From: AAAI Technical Report FS-02-03. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved.
Using Discourse to Modify Control Procedures
Pete Bonasso
Texas Robotics & Automation Laboratories (TRACLabs)
1012 Hercules, Houston, TX
r.p.bonasso@jsc.nasa.gov
Abstract
We outline recent discourse work using a shared plans
approach to modify control procedures for advanced life
support systems. This effort was motivated during a recent
water recovery test at NASA by a need to temporarily
suspend automatic shutdown responses in the 3T control
system while the crew conducted manual procedures.
Discourse plans are reactive procedures executed in the
RAPs reactive planning system. The parser generates
descriptions of concepts in the memory of the control
system. Discourse management runs concurrently with the
control system and can handle a variety of interruptions and
non-sequitors.
Introduction
For a number of years we have been developing artificial
intelligence control systems for advanced life support
(Schreckenghost et al 1998, Bonasso 2001). These
systems, built with the 3T control system (Bonasso et al
1997), were for the most part autonomous. Based on an
increasing need to accommodate variable autonomy,
however, we augmented our control system with a
discourse management component called the Dynamic
Predictive Memory Architecture (DPMA) (Fitzgerald &
Wiseman 1997). DPMA parses an utterance not lexically
but conceptually based on phrasal patterns in the control
system memory in order to recognize relevant knowledge
structures and to use those structures to identify action and
sensing requests. With DPMA, discourse plans can be
constructed using the procedure language of the control
system, the RAPs system (Firby 1999).
Using DPMA in a recent water recovery environment we
have been able to provide users with a more flexible
interface to the control system, one that uses interactive
discourse plans to guide the user into the concept space of
the control system (Bonasso 2000).
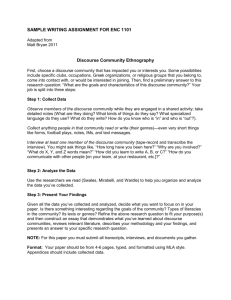
The advanced water recovery system (WRS) (see Figure
1) developed at Johnson Space Center (JSC) is comprised
of 1) a biological water processor (BWP) to remove
organic compounds and ammonia, 2) a reverse osmosis
(RO) system to remove inorganic compounds from the
effluent of the BWP, 3) an air evaporation system (AES) to
Copyright © 2002, American Association for Artificial Intelligence
(www.aaai.org). All rights reserved.
recover additional water from the brine produced by the
RO, and 3) a post processing system (PPS) to bring the
water to within potable limits. From January 2001 through
April 2002, the 3T system controlled the WRS
autonomously in a continuous 24/7 integrated test.
Toward the end of that test, it became necessary for life
support engineers to perform certain manual maintenance
tasks that would inadvertently trigger automatic shutdown
(ASD) procedures in the autonomous control system. Thin
tubes in the nitrifier assembly would periodically become
clogged with biomass and require the engineers to
manually purge them. During the manual purge, the
pressures in the tubes would drop below the minimum
pressure being maintained by 3T, causing an automatic
shutdown of the nitrifier water and air pumps for the
affected tubes. As a temporary solution, we commented out
the action part of the ASD in the code, leaving only the
warning output. After the maintenance procedure, we
uncommented the code.
Anticipating similar requirements in the future, we
developed a set of discourse plans to allow the engineers to
interactively modify any procedure which might be
affected by manual tasks.
Our Approach to Interactive Procedure
Modification
We take as our theoretical model of discourse the Shared
Plans (SP) approach (Grosz and Sidner 1990). Because we
had at our disposal a reactive planning engine in the RAPs
system, we were able to implement a modified version of
the algorithm developed by Lochbaum (Lochbaum 1998)
to manage SP discourses.
RAPs (reactive plans) that carry out the SP processing
use the RAPs agenda to represent the discourse segments
and their interrelationships and a pushdown stack to hold
the objects and data associated with each segment. We use
the term discourse management (DM) to include the stack
and the set of RAPs used to manage the dialog.
The DPMA parser transforms a given user utterance into
a description of a language concept in memory, e.g., an
object or a speech act. When the DM enters into a dialog
with the user, each DM query sets up a monitor task to wait
for the class of response expected. For example, the DM
question “Which temperature sensor are you referring to?”
sets up a monitor expecting the response to be a description
of an instance of the class of temperature sensor. The
collection of event monitors and their associated SP
processing RAPs comprises the DM’s expectations of the
user’s next utterance. When a user response is detected,
one of the event monitors will trigger, allowing the
continued development of the SP. If no event triggers, the
utterance represents the user’s desire to do something new
and processing of a new SP is begun.
