From: AAAI Technical Report SS-02-04. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved.
Automatic Synthesis
of Controllers for Distributed
Extended Abstract
Assembly
Eric Klavins
ComputerScience Department
California Institute of Technology
Pasadena, CA91125
klavins@cs.caltech.edu
Introduction
Weconsider the problemof controlling hundredsof robots
to performa task in concert. This problempresents many
fundamentalissues to robotics, control theory and computer
science. Witha great numberof robots, decentralization is
critical due to the cost of communication
and the needfor
fault tolerance. In decentralizedcontrol, each robot should
act based only on informationlocal to it. It then becomes
difficult, however,to guaranteeor even derive the behavior
of the entire systemgiven the behaviorsof the individual
components.In this paper we address this difficulty in a
novel way:Webegin with a specification of an assemblyand
develop methodsthat allow us to automatically synthesize
individual behaviorsso that they are guaranteedto produce
the desired global behavior.
Specifically, we consider the task of assemblingmany
disk-shapedparts in the plane into copies of a prescribed
assembly(formation), whichis specified by a graph. We
not allowthe parts to collide, makingthe task moredifficult
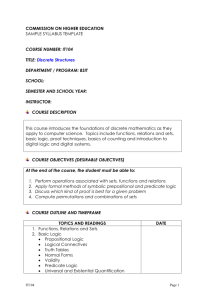
due to the non-trivial topology of the resulting 2n dimensional configuration space. As shownin Figure 1 we suppose that each part can moveitself and can play any role
in an assembly,whichmakesthe task particularly rich. We
first demonstratea meansof synthesizing from the specified assembly,a set of identical controllers for the parts to
run whichhave the net effect of movingthe parts to form
copies of the specified assemblywithoutcolliding. Theidea
is that parts shouldjoin togetherto into subassemblies
which
should in turn join togetherto makelarger assembliesand so
on.
In (Klavins 2002) we introduce algorithms, summarized
here, which perform the synthesis procedure described
above. These algorithms are deployed in simulation and
their performance is analyzed emperically. In (Klavins
2001), also summarizedhere, we give a proof of correctness of the algorithmwith respect to a discrete modelof the
dynamics.Weare currently attemptingto extend this proof
to the full hybrid dynamicsdescribedin (Klavins2002).
Related Research
Weare most strongly inspired by the work of Whitesides
and his group (Bowdenet aL 1999; Breen et al. 1999)
in meso-scale self-assembly. In this work, small, regular plastic tiles with hydrophobicor hydrophylicedgesare
4O
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a) Initialpositions
0
°-%...o
8
b) Final positions
Figure 1: The goal of the assembly problem. Each disk
shapedpart mustmovefromits initial position (a) to a position in a a copyof the specified assembly(b). Dashedlines
showthe resulting adjacencyrelationship E. There maybe
leftover parts.
placed on the surface of someliquid and gently shaken.
Tiles with hydrophobicedgesare attracted along those edges
while hydrophylicedgesrepel. Striking "crystals" emergeas
larger and larger structures self assemble.Byusing different
shapesand edgetypes, different gross structures can be created. At least twonext steps are apparent. First, these and
similar methodsgenerallyproducearrays or lattices of parts,
meaningthat there is no wayto terminate a regular pattern
at, say, a 5 x 5 array of parts. Second,there is no known
formal methodof starting with a specification of the desired
emergentstructure and devisingthe structure of the individual parts. In this paper we address both of these issues by
supposingthat each part can run aprograrnthat tells it when
to join with another part, and whento repel it, basedon an
appropriately synthesizedlookuptable.
The Problem
Weconsider a simple form of assemblyprocess by assuming
that parts are programmable
and able to sense the position
and state of other nearbyparts. Westart with mdisk-shaped
parts (of radius r) confinedto movein 2. Denote the position of part i by the vector xi. Wedesire that each part move
smoothly,without colliding with other parts, so that all n
parts eventually take somerole in an assemblyor formation.
This is showngraphically in Figure 1. For simplicity, we
assumethat the dynamicsof each disk are given by ~ ---- ui.
Let G = (V, E) be a finite undirected, acyclic graph
tree). Wewill call such a graph an assembly. SupposeG =
(V, E) with [VI = n and first consider the case wherera
n. The problemis to producea control algorithmto be used
by each part that will control the mparts to move,without
colliding, fromarbitrary initial conditionsto positions such
that there exists a permutation
h of { 1, ..., m}suchthat
I. If {h(i),h(j)} E Ethend,~br-e < lixi-xjl[ < k,~t~+e;
2. If {h(i), h(j)} ¢ E then ]]xi - xj][ dnbr.
Here d,b~ > 0 and e > 0 are parameters. The image h(i)
of i is called the role of i in the assembly.Wefurthermore
require that these assembliesbe stable to disturbancesin the
sense that the set of points z~ .... , z,n satisfying the above
conditions is an attractor of the closed loop dynamicswe
will construct. If m = kn for somek E Z then we still
require the aboveexceptnowwith respect to a disjoint union
of k copies of G. Andof course, if mis not a multiple
of n, then we require that as manyparts as possible form
assembliesin the obviousway.
