From: AAAI Technical Report FS-01-01. Compilation copyright © 2001, AAAI (www.aaai.org). All rights reserved.
From Stereoscopic
Vision to Symbolic Representation
Paulo E. Santos* and Murray P. Shanahan
{p.santos, m.shanahan}@ic.ac.uk
Intelligent and Interactive SystemsGroup
Imperial College of Science, Technologyand Medicine
University of London
Exhibition Road SW72AZLondon
Abstract
Thispaperdescribesa symbolicrepresentationof the
data providedby the stereo-visionsystemof a mobile
robot. Therepresentationproposed
is constructedfrom
qualitativedescriptions
of transitionsin the depthinformationgivenby the stereograms.Thegoal of this paper is to investigatethe consequences
in the depthtransitionsof qualitativespatial eventssuchas the relative
motionbetweenobjects,spatial occlusionandobject’s
deformation(expansionand contraction).Thiscausal
relationshipbetween
spatialeventsanddepthtransitions
formsa background
theoryfor an abductiveprocessof
sensordata assimilation.
Introduction
Oneof the most important issues in mobilerobot navigation is the connectionbetweenthe physical world and the
internal states of the robot. The term "anchoring"(Coradeschi &Saffiotti 2000),refers to this processof assigningabstract symbolsto real sensor data, and is related to the symbold grounding problem (Harnard 1990). There are three
mainpossible approachesto this problem,either this connection is explicitly madevia a knowledgerepresentation
theory, such as (Shanahan1997)(Hahnel,Burgard, & Lakemeyer1998),or it is hiddenin the layers of neural-networks
(Racz&Dubrawski1995)or, finally, there can be no representation of the robot’s internal states whatsoever,as is the
case with purely reactive systems (Brooks 1991a)(Brooks
1991b). Althoughthe last two frameworksgive important
solutions to certain sets of problems,they are insufficient
for the construction of task planning systems using sensor
information. For this reason the present work assumesa
knowledgerepresentation view of the connection between
sensor informationand abstract symbols.
Briefly, the goal of the present workis to developa logicbased systemfor scene interpretation using dynamicqualitative spatial notions. Therefore,not only is anchoringa
central topic in this work,but the sceneinterpretationissues
discussed in this paper are also going to contribute to the
understandingof howto track and predict future states of
*Supportedby CAPES.
Copyright(~) 2001,American
Associationfor Artificial Intelligence(www.aaai.org).
All rights reserved.
37
symbolicrepresentations of objects in a robot’s knowledge
base.
This paper assumesa stereo vision system embeddedin
a mobile robot as the source of data about the world. A
symbolicrepresentation of the sensor data fromthe vision
systemis constructedassuminga simplification of the stereograms, a one-dimensionalview of the scene (horizontal
cut). Thedepths and edgesof the bright contrasting regions
in the stereogramnoted in this vieware, then, turned into
two-dimensionalcharts, nameddepth profiles.
Peaksin depth profiles are connectedto sensed objects
(e.g. physical bodies, occludingphysical bodies, light reflexion, sensor noise). Eachdepth profile is, thus, a snapshot of the robot’s environment
as notedby the its sensorsat
a time instant. Anexampleof the output of the vision system, a horizontal cut and the correspondingdepth profile is
shownin figure 1.
In this paperweare interested in explainingincomingsensor data by hypothesising the existence and dynamicrelationships betweenphysical objects (and betweenphysical
objects and the observer). The incomingsensor data is assumedto take the form of temporally ordered sequences of
depth profiles. This process of considering hypothesesto
interpret a sequenceof sensor informationrecalls the sensor data assimilation as abduction proposedin (Shanahan
1996). In fact the inspiration for the present workwas to
proposea newqualitative backgroundtheory about space for
this framework.In this paper, the backgroundtheory about
space takes into accountdynamicalrelations, thus the notion
of time plays an importantrole in this theory.
