From: AAAI Technical Report SS-94-06. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
TowardA General Dynamic Decision Modeling Language:
An Integrated FrameworkFor Planning Under Uncertainty
Tze-YunLeong
Clinical Decision MakingGroup
MITLaboratory for ComputerScience
Cambridge, MA
leong@lcs.mit.edu
can generatemanyoptimalcoursesof actions or plans, conditional onall possibleevolutionsof the eventsor states in
the environment.
Abstract
Decisionmakingis often complicatedby the dynamismand uncertainty of the information
involved. This paper presents a newmethodology
for formulating,analyzing, and solving dynamic
decision problems.Theproposedformalismintegrates multi-disciplinary approaches; it also
generalizes current dynamicdecision modeling
frameworks.The ontology, graphical presentation, and mathematicalrepresentation of the
decisionfactors are distinguished;modularextensions to the scope of the admissible decision
problemsand systematic improvements
to the efficiencyof their solutionsare supported.
2 Dynamic Decision
Modeling
A dynamicdecision model,e.g., dynamicinfluence diagram [Tatmanand Shachter, 1990], Markovcycle tree
[Hollenberg,1984], or stochastic tree [Hazen,1992], is
basedon a graphicalmodelinglanguagefor visualizing the
relevant variablesin a dynamic
decisionproblem.In general, sucha modelconsists of the followingsix components,
the first five of whichconstitute a conventionaldecision
model:
¯ Aset of decisionnodeslisting the alternative actions that the decisionmakercan take;
1 Introduction
¯ Aset of chancenodesoutliningthe possibleoutcomesor happeningsthat the decision makerhas
Decisionmakingin our daily lives is often complicatedby
no control over;
the dynamism
and uncertaintyof the informationinvolved.
¯
Asingle or a set of valuefunctionscapturingthe
In medicine,for instance, a common
problemis to choose
desirability of eachoutcome
or action;
a courseof optimalIreatmentsfor a patient whosephysical
¯
A
set
ofprobabilistic
dependencies
depicting how
conditions mayvary in time. Dynamic
decision modelsare
the
outcomes
of
each
chance
node
depend
on othframeworks
for modelingand solving such dynamicdecier
outcomes
or
actions;
sion problems.Theseframeworks
are basedon structural
¯ Aset of informationaldependenciesindicating
and semanticalextensions of conventionaldecision modthe informationavailable whenthe decision makels, e.g., decision trees andinfluencediagrams,with the
er
makesa decision; and
mathematical
definitionsof finite-state stochasticprocess¯ Anunderlying stochastic process governingthe
es.
evolutionin time for the abovefive components.
This paper presents a newmethodology
for dynamicdeciIn existing frameworks,the mathematicalproperties of a
sion modeling, called DYNAMOL
(for DYNAmic
decision
dynamicdecision modelare defined with respect to its
MOdelingLanguage). The DYNAMOL
design integrates
approachesand techniquesin AI, decisiontheory, and con- graphicalstructures; solvingsucha modelinvolvesdirectly
the graphicalstructures.
1Iol theory;it supportsformulation,analysis, andsolution manipulating
of dynamicdecision models. DYNAMOL
generalizes existRecently, [Leong,1993] has identified semi-Markov
deciing dynamicdecision modelingframeworks;
it differs from sion processes as a common
theoretical basis of dynamic
previousapproachesby distinguishingthe decision ontolo- decision modeling. DYNAMOL
attempts to integrate the
gy, the graphical presentation, and the mathematical graphicalcapabilities of the existing frameworks,
and the
representation of dynamicdecision problems.The soluconcisepropertiesandvaried solutionsof the mathematical
tions to the models formulated in DYNAMOL,
called
formulations.
policies or decisionrules, are guidelinesfor choosingthe
optimalactions over time to achievesomegoals in a given 3 The DYNAMOLDesign
environment.In the AI planningvocabulary,a dynamicdeTheDYNAMOL
languagehas three distinct but integrated
cision modelcorrespondsto a planningproblem;a policy
155
components:
a dynamicdecision grammar,a graphical presentation convention, and a formal mathematical
representation. Thedecision grammar
allowsspecification
of the decision factors and cons~aints. Thepresentation
convention,in the tradition of graphicaldecision models,
enables visualization of the decision factors and constraints. The mathematicalrepresentation provides a
conciseformulationof the decisionproblem;it admitsvarious solution methods, depending on the different
properties of the formalmodel.
