From: AAAI Technical Report SS-02-04. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved.
Middlewarefor Robots?
Christopher D. Gill and William D. Smart
Departmentof ComputerScience
Washington
University in St. Louis
One Brookings Drive
St. Louis, MO63130
United States
{cdgiii,wds}@cs.wusti. edu
Abstract
Roboticsystems,particularlythoseinvolvingmultiple
robotsandsensors,are increasinglydistributedandbeterogeneous.Weask the questionwhethermiddleware
canbe usedto build these systems,to alleviate unnecessarycomplexities
of usinglow-leveltools whilestill
preservingnecessarylevels of systemperformance.
We
motivatethe answerto that questionwithpreliminary
performance
studiesof a particularopen-source
middlewareimplementation,
and pose additional openquestions to furtherexplorethe suitability of middleware
in
buildingdistributedroboticssystems.
exactly we meanby ’~aiddleware", and discuss its use in
the context of distributed robotics and embedded
sensor systems. Wethen present somepreliminary experimental results that attempt to quantify boundson the costs of using such middleware,comparedto a simpler informationdistribution mechanism.Finally, we conclude by posing
someopen questions on the use of middlewarefor disu’ibutedrobotics applications.
Middleware
What is Middleware?
for Robots
Bakken(2001) describes middleware
Introduction
"... a class of software technologies designedto help
Roboticssystems inherently require significant interaction
managethe complexityand heterogeneity inherent in
and coordination of diverse hardwareand software elements.
distributed systems. It is defined as a layer of softSpecialized hardware and software maybe appropriate at
ware abovethe operating systembut belowthe applilowlevels, such as within local sensor busses, or actuator
cation programthat provides a common
programming
systems. However,the aggregation of such systems, even
abstraction across a distributed system... In doingso,
within a single robot, requires careful considerationof arit provides a higher-level building block for programchitectural issues to promoteflexibility, performance
and remers than Application Programming
Interfaces (APIs)
use of both hardwareand software. Theseissues are espesuch as sockets that are providedby the operatingsyscially importantwhenwe consideruse that spans families of
tem. This significantly reduces the burdenon applirobots and embedded
systems, types of applications, models
cation programmers
by relieving themof this kind of
of programming,and different kinds of operating environtedious and error-prone programming.Middlewareis
ments.
also informally called "plumbing"becauseit connects
parts of a distributed systemwith data pipes and then
One of the most important problems that must be addressed for a distributed robotics or embedded
systemsappasses data betweenthem."
plication is theuserprogramming
model.
Howmuchofthe
Middlewareresides above the operating system and netdistributed
nature
ofthesystem
should
theuserhavetodeal
layers and provides a consistent distributed programwithexplicitly,
andhowmuchshould
behidden
byabstrac- work
mingmodelto the application developer. Examplesof welltions?
Theanswer
to thisquestion
islikely
to varyfrom
system
to system,
depending
ontheuserandtheapplica- knownmiddlewarearchitectures include:
tion.
Some
users
will
notcare
that
their
system
isdistributed,RPCSun’s original client-server procedural programming
while
others
willwantfine-grained
control
overcertain
asmodel.
pects
ofthedistribution
mechanism.
A major
challenge
in
DCOM
Microsoft’s distributed componentmodel for Windesigning
anarchitecture
fordistributed
applications
ofthis
dowsplatforms.
sortis toprovide
a programming
modelthatallows
both
JavaRMITheJavaCommunity’s
RemoteMethodInvocaviews
toworktogether
seamlessly.
tionmodel
fortheJavalanguage.
Inthispaper,
wediscuss
theuseofmiddleware
fordistributed
robot
control
systems.
Webegin
bydescribing
what
CORBAThe ObjectManagement
Group’s(OMGs)standardforlanguage
andplatform
independent
distributed
Copyright
(~)2002,
American
Association
forArtificial
Intelliobject
computing.
gence
(www.aani.org).