Thereare manyapproachesto qualitative theories for time
and for space. Van Benthen(van Benthen1991) presents
discussion about the mainproblemson defining an ontology for time. A comprehensiveoverview of the field of
spatial reasoning is presented in (Stock 1997). Although,
theories about qualitative space and time address important
problems,most of themare not concernedwith central issues in robotics such as howspace is related to real sensor
data, nor are there any eoneernwith respect to predicting
sensor data as events happenin the world. The framework
presented in this paper introduces someideas to overcome
these limitations.
In termsof qualitative theories of space,particularlyrelevant to this workis the RegionOcclusionCalculus (ROC)
(Randell, Witkowski, & Shanahan 2001). The ROCis a
first-order axiomatisationthat can be used to modelspatial
occlusion of arbitrary shapedobjects. The formal theory is
defined on the degree of connectivity betweenregions representing two-dimensionalimages of bodies as seen from
someviewpoint. This paper presents a dynamiccharacterization of occlusion as noted by a mobilerobot’s sensors,
whichcould extend ROC
by introducing time into its ontology.
Stereo-Vision System
The stereo-vision systemused in this workis Small Vision
System(SVS), whichis an efficient implementationof an
area correlation algorithm for computingrange from stereo
images. The images are delivered by a stereo head STHMD1,whichis a digital device with megapixelimagers that
uses the 1394bus (FireWire)to deliver high-resolution, real
time stereo imageryto any PCequippedwith a 1394interface card t.
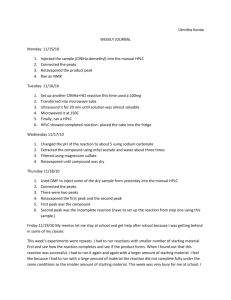
Figure1 showsa pair of input images,the resultant stereo
disparity imagefrom the vision systemand a depth profile
of a scene.
quenceof profiles is a sequenceof temporallyordered snapshots of the world. For brevity, assumethroughoutthis paper that a profile Pi representsthe snapshottaken at the time
point tl, for i e N.
Informationabout the objects in the world, as noted by
the robot’s sensors, is then encodedas peaks (depth peaks)
in depthprofiles (figure 2b).
The variables edgeand depth in the depth profiles range
over the positive real numbers.The edges of a peak in a
profile represent the imageboundariesof the visible objects
in a horizontalcut.
Thedepthof a peakis assumedto be a measureof the relative distance betweenthe observer (robot) and the objects
in its field of view.Purther investigation shouldbe donein
order to extendthis notion to take into accountthe depthsin
the objects’ shape. This wouldlead to the treatmentof the
peak’sformat as an additional informationin the theory.
The axis depth in a profile is constrainedby the furthest
point that can be noted by the robot’s sensors, this limiting
distance is represented by L in the charts (figure 2b). The
value of L is, thus, determinedby the specification of the
2.
robot’s sensors
a)
J
¯
e
f
i
...........
d.
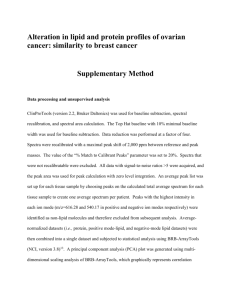
Figure 2: a) Twoobjects a, b notedfrom a robot’s viewpoint
v; b) Depthprofile (relative to the viewpointv in a) representing the objects a and b respectively by the peaksp and
q.
Figure 1: Imagesof a scene (top pictures); stereogramgiven
by SVS(bottomleft picture); and depth profile of a scene’s
horizontal cut (bottomcentre image).
DepthProfiles
In order to transform the stereogramsfrom the vision systeminto a high-levelinterpretation of the world,a simplification of the initial data is considered.Instead of assuming
the wholestereogramof a scene, only a horizontal line of
it (horizontal cut) is analysed. Eachhorizontal cut is represented by a two-dimensional
chart (depth profile) relating
the depths and the extremeedgesof bright contrasting regions in the portion of the stereogramcrossedby the cut. An
exampleof a depthprofile is shownin figure 2b.