3.1 DynamicDecision Grammar
A dynamicdecision model formulated in DYNAMOL
has
the followingcomponents:1) the time-horizon, denoting
the time-frame
for the decisionproblem;2) a set of valuefunctions, denotingthe evaluationcriteria of the decision
problem;3) a set of states, denotingthe possibleconditions
that would
affect the valuefunctions;4) a set of actions,denoting the alternative choicesat each state; 5) a set of
events, denoting occurrencesin the environment,conditional on the actions selected, that might affect the
evolutionof the states; 6) a set ofprobabilisticparameters,
denotingthe transition characteristics, conditionalon the
actions, among
the states andevents;7) a set of declaratory
constraints,suchas the valid durationof particular states,
actions,events,andprobabilisticparameters;
and8) a set of
strategic constraints, suchas the numberof applicability
for certain actions,the validordering
of a subsetof actions,
andthe time spanbetweenapplicability of twosuccessive
actions.
The dynamicdecision grammarfor DYNAMOL
is an abstract grammar. Following the convention in
[Meyer,1990], this grammar
contains the followingcomponents:
¯ Afinite set of namesof constructs;
¯ Afinite set of productions,eachassociatedwith a
construct.
Anexampleof a production that defines the construct
"model"is as follows:
Model.->name:Identifier;
contexts:
Context-list;
definitions:
Definition-list;
constraints:
Constraint-list;
solution:
Optimal-policy
Eachconstructdescribesthe structure of a set of objects,
called the specimensof the construct. Theconstructis the
(syntactic) type of its specimens.
In the aboveexample,
object with the type Modelhas five parts: name(with type
Identifier),contexts(withtypeContext-list).... etc. Theconstruets/types appearingon the fight-handside of the above
definition are similarly definedby different productions.A
set of primitiveconsmacts/types
areassumed,
e.g, String,
Cumulative
DistributionFunction,
etc.
Therearesome
fixed waysin whichthe structureof a construct can be specified. Theaboveexampleshowsan
"aggregate"
production,i.e., the constructhasspecimens
comprising
of a fixed number
of components.
Othertypes
of productions
include:
"Choice"productions,
e.g., the timedurationin the decisionhorizoncanbe finite or infinite:
"time-duration --> $+ u {0} I oo
"List" productions,e.g. the state-space of the decision
problemconsists of oneor morestates:
State-space ---> State+
The DYNAMOL
grammardefines the structure of a dynamic decisionmodelin termsof its components;
the smJctures
of these components
are recursively defined in a similar
manner.Thegrammar
specifies the informationrequired to
build a model.Onthe other hand, there can be manyways
to manipulatesuch information.In other words, the abstract grammar can support different interface
implementations.For example,an object of type Statespacemaybe specified in 3 different ways:
¯ Text command
interface: Type"state-space state1 state-2 state-3" to command-prompt.
¯ Graphicalinterface: Drawthree state-nodes labeled"state-l,’, "state-2,""state-3"in the display
window.
¯ Routineor codeinterface: Type"(define-statespace ’state-1 ’state-2 ’state-3)" to the Common
Lisp prompt.
Thegrammar
defines the syntax of the language. Thesemanticsof the languageis definedby the correspondence
fromthe constructs to the underlyingmathematicalrepresentation of a semi-Markov
decision process.
3.2 GraphicalPresentation Convention
The graphical presentation conventionin DYNAMOL
prescribes howthe decisionfactors andconstraintsexpressible
in the grammar
are displayed.It is againdefinedin termsof
the correspondencefromthe grammarand graphical constructs to the underlyingmathematical
representationof the
model.Followingthe conventionin decision modeling,for
instance, an action-variableis denotedby a rectangle, an
event-variable an oval, etc. In DYNAMOL,
however,both
declaratoryandstrategic constraintsare also visualizable.
Themodelcan be presentedin part or in wholeas desired.