Manual Feed
Biological Water
PT
Processor
RO
Feed
PT
RO
Product
Scale
PB
LS
Inoculation
Tank
Scale
Drain
Drain
Reverse Osmosis
GLS
Main Feed
TankTank
Feed
TK-FS-04
(ref)
Sample
Sample
Nitrifier
Gas
Sample
c
Sample
Sample
Sample
WS-FS-02
Facility
Drain
Sample
Facility
air
Facility
Drain
Facility
Drain
Gas
Sample
Air Evaporation
Gas
Sample
LS
MCV
Gas
Sample
Sample
MCV
Scale
Overflow
Tank
Facility
Drain
Product
Tank
LT
Facility
Drain
Sample
Post Processor
Sample
Scale
Sample
Scale
Manual
Feed
PPS
Feed
WQM
MCV
Facility
Drain
Drain
Scale
Sample
Figure 1 The Advanced Water Recovery System (WRS)
Until there is enough information for the discourse
manager to invoke a RAP (recipe) to carry out the speech
act, the SPs are only partially shared plans (PSPs). For
example, the user may have asked the value of a
temperature sensor in a heater, but there is more than one
temperature sensor and the discourse manager will need
clarification. The SP processing terminates for a PSP when
a recipe to carry out the desired action -- also known as an
individual plan, or IP -- can be successfully invoked. The
SP becomes fully shared (FSP) at this point since the
control system understands and concurs with the user’s
intentions and needs no further information to carry out the
task. We call IPs action RAPs. Action RAPs already exist
for the control system, e.g., "Turn on the feed pump.", or
can be developed for adjusting the control system, as in the
case of procedure modification.
Finally, the SP RAPs usually make a last query to the
user to insure that the action taken has indeed had the
desired effect and the FSP is terminated. If the desired
effect was not obtained, a new PSP is established for the
same speech act and SP processing continues.
Flow of Control
Figure 2 shows the general flow of control for SP
processing. "Service" is a general reference to an act that
can be taken by the control system without further SP
dialog. A user utterance either via text or point-and-click
USER
mode can be a speech act to perform an action, a request
for data, an assertion of data or a response to a DM query
for more information. Affirmative and negative answers
are common to a number of queries such as “Do you mean
the downstream transducer?” as well as “Is this the
information you requested?”
Invoke RAP (IP)
Set up monitor
Service
Make request
GUI
utterance
Speech act:
-perform action
-request data
-assert data
Need more info (PSP)
Need user action (IP)
Make request
Set up monitor
Make request
Set up monitor
Service
Answer
- yes/no
- forget it
- start over
- answer
Don t understand
NOTIFICATION
Figure 2: Shared Plans Processing
But the user can also change his mind about doing the
task as in “forget it” or “never mind”, as well as start the
SP processing over again when he sees that the discourse
direction is not to his liking. The user can also start up a
new SP at anytime, since the RAP engine is designed to
manage multiple reactive plans simultaneously (e.g., the
DM runs concurrently with RAPs that control the physical
system).
Speech acts can generate the invocation of an action
RAP directly if the utterance and the state of affairs as
understood by the DM contain all the information needed
to carry out the action RAP. In these cases, the DM puts
the action RAP on the agenda and a monitor is set up to
watch for the desired effect. Additionally, the action RAP
may require the user to execute a step in the recipe (a user
IP), such as turning on a piece of equipment or entering an
authorization code in a pop-up window. In these cases the
user acts as a control agent and the action RAP sets up
monitors to watch for the result of the user action.
If there is no recipe for the action, the SP fails and the
user is notified accordingly. If the action RAP cannot be
invoked because of missing information or the need for
clarification, the user is asked for the missing information
or clarification and a monitor is invoked to wait for the
user’s response.
Finally, the parser m ay fail to produce a description from
the user’s utterance. As mentioned earlier the issue here is
one of guiding the user into a corpus of discourse
circumscribed by the knowledge bases of the DM, which in
turn is dependent on the set of RAPs and memory concepts
for the given application. Our system searches the
utterance for any subset of words that match a memory
concept and responds with a guess at what the user
required. Failing this, our system displays a list of
suggested utterances (see Bonasso 2000).
An Example Procedure Modification
In this section, we provide an annotated transcript of a
dialog taken from a session in which the user wishes to
prevent the shut down of a pump when the pressure is too
low. Procedure modification involves finding the task step
in a relevant RAP and modifying it according to the user’s
desires. In this session, the user 1) starts over in the middle
of the modification process, 2) asks an unrelated question,
3) decides the final deletion isn t to her liking and 4)
eventually abandons the task altogether.
12/04 14:16:46 - I want to modify a procedure
12/04 14:16:51 - USI: There is more than one procedure that I
could modify. Which are you referring to?
[Note : lines with the USI : tag are from the DM].
