From: AAAI Technical Report SS-03-02. Compilation copyright © 2003, AAAI (www.aaai.org). All rights reserved.
Evolutionary Design of a Collective Sensory System
Yizhen Zhang1,2, Alcherio Martinoli1, and Erik K. Antonsson2
1
Collective Robotics Group, 2Engineering Design Research Laboratory
California Institute of Technology, 1200 East California Boulevard, Pasadena, California 91125, U.S.A.
yizhen@caltech.edu, alcherio@caltech.edu, erik@design.caltech.edu
Abstract
In this paper, an original automatic design synthesis
methodology based on evolutionary computation is
proposed for designing and optimizing distributed embodied
systems. To validate the efficacy of this evolutionary
design methodology, it was applied to an initial case study
concerned with the configuration of a collective sensory
system for intelligent vehicles. Results are presented from
simulations at different levels of abstraction and different
traffic scenarios. The proposed method is able to synthesize
novel design configurations according to engineering design
needs and is expected to tackle more complex problems.
Introduction
Design has traditionally been a creative process that
requires human ingenuity and experience. When the
design of intelligent vehicles which must assist a human
driver to improve traffic safety and fluidity is considered,
the design task is highly complex and characterized by
severe reliability requirements. The main challenges
include, but are not limited to, the following difficulties: 1)
high, or sometimes even a priori unknown, complexity of
good design solutions; 2) multiple objectives, competing
factors, trade-offs and/or simultaneous hardware and
software optimization requirements; 3) the evaluation
process and result for a given design solution can be
intrinsically dynamic and stochastic instead of static and
deterministic, especially in traffic scenarios. All these
problems make it difficult for an engineer, using traditional
engineering methods, to find a good design solution for
complex systems such as a traffic system.
Natural evolution has been an inspiration for
engineering design researchers to develop automatic design
synthesis methods able to cope with the difficulties
mentioned above.
In this paper, an evolutionary
computation methodology (Martinoli, et al., 2002) is
proposed for designing and optimizing distributed
embodied systems. This method is platform-independent,
system-oriented, off-line but realistic enough to be
transported to real hardware. In comparison to traditional
hand-coded design, the human engineering effort involved
is minimized to the mathematical formulation of desired
performance and to the encoding of real problems in the
search space of the algorithm. Selection of algorithmic
Copyright © 2002, American Association for Artificial Intelligence
(www.aaai.org). All rights reserved.
parameters is also up to the engineer but usually the
evolutionary algorithms are not very sensitive to the initial
settings. Heuristic criteria based on experience are usually
applied to perform these choices. As a first case study, the
problem of designing a collective sensory system for
intelligent vehicles is considered.
In the following sections, evolutionary computation
methods are introduced, along with approaches to adjusting
the canonical evolutionary algorithms to meet the needs of
engineering design of distributed embodied systems. The
encoding of a given sensory solution is presented next,
with the simulation tools employed and the fitness function.
A few sample results obtained in the framework of this
first case study are discussed, including an outline of the
limitations of the proposed methodology. The paper
concludes with a brief discussion of future promising
research directions.
Evolutionary Methodology
Since the 1960’s, there has been an increasing interest in
simulating the natural evolution process to solve
optimization problems, leading to the development of
evolutionary computation (EC) methods (Goldberg 1989,
Mitchell 1996) such as genetic algorithms (GA), genetic
programming (GP), and evolutionary strategies (ES). The
idea is to have a pool of candidate solutions evaluated in
parallel, from which the “fittest” solutions are chosen to
mate and breed new candidate solutions using stochastic
operators. This procedure is iterated until the population
converges or a preset condition is met.
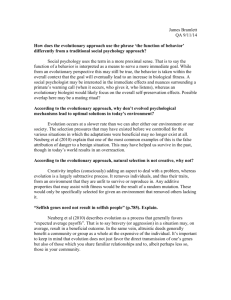
Based on GA and ES, the evolutionary optimization
loop used here is shown in Figure 1. First, the initial pool
of solutions is generated randomly. Then each individual
is evaluated under an evaluation test for one evaluation
span. According to the evaluation results, i.e. the fitness of
each individual, the parent selection scheme will choose
pairs of parent solutions for crossover, promoting
individuals with higher fitness. Crossover between the
selected pairs of parents is conducted under certain
crossover probability to generate pairs of offspring.