Depthprofiles can be interpreted as snapshotsof the environment,each profile taken at a time instant. Thus, a se~BothSVSand STH-MD1
weredevelopedin the SRIlaboratoties, http:flwww.ai.sri.com/konoligeYsvs/index.htm.
38
Animportant information embedded
in the depth profiles
is the size of the peaks. The size of a peakis given by the
moduloof the subtraction betweenthe values of its edges
(e.g. in figure 2b the size of the peakq is definedby le- dl).
Thus,the size of a peakis connectedto the angulardistance
betweentwoobjects in the worldwith respect to a viewpoint.
Differences in the sizes (and/or depths) of peaksin the
sameprofile and transitions of the size (depth)of a peakin
sequenceof profiles encodeinformationabout dynamicalrelations betweenobjects in the worldand betweenthe objects
and the observer. Themaingoal of this workis to d.evelop
methodsto extract this informationfor sceneinterpretation.
It is worthypointing out that, for the purposesof this
work,the variables depth and edge do not necessarily have
to represent precise measurements
of regions in a horizontal cut of a scene, but approximatevalues of these quantifies within a predefinedrange. However,
the values of these
2Thepractical limit (L) for depthperceptionin the apparatus
availablefor this workis about5 meters,readingsfurtherthanthis
has shown
to be veryunreliable.
variables should be accurate enoughto represent the order
of magnitudeof the actual measurementsof depth and size
of objects in the worldfromthe robot’s perspective.
In this work,depthprofiles are assumedto be the only informationavailable to the robot about its environment.The
purpose of this assumptionis to permit an analysis of how
muchinformation can be extracted from the vision system
alone, makingprecise to whichextent this information is
ambiguousand howthe assumption of new data (such as
robot’s proprioception)can be used to disambiguateit.
their logical descriptions wouldbe too extensiveto be taken
into account completely.Thus, the strategy of the reasoning systemis not to alwaysprovidinga correct answer,but
to concludea possibly correct interpretation of the sensor
transition. If this interpretationturns out to be false, another
hypothesisshould be searchedfor.
Example2: Occlusion betweentwo objects Figure 4 is
anotherexampleof a depthprofile sequence.In this case the
profiles contain two peaks, p and q, possibly representing
twodifferent objects in the observer’sfield of view.
Motivating Examples
In order to motivatethe development
of a theory about depth
information two examplesare presented.
Example1: Approaching an Object Assuming the two
profiles in figure 3 as constituting a sequenceof snapshots
of the world taken fromthe viewpointof one observer (u).
Common
sense makesus suppose that there is an object in
the worldrepresentedby the peakp which,either:
1. expandedits size, or
2. was approachedby the observer, or
3. is approaching
the observer.
It is worthypointing out that any combinationof the previous three hypothesis wouldalso be a plausible explanation for this profile sequence.Thechoiceabout the best set
of hypothesesto consider should followa modelof priority,
whichis not developedin the present paper.
Thetransition in the profile sequencethat suggeststhese
hypothesesaccountfor the decreasein the relative depth of
the peak p from P1 to P2. The task of a reasoning system,
in this domain,wouldbe to hypothesisesimilar facts given
sequencesof depth profiles.
P1
VI
kedge
P2
v I
Figure 3: Depthprofile sequenceP1, P2.
Thereare other plausible hypothesisto explain this profile sequencethat werenot consideredin this example..For
instance, it could be supposedthat in the interval after P1
and before P2 a different object wasplaced in front of the
robot’s sensors that totally occludesthe object represented
in P1. This is not a weaknessof the present work, but an
exampleof its basic assumptionconcerningthe incompleteness of information. For the sake of this simple example
it mighthavebeing possible to enumerateall of the possible hypothesisto explain the scenario in figure 3, however,
in a more complexsituation the amountof hypothesis and
39
P2
P1
P
F
v
edge
vI
P3
edge
q
~"edge
]P4;
vI
kedge
Figure 4: A depth profile sequence P1, P2, P3 and P4.