Moreover,all decision components
can be presentedin different perspectives. Figure1, shownlater in this paper,
depicts twodifferent perspectivesof a simpledynamicde-
156
cision modelfor a medical example.
3.3 Semi-MarkovDecision Process
A dynamicdecision modelspecified in the decision grammar in DYNAMOL
is automatically compiled or interpreted
into a semi-Markovdecision process. The modelspecification maybe more general than the semi-Markovdecision
process definition wouldallow. For instance, the events and
their correspondingconditional probabilities are compiled
into the transition probabilities in the state space of the
semi-Markov process
Formally, a semi-Markovdecision process is characterized
by the following components [Howard, 1971] [Heyman
and Sobel, 1984]:
¯ A time index set ~,
¯ A decision or control process denoted by a set of
random variables
{D(t);te
T}, where
D (t)~ A = { 1, 2 ..... k} is the decision made
at timet; and
¯ A semi-Markovreward process denoted by a set
of random variables {S (t) ;t ~ T], where
S(t) e S = {0, 1,2 .... } is the state of the process at timet, with:
1. an embeddedMarkovchain denoted by a set of random
variables {Sm;m> 0} ; such that Sm = S (Tm), where
T1 < T2 < T3 <... are the randomvariables denoting the
successive epochs (i.e., instants of time) at which the
process makestransitions;
probabilities
sets
of
transition
2. k
{P!.a);i>O,j>O, 1 <a<k} among the states of the
eml~lded chain, such that for any given decision
a ~ A, and states i, j ~ S:
p.C
)
q
= P {Sin+ 1 =Jl Sm=i, Dm= a }
= P{S(Tm+ l) =jIS(Tm)
=i,D(Tm)
=
whichalso satisfies the Markovianproperty:
q
= P{Sm+l =jlSm= i, Dm=a }
= P[Sm+1 =jlSm=i, Sm_l=h .....
Dm = a}
3.k sets of holding times {x~.a);i>0,j>0,
1 <a<k}
amongthe states of the embe~ldedchain, whichare randora numbers with corresponding distributions
{H~a) (n);i>O,j>O, l<a<k}, such that for any
giveh decision a 6 A, and states i, j E S:
(a)
Hij (n)
= P{Tm+I-Tm <nlSm=i, Sm+1 =j, Dm=a }
4.ksetsofrewardsoryields
{r~a)t (l);i>O, 1 <a<k}
associated with the states of the embeddedchain, such
that for any given decision a ~ A, r~a)" (l) is the value
achievable in state i e S of the chain over time interval
(l, l+l).
3.4 Solution Methods
A dynamic decision problem can be expressed as the dynamic programming equation, or Bellman optimality
equation, of a semi-Markovdecision process. For a decision horizon of duration n time units, with a discount factor
9, the optimal value achievablein any state i, Vi , gwenan
initial value Vi (0), is [Howard,1971]:
(n,9)
co
= maxaI~p(a)~n
J
(a)
+ h -ij
ra= !
t r a) (l)
(m)
+
n
~P(ija’ ~ (a, ( m)x
J
ra=l
F~.~m-I
Ll~=O~lr~a) (l) + ~mv; (n-m,
n>O;i,j>O;1
;
11
<a<k
(EO 1)
The first addend in EQ 1 indicates the expected value
achievableif the next transition out of state i occurs after
time duration n, and the second addend indicates the expected value achievable if the next transition occurs before
that time duration. This formulation assumesthe samevalue-function or reward structure r[a) (.)in each state i
conditional on an action a, independentof the next state j.
The most direct solution method, called value iteration, is
to solve the optimality equation shownin EQ1. The solution to such an equation is an optimal policy, i.e., a
sequenceof decisions over time (whichcould be one single
decision repeated indefinitely)
that maximizes
Vstar ? (N), the optimal expected value or reward for
starting state start, at time t = 0, or for decision horizon/Q,
wheren = N - t is the remaining duration for the decision
problem.