Allrights
reserved.
Why use Middleware?
Middlewareis useful for a numberof reasons whendesigning large, distributed system.
Portability Middleware offers a commonprogramming
modelacross language and/or platform boundaries, as
well as across distributed end systems. Intel-based computers running Microsoft Windows,programmedin Java
can easily communicatewith Motorola-based machines
running Linux, programmedin C++. Most importantly,
this ease of communication
happensseamlessly, without
the application programmer
ever havingto worryabout it.
Reliability If wehavea tried and tested set of middleware,
it can be reused and optimizedwith confidenceover many
applications. It allows the application programmerto
never have to worryabout any of the low-level aspects of
distributed systems development.The same can also be
said for havinga well-tested socket library that is reused
in manyapplications, althoughsuch a library hides fewer
of the low-level details of the communication
from the
programmer.
Managingcumplexity Low-level programming abstractions, such as sockets and threads, can be mademore
accessible through suitable (possibly object-oriented)
libraries.
However, programming combinations of
these abstractions can be excessively tedious and error prone. Programming
within the context of patternaware (Schmidtet al. 2000) middlewarecan drastically
reduce both chanceof introducing errors into the code,
and the amountof pain that the programmer
must endure
whenimplementingthe system.
Why use CORBA?
In this paper, we argue for using CORBA
middlewarefor
distributed robotics and embedded
sensor applications. This
choice is motivatedby two mainfactors, open standards and
platform/language independence.
The CORBAstandard (Object Management Group
2001b)itself is bothopento extensionanduse, and closed to
modification without full review under the OMG
standards
process. This is goodbecauseit meansthat the standard is
relatively stable (betweenmajorrevisions), should remain
general-purpose (since the OMG
has memberswith diverse
application interests), but is still subject to changeas the
technologies involved mature.
CORBA
is also platform and language independent. We
feel that this is especiallyimportantfor applicationsin distributed robotics and embeddedsystems. Manyresearchers
use C or C++to programtheir robots navigation systems,
but feel morecomfortableimplementing
their high-level reasoning systems in Lisp. Wewouldlike to be able to develop
code on our desktops, then deploy in on an embeddedprocessor with the minimum
of alterations. The platform and
language independenceof CORBA
makesthis mucheasier.
Robot-Specific Middleware
Nowthat we have identified what we actually meanby middleware, and motivatedour specific interest in CORBA
mid-
dleware,wego on to lookat someof the issues that are relevant to using middlewarefor robotics and embedded
sensor
applications.
Data Propagation and Fusion Sensor data are responsible for the vast majorityof communications
traffic in a distributed robot or embeddedsensor system. Thesedata can
range from fine-grained readings from a single sensor elementto the results of a complexreasoning process. These
data can also vary in size from a few bytes in size up to
manymillions of bytes, and in granularity of transmission
fromsingle events to continuousstreams. Thesevariations
naturally inducedifferent levels of overhead.Welook at this
issue in somemoredetail, and give somepreliminaryexperimentalresults below.
Concurrency, Coordination and Control Manyforms of
concurrency,coordination and control are useful and often
necessary in a distributed system. For example, consider
a teleoperation task, wherethe teleoperated robot is particularly simple, and does not carry manycomputational
resources. Muchof the sensor interpretation and reasoning is done in a remotemachine, or by a humanoperator.
The controlling system might need to (1) monitor the remote system’s bumpersin order to makelocal navigation
decisions, (2) activate a certain high-cost sensor occasionally, and retrieve its readings and (3) record a stream
profiling data summarizingthe current state of the remote
robot. In the first task, sensitive responseto environmental changes wouldlikely need to be handled in an asynchronous manner, which maysuggest a fine-grained asynchronous event (O’Ryan&Schmidt 1999) push model, from
the remoterobot to the local system.In the secondcase, an
asynchronous messaging (Obj 1998) model would support
multiple concurrentqueries fromthe local end-systemto the
remoterobot. Finally, the third case mightbest be handled
by a standard distributed object computing(DOC)method
invocationfromthe robot to the local system,to ensurethe
profile wasdelivered intact and in sequence.__
An Or mese approaches must ee supponeo searnlessly
and with the minimum
cost to the programmerin maintenance and feature complexity. Webelieve middlewarecan
meet this challenge, offering a consistent and reasonable
programming
environmentfor distributed robotic systems.