Intuitively, analysingthe profile sequencein figure 4, the
transition fromP1 to P2 suggeststhat either the twoobjects
representedby p and q weregetting closer to each other or
the observer waseircling aroundp and q in the direction of
decreasingthe observer-relative distance betweenthese two
objects.
Moreover,from P2 to P3 it is possible to supposethat
the object represented by q and p are in a relation of occlusion, since the peaks p and q in P2 becameone peak in
P3. Likewise, from P2, P3, P4, totally occlusion between
twoobjects can be entailed, since the peaksp and q changed
from two distinct peaks in P2 to one peak in P3 (whiehis
a compositionof the peaks in P2), and eventually to one
single peak(in P4).
In the next section these notions are mademorerigorous.
Peaks, Attributes
and Predicate Grounding
In the present section a formal languageis defined to describe depthprofiles transitions in termsof relations between
the objects of the worldand the observer’s viewpoint.
Thetheory’s universeof discourseincludes sorts for time
points, depth, size, peaks, physical bodies and viewpoints.
Timepoints, depthandsize are variables that rangeover positive real numbers(R+), peaksare variables for depthpeaks,
physical bodies are variables for objects of the world, viewpoints are points in Ra. Amany-sortedfirst-order logic is
assumedin this work.
The relation peak_of(p, b, v) represents that there is a
peakp assigned to the physical bodyb with respect to the
viewpointv. This relation plays a similar role of the predicate groundingrelation defined in (Coradeschi&S~Tiotti
2000).
Apeakassignedto an object is associatedto the attributes
of depthandsize of that object’s image.In orderto explicitly
refer to particular attributes of a peakat a determinedtime
instant t, twofunctionsare defined:
¯ depth:peak x time point ~ depth that gives the peak’s
depthat a timeinstant; and
¯ size: peak x time point -+ size, which mapsa peak and
a time point to the peak’sangularsize.
Besidesthe informationabout individual peaks, information
about the relative distance betweentwopeaksis also important whenanalysingsequencesof depth profiles. This data is
obtained by introducing the function dist described below.
¯ dist: peak x peak x timepoint ~ size, mapstwo peaks
and a time point to the angular distance separating the
peaksin that instant. This angulardistance is the modulo
of the subtraction of the nearest extremeedges between
two peak (e.g. in figure 2b the distance betweenpeak
and peakqis given by Ib - el).
It is worthypointingout that the depthprofiles of a stereogrammaycontain peaksrepresenting not only real physical
objects of the worldbut also illusions of objects (e.g. shadowsand reflexes) and sensor noise. This kind of data cannot, in most of the cases, easily be distinguished from the
data about real objects in the robot’s environment.In order
to cope with this problem,the frameworkpresented in this
paper assumes,as a rule of conjecture, that every peak in a
profile represents a physical bodyunless there is reasonto
believe in the contrary. In other words,this is the assumption that the sensors (by default) note only physical bodies
in the world,illusions (andnoise) of objects are exceptions.
Onewayto state this default rule formallyis by the use of
circumscriptionin a similar wayas presented in (Shanahan
1996) and (Shanahan 1997). A complete solution to this
problem,however,is a subject for future research.
Relations and Axioms
Assumingthat the symbolsa and b represent physical bodies, v represents the observer’s viewpoint,and t represents
a time point, the followingrelations are investigatedin this
paper:
1. being_approached_by(v,
a, t), read as "the viewpoint u
is beingapproachedby the object a at timet";
2. is_distancing_from(a,v, t), read as "the object a is dislancing fromthe viewpointu at time t";
3. approaching(u,a,t), read as "the viewpoint u is approachingthe object a at time t";
4. receding(u, a, t), read as "the viewpointu is receding
fromthe object a at timet";
5. expanding(a,u, t), read as "the object a is expanding
fromthe viewpointu a at t";
6. contracting(a,v, t), read as "the object a is contracting
fromthe viewpointu a at t";
getting.closer(a,
b, u, t), read as "the objects a andb are
7.