For infinite horizon problems,EQ1 simplifies into:
and
157
unchanged;
onlythe valid entities are displayedfor particular timeinstancesor durations.
v7 (~)
= maxa[~Pij
(a) ~ (a)
Ehij (m)
-J
i,j~
0;1 <a<k
Thesenewconstructsdirectly correspondto a generalclass
of semi-Markov
decision processes with dynamicstatespace andaction-space.Thevalue-iteration solution methods as described in EQ1 and EQ2 remain applicable to
these problems.
m= 1
(EQ2)
Mostsolution techniques for existing dynamicdecision
modelingframeworksare based on the value-iteration
method. [Shachter and Peot, 1992] has also employed
probabilistic inferencetechniquesfor solving dynamic
influence diagrams. DYNAMOL,
however,wouldadmit other
moreefficient solutions methodsfor semi-Markov
decision
processes.Forinstance, policyiteration, adaptiveaggregation, or linear programmingmaybe applicable in the
DYNAMOL
frameworkif certain assumptionsor conditions
are met.Theseconditionsincludestationary policies, constant discountfactors, homogeneous
state-space, etc.
4-2 Non-Homogeneous
Transition Probabilities
In manyreal-life examples,the transition probabilitymaybe time-dependent.For example,the morbidityrate of a
patient maydependon his age; a 70 year-old personis more
likely to havea heart attack than a 40 year-old one. Such
time-dependentor non-homogeneous
transition probabilities have been incorporated into DYNAMOL.
Again
extendingthe decision grammar
andgraphical presentation
are straightforward. Extendingthe underlyingmathematical representation leads to redefining the transition
probabilityin Section4.3 as a functionof time. Thevalueiteration methodin EQ1 has to be modifiedaccordingly.
Byseparating the modeling(with the decision grammar)
and the solution (with the mathematicalrepresentation)
tasks, therefore, different solution techniquescan be employed. Moreover,employinga newsolution technique
doesnot involveanychangeto the languageitself; all solution techniques reference only the mathematical
representationof a model.
4.3 Limited Memory
Transitionprobabilities governthe destinationsof transitions. As comparedto a Markovprocess, a Semi-Markov
processsupportsa seconddimensionof uncertainty: duration in a state. A semi-Markov
process is only "semi-"
Markovbecausethere is a limited memory
about the time
since entry into anyparticular state. In somecases, limited
memory
about previousstates or actions are importantin a
4 SupportingLanguageExtension
dynamicdecision problem. For example, having had a
heart attack beforewouldrenderhavinga secondheart atTheinitial version of DYNAMOL
contains only a basic set
can
of languageconstructs; manyof the constraints mentioned tack morelikely duringsurgery. Suchlimited memory
be
incorporated
into
a
semi-Markov
or
Markov
process
by
in Section3.1 are not includedin the initial design. DYtechniques
such
as
state-augmentation.
NAMOL
supports modular extensions to the language
constructs. This section sketches the approachesto adIn DYNAMOL,
a newset of syntactic constructs can be indressing someof these issues; someof these possible
troduced to specify such limited memory.A newset of
extensionshavealreadybeenincorporatedinto the current correspondence
rules will then be incorporatedto perform
version of DYNAMOL.
automatic state-augmentationand calculate the correspondingprobabilistic parameters.Wedo not yet knowif
4-1 Static vs. DynamicSpaces
this processcan be fully automated.Theresulting matheOnlystatic state-spaceandstatic action-spaceare currently matical representation, however,should be a well-formed
allowedin the DYNAMOL
decision grammar.Static statesemi-Markov
decision process; the solution methodswill
spaceindicatesthat the samestates are valid throughoutthe remainapplicable.
decision horizon; static action-spaceindicates that the
sameset of actionsare applicablein eachstate, overtime. 4.4 Strategic Constraints
Theoretically, wecan modelchangesin the state-space or
Strategicconstraintsare closelyrelated to the limitedmemaction-space by providing some"dummy"
states and "no- ory capabilities. Someexamplesof these constraints are"
op" actions. In practice, however,suchextraneousentities
action-number
constraints, whereone or moreactions canmaycompromise
modelclarity andsolution efficiency.
not be applied for morethan a specific numberof times;
The DYNAMOL
decision grammarcan be easily extended and action-orderconstraints, whereoneaction mustalways
to incorporate dynamicstate-space and action-space. New or never follow another action. Thereare two methodsto
productionsfor the corresponding
constructscan be written incorporatesuch constraints into a dynamicdecision modto incorporatethe valid time or durationfor eachstate and el. Thefirst methodis by augmentingthe state-space to
action. Thegraphicalpresentationrules can remainmostly keeptrack of the numberand/or order of the actions ap158
plied; this wouldusually result in a very complexstatespace, compromisingthe clarity of the model. The second
methodis to let the solution moduleworry about keeping
track of the constraints.