Quality of Service The Quality of Service (QoS)requirementsof a robotic systemwill vary according to the current task, the operating environmentand the systemloads.
For example,timeliness constraints for a slow-moving
robot
mappinga static office environmentmight be quite loose,
with few severe consequencesif they are missed. However,
the constraints for a fast-movingautonomous
vehicle, traveling overroughterrain are likely to be verytight, withpotentially disastrous results if deadlinesare missed.Weconsider someof the QoSimplications of middlewarein this
paper. Furthermore,previous research on real-time performance(O’Ryanet al. 2001)and scheduling(Gill, Levine,
Schmidt2001, Loyall et al. 2001; Gill, Cytron, &Schmidt
2002)demonstratesthe suitability of middleware
for enforcing distributed QoSproperties.
Scalable Programming Models System developers require programming
modelsthat are scalable. Anexampleof
such scalability lies in the complexityof the programming
abstractions that are used. A programming
modelthat covers manylow-level details maybecometedious and errorproneto programunless those details are appropriately encapsulatedand can be configuredat higher levels of abstraction. For example, a robot might be able to provide raw
sensor readings, calibration settings and timing information
fromits laser range-finder,and allowthe various settings to
be manipulatedby the programmer.However,it should also
be able to return a "distance to object" reading, using sensible defaults, for the user whois not interested in the exact
settings of the device. This means(at least) twoviews
the samedevice, as a generic distance sensor, and as an actual laser range-finder. A goodprogramming
modelshould
accommodateboth views and allow them to inter-operate
seamlessly. It should also be able to scale across sensors.
For example,the high-level user should be able to ask for
the distances returnedby all sensors on the robot, regardless
Iof type, and get reasonableresults.
Scalability also deals withhoweasyit is, froma software
point of view, to add another robot or embedded
sensor to an
existing system.Ideally, there shouldbe little cost in terms
of programmingtime and integration work. These considerations motivate our interest in CORBA
middleware.The
CORBA
programmingmodel allows programmersto extend
existing interfaces polymorphically,replace instances of objects, and add newobjects to an existing system. Furthermore, CORBA
supports implementations that address the
performance
and footprint issues of scalability, whichis the
subject of the next section.
What About Speed and Bloat?
Oneof the most-cited reasons for not adoptingmiddlewarebased architectures on robotics platformsis that the additional layers of abstraction will slowthings downand cause
codebloat. In this section, we addressthese two issues and
provide the results of someempirical experimentsto support
our claim that middleware
offers a net benefit to developers
of distributed robotic applications.
Speed Results
Toassess the relative time cost of using middleware
for data
transmission, comparedto simple socket data transfer, we
conducted two experiments to benchmarkthe performance
of each approach. These benchmarksare intended not as a
definitive answerto the question of howmucha given system maypay for middleware’sflexibility, but rather to establish reasonable upper and lower boundson those expectations.
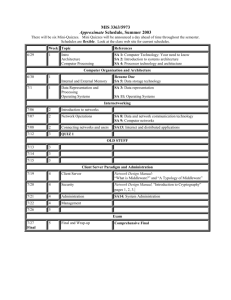
Figure1 showsthe averageresults of ten trials of sending
one million pairs of double precision floating point numbers using TAO(Center for Distributed Object Computing
WashingtonUniversity), a high-performanceand real-time
open-source CORBA-compliant
ORBimplemented in C++.
IWhether
or not this is inherentlya badidea to beginwithis
outsideof the scopeof this paper.