The user believes a recipe for modifying a procedure exists
in the RAP library because in our implementation there is a
GUI display of suggested utterances the user might employ
while interacting with the system, one of which is “I want
to modify a procedure.” In order to clarify the general
reference to “a procedure”, the DM prompts the user and
sets up a monitor to watch for an utterance describing an
instance of a procedure.
12/04 14:17:09 - How many BWP procedures are there?
12/04 14:17:31 - USI: There are 19 procedures. I will list them.
[The DM lists the procedures one of which is named by the string
“handle bioreactor alerts”.]
12/04 14:17:37 - USI: There is more than one procedure that I
could modify. Which are you referring to?
12/04 14:18:11 - handle bioreactor alerts
The monitor to watch for an utterance describing an
instance of a procedure is still active and the DM refreshes
its request to the user. This monitor will eventually time
out if the needed parameters cannot be obtained in a
reasonable amount of time.
12/04 14:18:22 - USI: Here are the methods for handle bioreactor
alerts :
NITRIFIER-PROBLEM-FIXED
NITRIFIER-PRESSURE-LOW-MARK
NITRIFIER-PRESSURE-LOW-STOP-PUMP
NITRIFIER-PRESSURE-HIGH
NORMAL
Which one do you want to modify?
At this point the DM is working on an SP to glean from the
user the parameters necessary to carry out a modification
on the identified procedure. Two RAPs are active, one to
interactively prompt the user for the parameters, and
another to invoke the modify RAP when all the parameters
are obtained.
12/04 14:18:48 – nitirifier-pressure-low-stop-pump
12/04 14:18:49 - USI: I understand you wish to modify the
NITRIFIER-PRESSURE-LOW-STOP-PUMP method. Here are
the tasks for nitirifier-pressure-low-stop-pump method.
task-net
sequence
Step t1 is NITRIFIER-TUBE-FLOW STOP
Step t2 is PUT-OUT-PBBWP-WARNING
Do you want to add to, delete or change the NITRIFIERPRESSURE-LOW-STOP-PUMP method?
12/04 14:22:19 - start over
12/04 14:22:19 - USI: Okay, I'll start over.
12/04 14:23:02 - USI: Here are the methods for handle bioreactor
alerts <previous listing omitted>
12/04 14:23:05 - USI: Which one do you want to modify?
The class of user response at 14: 22: 51 did not match any
current expectation of the DM. Thus a new SP (an FSP,
since the DM understood the intent of the speech act and
knows a recipe for carrying out that act) is begun to answer
the user’s new query. Once that SP is completed, the
original SP processing continues. The RAPs planning
engine handles all of the refresh/interrupt details for
interleaving reactive plans.
12/04 14:23:14 – nitirifier-pressure-low-stop-pump
12/04 14:23:16 - USI: I understand you wish to modify the
nitirifier-pressure-low-stop-pump method. Here are the tasks for
nitirifier-pressure-low-stop-pump method.
<previous listing omitted>
12/04 14:23:26 - USI: Do you want to add to, delete or change the
nitirifier-pressure-low-stop-pump method?
12/04 14:23:35 - delete
12/04 14:23:47 - USI: Which task do you want to delete?
12/04 14:23:54 - t1
12/04 14:23:55 - USI: I understand you wish to delete the t1 task.
12/04 14:23:58 - USI: Here are the new tasks for nitrifierpressure-low-stop-pump method.
task-net
sequence
Step t1 is NO-OP
Step t2 is PUT-OUT-PBBWP-WARNING
When the task was identified, the DM had all the
information needed to carry out the procedure
modification.
12/04 14:24:04 - USI: Are you satisfied with the delete
modification to the nitirifier-pressure-low-stop-pump method of
the handle bioreactor alerts rap?
12/04 14:24:14 - no
12/04 14:24:14 - USI: O.K. Here are the original tasks for
nitirifier-pressure-low-stop-pump method.
task-net
sequence
Step t1 is NITRIFIER-TUBE-FLOW STOP
Step t2 is PUT-OUT-PBBWP-WARNING
Since the modification is actually made on a copy of the
original procedure, a new SP is begun to undo whatever is
wrong.
12/04 14:22:23 - USI: Here are the methods for handle bioreactor
alerts <previous listing omitted>. Which one do you want to
modify?
12/04 14:22:51 - How many AES temperature sensors are there?
12/04 14:24:21 - USI: Which do you wish to re-select,
the task, the modification or the method?
12/04 14:24:31 – the method
12/04 14:24:34 - USI: Here are the methods for handle bioreactor
alerts <previous listing omitted>
12/04 14:24:37 - USI: Which one do you want to modify?
12/04 14:24:45 - forget it
12/04 14:24:46 - USI: Okay, I'll forget it.
12/04 14:22:57 - USI: There are 24 A E S system temperatures. I
will list them. <temperature sensor list omitted>.