In either case, new constructs can be introduced in DYNAMOL
to express the constraints.
If the’ state-
PTCA,CABG}.For ease of exposition, assume that each
state s E S is a function of a set of binary state attribute or
health
outcome
variables
0 = {Status, It,tl, Restonosis } , e.g., "Well":=(Status.=
alive, MI = absent, Restenosis = absent), "MI":=(Status
alive, MI = present, Restenosis = absent), etc.
augmentation
method
is adopted,a newset of correspon- A partial modelspecification of the exampleproblemin the
dencerules need to be added as described earlier. If the dynamicdecision grammaris as follows’:
solution methodis responsible for the constraints, these
factors only need to be accessible.
($time-horizon:nature
discrete :duration60:unit month)
($actionmodieal-treatment
:durationall)
5 A Prototype Implementation
i$statewell:duration
all)
($staterestenosis
:duration
all)
¯ ,.
A prototype implementation of DYNAMOL
is currently un($transition
:fromwell:to dead
:transition-probability
0.1
derway. The system is implemented in Lucid Common
:duration30)
Lisp on a Sun Spare Station, with the GARNET
graphics
($transition
:fromwell:to dead
:transition-probability
0.2
package.It includes a graphical user interface that allows
;duration(3160])
interactive modelspecification. The specification can be
($transition
:fromwell:to restenosis)
strictly text-based, or aided by the graphical presentations
($event
hight-fat-diet:outcomes
(true false):predwell
of the available decision variables or constraints. Onlya
:succrestenosis
:condl-probability
<distribution>)
subset of the dynamicdecision grammaris included in the
($event
stress:outcomes
(true false) :predwell
:succ
first version of this implementation,and the solution method supported is value iteration. Future agenda on the
($inlluence
:fromstress:to MI:cond-probability
<distribution>
:duration
all)
project include improving the implementation, extending
and refining the dynamic decision grammar, identifying
($value-function
<function>
:stateall)
meta-level dynamicdecision problemtypes, searching for
($discount-factor
0.8:duration
all)
moreeffective solution methods,and investigating relevant
($action-number-constraint
CABG
:number
3)
issues in supporting automated generation of dynamicdecision models. The current domainfor examiningall these
Figure 1 showstwo graphical perspectivesof someof the
issues is medical decision makingin general.
decisionfactors in this model.
6 An Example
Theproblemis to determinethe relative efficacies of different treatments for chronic stable angina (chest pain), the
major manifestation of chronic ischemic heart disease
(CIHD). The alternatives considered are medical treatments, percutaneous transluminal angioplasty (PTCA),and
coronary artery bypass graft (CABG).The manifestations
of CIHDare progressive; if the angina worsensafter a treat°
ment, for instance, subsequent actions will be considered.
Evenafter successful treatment, restenosis, i.e., renewed
occlusion of the coronary arteries, mayoccur. Hencethe
decisions must be madein sequence. The treatment efficacies in lowering mortality decline as time progresses; the
treatment complications worsenas time progresses. A major complication for PTCAis perioperative myocardial
infarction (MI), or heart attack, which would render
emergencyCABG
necessary. The effectiveness of the different treatments is evaluated with respect to qualityadjusted life expectancy(QALE).