Wenote that not all trees can be embedded
in the plane in
such a waythat neighbors are distance dnbr apart and nonneighborsare distance greater than dnbrapart. For simplicity in whatfollows, we restrict the assemblieswespecify to
those that can be so embedded.
Controller Structure
In general we will assumethat parts have limited sensing
and communication
capabilities and we allow themto store
a discrete state, si, along with their control programs.In
particular, weassumethat part i can sense its ownposition
and the positions and discrete states of other parts within
someranged,,,~,= > 0 of xi.
The methodswe develop below will, given a description
of the desired assemblystructure, synthesize a hybrid controller Hi of the form shownin Figure 2. The goal is that
wheneach pan runs a copy of Hi (fromdifferent initial conditions), the parts will self assemble.
The controller Hi is described by a continuous control
law Fi, a predicate A called the attraction predicate and a
discrete update rule y. Fi describes the force that the part
should apply to itself. A(si,sj) {t rue, fa lse} determines whether parts i and j with states si and sj should
try to becomeneighbors,thereby forminga larger assembly.
The update rule 9(si, sj, s~) determinesthe new discrete
state of pank basedon the joining of parts i and j. Loosely,
the operation of Hi is as follows. Pan i starts with some
initial position xi(O), the initial state si(O) = (1, 1)
41
geceivedstate
update
(st,sa)
st +- g(s,,s.s,)
Figure2: Thestructure of the hybrid controller that is constructed by the compilationschemein this paper. Arcsdenote transitions and are labeled by a predicate/action pair.
Whenan arc’s predicate becomestrue, the action is taken
andcontrol transfers fromthe sourceof the arc to the target
of the arc.
neighbors.It then applies the control force Fi(x, ~1, s) to itself until either a newneighboris detectedor it receives a
state update from a neighbor. Here x, ~ and s are mdimensional vectors describing the completestate of the system,
However,
Fi mayonly use the states of the parts within distance dm~zof part i. The force Fi is computedbased on
the position, velocity anddiscrete state of part i andon the
discrete states of the sensedparts.
The task of an automatic synthesis procedure, performed
by what weare calling a compiler, is to take a description
Gspecof a desired assemblyand produceHi -- in this case,
F~, .it and g. Theconstructionof A and 9 are describednext
and the construction of F~, whichrequires A, is discussed
after that.
Compilation
of Assembly Rules from
Specifications
Anassemblycan be specified simply by listing whichroles
in the assemblyare adjacent -- that is, by a graph. As mentioned above, we restrict ourselves to the situation where
the adjacencygraphs are trees, leaving the detail of arbitrary graphs to future work. In any case, we believe that
assemblingan arbitrary graphwill start with the assembly
of a spanningtree of that graph.
Thegoal of this section
is to produce
the attraction predicate A and the update rule g from a specified assembly
Gsz,~c = (V~p~, E,~), which we assume is a tree. This
requires first generatinga set of subassembliesof Gs~eand
then compilingA and 9 from the set.
Discrete State of a Part
Weintend that the parts control themselvesto first formsubassemblies of G~pe~,and from those subassemblies form
larger subassemblies
and so on until G,pecis finally formed.
Thediscrete state of a part must, therefore, include a reference to the subassemblyin which it currently plays a
role. To this end, we build a list of the particular (connected) subassemblies we will allow: 9 = {G1, ..., Gp}.
Werequire that each Gi ¢ S is of the form (V~, Ei) where
l~ -- {1 .... , {V~{}and Ei C I~ x Vii. Althoughthis representation of subgraphsin 9 is arbitrary, becausethe vertices
in ~ could have been namedin other ways, somecormnon
schemeis required for a graceful definition of the states of
parts. Thelist 9 can be built in various ways.Themostobvious wayis to include all O(2n) subassembliesin the list.
Asexpalinedin (Klavins2002), a satisfactory list can also
be built of size O(n).
Thediscrete state of a part consists of a pair si = (j, k)
Z2 wherej is the index of a subassembly
in 9 and k E ~ is a
role in that subassembly.Wedenote the graph obtained from
G1and G2by joining a vertex i E G1to a vertex j E G2by
Gl.i ~ G2.j.