getting closer fromeachother with respect to v at t";
8. getting_further(a, b, u, t), read as "the objects a and b
are getting further fromeach other with respect to v at t";
9. eireling<(u,a, b, t), read as "u is circling aroundobjects
a and b at t in the direction that the distancebetween
their
imagesis decreasing";
10. circling>(v, a, b, t), read as "u is circling aroundobjects
a andb at t in the direction that the distancebetweentheir
imagesis increasing";
11. occluding(a,b, v,t), read as "a is occludingb fromv at
timet"; andfinally
12. totally_occluding(a,b, v, t), read as "a is totally occluding b fromu at timet";
Theserelations are hypothesesassumedto be possible explanationsfor transitions in the attributes of a peak(or set of
peaks). The formulae[A1] to [A6] below express the connectionsbetweenthe relations 1. to 12. stated aboveand the
transitions in the peaks’attributes.
[A1]Vavt being_approached_by(v,a,
t)V
approaching(v,a, t) V expanding(a,u, t)
3ptlt2(tl
< t)
A (t
< t2)A
peak_of(p,
a,u)A (depth(p,
tl)< de~h(p,
Theformula[A 1] states that if there exists a peakp representing the object a fromthe viewpointu suchthat its depth
decreasesthrougha sequenceof profiles, then it is the ease
that either the observeru is beingapproached
by the object,
or the observer is approaching
the object, or the object is
expandingitself.
The relations is_distancing_f rora / 4, receding~4and
contracting~3can be similarly stated. As shownin the formula[A2].
[A2] Vaut is_distancing_from(a, u, t)V
receding(v, a, t) V contracting(a, u,
3ptlt~(tl < t) A (t < t2)A
peak_of(p, a, u) A (depth(p, tl) > depth(p, t2))
Likewise,the event of two bodies getting closer to each
other (or the observer movingaroundthe objects) at an instant t followsas hypothesisto the fact that the angulardistance betweenthe respective depth peaksto the two objeets
decreases throughtime. The formula[A3]belowstates these
facts. Theoppositerelation, getting further, is stated by the
formula[.44].
[A3]Vabut[getting_closer(a, b, u,
t)V
circling<(u,a,b,t)] A (a y£ b) ~-3pqht2(ta < t) A (t < t2) Apeak_of(p,a,v)A
peak_of(q,b,u) A (dist(p,q, t2) < dist(p,q,
40
[.44] Vabut Letting_further(a, b, u, t)Y
circling>(u, a, b, t)] A(a ¢ b)
3pqtlt2(tl < t) A (t < t2) Apeak_of(p,a,u)A
peak_of(q,b, v) A (dist(p, t2)> dist (p, q, ~1))
Assumethe relation connected(p, q, t), read as "peak p
is connectedto peakq at time t"; connected(p,q, t) holds if
the distancebetweenthe peaksp and q at timet is zero.
of reading the formulaeaboveis assumingthe predicates in
the left-hand side as actions to be manipulatedby a planning
system. In this cause, the formulae[All to [A6]can be understoodas rewriting roles for these actions in termsof the
expectedsensor transition.
As the present paper is concernedwith the first interpretation, sensor data assimilation via an abductiveprocessis
briefly discussedin the next section.
Sensor Data Assimilation
Vpqtconnected(p,q, t) ~- ( dist(p, q, t)
Notethat the previousrelation is only definedfor peaks,
it has no relation to the degree of connectivity betweentwo
physical bodies. In this article the relation connected~3is
only used to characterise the occluding~4relation, as stated
in formula [A5]below.