In this problem,assumethat the states S = {"Well", "Restenosis", "MI", "MI+Restenosis", "Dead"} represent the
possible physical conditions or health outcomesof a patient, given any particular treatment a E A = {MedRx,
In termsof the mathematical
representation,the set of actions is A = {MedRx, PTCA, CABG}. The semiMarkov,or in this case, Markovrewardprocess,with time
indexset T ~_{0, 1, 2 .... } , is definedby: 1) the embedded Markov chain with state-space S = {"Well",
"Restenosis", "MI", "MI+Restenosis","Dead"} as illusmated
in Figure1 a; 2) threesets of transition probabilities
among
the states in S, corresponding
to the actions in A;
3) constant holding times with distributions
H~/a)(n) = 1 (n - 1), where1 (n - 1) is a step function
at time n = 1 (in anyunit); and4) three sets of rewards,
correspondingto the amountof QALE
achievableper unit
timein eachstate in S, with respectto the actionsin A.
7
Related Work
This work is based on and extends existing dynamicdecision modeling frameworks such as dynamic influence
diagrams, Markovcycle trees, and stochastic trees. It also
integrates manyideas in control theory for the mathematical representation and solution of semi-Markovdecision
t. Theseare approximations
to the graphicalinterfacecommands;the plaintext command
interfaceis not complete.
159
..,...~.,...,..,..,..,..~..
.~...~.~.~.~.,..,.:
.,...
~:‘‘~‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘~‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘~‘‘‘~‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘‘~!
~‘
".:’
~:~i~ii~’
......
.~.~.~’i’i’~.~.~.;J
.....
~i~i~i~i~i~i~:,~’,~’,~:,~’,~i~:,:..~;~’,~i~’~:~;~’,’:’3
ENTITIES-LIFESPAN
~ All
REfiT
ION S-LIFESPAN
= All
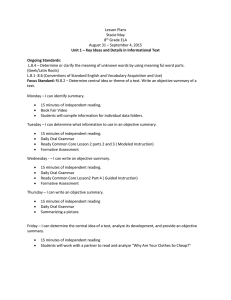
Figure ] Twographical perspectivesof a dynamic
decisionmodel.Figure 1 (a) depicts the Markovstate transition
diagram.Thelinks representpossibletransitions fromonestate to another;givenanyaction; a transition-functionis
usuallyassociatedwith eachlink. Figure1 (b) depictsprobabilistic andinformationaldependencies,
in the convention
of influencediagrams,
among
the decisionfactors at timeunit n.
processes.Thenotionof abstractionthat lies in the core of ticular, the declaratory and strategic constraints are
the methodology
design is a fundamentalconcept in Com- explicitly incorporatedinto the graphicalstructure of the
model;the probabilistic and temporalparametersare exputer Science,andperhapsmanyother disciplines.
plicitly encodedfor each time slice or period considered.
[Egar and Musen,1993] has examinedthe grammarapThe dynamicdecision grammarin DYNAMOL,
on the other
proach to specifying decision model variables and hand,supportsabstract statementsaboutthe decisionsituconstraints. This grammar
is basedon the graphicalstrucation, e.g., statements about the validity duration of
ture of decisionmodel,andhas not beenextendedto handle particular states, statementsaboutthe orderingconstraints
dynamicdecision models. [Deanetai., 1993a], [Dean
on different subsetsof actions, etc. Theseabstract stateet al., 1993b],andother related efforts havedevisedmeth- ments are analogous to the macro constructs in
otis based on Markovdecision processes for planningin
conventionalprogramming
languages. Byfocusing on the
stochastic domains;they apply the mathematicalformula- decision problemontologyinstead of the decision model
tion directly, anddo not addressthe ontologyof general components, DYNAMOL
would provide a more concise
dynamicdecision problems.Muchcan be learned fromthis
and yet moreexpressive platform for supporting model
line of work, however,both in navigating throughlarge
construction.
state spacesfor findingoptimalpolicies, andin identifying
Theadvantagesof the graphicalnature of existing dynamic
meta-levelproblemtypes for devisingsolution strategies.
The graphical representation of semi-Markov
processes decision modelinglanguagesare preservedand extendedin
Thegraphical presentation conventionrenders
has been explored in [Berzuini etal., 1989] and [Dean DYNAMOL.
and constraint examinablegraphiet al., 1992];theyfocusonlyon the single-perspective
pre- every modelcomponent
sentationof relevantdecisionvariablesin a belief network cally. Thedifferent perspectivesin the presentationwould
furthercontributeto the visualizationeaseandclarity.
or influence diagramformalism.