Generating Update Rules
Froman assemblyset S, we can state the definition of A
simply:
Definition 1 GivenS, the attraction predicate J[ is defined
as
A(si, sj) = true ~ 3 G E 9 such that si ¯ sj "~ G.
The symbol _~ denotes graph isomorphism. Wecan also
define the updaterule g.
Definition 2 GivenS and states si and sj with A(si, sy)
true, the update rule g is defined as follows. SupposeG"~
s~ ~ sj has index k in ~, supposeh : si ¯ sj --~ G witnesses
this isomorphismand supposesi = (a, b). Then
g(si,sj, sl) -- (k,h(b’))
where¥ e V(si ~ sj) is the nameof vertex b after taking
disjoint unions in of the $ operation. If A(si, sj) = false
thenthe updaterule is notdefined:g( si, sj, sl ) "-- .1_.
The procedurefor determiningthe values of J[ and g require determining tree isomorphisms-- which, although
tractable (Reyner1977) is likely too time consumingto
done online. Wecan, however, perform all the necessary
computationsoffline by compiling9 into a table. The result is that Hi can makeall discrete transitions essentially
instantaneouslybecauseall that is required is a table lookup. Furthermore,the size of the table is O([~[2n3). [~[ can
taken to be ca, so that even complicatedassembliesrequire
only O(ns) storage. The details are given in (Klavins2002).
Implementation
of Assembly Rules
Completingthe controller Hi shownin Figure 2 requires a
definition of F/as well as somemethodby whichparts can
communicate.In this section we define an Fi and assume
a simple communicationsschemethat works in simulation
and about which we have a preliminary analytical understanding. Wesuppose that parts can only communicatewith
their neighbors.
42
An Example Implementation
For each part i, we can decide, using ./t, whetherpart i
should movetowardj or not. To this end define
sCi) = {j I llxi- z~ll < din,x}
Attract(i) = ({j I A(si, sj)} U Nbrs(i)) n
Repel(i) = ({j I -~(si,s~)} - Nbrs(i)) n
S(i) is the set of parts that i can sense. Notethat these
sets are easily computedfroma table compiledfrom a given
G~p~.Onewayof formingthe control law Fi is to sum, for
each j E Attract(i) a vector field Fatt whichhas an equilibriumset at distance dnb~fromxj and for each j E Repel(i)
a vector field F~pwhichhas xj as a repellor.
For the completecontrol law we use
Fi(x, ~, s)
E F.tt (zi,
x j)
jEAttract(i)
+
~ F~,~(zi,zj)-bxi
O)
j E Repel(i
where b > 0 is a damping parameter. In practice
we assume a maximumactuator force, setting ui -max{u,naz,Fi (x, ~, s)}.
Wehave built a simulation environmentfor the above
systemand investigated a variety of initial conditions,
with varying numbers of agents (from tens to hundreds), and various specifications of the desired assembly Gsp~c. Some simulations can be viewed at
http://www.cs.caltech.edu/,-,klavins/rda/.
Twodeadlocksituations arose in our initial simulations.
First, F mayhave spurious stable equilibriums whichprevent attracting pairs from movingtowardeach other. Second, it is possiblethat the set of currently formedsubassemblies admitno joins in 9. Thatis, it maybe that at sometime
there donot exist parts i andj suchthat Jt(si, sj) is true.
To avoid these situations, we employa simple deadlock
avoidance method. For each subassemblyGkE S we define
a stale time stale(k) E R. Anysubassemblythat has not
changedstate within stale(i) secondsof its formationtime
should(1) breakapart, setting the state of eachpart in it
(1, 1) and (2) haveeach part "ignore"other parts from
sameassemblyfor stale(k) seconds. If kspe~is the index of
G, vee in 9, we set stale(kspee) = ~¢. Theresult is a new
controller Hd,i that checksfor staleness and implements(1)
and (2) above, but is otherwisesimilar to Hi in Figure
Wealso changethe definitions of Attract(i) and Repel(i).
Supposethat Ignore(i) is the set of all part indices that part
i is presently ignoringdue to a staleness break-up.Then
Attractd(i) = Attract(i)Ignore(i)
Repeld(i) = Repel(i) - Ignore(i).
Fi is then changedaccordingly. Usingthis deadlockavoidante measure,we have not yet seen a set of initial conditions for any Gspecwe tried for which our simulation did
not converge upon the maximum
possible numberof parts
playingroles in a final assembly,exceptwhenpartial assemblies were out of sensor range of parts neededto complete
them.
Average
T~.me[sl
70
60
T
All SubassembliesAllowed
~ n Subass~lies Allowed
50
40
30
20
0.1
0.2
0,3
0.4
0.5
0.6
Percent
0.7 Complete
Figure 3: Comparisonof assemblytimes for Salt and GA~,I.