Mutation is also applied to each gene of the original pool
under certain mutation probability and generates more
offspring. If the fitness is deterministic, then only the
offspring (from both crossover and mutation) is evaluated,
otherwise the original pool is also re-evaluated. The best
individuals are then selected from both the original pool
and the offspring, i.e. elitist generation selection, to
constitute the next generation. Hence an offspring will
only replace an individual of the original population if it
has a higher fitness. At the end of each generational loop
the program verifies whether or not another generation is
needed in order to meet a pre-established criterion for
terminating the evolutionary run.
static and hence a single evaluation suffices. However, it
is more computationally efficient than systematically
evaluating all offspring for a constant number of times,
since more computational power is reserved for more
promising solutions that survived over multiple
generations. In order to assess the best individual at the
last generation, a fair final test is performed consisting of
100 evaluation spans on all distinct individuals in the final
population and again the worst result is taken to be an
individual’s final fitness.
Case Study
As a first case study, the evolutionary method was applied
to a simple problem in a complex (dynamic and noisy)
environment. The goal is to determine the optimal
configuration (such as number, types, and placement) of
proximity sensors on an intelligent vehicle, in order to
monitor a pre-established detection region around the
vehicle in a realistic traffic scenario. The vehicles
considered here are circular and unicycle (i.e. single axis
with two motor wheels), and the detection region is also
circular, as shown in Figure 2. An object vehicle is
considered detected by the collective sensory system if the
vehicle’s body has overlap with at least one sensor’s
scanning area.
Encoding of Sensory Parameters
Figure 1: The evolutionary optimization loop used in the
automatic design synthesis process
The three challenges mentioned previously are all
addressed in this methodology. First, the encoding allows
variable-length chromosomes, making it possible to evolve
design solutions of suitable complexity (appropriate
number of design parameters) and optimize parameter
values simultaneously. The crossover and mutation
operators have to be adjusted from the canonical ones to
conform with the variable-length chromosome encoding,
which will be explained below. Second, various objectives
and competing factors can be carefully incorporated into a
fitness function with adjustable weights on each factor,
whose respective influence on the final design can be
easily examined. Third, when the evaluation process and
result is dynamic and stochastic, as characterized by real
traffic scenarios, solutions are selected based not only on
their one time performance but also on their robustness
through multiple re-evaluations, where the worst result
over an individual’s life span (the number of generations it
has survived, also the number of times it has been
evaluated) is considered to be a better estimate of its actual
fitness than a single evaluation. The selection here is
therefore based on individuals that have been evaluated
different numbers of times. This dynamic evaluation
approach is naturally more computationally expensive than
a canonical GA, where the fitness is often assumed to be
Sensors are mounted on the periphery of the vehicles, as
shown in Figure 2. The range, the cone of view, and the
position of the sensors as well as the number of sensors are
the parameters to be designed and optimized by the
evolutionary algorithm. Except for the number of sensors,
all the other parameters are encoded as real numbers. The
Figure 2: Sensor parameters and the detection region: the sector
shows a sample sensor’s scanning area.
position of each sensor is characterized by two angles: ϕ
(the angle between the front direction of the vehicle and
the radius pointing to the sensor’s mount) and θ (the angle
between the radius pointing to the sensor’s mount and the
center line of the sensor’s scanning area). The sensor
range ρ and cone of view δ are the other two sensor
parameters. With a total of four parameters for each sensor,
and for a collective sensory system with n sensors, the
individual would have 4*n parameters for no forced
symmetry (asymmetric) cases, and 2*n parameters for the
forced symmetry cases (where the sensor number n must
be even). Each parameter range is finite and discretized
into 400 intervals. Each sensor also has a cost factor that
depends on its range and cone of view. The sensors with
wider cone of views and longer ranges have a higher cost,
and the cost formula can be defined according to the reality.
As an important trade-off factor in the engineering design
process, the cost is included in the fitness function
explained below.
(a)
(b)
(c)
(d)
(e)
Figure 3: Graphical representation of the static test (a), the 1D (b)
and 2D (c) quasi-static tests, and the 1D (d) and 2D (e) full
coverage tests. The test vehicle lies at the center and the object
vehicles are distributed on the periphery ring (for static and 1D
experiments) or full area (for 2D experiments) of the detection
zone.
Evaluation Tests
To understand the role of the noise in shaping the evolved
solutions and to find the best and most efficient simulation,
six different types of evaluation tests are considered in this
case study: static, 1D/2D quasi-static, 1D/2D full coverage,
and an embodied test. Figure 3 and 4 show the details of
the six evaluation tests. Static and full coverage tests are
deterministic tests with static fitness while quasi-static and
embodied tests are probabilistic tests, where a different
evaluation result (fitness) will be obtained from each
evaluation test for one given sensory configuration.