[A5] Vabut occluding(a, b, v, t) A (a ~ b)
3Pq~I($1
~ ~) Apeak_of(p,a, y)A
peak_of(q,b, u) A -~connected(p,q, tx
Aconnected(p,q, t) A [size(q, t) < size(q, tl)V
size(p, t) < size(p, tl)]
Theformula[.45] states that one of the objects a and b is
occludingthe other at time instant t, if the peaks p and q
(connectedat t) are not connectedat sometime point before
t and the size of one of the peaks is shrinking through the
given profile sequence.
Similarly to occluding~4,if at an instant tl (tl < t)
wasthe ease that occluding(a,b, v, t), andat t the peakrepresenting b disappearsfromthe profile (i.e. size(q, t) =
then one of the objects is totally occludingthe other. As
representedin formula[.46].
As already mentioned,this workfollows a similar approach
to that proposedin (Shanahan1996),the task of sensor data
assimilationof a streamof sensor data is consideredto be an
abductive process on a backgroundtheory about the world.
Basically, abductionis the process of adopting hypotheses to explaina set of facts accordingto a knowledge
theory.
Givena set of formulaeabout a certain field of knowledge
and a set of observations, the task of the abductiveinference is to supposethe causesof these observationsfromthe
knowledgeavailable. Abduction,thus, is a non-monotonic
inference (Boutilier &Becher1995) since the explanation
inferred from the available knowledgemaycomeout to be
false providednewinformationis acquired.
Takinginto account the formal systemdescribed in the
previoussection, the task of the abductiveprocessis to infer the conclusionsof formulae[.41] to [.46] as hypotheses,
given a description (observation)of the sensor data in terms
of depthpeakstransitions.
Moreformally, assumingthat ~ is a backgroundtheory
comprisingformulae[A1] to [.46] and ¯ a description (in
terms of depth profiles) of a sequenceof stereo images,the
task is to find a set of formulaeA, suchthat
r~,A~,
[.46] Vabuttotally_occluding(a, b, u, t) A (a # b)
3h V q( t a <t) ^ occluding(a,
b, u, tx
^peak_of(q, b, u) ^ (size(q, t)
The formulae[A1] to [A6] represent a set of weakconnections betweendepth peak transitions and dynamicrelations
betweenobjects and betweenthe observer and then objects.
By weakconnectionswe meanthat some(but not all) of the
hypothesesto explain the sensor data are representedwithin
the formulae. This set of hypotheses, however, does not
exhaust all of the possible configurationsof the objects as
noted by each sequenceof snapshots(as briefly discussedin
the example1 above). The purpose of this incomplete set
of hypothesesis, initially, to give a hint aboutwhatpossibly couldbe a high-levelexplanationfor the sensor data this
high-level interpretation could then be used by a planning
systemin order to give a possibly executableplan.
Asa matter of fact, there are twowaysof readingthe formulaeabove. Firstly, if the fight-hand side of one of these
formulaeunifies with a logic description of the sensor data,
then the predicates in the left-hand side of it should be inferred. Dueto the fact that the set of hypothesesis not complete, this inference process maylead to false conclusion,
that can be reviewedif newdata is available. For this reason
we assumeabduction as the inference rule. A second way
41
(I)
where
thesymbol
l~refers
tothenon-monotonic
logic
consequence.
In order to makethis clearer, examples1 and 2 are recalled using the formal languageand the concept of abduction presented above.
ExamplesRevisited
Example1: Approachingan Object Consider the profile sequencein figure 3. A description of the sensor data
described by the transitions betweenthe peak p in P1 and
P2 is the set
(3p a u tl t2 peak_of(p,a,u)^
= ~ (size(p,
t,) < size(p, t2))A
I, ( depth(p,tl ) >depth(p,t2
Wherepeak_of(p, a, y) is the result of the default assumptionthat every peak represents a physical body.
/,From ¯ and the formula [A1], abduction infers that
being_approached_by(y,a, t) or approaching(u,a, t) or
expanding(a, u, t) for sometime point t E It1,... ,t2].
Consideringthe formula (1) in the previous section, the
set {being_approached_by(u,
a, t ), approaching(u,a, t
expanding(a,u, t)} constitutes the set of explanationsA.