J
~Nm
__
~ mwlm(.Nmm~,w
#(~OAL4L)
~ m~mm.NNm ~mAl
-~mi~mm-w,w~m
(ommjk)
Figure 1: CORBA
Data Transmission BenchmarkResults
Weran each set of trials locally on a server machine,locally on the robot, fromthe server to the robot, andfromthe
robot to the server. The robot computeris an Intel PentiumIII 800Mzbased system, with 128MBof RAM,running a
2.2.19 linux kernel The server is a dual processor PentiumIII IGI-Iz system, with IGBof RAM,
nmninga 2.4.8 linux
kernel. Themachinesare on different subnets, and the communicationbottleneck betweenthem is a standard 802.11
wireless Ethernetlink, runningat 1 IMbits/second.
In each trial we varied the granularity of the transmission by factors of 100, first sendinga single buffer, then
100equal subdivisionsof the data, then 10,000subdivisions,
and finally 1,000,000. Wenote that in the first tworuns,
of I and 100buffer subdivisions, little overheadwas added
by the CORBA
per-call setup itself. Thecost of the transmission includes parametermarshaling, so these represent
a baseline for assessing a lower boundon total achievable
throughput(several opfimizations such as removingendian
marshalingwherepossible could improveon this result for
specific cases). Wealso note that as the per-call overhead
increases, the conuibutionof networkoverheadrelative to
the total overheaddiminishes,resulting in a convergenceof
the local and distributed transmissioncurves.
Wecontrast these results with an implementationusing
sockets, that helps us identify an upper boundon the expected throughputin each case. O’Ryan,et aL, have made
careful studies of the contribution of each infrastructure
componentin TAOto the overall middlewaretransmission
overhead(O’Ryanet al. 2000). Togetherwith our socket results, these profiles helpcalibrate expectationfor the achievable performanceof middlewarefor distributed robotics.
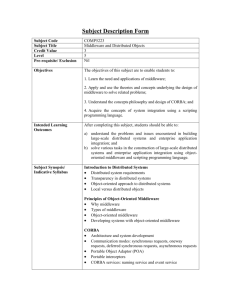
The timings for the socket experiments experiments are
shownin Figure 2. It should be noted that no marshaling
or UNMarshallingof the data is taking place in the socket
implementation.This will cause the amountof computation
being done to be inherently less than in the CORBA
implementation,since the Intel architecture does not natively
use networkbyte order (meaningthat all data are converted
upontransmissionand reception). It does, however,give us
a lower boundon the amountof time needed to ship data
¯ CORBA/NEST
(Subramonian, Gill, & Sharp 2001; Subramonian&Gill 2002) - this approachaddresses reduction of the middleware
infrastructure itself, froma perspective of composingonly the neededfeatures into a
customizedand inter-operable version of the full-featured
middleware.Webelieve this approachis the most suitable
to systemssuch as distributed robotic and sensor systems
in whichdifferent QoSproperties such as timeliness and
footprint mustbe interchangedwith features required by
each application. Byprovisioningexactly the policies and
mechanisms
needed, and moreimportantly supporting integration at the point of composition,we believe sophisticated systemsdesign trade-offs can be achievedwithout
an undueburdenof complexityon the systemdevelopers.
~m~mmm~
Conclusions: Applicability
of Middleware
Although we strongly believe that CORBA-based
middlewareoffers great advantagesfor robotics and embedded
sensor applications,wedo not claimthat it is a goodsolutionfor
between machines.
all such systems.Theapplicability of a middleware
solution
dependsheavily on the hardwareof the systemon whichit
must be deployed,and the applications that it will be runBloat
ning.