Theoretically, semi-Markov
decision processes can approximatemoststochastic processesby state augmentation
Theresulting state-space, however,
Modelspecification in DYNAMOL
is expressedin a higher or other mechanisms.
may
be
too
complex
for
direct manipulationor visualizalevel languagethan that in existing dynamic
decision modtion.
On
the
other
hand,
efficient solution methodsmaynot
eling frameworks. In frameworks such as dynamic
exist
for
more
general
stochastic
models.Bydistinguishing
influencediagramsor Markercycle trees, mostparameters
the
specification
grammar
and
the
underlyingmathematical
of the modelneedto be explicitlyspecifiedin detail. In par8 Discussion
160
model,DYNAMOL
aims to preserve the clarity and expressivenessof the modelstructure, while minimizing
the loss
of information.This wouldcontribute towardthe ease and
effectivenessof modelanalysis.
Acknowledgments
Egar, J.W. and Musen, M.A. (1993). Graph-grammar
assistance for automatedgenerationof influencediagrams.
In Heckerman,D. and Mamdami,
A., editors, Uncertainty
in Artificial Intelligence: Proceedingsof the Ninth
Conference, pages 235-242, San Mateo, CA. Morgan
Kaufmann.
Hazen,G. B. (1992). Stochastictrees: Anewtechniquefor
temporal medical decision modeling. MedicalDecision
Making,12:163-178.
I wouldlike to thank Peter Szolovits for advising this
project, and MikeWellmanand Steve Pauker for many
helpful discussions. This research was supportedby the
National Institutes of Health Grant No. R01LM04493 Heyman,
D. P. and Sobel, M. J. (1984). Stochastic Models
fromthe National Library of Medicine,and by tile USAF in Operations Research: Stochastic Optimization,
RomeLaboratory and DARPA
under contract F30602-91- volume2. McGraw-Hill.
C-0018.
Hollenberg, J.P. (1984). Markovcycle trees: A new
representation for complexMarkovprocesses. Medical
References
Decision Making,4(4). Abstract from the Sixth Annual
Berzuini, C., Bellazzi, R., and Quaglini, S. (1989).
Meetingof the Society for MedicalDecisionMaking.
Temporalreasoningwith probabilities. In Proceedingsof Howard,R.A. (1971). DynamicProbabilistic Systems,
the Fifth Workshop on Uncertainty in Artificial
volume1 &2. John Wileyand Sons, NewYork.
Intelligence, pages14-21. Associationfor Uncertaintyin
Leong, T.-Y. (1993). Dynamicdecision modeling
Artificial Intelligence.
medicine: A critique of existing formalisms. In
Dean,T., Kaelbling,L. P., Kirman,J., andNicholson,A. Proceedings of the Seventeenth Annual Symposiumon
(1993a). Deliberation scheduling for time-critical
ComputerApplications in MedicalCare, pages 478-484.
sequential decision making. In Heckerman, D. and
IEEE.
Mamdami,A., editors, Uncertainty in Artificial
Intelligence: Proceedingsof the Ninth Conference,pages Meyer, B. (1990). Introduction to the Theory of
Programming
Languages.Prentice Hall.
309-316, San Mateo, CA. MorganKaufmann.
Dean,T., Kaelbling,L. P., Kirman,J., and Nicholson,A. Shachter, R. D. and Peot, M. A. (1992). Decisionmaking
using probabilistic inference methods. In Dubois, D.,
(1993b).Planningwith deadlinesin stochastic domains.
Wellman, M.P., D’Ambrosio, B.D., and Smets, P.,
Proceedings of the Eleventh National Conference on
editors, Uncertainty
in Artificial Intelligence:Proceedings
Artificial Intelligence, pages574-579.
of the Eighth Conference, pages 276-283. Morgan
Dean, T., Kriman, J., and K,~azawa, K. (1992).
Kaufmann.
Probabilistic networkrepresentations of continuous-time
stochastic processes for applications in planning and Tatman, J.A. and Shachter, R.D. (1990). Dynamic
programming
and influence diagrams. IEEETransactions
control. In Proceedings of the First International
on Systems, Man,and Cybernetics, 20(2):365-379.
Conferenceon AI PlanningSystems.
161