Example2: Occlusion between two objects Similarly to
the example1, a description of the profile sequencerepresentedin figure 4 can be written as the set
the gap betweenvision and planningrely on the use of special purpose algorithms or on the developmentof a common
language,instead of first-order logic, to solve this issue. A
limitationof the first approachis that it treats visual interpretation and planningas twodistinct processes, while the
present workassumesthat they can be handled by a similar
abductive mechanism,as proposed in (Shanahan1996).
the other hand, by assumingthe secondoption, the developmentof a common
languagedistinct from logic mayhave to
cope with most problemsthat were already solved through
the longtradition of logic-basedsystemsfor A.I.
In this workthe simplification of the stereogramsin terms
of horizontalcuts mayseemto be verylimiting at first sight.
However,
it guaranteedthe development
of a qualitative spatial reasoningtheory intrinsically related to sensor information. The core purposeof this ongoingresearch is to investigate howmuchof a spatial reasoning theory can be extracted from poor sensor information, concludingfromthat
whatkind of robotic tasks can be accomplishedwithin this
theory.
Extendingthis one-dimensionalview of the scene to a
moregeneral analysis could be doneby consideringthe joint
information given by depth profiles of cuts madein other
directions of the scene. This analysis maylead to a better
notion of individual objects and the degree of connectivity
betweenobject. This issue, however,is left for future research.
Anotherissue that was overlookedby the present paper
due to time constraints wasthe considerationof the information encodedby the format of the depth peaks. Assuming profiles taken frommanydifferent points of viewaround
the object, the formatof these peaksare intrinsically related
to the shape of the bodies, and to the two dimensionalregion this object oecupyin the environment.Thus, the format of the depth peaks could play an important role in the
perceptualsignature of the objects (Coradesehi&Saffiotti
2000) and to theories about spatial occupancyand persistence (Shanahan1995).
Afurther subject for future researchis the improvement
of
the representationalsystemas moreprecise and richer visual
informationis considered.
Future workshould also investigate the possible transitions betweenthe relations 1. to 12. (describedin the section
Peaks, Attributes and Predicate Grounding).This information wouldbe useful for constraining the possible explanations in the abduetivetask of sensordata assimilation.
Theconsiderationof default rules in the theory is another
important open problemworthy mentioning.
In the section Peaks, Attributes and Predicate Grounding, the connectionbetweenthe symbolicand the physical
representation of the objects in the worldis defined by the
predicate peak_of~3. The statement peak.o f fp, a, v) can
be interpreted in terms of anchoringas "the anchorp is assigned to the object a fromthe viewpointv". It is the task
of the abductiveprocessto maintainthis anchorin time. For
instance, recalling the profile P4 in the example2 (figure
4), whereonly one peak is shown, and supposingthat in
sequential profile P5 another peak appears next to peak q,
the reasoningsystemshould concludethat this newpeak is
’3ab01 02tl t2 t3 t4 v tl < t2 A t2 < t3A
t3 <t4 A peak_of(a, 01, !/) A peak_of(b, 02, v)A
( dist( a, b, h) > dist( a, t2)) ^ -~connected( a,b, h)
^-~eonneeted(a, b, t2) ^ connected(a,b, t3)^
Vt q [h, t4] (depth(a, t) > depth(a, t))^
size(a, t4) =
/,From ~’ and the set of formulae I~ (as defined in the
previous section), an abductiveexplanation for ~ wouldinelude someof the followingrelations:
’getting_closer(a, b, v, t)
!m
A tl
<~ t A 1~ <~ t2
circling(v, a, b, t) A h < t A t <
occluding(a,b, v, t3)
, totally_occluding(a,b, v, t4)
Image segmentation:
future plans
This work assumes a bottom-up approach to image segmentation. Theimplementationof the systemis in its very
early stages. Upto nowthere is an edgedetection task followedby a region segmentation(and labeling) step on the
stereograms.Therefore,depth profiles are going to be constructed from the vertical edges extracted fromthe imageof
the scene.