Oneargumentagainst middlewareis that it adds unnecesManyrobotics research platforms are based on common
sary bloat to a system. Whilefull-featured middlewareimoff-the-shelf (COTS)
hardware, with computationaland netplementations such as CORBA-compliant
ORBsmay have
workingabilities comparableto a desktop computerworksignificant
memory
footprints,
subsets
ofsuchmiddleware station, and run a "standard"operatingsystemthat controls
canoffer
manyofthebenefits
without
theexcessive
overmostof their operation. Webelieve that it is this class of
head. Current research is exploring various waysto ensure
systemthat will mostbenefit fromthe application of middleonly the necessary features of middlewareare provisioned,
ware. Argumentscan be madethat certain QoSneeds canand thus reducethe overall footprint on a case-by-casebasis.
not be met by such a COTSsolution, and that specialized
The key insight is that the footprint of middlewareis
hardware, operating systems and communicationsinfrasonly appropriate or inappropriate with respect to a particutructure mustbe used. However,there is someevidencethat
lar allocation of resources. Resourcestend to be aggregated
a relatively cheap COTS
systemcan meet relatively strininto hierarchies in distributed systems, with resource-rich
gent real-time QoSdemands.Earlier experiments(Levine et
backbonesconnecting islands of adequate but diminished
aL 1999) on several general-purposeand real-time operatresources, which mayin turn connect resource-attenuated
ing systemsindicated that undercertain conditions generalleaves of the overall sensor/robot network. Three mainarpurposeoperatingsystemscan performin someareas as well
eas of research are addressingthese issues at the leaves of
as, or in somecases better, than someRTOSs.For example,
provisioninghierarchy:
the results of these experimentsshowedthat thread context
switching overheadhad lower latency and jitter in a COTS
¯ RMI/JINI(Sun Microsystems1999) - this approach alopen-sourceLinuxkernel than in all but one RTOS,as long
lows a reduced-feature protocol bridge to inter-operate
as the numberof threads per CPUwas small.
with a full-featured Java middlewareinfrasu’ucture.
Specifically, Jini allowsdeviceswith resourceconstraints
Open Questions
too stringent to support RMI,to interact with endsystems
Rather than drawingconclusions from the preliminary exthat can support RMI.Thus, combiningRMIwith Jini
periments presented in this paper, we will instead end by
allows devices at very small resource scales to be used
asking somequestions. Weconsider these questions to be
within a middlewarecontext.
importantones that should be addressedin any further re¯ CORBA/Smart
Transducers (Object ManagementGroup
search into the use of middleware
on distributed robotic and
2001a) - this approach takes a similar approach to
embeddedsensor systems.
RMI/Jini, but removeslanguage specificity. In partic¯ Whatare the real costs of deployingCORBA-based
soluular, CORBA
supports a variety of language and plattions on standard robotic platforms, such as the RWItype
formchoices. TheSmartTransducersspecification allows
of robot? Furthermore,are there configurationsof system
individual devices to be addressed as though they were
features that increase or decreasethese costs?
on endsystems supporting a complete CORBA
ORB.
¯ Whatare the relevant round-trip latency and data throughThus, the CORBA/Smart
Transducers approach offers adput transmissionprofiles for realistic data transfer patditional transparency to programmersof these kinds of
systems.
terns in common
robotics use-cases?
Figure 2: Socket Data TransmissionBenchmarkResults
4
Canuser studies identify howmiddlewarehelps or hinders ease of programming?
Furthermore, can these studies measurethe perceived performanceimpact of middlewareon robot usability, fromthe user’s perspective?
Whatare the abstractions that are useful to peoplebuilding and using robots? Whichabstractions hold over different communitiesof use (for exampleMLresearchers,
path-planningresearchers, military, etc.)? Whichabstractions extend or specialize the moregeneral abstractions
for particular domains?
Can CORBA-based
approaches be combinedwith simpler
strategies (such as sockets), so that the strengths of one
can makeup for the weaknessesof another?
Howdoes the minimumtransmission (MTU)size
a network affect the tradeoffs between sockets and
CORBA?
Betweensmall, frequent packets and larger, less
frequent ones?