"Forget it" signals the complete abandonment of the shared
plan. Memory variables are left in tact for when the user
The DM deletes the parameters for the SP obtained thus far
and begins again.
wants to "try again", in which case the SP processing picks
up where it left off, or the user can "start over".
The above interaction takes place on-line while 3T is
controlling the WRS. When the modifications are
completed, at the next cycle of the RAPs agenda, the new
procedure is invoked. After that, during the maintenance
operations, 3T displays the low-pressure warning but takes
no action. When the maintenance operations are complete,
the user requests that the original procedure be restored. If
a low-pressure situation occurs subsequently, the ASD will
trigger. A laptop demonstration of the entire interactive
procedure modification and control system responses is
available.
ASTRONAUT:
Discussion
ASTRONAUT:
WRS:
From the example dialog shown (and others which space
does not allow) we believe two tentative conclusions can
be drawn . First, the DPMA system is a viable candidate
for a discourse management engine. It not only provides
for easily devised and adjustable discourse plans, but also
allows the interweaving of those plans with domain plans.
Second, our streamlined shared plans processing approach
as outlined in Figure 1, is a useful model of humanmachine interaction, where the machine is considered a
kind of idiot-savant and the user must be guided into areas
of discourse related to what the machine knows.
The implications of being able to modify the procedural
reasoning of an agent, while the agent is "on-line" are
many, ranging from the ability to make temporary changes
during a development tests to modifying a procedure in a
deployed system after learning more about the
environment. During our efforts in the integrated water
test, there were several cases similar to the given example
where we were asked to temporarily suspend automatic
shutdowns due to crew intervention. Instead of building
and integrating ad hoc interface buttons for the user,
procedure modification discourse would have been less
costly and the users could be trained to follow the
discourses themselves.
One can also imagine a possible scenario on a manned
outpost on Mars. The WRS control system has been
programmed to shutdown the biological water processor
(BWP) using the following procedure:
1) Turn off the effluent pump
2) Turn off the feed pump
3) Turn off the recycle pump
4) Close the recirculation valve
Later, the crew determines that the normally open air vent
from the gas liquid separator (GLS) tends to clog during
dust storms and needs to be closed as part of the shutdown
procedure. With the DPMA discourse management system,
the following dialog would eventually be possible, via
either keyboard or voice.
WRS:
ASTRONAUT:
WRS:
ASTRONAUT:
WRS:
WRS, I want to change the BWP shut down
procedure.
Okay. I have located the BWP shut down
procedure. (Procedure steps are displayed
in text)
After you close the recirculation valve,
close the air valve.
I am not familiar with the air valve. Here is
a list of the BWP valves. (A list with names
known by the system is shown.)
Which one are you referring to?
The GLS vent valve.
Okay. I have added the step, close the GLS
vent valve. (The new procedure is
displayed in text.)
Anything else?
No.
Okay.
We have not yet conducted user trials, but we have given a
laptop demonstration of this system to a number of both
knowledgeable and naive users. In all cases the users
understand the concepts and what we are trying to
accomplish, but report that there is more of a learning
curve to understand the procedure structures than to
understand how the discourse plans operate. These
preliminary results point to a need for more graphical
representations of the procedures and their methods.
References
Bonasso, Pete. 2001. Intelligent Control of a NASA
Advanced Water recovery System, in Proceedings of The
6th International Symposium on Artificial Intelligence,
Robotics and Automation in Space: A New Space Odyssey,
Montreal, June.
Bonasso, Pete. 2000. Teaching Humans to Talk to Robots,
in Working Notes of the AAAI Spring Symposium on
Natural Dialogues with Practical Robotic Devices,
Stanford, March.
Bonasso, Pete, Firby, R.J., Gat E., Kortenkamp, D., Miller,
D. and Slack, M. 1997. Experiences with an Architecture
for Intelligent, Reactive Agents, in Journal of
Experimental and Theoretical Artificial Intelligence, 9,
237-256.
Firby, James R.. 1999. The RAP System Language
Manual, Version 2.0 Neodesic, Inc., Evanston, IL.
Fitzgerald, W. and Wiseman, J. 1997. Approaches to
Integrating Natural Language Understanding and Task
Execution in the DPMA AERCam Testbed, Neodesic, Inc.,
October.
Grosz, B. and Sidner, C. L. 1990. Plans for Discourse. In
Cohen, Morgan, and Pollack, editors, Intentions and Plans
in Communication and Discourse. MIT Press.
Lochbaum, Karen E. 1998. A Collaborative Planning
Model of Intentional Structure. Computational Linguistics
24 (4): 525-572.
Schreckenghost, D., Bonasso, P., Kortenkamp, D. and
Ryan, D. 1998. Three-Tiered Architecture for Controlling
Space Life Support Systems. IEEE Symposium on
Intelligence in Automation and Robotics. May.