Thecentral idea is to hypothesisethe existenceof objects
fromthese imageregions, and proposetests in order to verify the hypothesesor to search for morecompleteexplanations wheneverit is needed.This necessity in searchingfor
more complete explanations should be decided by a planning systemcapable of handling priorities within the hypotheses. This issue, however,is outside the scopeof this
paper.
Discussion and Open Issues
This paper proposeda symbolicrepresentation of the data
from a mobilerobot’s stereo-vision systemusing depth informationand dynamicnotions relative to a viewpoint.
The symbolicrepresentation proposedis based on a horizontal cut of the imagegiven by the stereo-vision system.
Transitions in the depth profiles were, then, linked to highlevel descriptions of the environmentby first-order axioms.
The mainpurpose of this workis to developa mechanism
of
inference to concludehypothesisabout the relative motion
betweenobjects, spatial occlusion and objeet’s deformation
fromsensor data transition. This relationship betweenspatial events and their effects in the depthprofile transitions
constitutes a backgroundtheory for a logic-based abduetive
processof sensor data assimilation.
The reason for assuminga logic-based approachin this
workis to assumea solid common
language for visual data
interpretation and task planning. Otheroptions for bridging
42
the peakio (previously involvedin the profile sequenceP1,
P2, P3 and P4), maintainingthe previously stated connection betweenp and the object a. This fact can be concluded
assuminga default rule about the permanence
of objeeLs,another importantopen issue of this work.
The connection between the depth profile representation and the Region Occlusion Calculus (ROC)(Randell,
Witkowski,&Shanahan2001), as mentionedin the introductionof this paper, is also an interesting topic for further
investigation. Themaincontributionof investigating the relationship betweenthe RegionOcclusion Calculus and the
framework
presentedin this article is the possibility to extend ROCincluding dynamicsensor information in its ontology.
Acknowledgments
Thanks to David Randell and MarkWitkowskifor the invaluable discussions and to the two anonymousreviewers
for the useful suggestionsfor improvingthis paper.
References
Boutilier, C., and Beeher, V. 1995. Abductionas belief
revision.Artificial Intelligence.
Brooks, R.A. 1991a. Intelligence without reason. A.I.
Memo1293, MIT.
Brooks,R. A. 1991b.Intelligence without representation.
Artificial Intelligence Journal47:139-159.
Coradesehi,S., and Saffiotti, A. 2000. Anchoringsymbols
to sensor data: preliminaryreport. In Proc.of the 17thNational Conferenceon Artificial Intelligence (AAAI-2000),
129-135.
Hahnel, D.; Burgard, W.; and Lakemeyer, G. 1998.
GOLEX
bridging the gap between logic (GOLOG)
and
real robot. LNCS.Springer Verlag.
Harnard, S. 1990. The symbolgroundingproblem. Physica
D 42:335-346.
Racz, J., and Dubrawski,A. 1995. Artificial neural networkfor mobilerobot topological localization. Journalof
Robotics and AutonomousSystems 16(1):73-80.
RandeU,D.; Witkowski,M.; and Shanahan, M. 2001. From
imagesto bodies: modelingand exploiting spatial occlusion and motionparallax. In Proceedingsof the International Joint Conferenceon Artificial Intelligence. Toappear.
Shanahan,M. 1995. Default reasoning about spatial occupancy.Artificial Intelligence 74(1): 147-163.
Shanahan, M. 1996. Robotics and the commonsense informatic situation. In Proceedingsof the 12th European
Conferenceon Artificial Intelligence. JohnWileyand Sons.
Shanahan, M. 1997. Solving the frame problem. TheMIT
press.
Stock, O., ed. 1997. Spatial and TemporalReasoning.
KluwerAcademicPublishers.
van Benthen,J. 1991. TheLogic of Time: a model-theoretic
investigation into the varieties of temporalontologyand
temporal discource. KluwerAcademic.
43