Eachdampoint represents 50 simulations of 110parts.
Analytical
Figure 4: Timeto p-completionversus s(G) for each of the
assembliesof size six, for p E {0.2, 0.6}.
Eachdata point represents 100simulationsof 42 parts.
Results
In (Kiavins 2001) we describe a discrete modelof assembly,
which includes the deadlock avoidence methoddescribed
above, and showTheoremh Every run of the system resuits in a maximalnumberof parts being correctly assembled. The modelis, roughly, as follows: There are no continuous dynamics.Eachpan starts out in state (1, 1) with
no neighbors. At each step, a compatiblepair (accordingto
A) of subassembliesis chosenfromthe set of all subassemblies to be joined. If no such assemblyexists, the smallest
non-final assemblyis brokenup into single-pan assemblies
and the system proceeds. A lemmais then shownthat in
each "epoch"of the system, the numberof subassembliesis
reducedby at least one. Thetheoremis then
Theorem1 Every sequence of the above discrete system
ends with a maximumnumber of final assembles being
formed.
The proof is presented formally in (Klavins2001).
Assembly
Complexity
and Performance
It is informativeto considerthe time it takes until pmparts
are in final assemblies(p E (0, 1]. Wecall this the time to
p-completion.Figure 3 showsthe affect of the size of 9 on
the time to p-completionfor different values ofp.
Anotherfactor that affects performanceis the complexity of the specified tree Gspee, although wemust be careful about what we meanby this. Intuitively it seemsthat
a straight line tree is less complexthan a tree with more
branches. This is because of the wayassemblyoccurs in our
system. A pan mayattracted to another but repelled (possibly) by its neighbors. Themoreneighborsthe latter part
has, the more"difficult" it is for the formerpart to approach
it. Thus, we comeup with a complexity measure~(G) of
graphthat penalizes high branchingfactors therebydescribing how"crowded"it is likely to get during assembly.Let
43
i E V(G) and define d(i) = {j [ {i,j} E E(G)}. Set
7t
K(G) ~ d(i)2"
i=l
Figure 4 showsthe time to p-completionversus it(G) for
eachpossible assemblyof size six, for p E {0.2, 0.6}.
Conclusion
AlthoughTheoremI and simulations suggest that the implementation(particular choice of F/) combinedwith the deadlock avoidanceprocedureproducescontrollers that assemble
a maximum
numberof parts safely (without collisions), this
mustbe verified analytically: A substantial problemrequiring possibly newtools in hybrid systemsanalysis.
There are two reasons for considering only tree shaped
assembliesoverarbitrary (planar) graphs. First, tree isomorphism(required at several steps in the synthesis procedure)
is polynomialin the numberof vertices, whereasgraphisomorphismis (likely) exponential. Second,arbitrary graphs
require certain embeddingsof their subassembliesin order
to assemblethemselves. For example,suppose we assemble
a graphby first assemblinga spanningtree of the graphand
then "closing"it. If werequire the closing procedureto respect the d, br distance requirementswehave used, then the
tree can not cross over itself while closing. This meansthe
tree must assemble to an appropriate embeddingclass -- a
constraint we cannotyet deal with, but plan to addresssoon.
Besides exploring the complexityand performancemeasures we introduced analytically, manyvariations on the
themepresented here should also be explored: hierarchical
assemblywith intermediate goal assemblies, three dimensional assembly(whichhas fewer "closing" problemsthan
in two dimensions), assembly of non-homogeneouspans,
assembly of pans with complex dynamics (e.g. nonholonomic), and so on. Finally, we are exploring hardwareim-
plementations of these algorithms so that the issues of asynchronous processing, inaccurate sensors and faulty communications maybe realistically addressed.
References
Bowden,N.; Choi, L. S., Grzybowski,B. A.: and Whitesides,
G.M.1999. Mesoscaleself-assembly of hexagonal plates using lateral capillary forces: Synthesisusing the "capilary" bond.
Journal of the AmericanChemicalSociety 121:5373-5391.
Breen, T. L.; Tien, J.; Oliver, S. R. J.: Hadzic,T.; and Whitesides, G. M. 1999. Designand self-assemblyof open, regular, 3D
mesostructures. Science 284:948-951.
Klavins, E. 2001. Automaticallysynthesizedcontrollers for distributed assembly:Partial correctness. In CooperativeControl
and Optimization. Presented at Conference.Submittedto Edited
Volume.
Klavins, E. 2002. Automaticsynthesis of controllers for distributed assemblyand formation forming. In Proceedingsof the
IEEEConference on Robotics and Automation. To Appear.
Reyner, S.W. 1977. An analysis of a good algorithm for the
subtree problem. SIAMJournal on Computing6:730-732.
44