This seemingly simple case study problem reflects all
three main challenges mentioned before. First, the optimal
number of sensors is unknown; hence the number of design
parameters is also open and increases with the number of
sensors in the solution. Second, the sensor cost and the
coverage of the detection region are two competing factors
here, whose relative importance lies in the fitness function
that leads to a trade-off between the two. Evolution of the
vehicle’s behavior/controller together with its morphology,
i.e. simultaneous software and hardware optimization, will
also be addressed in the future work, which is shown to be
more promising than evolving the behavior alone
(Balakrishnan and Honavar 1996, Bugajska and Schultz
2000). Third, the sensory configuration solutions are
evaluated in various evaluation tests characterized by
different levels of abstraction of real traffic scenarios,
including both static and non-static tests. Currently each
evolution only uses one evaluation test and the best
individuals discovered by evolutionary runs under different
evaluation tests are crosschecked by one form of test in the
end. In the future, different tests could be combined into
one evaluation span, following a hierarchical order of
difficulty of the tests.
Hence the computationally
inexpensive tests can be used to quickly eliminate the bad
individuals, saving more computational time and evolving
robust solutions.
Having 20 fixed object vehicles of the same size
distributed evenly on an external ring within the detection
Figure 4: Screenshot of the embodied simulator: Webots.
(a)
(b)
(c)
(d)
Figure 5: 1D (a,c) and 2D (b,d) PDFs generated from the vehicle occurrence data collected in the embodied Webots simulation for
accumulative 5000 evaluation spans. The vehicles were characterized by different cruising speeds and different initial positions for each
evaluation span. And they were either not allowed to change lanes (a,b) or allowed to do so (c,d). The front of the vehicles is at 0°/360°
in (a,c) and x=0, y > 0 in (b,d); while the back is at 180° in (a,c) and x=0, y<0 in (b,d).
zone, the static test (Figure 3a) is computationally the least
expensive test, but is quite different from the actual traffic
scenario. On the other hand, the embodied test, performed
using Webots, a sensor-based, 3D mobile robot simulator
(Figure 4, refer to www.cyberbotics.com), is currently the
most realistic level of simulation but is at least three orders
of magnitude more computationally expensive than the
simplest static test. Table 1 shows the approximate relative
time cost of the six types of evaluation tests. Sample
traffic scenarios are simulated in Webots, where the
simulated robots are the test and object vehicles considered.
The sensors and actuators simulated are characterized by
realistic noise values. Simple but realistic driver behaviors
are implemented for each vehicle with different cruising
speeds and random initial positions for each evaluation
span. The drivers are either allowed to change lanes, or
not, characterizing the two different traffic scenarios
simulated.
Currently the driver behavior is always
attentive and reactive: they maintain a safe distance in
front of the vehicle, keep the vehicle in the lane, and
change lanes only when it is safe and they are allowed to
do so.
The one-dimensional (1D) and two-dimensional (2D)
quasi-static and full coverage tests are based on the 1D/2D
probability density functions (PDFs) (see Figure 5)
generated from the vehicle occurrence data collected in a
more expensive (computationally and/or financially) and
realistic environment for a sufficiently long period of time,
such as the embodied simulation or real road tests.
Currently the PDFs used were generated from the data
collected from the embodied simulation for 5000
evaluation spans. Only the approaching angle of the object
vehicles is considered in a 1D PDF, while the relative
distance of the approaching object vehicle is additionally
considered in a 2D PDF. In quasi-static tests, the PDF is
used to generate the random occurrences of object vehicles
on an external ring (1D, Figure 3b) or multiple concentric
rings (2D, Figure 3c) within the detection region. In full
coverage tests, the object vehicles are placed
systematically along the external ring (1D, Figure 3d) or
multiple concentric rings (2D, Figure 3e) within the
detection region, while the same PDF is used to weigh the
fitness at each object position, as explained next.
Table 1: Approximate Relative Time Cost of the
Evaluation Tests
Evaluation Tests
Relative Time Cost
Static
1D Quasi-static
2D Quasi-static
1D Full Coverage
2D Full Coverage
Webots
1.0
9.4
77
4.1
257
6686
Algorithmic Parameters and Fitness Function
In this case study, a parent selection based on a roulette
wheel scheme, with an elitist generation selection, onepoint crossover, and a uniform mutation, was adopted. For
the variable-length chromosome cases, insertion and
deletion are also used as mutation operators, in addition to
the normal mutation, to change the lengths of
chromosomes. The one-point crossover had to be modified
to ensure proper crossover operation between parents with
chromosomes of different lengths.
