Indian Institute of Science he was on a senior research fellowship
from the Defence Research and Development Organisation, India. From 1994 to
1996 he was a scientist at the Defence Research and Development Laboratory,
Hyderabad. He is presently a software engineer at the Siemens Information
Systems, India. His current areas of interest are guidance and control, system
design, and software modeling and simulation for aerospace application.
Mr. Ghawghawe is an associate member of the Aeronautical Society of India.
Debasish Ghose received the B.Sc. (Engg) degree in electrical engineering from
the Regional Engineering College, Rourkela, India, in 1982, and the M.E. and
Ph.D. degrees, also in electrical engineering, from the Indian Institute of Science,
Bangalore, in 1984 and 1990, respectively.
From 1984 to 1987 he worked as a scientific officer in the Joint Advanced
Technology Programme at the Indian Institute of Science, where he is presently
an Assistant Professor in the Department of Aerospace Engineering. His research
interests are in the areas of guidance and control, dynamic game theory, and
distributed computing.
He is one of the authors of a forthcoming book entitled “Scheduling Divisible
Loads in Parallel and Distributed Systems”, published by the IEEE Computer
Society Press in August 1996.
GHAWGHAWE & GHOSE PURE PROPORTIONAL NAVIGATION AGAINST TIME-VARYING TARGET MANEUVERS
1347