References
Bakken,D. 2001, Middleware.In Urban, J., and Dasgupta,
P., eds., Encyclopediaof Distributed Computing.Kluwer.
to appear.
Center for Distributed Object Computing.
Washington University.
TAO: A High-performance,
Real-time
Object Request
Broker (ORB).
www.cs.wustl.edu/,,~schmidt/TAO.html.
Gill, C. D.; Cytron, R.; and Schmidt,D. C. 2002. Middleware SchedulingOptimizationTechniquesfor Distributed
Real-Timeand EmbeddedSystems. In Proceedings of the
7th Workshopon Object-oriented Real-time Dependable
Systems. San Diego, CA: IEEE.
Gill, C. D.; Levine, D. L.; and Schmidt,D. C. 2001. The
Design and Performanceof a Real-TimeCORBA
Scheduling Service. Real-TuneSystems, The International Journal
of Time-CriticalComputing
Systems, special issue on RealTimeMiddleware20(2).
Levine, D. L.; Flores-Gaitan,S.; Gill, C. D., and Schmidt,
D.C. 1999. Measuring OSSupport for Real-time CORBA
ORBs.In Proceedings of the 4th Workshopon Objectoriented Real-time DependableSystems. Santa Barbara,
CA: IEEE.
Loyall, J.; Gossett,J.; Gill, C.; Schantz,R.; Zinky,J.; Pal,
P.; Shapiro, R.; Rodrigues, C.; Atighetchi, M.; and Karr,
D. 2001. Comparingand Contrasting Adaptive Middleware Support in Wide-Areaand EmbeddedDistributed Object Applications.In Proceedings
of the 2 I st International
Conference on Distributed ComputingSystems (ICDCS21), 625--634. IEEE.
Object Management Group. 1998. CORBAMessaging
Specification, OMG
Documentorbos/98-05-05 edition.
Object ManagementGroup. 2001a. Snu~rt Transducers
Interface. Object ManagementGroup, OMGDocument
orbos/2001-06-03edition.
Object ManagementGroup. 200lb. The CommonObject
Request Broker: Architecture and Specification, 2.5 edition.
O’Ryan,C., and Schmidt, D. C. 1999. Applyinga Realtime CORBA
Event Service to Large-scale Distributed Interactive Simulation. In 5th International Workshopon
Object-oriented Real-Time Dependable Systems. Monterey, CA:TF.~E.
O’Ryan,C.; Kuhns, F.; Schmidt, D. C.; and Parsons, J.
2000. ApplyingPatterns to Developa Pluggable Protocols Framework
for ORBMiddleware.In Rising, L., ed.,
Design Patterns in Communications.CambridgeUniversity Press.
O’Ryan,C.; Schmidt, D. C.; Kuhns,F.; Spivak, M.; Parsons, J.; Pyarali, I.; and Levine, D.L. 2001. Evaluating Policies and Mechanisms
to Support Distributed RealTime Applications with CORBA.
Concurrency and Computing: Practice and Experience13(2):507-541.
Schmidt,D. C.; Stal, M.; Rohnert, H.; and Buschmann,
F.
2000. Pattern-OrientedSoftwareArchitecture: Patterns for
Concurrentand NetworkedObjects, Volume2. NewYork:
Wiley & Sons.
Subramonian, V., and Gill, C. 2002. OMG
WorkshopOn
Embedded&Real-Time Distributed Object Systems. In
Experiences with Middlewarefor a NetworkedEmbedded
Software TechnologyOpenExperimentalPlatform. Object
ManagementGroup.
Subramonian, V.; Gill, C.; and Sharp, D. 2001. OOPSLA2001 WorkshopTowardsPatterns and Pattern Languages for OODistributed Real-time and EmbeddedSystems. In Towardsa Pattern Languagefor NetworkedEmbedded Software Technology Middleware. ACM.
Sun Microsystems. 1999. Jini Connection Technology.
www.sun.com/jini/index.html.