One possible solution is to identify each gene in the
chromosome with a value chosen from a preset range, over
which the crossover point is randomly chosen and divides
the chromosomes into two sections to be swapped
according to the identifying values (Lee 2000). Another
solution is to introduce families of chromosomes, i.e. sets
of solutions with same number of genes, and crossover is
only allowed between members of the same family (Mark,
Polani, and Uthmann 1998). Since the latter method
restricts the crossover between two individuals of different
lengths, the principle of the first method was applied in this
case study.
In the sensory configuration case study, the parameters
belonging to one sensor can be considered as one gene in
the chromosome that encodes a collective sensory system.
The crossover point is taken randomly along the periphery
ring where the sensors are mounted, and the sensors of the
parents between the crossover point and the start point are
swapped in the crossover operation (Martinoli, et al., 2002).
Table 2: Algorithmic Parameters
Parameters
Population Size
Selection Scaling Factor
pcrossover
pmutation
pinsertion
pdeletion
Values
50
2
0.2
0.182
0.05
0.05
Table 2 presents the numerical parameters used in the
evolutionary algorithm. The probabilities of genetic
operators are fixed during an evolutionary run and are
calculated per genetic individual (chromosome).
The fitness function used is as follows:
Fitness = Cost*Coverage
n
Cost = max{1 − a ⋅
∑ cost ;0}
i
i =1
V
Coverage =
∑k
i
PDF(α i , ri )
i =1
where a is a weighting factor that decides the relative
weight of Cost and Coverage; n is the number of sensors
used in the current sensory configuration; costi is the ith
sensor’s cost, which is calculated based on the sensor’s
cone of view and range; V is the number of vehicles
effectively appeared within the detection region (i.e. their
centers were within the detection region shown in Figure 2)
during the evaluation span; ki is 1 if the object vehicle i is
detected, 0 if it is not.; and αi and ri are the angle and the
distance of the ith vehicle relative to the test vehicle. Under
the full coverage tests, the PDFs are those shown in Figure
5. Under all other test conditions, the PDF in the fitness
function is independent of the angle and distance, and is
therefore equal to 1/V for all possible cases.
Results
Evolutionary runs based on the static, 1D quasi-static and
1D full coverage tests were repeated 20 times with
different random number generator seeds and terminated
after 200 generations for each run; 2D quasi-static and 2D
full coverage evolutionary runs were repeated 10 times and
stopped after 200 generations; embodied evolutionary runs
were repeated 5 times and comprised 100 generations each.
These values were selected upon consideration of the
relative computational cost of the different levels of
simulation (refer to Table 1). The number of sensors is
either evolved by the algorithm or pre-established (in this
case, six sensors).
For the evolutionary runs with variable number of
sensors, the initial population has solutions with a
randomly chosen number of sensors from 1 to 20.
Figure 6 shows an example of an evolutionary run under
the 2D full coverage test based on the 2D traffic PDF
shown in Figure 5d, with forced left-right symmetry on the
configuration of the collective sensory system (the sensors
lying close to the symmetry axis itself are mirrored to the
opposite end as shown in Figure 7). Figure 6a shows the
evolution of the mean of the population fitness and its two
components (cost and coverage) over 200 generations,
while Figure 6b shows the evolution of the population
diversity, expressed by the mean and standard deviation of
each individual’s distance to the center of the mass of the
population at each generation. Note that the diversity plot
is omitted for the evolutionary runs with variable number
(a)
(b)
Figure 6: Example data of an evolutionary run of 200 generations with fixed six sensors under a 2D full coverage test based on a PDF
shown in Figure 5d with enforced symmetry on the sensory configuration. a) Evolution of the mean of the population fitness, cost and
coverage over generations. b) Evolution of the population diversity, expressed by the mean and standard deviation of each individual’s
distance to the center of the mass of the population.
(a)
(b)
(c)
(d)
Figure 7: The best phenotypes achieved by evolutions with
variable number of sensors and forced symmetry under 2D full
coverage test (a,b) and the embodied test (c,d). The 2D full
coverage test (a) and (b) are based on the 2D PDFs shown in
Figure 5b (lane-changing prohibited) and 5d (lane-changing
allowed) respectively. Accordingly, the vehicles simulated in the
embodied test are either prohibited to change lanes (c) or allowed
to do so (d). The sectors show the sensor scan areas; the small
solid circle at the center is the test vehicle considered and its front
is on the top of the picture; and the two (inner and outer) big dash
line circles show respectively the center line and outer edge of the
object vehicles that are on the outer edge of the detection region.
of sensors, since it is not straightforward to define the
center of mass for a pool of individuals of different lengths.
Figure 7 shows four samples of the best phenotypes at
the last generation of evolutionary runs under the 2D full
coverage test based on the 2D traffic PDFs and the
embodied test, both under lane-changing and non-lanechanging conditions. Note that the PDFs used in the 2D
full coverage test of Figure 7a and 7b were generated by
the corresponding embodied scenario used in Figure 7c and
7d. Only the cases with variable number of sensors and
forced symmetry on sensory configurations are shown here
due to the space limit.
It is interesting to notice that the evolved solutions are
quite similar under different traffic conditions: with and
without lane-changing, especially in the 2D full coverage
case. Although the best phenotypes shown here from the
2D full coverage evolution have six sensors, while the best
phenotypes evolved under the embodied simulation have
eight sensors, Figure 8 shows that they achieved
comparable performances in both the 2D full coverage and
embodied cross tests.
Figure 8 also shows a comparison of the performances
of the best individuals (and sometimes also the most
popular) at the last generation under different phenotypical
constraints (forced symmetry (Sym) on the sensory
configuration or not (Asym), fixed six (6) or variable
number (V#) of sensors) and under different final
evaluation tests. The 1D/2D quasi-static and full coverage
evaluation tests used the non-lane-changing 1D/2D PDFs
shown in Figure 5a and 5b respectively and the traffic
conditions in embodied simulations were the same as those
used to record the PDFs. In the histograms shown in
Figure 8, the height of a column represents the average
value, while error bars and triangular marks respectively
correspond to the standard deviation and the maximum
value over different runs with different random seeds of
the same evolutionary experiment.
(a)
(b)
(c)
(d)
Figure 8: Performance of the best individuals from different evolutionary runs at the last generation under various final tests. (a)
Individuals evolved under one specific evaluation test are tested under the same evaluation final test. (b) The number of sensors used by the
best individuals of the last generation in the variable number of sensors cases. Individuals evolved under each of the six evaluation tests
are then finally evaluated under the 2D full coverage test (c) and the embodied test (d).
Figure 8a reports the results of a “native” final test for
each evaluation form: for instance, if an individual was
evolved in a 1D quasi-static environment, the performance
plotted was recorded during a 1D final quasi-static test.
Note that for the deterministic evaluation tests (i.e. static
and full coverage tests), a final test is just a single
evaluation test (no need of repetitions); while for stochastic
evaluation tests (i.e. quasi-static and embodied tests), a
final test contains 100 evaluation tests and the worst result
is taken to be the final test result.
Figure 8b shows the number of sensors used by the best
individuals at the last generation and provides an
approximation of the optimal number of sensors under the
current variety of conditions. This is also the reason why
six was chosen to be the number of sensors in the cases of
synthesis with a pre-fixed number of sensors.
Figure 8c and 8d crosscheck the performance of
individuals evolved in different environments under the
same final evaluation. In Figure 8c all the best individuals
have been tested using the 2D full coverage test while in
Figure 8d all the best individuals have been evaluated
using the embodied final test in Webots.
It is interesting to notice that the two cross tests show
very similar trends for qualitative comparisons among
results from different evaluations, although the two tests
are quite different: one being deterministic with just a
single evaluation test and the other being probabilistic with
100 evaluation tests of expensive embodied simulations.
Moreover, the 1D/2D full coverage and quasi-static
evolutions achieved almost interchangeable performances
in most cases, with the 2D cases slightly better than the 1D
cases, although the PDFs are used quite differently in the
two types of evaluation tests, as explained before.
Furthermore, as expected, the static test is the simplest but
has the worst performances in the cross tests due to lack of
traffic information.
On the other hand, significant
differences are not observed between the results achieved
by the embodied evolution and other types of evolutions,
except for the static evolution. The results from 2D full
coverage and quasi-static evolutions almost always
outperformed the embodied one, which suggests that the
computationally expensive embodied test could be
replaced by simpler and faster evaluation tests without
compromising the performance of the evolutionary results.
In addition, Figure 8 also shows that enforcing
symmetry does not necessarily improve the quality of
performances achieved at the end of evolution. Enforcing
symmetry (and therefore reducing the search space to half)
usually only shortens convergence time but does not lead
to major difference in performance at the end of
evolutionary runs, since 100 or 200 generations is a long
enough period to discover good solutions in asymmetric
cases. In addition, major difference are not observed
between the performances achieved in the fixed 6 sensors
cases and the corresponding variable number of sensors
cases. Hence the exact optimal number of sensors does not
have to be known beforehand, the algorithm will discover
that. Finally, it is likely that there exist multiple good
solutions with different numbers of sensors that achieve
nearly the same level of performance in the evaluation tests,
as those shown in Figure 7.
Conclusion and Outlook
This paper presents an original automatic design synthesis
method based on evolutionary computation and validates
its efficacy on a case study concerned with the
configuration problem of a collective sensory system. The
canonical evolutionary algorithms have been modified to
fit the needs present in the modern design challenges and
to improve the computational efficiency. Several levels of
static and non-static simulations of two traffic scenarios
were introduced and sample data results were presented:
noisy and time-consuming, but realistic embodied
simulations can be apparently replaced by more abstract
and therefore computationally efficient simulations without
compromising the quality of the final results.
Although more work needs to be done to improve the
algorithm efficiency and to understand the role of noise
and simulation level on the final evolved solutions, the
results reported in this paper appear promising. The
proposed design synthesis methodology is expected to be
able to address more complex problems and challenges
faced by modern engineering design researchers. In the
near future, more realistic elements at the sensory and
vehicle level as well as more emergency traffic scenarios
will be introduced. More complex metrics and fitness
functions that involve the vehicle dynamics and traffic
safety will be developed and investigated. It is anticipated
that, when the number of design parameters is large and
when noise is involved, the evolutionary design could be
superior to traditional design methods in terms of solution
quality and engineering efforts.
Acknowledgements
This work was mainly supported by Delphi Delco
Electronic Systems. It was also supported in part by the
Engineering Research Centers Program of the National
Science Foundation under Award Number EEC-9402726.
References
Antonsson, E. K., and Cagan, J. eds. 2001. Formal
Engineering Design Synthesis. Cambridge, U.K.:
Cambridge University Press.
Balakrishnan, K. and Honavar, V. 1996. On Sensor
Evolution in Robotics. In Proceedings of the First
International Conference on Genetic Programming, 455460. Cambridge, Mass.: MIT Press.
Bugajska, M. D. and Schultz, A. C. 2000. Co-Evolution
of Form and Function in the Design of Autonomous
Agents: Micro Air Vehicle Project. In Proc. Workshop on
Evolution of Sensors GECCO 2000, IEEE.
Goldberg, D. E. 1989. Genetic Algorithms in Search,
Optimization, and Machine Learning. Reading, Mass.:
Addison-Wesley.
Lee, C.-Y. 2002. Efficient Automatic Engineering
Design Synthesis via Evolutionary Exploration. Ph.D.
thesis, Dept. of Mechanical Engineering, California
Institute of Technology.
Lee, C.-Y. and Antonsson, E. K. 2000. Variable Length
Genomes for Evolutionary Algorithms. In Proceedings of
the Genetic and Evolutionary Computation Conference,
806. Las Vegas, Nevada.
Lichtensteiger, L. 2000. Towards Optimal Sensor
Morphology for Specific Tasks: Evolution of an Artificial
Compound Eye for Estimating Time to Contact. In
Proceedings of the SPIE International Symposium on
Intelligent Systems and Advanced Manufacturing (Sensor
Fusion and Decentralized Control in Robotic Systems),
138-146. Boston, Mass.
Mark, A.; Polani, D.; and Uthmann, T. 1998. A
Framework for Sensor Evolution in a Population of
Braitenberg Vehicle-like Agents. In Proceedings of the
Sixth International Conference on Artificial Life, 428-432.
Cambridge, Mass.: MIT Press.
Martinoli, A.; Zhang, Y.; Prakash, P.; Antonsson, E. K.;
and Olney, R. D. 2002. Towards Evolutionary Design of
Intelligent Transportation Systems. In Proceedings of the
Eleventh International Symposium of the Associazione
Tecnica dell'Automobile on Advanced Technologies for
ADAS Systems. Siena, Italy.
Mitchell, M. 1996. An Introduction to Genetic
Algorithms. Cambridge, Mass.: MIT Press.